File:Open Cube v1.png
Revision as of 10:52, 2 February 2018 by DGoncz (talk | contribs) (DGoncz uploaded a new version of "File:Open Cube v1.png": Nonintersecting tertiary struts make a symmetric solution to the Cartesian motion control problem possible but there is a limitation: the work envelope and every reachable point is X )
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Size of this preview: 599 × 600 pixels. Other resolutions: 240 × 240 pixels | 639 × 640 pixels.
{kind=link}
{kind=link}
Original file (639 × 640 pixels, file size: 114 KB, MIME type: image/png)
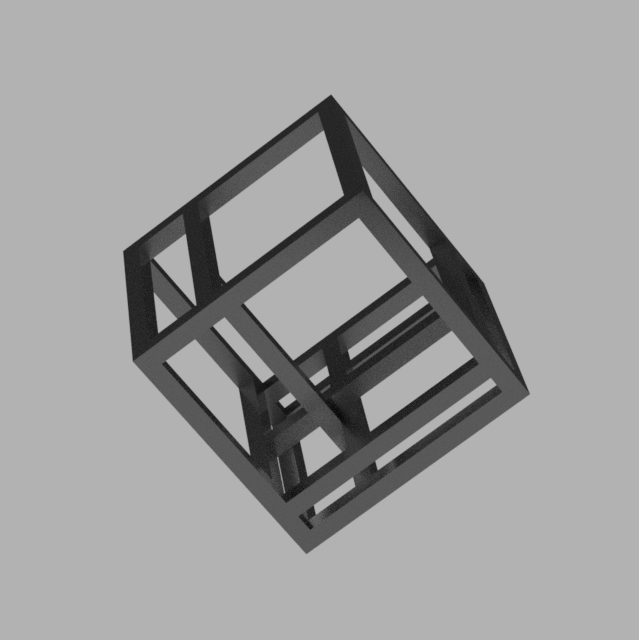
Nonintersecting tertiary struts make a symmetric solution to the Cartesian motion control problem possible but there is a limitation: the work envelope and every reachable point is X < Y-T < Z-T-T where T is the size of the tertiary strut.
File history
Click on a date/time to view the file as it appeared at that time.
| Date/Time | Thumbnail | Dimensions | User | Comment | |
|---|---|---|---|---|---|
| current | 10:55, 2 February 2018 | | 639 × 640 (114 KB) | DGoncz (talk | contribs) | Reverted to version as of 14:52, 2 February 2018 |
| 10:53, 2 February 2018 | 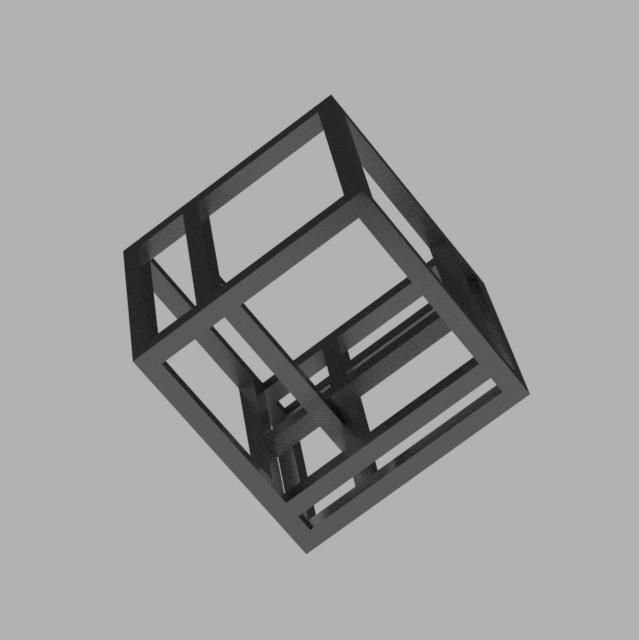 | 639 × 640 (114 KB) | DGoncz (talk | contribs) | Reverted to version as of 14:51, 2 February 2018 | |
| 10:52, 2 February 2018 | 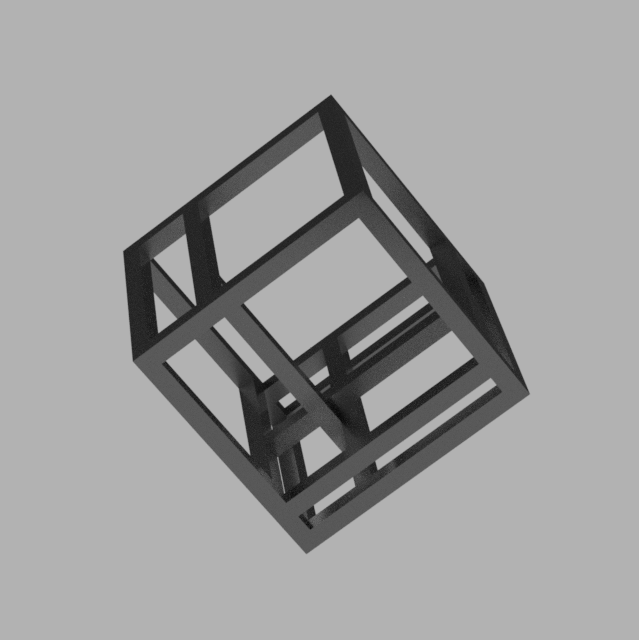 | 639 × 640 (114 KB) | DGoncz (talk | contribs) | Nonintersecting tertiary struts make a symmetric solution to the Cartesian motion control problem possible but there is a limitation: the work envelope and every reachable point is X < Y-T < Z-T-T where T is the size of the tertiary strut. | |
| 10:51, 2 February 2018 |  | 639 × 640 (114 KB) | DGoncz (talk | contribs) | Nonintersecting tertiary struts make a symmetric solution to the Cartesian motion control problem possible but there is a limitation: the work envelope and every reachable point is X < Y-T < Z-T-T where T is the size of the tertiary strut. | |
| 10:10, 2 February 2018 |  | 639 × 640 (278 KB) | DGoncz (talk | contribs) | Nonintersecting tertiary struts make a symmetric solution to the Cartesian motion control problem possible but there is a limitation: the work envelope and every reachable point is X < Y-T < Z-T-T where T is the size of the tertiary strut. |
- You cannot overwrite this file.
File usage
The following file is a duplicate of this file (more details):
{kind=link}
{kind=link}
There are no pages that link to this file.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}