Rambo
Release status: Development

| Description | An all in one RAMPS class motherboard targeting convenience, reliability, and performance
|
| License | |
| Author | |
| Contributors | |
| Based-on | |
| Categories | |
| CAD Models | |
| External Link |
Contents
Summary
RAMBo (RepRap Arduino-compatible Mother Board) is an all in one RAMPS class motherboard targeting convenience, reliability, and performance.
More info coming soon...
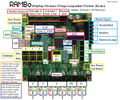
All connectors
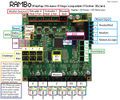
Main connectors

Auxiliary connectors

Schematic

Top/1st copper layer

Ground/2nd copper layer
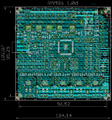
Supply/3rd copper layer

Bottom/4th copper layer








Features
Logic
- Arduino MEGA compatible Atmega2560 and Atmega32u2 processors are compatible with all RAMPS class firmwares
- Crystals for both usb and mcu (timing accurate to 10ppm)
- 4 Thermistor jacks
- All extra pins broken out on both processors (allows using the 32u2 for LUFA AVR programmer, etc.)
- 2 channel SDRAMPS compatible SPI breakout
Motor Drivers
- 5 A4984 1/8th microstep motor drivers (2 connectors on Z for Prusa Mendel)
- Digital Trimpot for stepper current control
- Current limit on driver IC VCC to prevent permanent latchup
- Microstep mode configured by MCU through firmware (no jumpers needed)
- Test points for driver control signals
- Step and Direction pins are on their own ports for synchronous movement capability
- Extra driver ports broke out for up to 3 additional drivers
PWM DC outputs (Extruders, Fans, Etc.)
- 5 outputs
- Low resistance mosfets for cool running
- Indicator led for each channel
Power
- Three independent power rails all accepting 10V-26V input voltage
- Heated Bed 14A
- Extruders 5A (fuse can be exchanged for up to 10A capacity)
- Motors and logic 5A (fuse can be exchanged for up to 10A capacity)
- Built in SMPS for 5V generation from 10V-26V Vin
PCB
- 4 layer
- 2oz copper on all layers
- High quality, High temperature FR4-TG130 PCB
- Gold ENIG finishing
Source
Eagle board, schematic, and a printable pdf of the schematic. File:RAMBo.zip
Motor Current
The current for the stepper motors is set by firmware controlling the digipot. You can verify the max current for each driver by plugging the reference voltage (VREF) measured at the X_REF test point (Y_REF,etc for the other drivers) in the following formula:
ITripMAX = VREF/0.8
This formula is from the Allegro datasheet : ITripMAX = VREF/(8 X RS). RS = 0.1, the value of the sense resistors.