RepRap Self Miniaturization thought
Posted by SOI Sentinel
|
RepRap Self Miniaturization thought September 17, 2007 09:22PM |
Registered: 16 years ago Posts: 113 |
I Was just thinking as I work on a motor control test board schematic. Several of the chips I'm using (DSP, motor driver chips, FETs, LDO's, etc) are surface mount. Some very fine pitch, some coarser. Darwin has a stated accuracy of 0.1mm. Using solder paste this is accurate enough to place most parts.
As an example, a multi-use head of a solder paste dispenser, a 2 DOF vaccuum tool (vertical 2 position solenoid and a servo rotation), and a USB camera feeding back to the control PC would allow a Darwin built on steppers and through-hole components to mostly assemble the board for, say, a Mendel, that's based on SMT and servo motors.
Hot air soldering of this may also be feasible on the current Darwin prototype, but may be a bit tricky later when the work surface is extruded (especially if there's any CAPA in the affected zone). Good time to consider a toaster oven instead.
As an example, a multi-use head of a solder paste dispenser, a 2 DOF vaccuum tool (vertical 2 position solenoid and a servo rotation), and a USB camera feeding back to the control PC would allow a Darwin built on steppers and through-hole components to mostly assemble the board for, say, a Mendel, that's based on SMT and servo motors.
Hot air soldering of this may also be feasible on the current Darwin prototype, but may be a bit tricky later when the work surface is extruded (especially if there's any CAPA in the affected zone). Good time to consider a toaster oven instead.
|
Re: RepRap Self Miniaturization thought September 18, 2007 09:32AM |
Admin Registered: 17 years ago Posts: 1,487 |
|
Re: RepRap Self Miniaturization thought September 19, 2007 02:31AM |
Hi Zach,
why not playing around with parallel kinematics and a tripod/hexapod-systems?
Mostly parallel kinematics or complete ready-to-use-tripods can be made with a 3D-Printer in a single sheet and folded up to the final form and settled down on fixed linear motors.
Then you have no bearings or other komplex mechanical parts, the structure is moving/deformating over flexure hinges and the stability can be very high, if there are stiff sticks molded in ...
Most work is then the software, which translate the stl-data in polar-coordinates or adapt the movement of the tripod to orthogonal paths.
Ciao, VDX
why not playing around with parallel kinematics and a tripod/hexapod-systems?
Mostly parallel kinematics or complete ready-to-use-tripods can be made with a 3D-Printer in a single sheet and folded up to the final form and settled down on fixed linear motors.
Then you have no bearings or other komplex mechanical parts, the structure is moving/deformating over flexure hinges and the stability can be very high, if there are stiff sticks molded in ...
Most work is then the software, which translate the stl-data in polar-coordinates or adapt the movement of the tripod to orthogonal paths.
Ciao, VDX
|
Re: RepRap Self Miniaturization thought September 19, 2007 09:44AM |
Admin Registered: 17 years ago Posts: 1,487 |
|
Re: RepRap Self Miniaturization thought September 19, 2007 10:27AM |
Hi Zach,
... here in 'old germany' i have some companies, whom i can email my stl-files and some days later i would receive the molded or sintered parts for some hundred euros or so (3d-systems.com, 4d-concept, objet, dimension printing)
Sometimes, when i wanted to test some technology, i got the parts for free
For testing parallelkinematics i can glue sticks and foils together, it work fine for prototypes, with better materials it can fit for 'real' systems too.
Actually i'm involved in some projects with local institutes for designing micro- and nano-positioners with one-sheet-tripods and piezodrives, here i can 'borrow' some basic designs.
With other flex-structures i designed and build microgrippers for customers and some of our own microassambly-stages.
If you are interested, i can go much deeper in touch, my primary target would be the software for slicing the 3D-data and moving the polypods apropriate ...
Ciao, VDX
... here in 'old germany' i have some companies, whom i can email my stl-files and some days later i would receive the molded or sintered parts for some hundred euros or so (3d-systems.com, 4d-concept, objet, dimension printing)
Sometimes, when i wanted to test some technology, i got the parts for free
For testing parallelkinematics i can glue sticks and foils together, it work fine for prototypes, with better materials it can fit for 'real' systems too.
Actually i'm involved in some projects with local institutes for designing micro- and nano-positioners with one-sheet-tripods and piezodrives, here i can 'borrow' some basic designs.
With other flex-structures i designed and build microgrippers for customers and some of our own microassambly-stages.
If you are interested, i can go much deeper in touch, my primary target would be the software for slicing the 3D-data and moving the polypods apropriate ...
Ciao, VDX
|
Re: RepRap Self Miniaturization thought September 19, 2007 05:27PM |
Admin Registered: 16 years ago Posts: 13,886 |
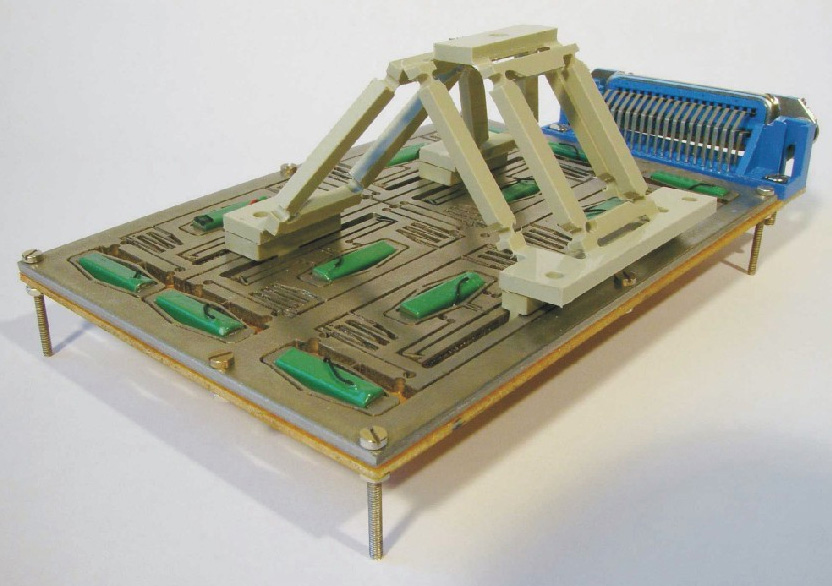
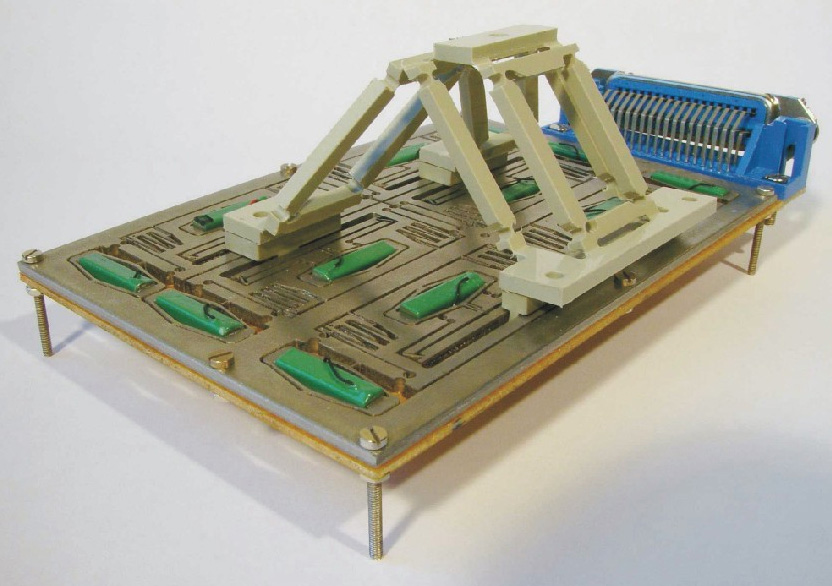
... here i have an image of an milled 'one-sheet-tripod'-system settled on an array of pzt-linear-motors.
This system is capable of some centimetres way in X, Y and Z with an accuracy in the submicron range.
The image of the 'black beetle' is an example of an 'sticky' hexapod ...
The tripod-mechanic is very easy to design and to build, so the overall assembly reduces to a basis with 3 linearmotors (with encoders), the fixing parts and the toolhead ...
Ciao, VDX
***
PS: courtesy and credit-infos for the images:
The 'one-sheet-tripod' (Tripod-2.jpg) comes from the dissertation of Dr.-Ing. Uwe Jungnickel from Technical University of Darmstadt:
[www.emk.tu-darmstadt.de]
The Image of the 'black beetle' comes from Leipzig University of Applied Sciences, where M. Krabbes and Ch. Meissner designed and build this hexapod:
[www.modelica.org]
Edited 2 time(s). Last edit at 10/02/2007 04:57AM by Viktor Dirks.
This system is capable of some centimetres way in X, Y and Z with an accuracy in the submicron range.
The image of the 'black beetle' is an example of an 'sticky' hexapod ...
The tripod-mechanic is very easy to design and to build, so the overall assembly reduces to a basis with 3 linearmotors (with encoders), the fixing parts and the toolhead ...
Ciao, VDX
***
PS: courtesy and credit-infos for the images:
The 'one-sheet-tripod' (Tripod-2.jpg) comes from the dissertation of Dr.-Ing. Uwe Jungnickel from Technical University of Darmstadt:
[www.emk.tu-darmstadt.de]
The Image of the 'black beetle' comes from Leipzig University of Applied Sciences, where M. Krabbes and Ch. Meissner designed and build this hexapod:
[www.modelica.org]
Edited 2 time(s). Last edit at 10/02/2007 04:57AM by Viktor Dirks.
|
Re: RepRap Self Miniaturization thought September 19, 2007 07:15PM |
Admin Registered: 17 years ago Posts: 1,915 |

|
Re: RepRap Self Miniaturization thought September 19, 2007 10:18PM |
Registered: 16 years ago Posts: 246 |
|
Re: RepRap Self Miniaturization thought September 20, 2007 01:55AM |
Admin Registered: 16 years ago Posts: 13,886 |

{kind=link}
{kind=link}
{kind=link}
{kind=link}
|
Re: RepRap Self Miniaturization thought September 20, 2007 05:20AM |
Admin Registered: 16 years ago Posts: 13,886 |
Roach_S Wrote:
-------------------------------------------------------
> Ohhhh....chip manufacture....
>
> I want a sub-micron silicon etching head...
Hi Sean,
... the OLED-technology plays with ink-jet-printing of polymers and solvents for additive and/or subtractive manufacturing of organic and anaorganic electronic - here you have a dot-size of merely 30 microns ...
On the other side i invented a very easy and cheap to realize principle of printing or depositing single droplets of low- or high-viscose fluids in the size of some hundred microns down to some nanometers (then naturally with the fitting equipment and tools).
With the right polymers, solvents or acids i can then stack or dissolve micro-parts with nanometer accuracy!
The process is not really fast (i think that 5 droplets per second is my actual limit), but there is much potential for advancing the basics and combine with the afm-folks
Ciao, VDX
-------------------------------------------------------
> Ohhhh....chip manufacture....
>
> I want a sub-micron silicon etching head...
Hi Sean,
... the OLED-technology plays with ink-jet-printing of polymers and solvents for additive and/or subtractive manufacturing of organic and anaorganic electronic - here you have a dot-size of merely 30 microns ...
On the other side i invented a very easy and cheap to realize principle of printing or depositing single droplets of low- or high-viscose fluids in the size of some hundred microns down to some nanometers (then naturally with the fitting equipment and tools).
With the right polymers, solvents or acids i can then stack or dissolve micro-parts with nanometer accuracy!
The process is not really fast (i think that 5 droplets per second is my actual limit), but there is much potential for advancing the basics and combine with the afm-folks
Ciao, VDX
|
Re: RepRap Self Miniaturization thought September 20, 2007 06:10PM |
Registered: 16 years ago Posts: 246 |
Basically, it sounds like you invented part of the toolset to do home printing of micro and nano-electronics. The way that looks to me is some of the necessary capacity to actually turn out more than just the structural bits of another fabricator.
It also suggests to me the ability to prototype chips, and even do "one-off" consumer electronics. Granted, you'd have to leave your reprap running awhile to achieve that end, but I'd be willing to leave a fabricator plugged in and running on downloaded plans for a week or more, if the end product was a bit of high end consumer electronics...say a computer.
Good luck, and I hope you like it here.
It also suggests to me the ability to prototype chips, and even do "one-off" consumer electronics. Granted, you'd have to leave your reprap running awhile to achieve that end, but I'd be willing to leave a fabricator plugged in and running on downloaded plans for a week or more, if the end product was a bit of high end consumer electronics...say a computer.
Good luck, and I hope you like it here.
|
Re: RepRap Self Miniaturization thought September 21, 2007 01:43AM |
Admin Registered: 16 years ago Posts: 13,886 |
Hi Sean,
...there's a lot of work to do, until i can 'print' chips and advanced elektronics, but this is my idea
Actually it's easier to print conections and vias with conductive paste and insert 'normal' chips.
25 years ago i made outline-pcb's with my Atari ST and a $2000-mill.
Maybe with an acid, which will proper remove copper, but not the inc-jet-guts i can make the same with an inc-jet-printer or my nano-droplet-generator?
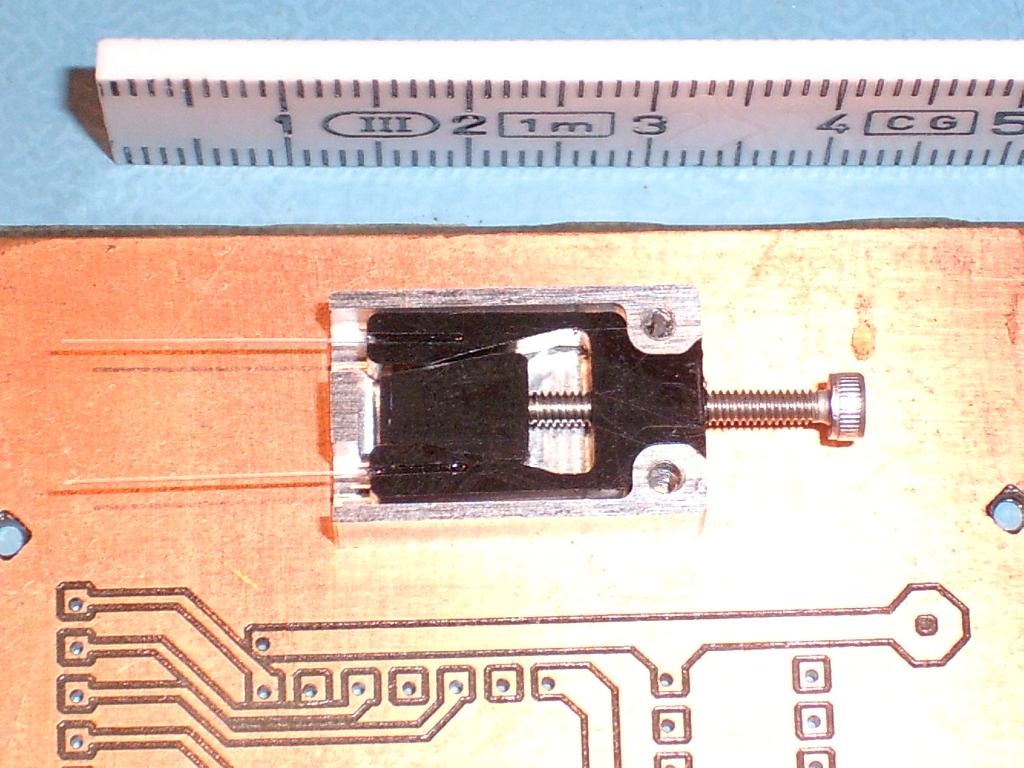
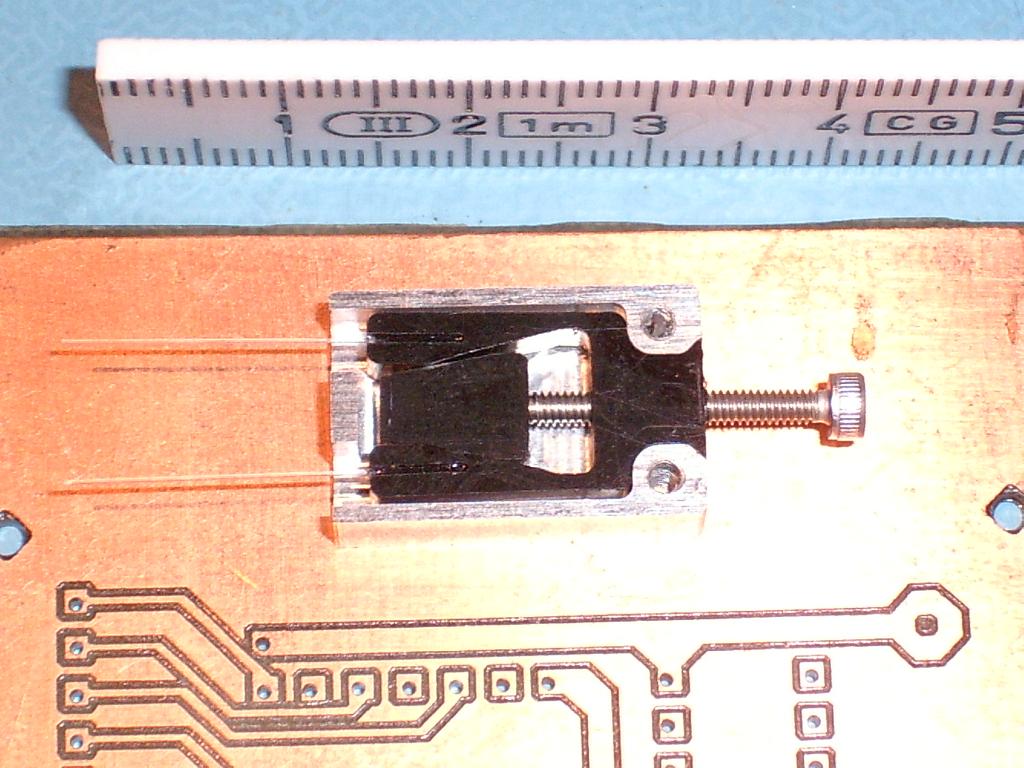
On my daywork i have to design and manufacture micro-sensors with ceramic-inserts or platinum micro-wires with 1 and 10 microns diameter - in the next step, which i'm on evaluating, the thinner wires are 100 nanometers in diameter!
Beside of the sensors i must develop the assembling equipment and manufacturing/assembling processes too, so it would be ideal, if i have a 'reprap-bot' which handles the microparts and completed sensors and builds in the same task the housing, support and pcb around them .
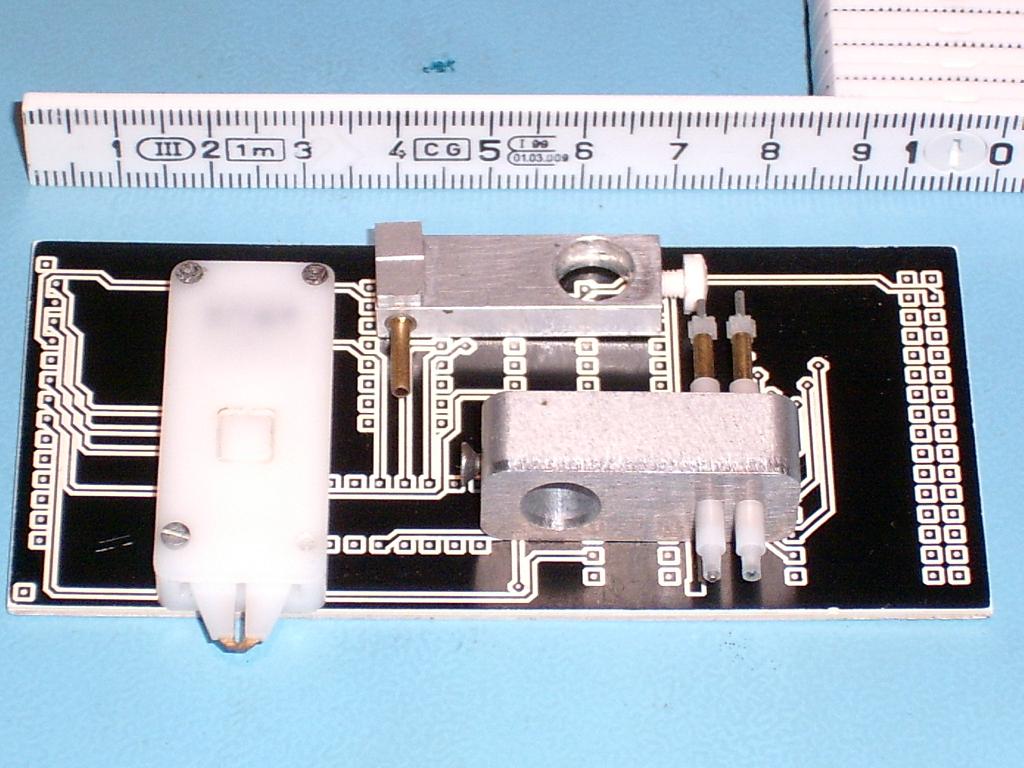
here you have two samples of my old milled pcb's and some home-made micro-tools ...
Bye, Viktor
...there's a lot of work to do, until i can 'print' chips and advanced elektronics, but this is my idea
Actually it's easier to print conections and vias with conductive paste and insert 'normal' chips.
25 years ago i made outline-pcb's with my Atari ST and a $2000-mill.
Maybe with an acid, which will proper remove copper, but not the inc-jet-guts i can make the same with an inc-jet-printer or my nano-droplet-generator?
On my daywork i have to design and manufacture micro-sensors with ceramic-inserts or platinum micro-wires with 1 and 10 microns diameter - in the next step, which i'm on evaluating, the thinner wires are 100 nanometers in diameter!
Beside of the sensors i must develop the assembling equipment and manufacturing/assembling processes too, so it would be ideal, if i have a 'reprap-bot' which handles the microparts and completed sensors and builds in the same task the housing, support and pcb around them .
here you have two samples of my old milled pcb's and some home-made micro-tools ...
Bye, Viktor
{kind=link}
{kind=link}
{kind=link}
{kind=link}
|
Re: RepRap Self Miniaturization thought September 21, 2007 03:37AM |
Admin Registered: 16 years ago Posts: 13,886 |
... as i posted in 'Mechanics':
***
... what about a 'lego-like' pick'n-place-approach?
I imagine a vacuum-dispenser, which grabs very small pre-fabbed bricks or balls from a support and places them on the right place ...
This 'bricks' could come from a sort of magazine, or from a conveyr-belt, on whom a fixed dispenser places single dropplets in the right size ...
Maybe instead of simple droplets there could be more complex forms, so this would be a two-fabber-system: one makes the right micro-shapes, the other one assembly them to the right macro-form ...
The applying to the main body can go over partial IR-heating with a fiber or with a small dropplet of glue or solvent before inserting the brick.
In an advanced multi-fabber-system there could be more sub-fabbers for different materials and supports for pre-manufactured parts, like chips or complex mechanics, so this would go in the direction of automated building of real complex hardware ...
***
This building with prefabbed structures can go on with all kinds of components - you should be able to pause the process, to manually insert sophisticated parts, e.g. bearings, electronic modules, connectors, hydraulics and so on ...
I think, with the right start we can seed centres of 'home-manufacturing' of highly advanced and complex prototypes and single-count series of usefull hardware 'from the scratch' for a tenth of the normaly calculated price.
With a working infrastructure for designing and supporting the community with the right materials there could be a new revolution in manufacturing.
Why not start with 'garage-brews' and interconnect this seeds to virtual companies, which can handle hightech-industrial tasks too?
Bye, Viktor
***
... what about a 'lego-like' pick'n-place-approach?
I imagine a vacuum-dispenser, which grabs very small pre-fabbed bricks or balls from a support and places them on the right place ...
This 'bricks' could come from a sort of magazine, or from a conveyr-belt, on whom a fixed dispenser places single dropplets in the right size ...
Maybe instead of simple droplets there could be more complex forms, so this would be a two-fabber-system: one makes the right micro-shapes, the other one assembly them to the right macro-form ...
The applying to the main body can go over partial IR-heating with a fiber or with a small dropplet of glue or solvent before inserting the brick.
In an advanced multi-fabber-system there could be more sub-fabbers for different materials and supports for pre-manufactured parts, like chips or complex mechanics, so this would go in the direction of automated building of real complex hardware ...
***
This building with prefabbed structures can go on with all kinds of components - you should be able to pause the process, to manually insert sophisticated parts, e.g. bearings, electronic modules, connectors, hydraulics and so on ...
I think, with the right start we can seed centres of 'home-manufacturing' of highly advanced and complex prototypes and single-count series of usefull hardware 'from the scratch' for a tenth of the normaly calculated price.
With a working infrastructure for designing and supporting the community with the right materials there could be a new revolution in manufacturing.
Why not start with 'garage-brews' and interconnect this seeds to virtual companies, which can handle hightech-industrial tasks too?
Bye, Viktor
Sorry, only registered users may post in this forum.