|
Another noncartesic, but very simple 2-axis-positioner ... October 05, 2007 03:50PM |
Admin Registered: 16 years ago Posts: 13,888 |
Hi all,
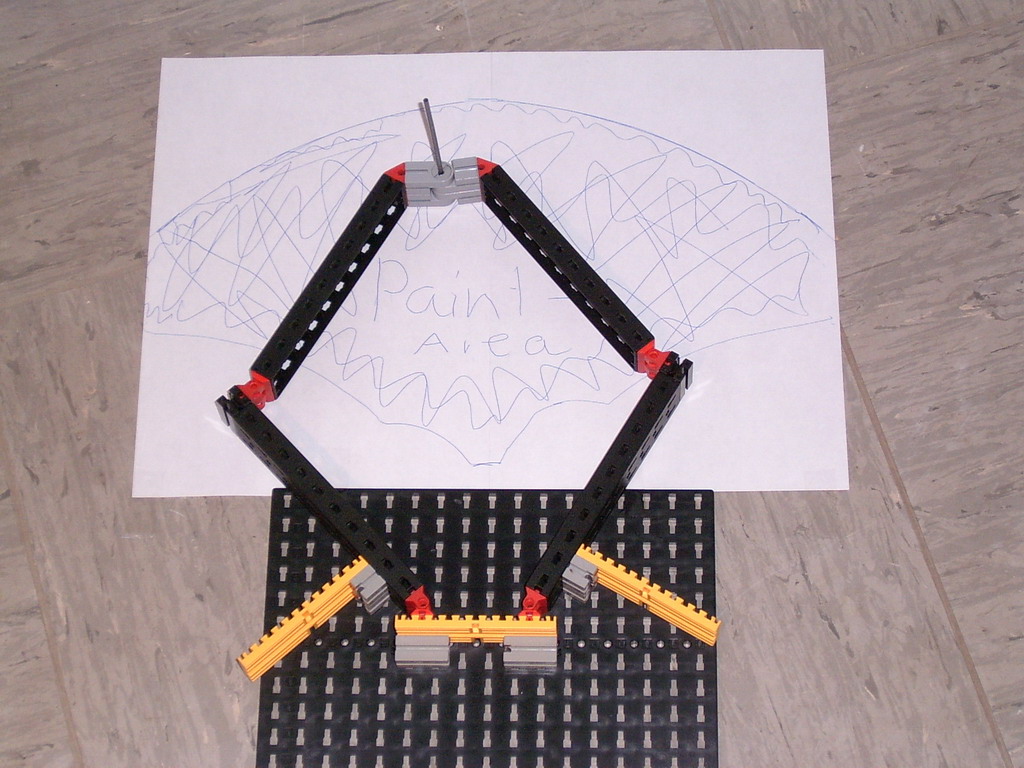
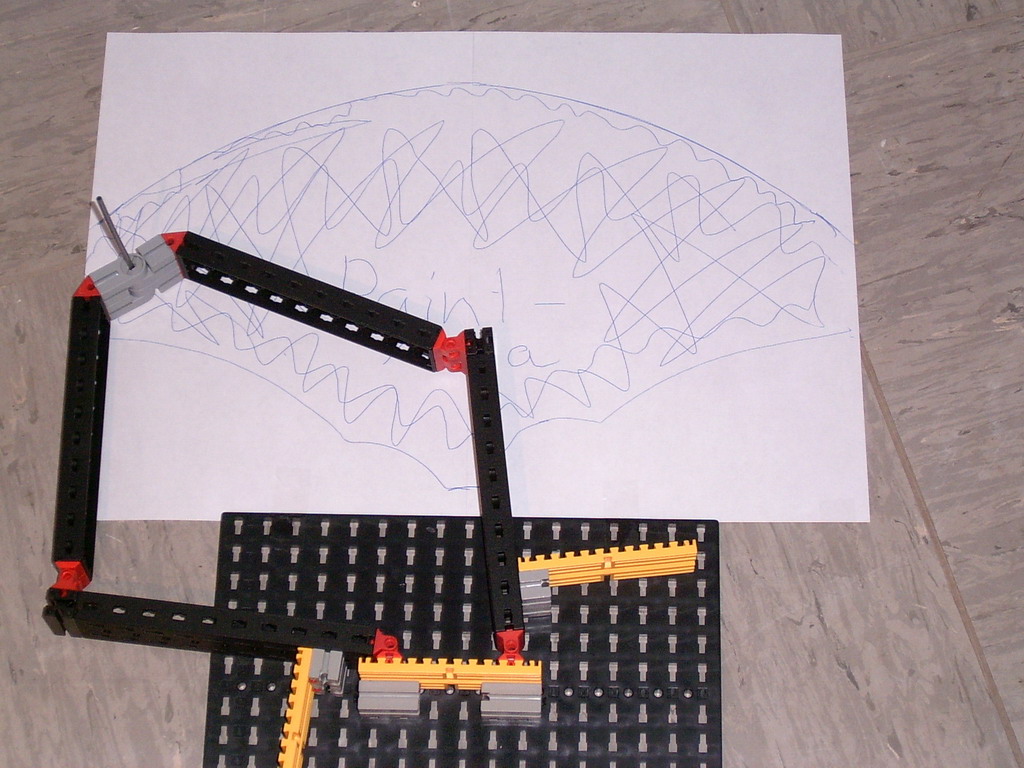
here i have some images of another noncartesic 2-axis-positioner (proof of concept only).
Two motors turn arms (direct or over angular belts), which are closed to a kinematic structure, that can be used for dispensing or other tool-works too.
With stiff arms and compressed slack-free bearings there should be enough stability to perform milling or drilling too!
The working-area isn't rectangular anymore, but big enough (with right arms-diameter) for most works and much bigger, than the outline of the part itself ...
The conversion for the right moving of the motors is much easier, then in the tripod-structure, but here too i'm on evaluating the algorhythms for converting cartesian coordinates in angular movement ...
Viktor
here i have some images of another noncartesic 2-axis-positioner (proof of concept only).
Two motors turn arms (direct or over angular belts), which are closed to a kinematic structure, that can be used for dispensing or other tool-works too.
With stiff arms and compressed slack-free bearings there should be enough stability to perform milling or drilling too!
The working-area isn't rectangular anymore, but big enough (with right arms-diameter) for most works and much bigger, than the outline of the part itself ...
The conversion for the right moving of the motors is much easier, then in the tripod-structure, but here too i'm on evaluating the algorhythms for converting cartesian coordinates in angular movement ...
Viktor
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
|
Anonymous User
Re: Another noncartesic, but very simple 2-axis-positioner ... October 06, 2007 11:46AM |
|
Re: Another noncartesic, but very simple 2-axis-positioner ... October 06, 2007 02:43PM |
Admin Registered: 16 years ago Posts: 13,888 |
Hi drvanthorp,
... here ( [www.mikrogetriebe.de] or [www.harmonicdrive.de] -on the last side) you have a sample of a micro-scara-robot with a similar mechanic - here you have an accuracy in submicron-range.
As you can read above, i wrote "With stiff arms ..." - the arms should be of a leightweight, but stable structure, maybe a honeycomb- or dibond-compound (for example made out of plastic-foam and aluminium-sheets).
- the arms should be of a leightweight, but stable structure, maybe a honeycomb- or dibond-compound (for example made out of plastic-foam and aluminium-sheets).
This kind of stiffening structures with inserting and glueing of aluminium-sheets on reprapped parts can be made for other structural problems too ...
The difference between the outer and inner region isn't so big, but i have to deal with the curved paths, so i will recalculate from the cartesian coordinates in very small steps to the angular positions and rotate the arms very precise to meet the right coordinates along the calculated path.
With my 'proof of concept' the arms rotate only 90 degrees, so i need a very fine encoder (0,01 arc seconds) or a precise (expensive) gearbox without slack.
Another concept with some more angularies to calculate: - with linear drives, which push-pull the arms from the sides, i can build it powerfull, simple and precise with linear screws and need only some more ball-bearing-pairs for horizontal rotating joints ...
Viktor
Edited 2 time(s). Last edit at 10/06/2007 03:39PM by Viktor Dirks.
... here ( [www.mikrogetriebe.de] or [www.harmonicdrive.de] -on the last side) you have a sample of a micro-scara-robot with a similar mechanic - here you have an accuracy in submicron-range.
As you can read above, i wrote "With stiff arms ..."
- the arms should be of a leightweight, but stable structure, maybe a honeycomb- or dibond-compound (for example made out of plastic-foam and aluminium-sheets).This kind of stiffening structures with inserting and glueing of aluminium-sheets on reprapped parts can be made for other structural problems too ...
The difference between the outer and inner region isn't so big, but i have to deal with the curved paths, so i will recalculate from the cartesian coordinates in very small steps to the angular positions and rotate the arms very precise to meet the right coordinates along the calculated path.
With my 'proof of concept' the arms rotate only 90 degrees, so i need a very fine encoder (0,01 arc seconds) or a precise (expensive) gearbox without slack.
Another concept with some more angularies to calculate: - with linear drives, which push-pull the arms from the sides, i can build it powerfull, simple and precise with linear screws and need only some more ball-bearing-pairs for horizontal rotating joints ...
Viktor
Edited 2 time(s). Last edit at 10/06/2007 03:39PM by Viktor Dirks.
|
Anonymous User
Re: Another noncartesic, but very simple 2-axis-positioner ... October 06, 2007 06:18PM |
|
Re: Another noncartesic, but very simple 2-axis-positioner ... October 07, 2007 12:37PM |
Registered: 16 years ago Posts: 622 |
Hi Viktor,
I was wondering, could you provide a link to this page [www.harmonicdrive.de] in english? Sorry for the hassle. I just don't speak German--I assume it's German, I hope. ;-)
Demented Chihuahua
I was wondering, could you provide a link to this page [www.harmonicdrive.de] in english? Sorry for the hassle. I just don't speak German--I assume it's German, I hope. ;-)
Demented Chihuahua
|
Re: Another noncartesic, but very simple 2-axis-positioner ... October 07, 2007 02:43PM |
Admin Registered: 16 years ago Posts: 13,888 |
... the parts of the micro-scara-robot are milled from duraluminium (AlMgSi...), so they are strong enough and merely light - drilled holes in the arms lighten them a bit more too ...
For my test i would prefer a dibond-compound and maybe stacking several milled sheets in a LOM-waffle or so ...
With aiming of a reprappable design there should be tried to build compounds of layered plastics and inserted sheets of a harder material - this make the whole structure as light, as the (maybe honeycombed) plastic and nearly as strong, as the inserted sheets ...
@Demented Chihuahua - here ( [www.harmonicdrive.de] ) is an english text about designing of the robot.
And here ( [www.harmonicdrive.de] ) you can find some more documents ...
Viktor
For my test i would prefer a dibond-compound and maybe stacking several milled sheets in a LOM-waffle or so ...
With aiming of a reprappable design there should be tried to build compounds of layered plastics and inserted sheets of a harder material - this make the whole structure as light, as the (maybe honeycombed) plastic and nearly as strong, as the inserted sheets ...
@Demented Chihuahua - here ( [www.harmonicdrive.de] ) is an english text about designing of the robot.
And here ( [www.harmonicdrive.de] ) you can find some more documents ...
Viktor
|
Re: Another noncartesic, but very simple 2-axis-positioner ... October 08, 2007 07:17AM |
Registered: 16 years ago Posts: 622 |
|
Re: Another noncartesic, but very simple 2-axis-positioner ... October 14, 2007 02:44PM |
Admin Registered: 16 years ago Posts: 13,888 |
Hi all,
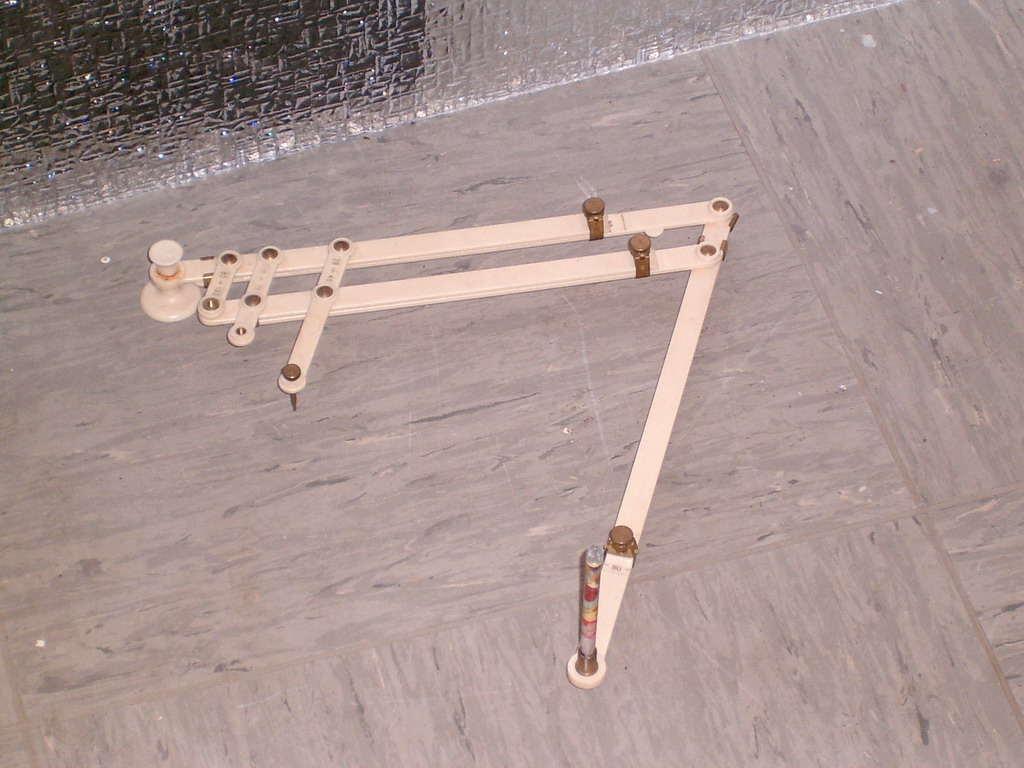
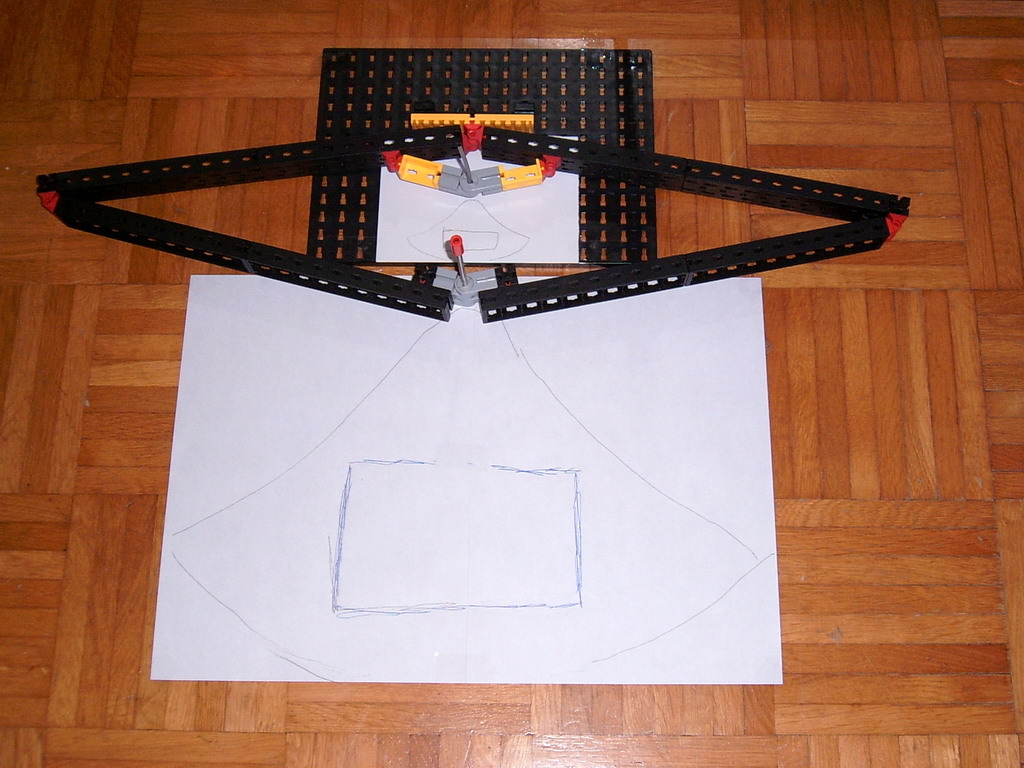
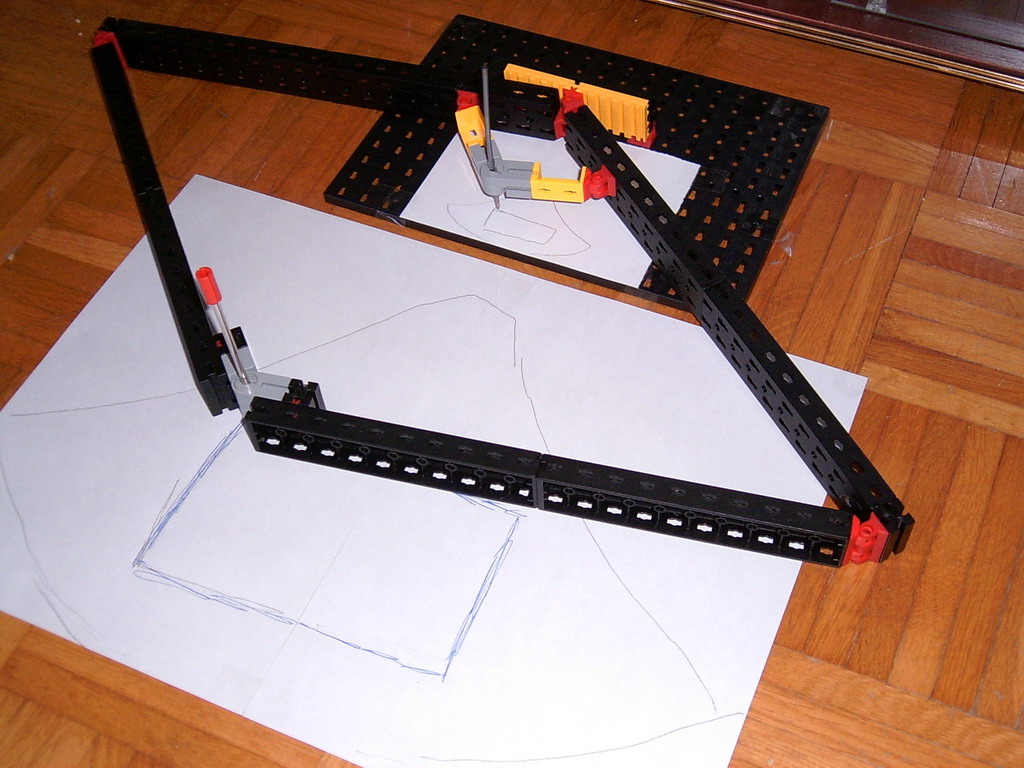
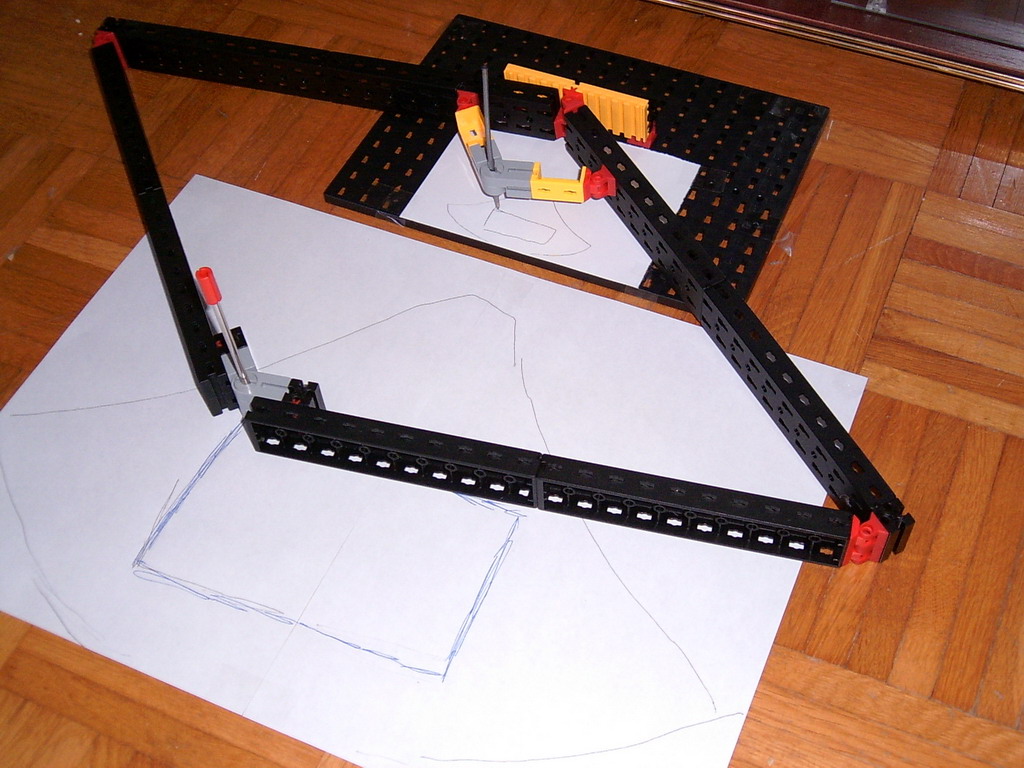
... on sunday i played around with my children and made a second try for a pantograph-sample (see the images)
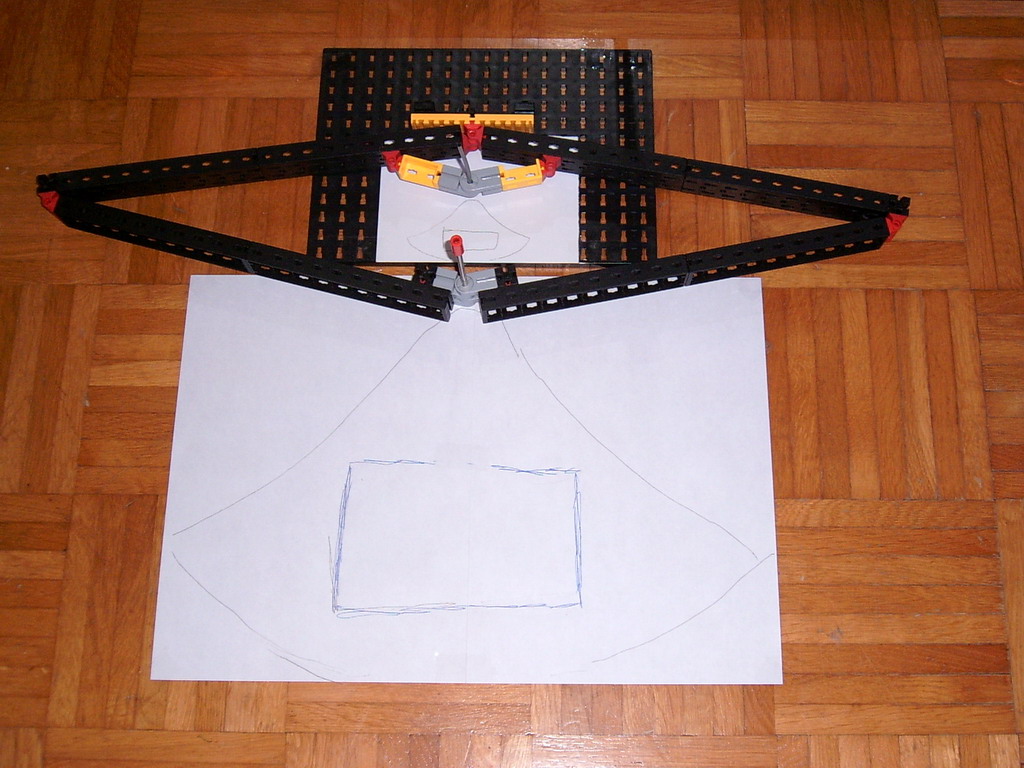
Here you can see an original scaleable oldstyle-2D-pantograph and my 3-dimensional analogon - if i lever the outer pin, the inner pin would go up in the same manner, but scaled down (here nearly 4:1) too!
You may notice, that my sample is overdefined, as it has two arms, but with this method it could be made so stiff, that i can copy and translate 3-dimensional moving with high forces, so milling would be possible too (as in manual or sensordriven copy-mills)
With a lightweight (but a bit stiffer ) system you can easily make a 2-staged very accurate micro-fabber:
- a coarser cartesic system moves the outer pin and the dispenser or toolhead is fixed at the inner pin, which moves over the fabbing area ...
- with scaling down (e.q. 4:1 as in my sample or 10:1 with longer arms) the forces and accuracy at the inner pin are multiplyed by the same number ...
Viktor
Edited 1 time(s). Last edit at 10/14/2007 02:47PM by Viktor Dirks.
... on sunday i played around with my children and made a second try for a pantograph-sample (see the images)
Here you can see an original scaleable oldstyle-2D-pantograph and my 3-dimensional analogon - if i lever the outer pin, the inner pin would go up in the same manner, but scaled down (here nearly 4:1) too!
You may notice, that my sample is overdefined, as it has two arms, but with this method it could be made so stiff, that i can copy and translate 3-dimensional moving with high forces, so milling would be possible too (as in manual or sensordriven copy-mills)
With a lightweight (but a bit stiffer
) system you can easily make a 2-staged very accurate micro-fabber:- a coarser cartesic system moves the outer pin and the dispenser or toolhead is fixed at the inner pin, which moves over the fabbing area ...
- with scaling down (e.q. 4:1 as in my sample or 10:1 with longer arms) the forces and accuracy at the inner pin are multiplyed by the same number ...
Viktor
Edited 1 time(s). Last edit at 10/14/2007 02:47PM by Viktor Dirks.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Sorry, only registered users may post in this forum.