Help needed - surprising direction dependent step loss
Posted by lutz_dd
|
Help needed - surprising direction dependent step loss March 17, 2016 05:22PM |
Registered: 9 years ago Posts: 43 |
I have surprising direction dependent step loss ... setup is
Issue description ...
Is there any idea/direction for the root cause?
- Arduino clone w/ own stepper firmware
- A4988 Pololu with R4 shorted using 16x microstepping sitting on FabScanShield @ 24V power supply
- 42STH38-1684MB-12 stepper motor (0.9deg, 33Ncm) @ 0.8A coil current ... holding torque is high enough to hold the slider at the position even when I try to move it by hand.
- Aluminum-pipes (8mm diameter)
- 3D-printed slide-bearings
Issue description ...
- It runs in one direction without step loss, but running same amout of steps in the opposite direction there are about 2% steps missing.
- When the motor cable connector is flipped the previous nice working direction gets the step losses while the direction with the issues is now running with no step loss.
- If just one wire pair is flipped the previous nice working direction gets the step losses while the direction with the issues is now running with no step loss ... means same as for the entire connector
- For debug purpose it's running slow (1millisec step period) ... no resonance on seen on the timing belt ... runs pretty smooth
- Standalone stepper motor (17HM19-2004S, 0.9deg, 46Ncm) runs fine in both directions with no step loss.
- In case of step loss it can be heard (sparkles in the motor noise) ... direction with no step loss sounds the motor noise "smooth"
Is there any idea/direction for the root cause?
|
Re: Help needed - surprising direction dependent step loss March 17, 2016 05:29PM |
Registered: 11 years ago Posts: 5,780 |
Try swapping in another driver module.
Ultra MegaMax Dominator 3D printer: [drmrehorst.blogspot.com]
Ultra MegaMax Dominator 3D printer: [drmrehorst.blogspot.com]
|
Re: Help needed - surprising direction dependent step loss March 17, 2016 05:36PM |
Registered: 9 years ago Posts: 43 |
|
Re: Help needed - surprising direction dependent step loss March 17, 2016 05:40PM |
Registered: 9 years ago Posts: 43 |
It smells like firmware ... applying +6400 steps runs smooth while -6400 steps runs with sparkles. If the connector is flipped the direction of the slider changes, but the firmware keeps running smooth while doing executing +6400 and the -6400 still comes with the sparkles.
But ... it does not really match to the standalone-motor setup (even a stress test running 50usec step period did not show an issue to me).
Edited 2 time(s). Last edit at 03/17/2016 05:54PM by lutz_dd.
But ... it does not really match to the standalone-motor setup (even a stress test running 50usec step period did not show an issue to me).
Edited 2 time(s). Last edit at 03/17/2016 05:54PM by lutz_dd.
|
Re: Help needed - surprising direction dependent step loss March 17, 2016 05:40PM |
Registered: 11 years ago Posts: 5,780 |
Do your printed bushings allow the carriage to slide smoothly in both directions if you disconnect the belt?
Are you using adequate current for the motor?
Ultra MegaMax Dominator 3D printer: [drmrehorst.blogspot.com]
Are you using adequate current for the motor?
Ultra MegaMax Dominator 3D printer: [drmrehorst.blogspot.com]
|
Re: Help needed - surprising direction dependent step loss March 17, 2016 05:45PM |
Registered: 9 years ago Posts: 43 |
Holding torque (0.8A coil current) does not allow me to move the slider by hand. And in this context I would expect issues in both directions.
The slider runs smooth enough (I think) ... the bushings are not that tight after stress test has been applied.
Edited 1 time(s). Last edit at 03/17/2016 05:52PM by lutz_dd.
The slider runs smooth enough (I think) ... the bushings are not that tight after stress test has been applied.
Edited 1 time(s). Last edit at 03/17/2016 05:52PM by lutz_dd.
|
Re: Help needed - surprising direction dependent step loss March 17, 2016 05:49PM |
Registered: 9 years ago Posts: 43 |
{kind=link}
{kind=link}
|
Re: Help needed - surprising direction dependent step loss March 17, 2016 09:13PM |
Registered: 9 years ago Posts: 1,873 |
|
Re: Help needed - surprising direction dependent step loss March 18, 2016 03:17AM |
Registered: 9 years ago Posts: 43 |
Running at 0.4A has the same issue ... need to lower the current down to 0.25A to have step errors in both directions.
Without additional cooling it is hard to run the boards for a longer time. Short test (until thermal protection has turned off) using 2.2A coil current did not show a change of the described behavior (direction dependency).
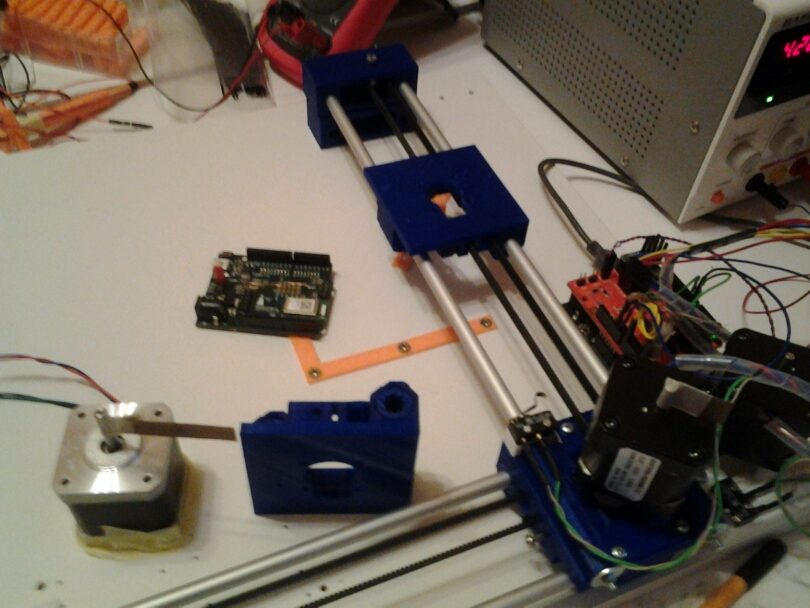
Standalone motor ... please see lower left section of the attached picture in my last reply.
The loaded base axis (see picture) shows the same behavior as the (more or less) unloaded top axis.
Edited 2 time(s). Last edit at 03/18/2016 03:40AM by lutz_dd.
Without additional cooling it is hard to run the boards for a longer time. Short test (until thermal protection has turned off) using 2.2A coil current did not show a change of the described behavior (direction dependency).
Standalone motor ... please see lower left section of the attached picture in my last reply.
The loaded base axis (see picture) shows the same behavior as the (more or less) unloaded top axis.
Edited 2 time(s). Last edit at 03/18/2016 03:40AM by lutz_dd.
|
Re: Help needed - surprising direction dependent step loss March 18, 2016 06:22AM |
Registered: 9 years ago Posts: 1,873 |
|
Re: Help needed - surprising direction dependent step loss March 18, 2016 06:43AM |
Registered: 9 years ago Posts: 43 |
It's having a simple logarithmic ramp starting with 60.0x1ms, going down to 1.0x1ms over 128 steps and vice versa for stopping the motor. A full rotation takes about 8secs at 16x microstepping (6400 steps for one rotation).
Btw. Need to write (hopefully today) a simple test to exclude possible issues in the firmware (e.g. other interrupts may disturb the step control) to sort out the issue mentioned in my 3rd posting.
Edited 3 time(s). Last edit at 03/18/2016 06:49AM by lutz_dd.
- much slower (5 millisec) ... no difference, step loss just in one direction
- twice the speed (500usec) ... no difference, step loss just in one direction
Btw. Need to write (hopefully today) a simple test to exclude possible issues in the firmware (e.g. other interrupts may disturb the step control) to sort out the issue mentioned in my 3rd posting.
Edited 3 time(s). Last edit at 03/18/2016 06:49AM by lutz_dd.
|
Re: Help needed - surprising direction dependent step loss March 18, 2016 03:38PM |
Registered: 9 years ago Posts: 43 |
Thank you folks for your help.
It seems to be the firmware. The attached simple firmware let the motor spin CW / CCW with no step loss (0.3millisec step period, no ramping).
Edited 4 time(s). Last edit at 03/18/2016 03:52PM by lutz_dd.
It seems to be the firmware. The attached simple firmware let the motor spin CW / CCW with no step loss (0.3millisec step period, no ramping).
Edited 4 time(s). Last edit at 03/18/2016 03:52PM by lutz_dd.
|
[Solved] Help needed - surprising direction dependent step loss March 18, 2016 03:53PM |
Registered: 9 years ago Posts: 43 |
For me as of today ... topic accomplished 
PS. The crosstalk from the motor wires to the endstop wire in the same bundle is the root cause. Just for negative step values the firmware evluates the end stop (weak pullup, grounded when active). This topic topic describes the crosstalk issue and solution.
Edited 3 time(s). Last edit at 03/20/2016 03:42AM by lutz_dd.
PS. The crosstalk from the motor wires to the endstop wire in the same bundle is the root cause. Just for negative step values the firmware evluates the end stop (weak pullup, grounded when active). This topic topic describes the crosstalk issue and solution.
Edited 3 time(s). Last edit at 03/20/2016 03:42AM by lutz_dd.
Sorry, only registered users may post in this forum.