Inside-H: Modified H-Bot drive
Posted by LoboCNC
|
Inside-H: Modified H-Bot drive June 03, 2016 12:15PM |
Registered: 10 years ago Posts: 564 |
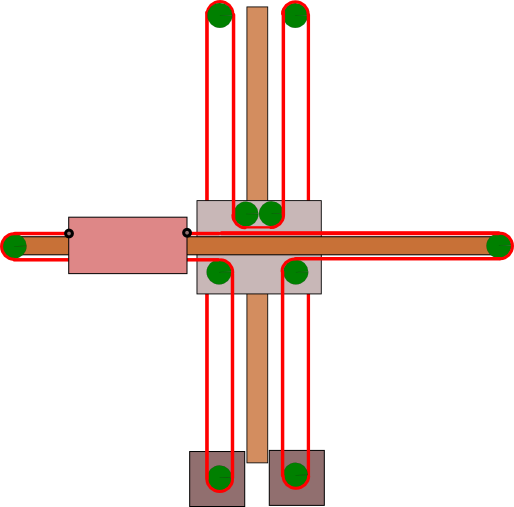
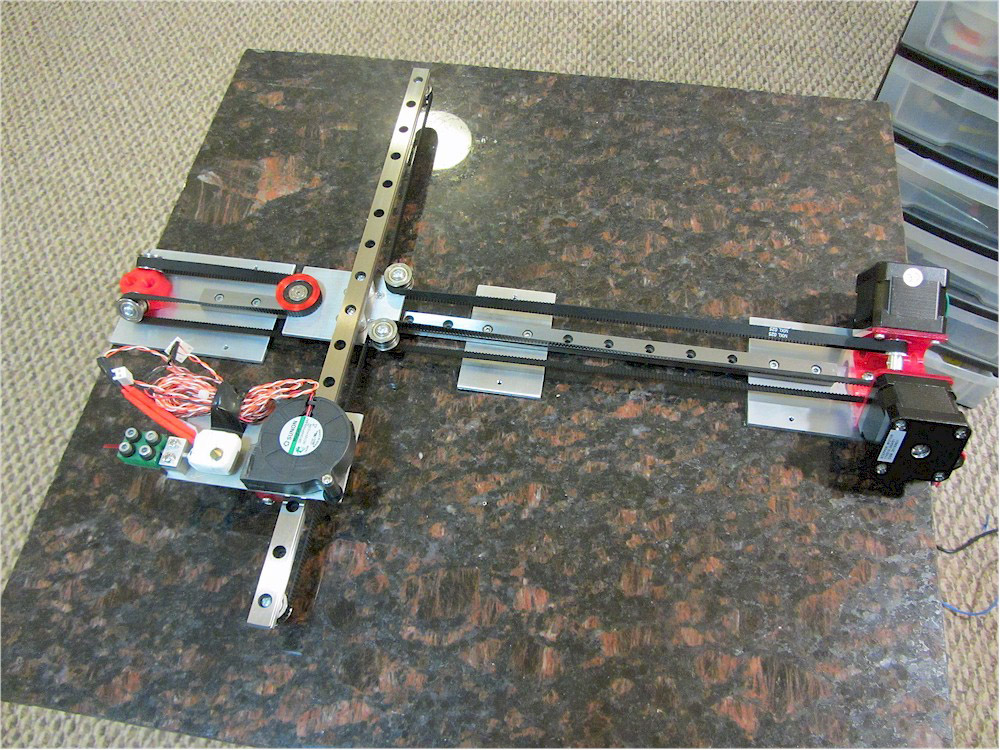
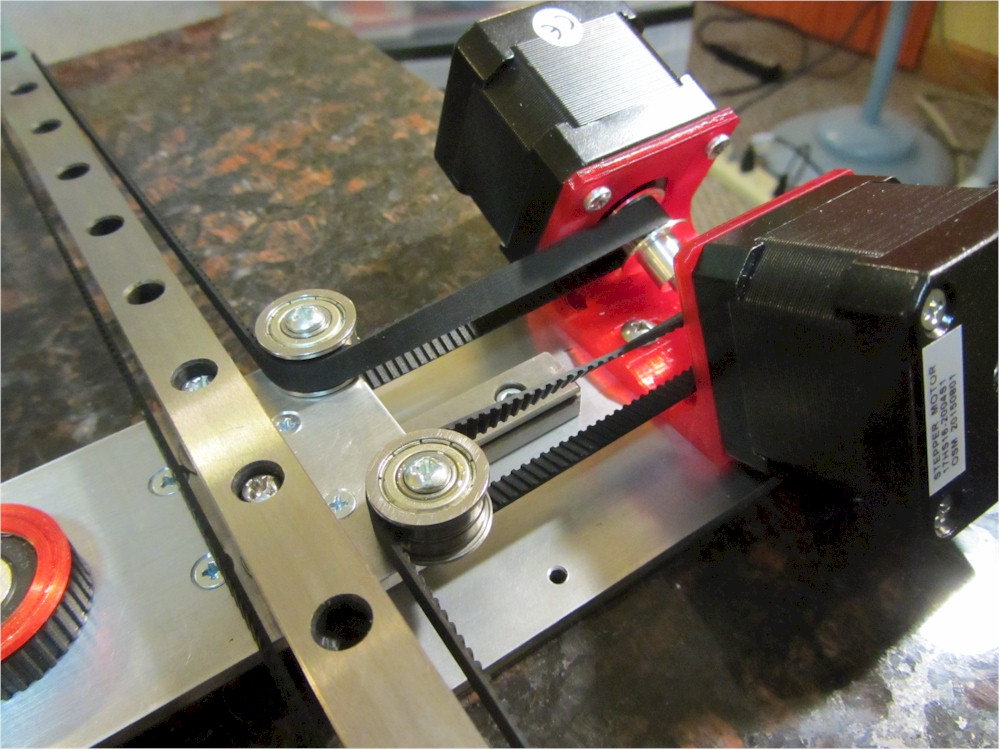
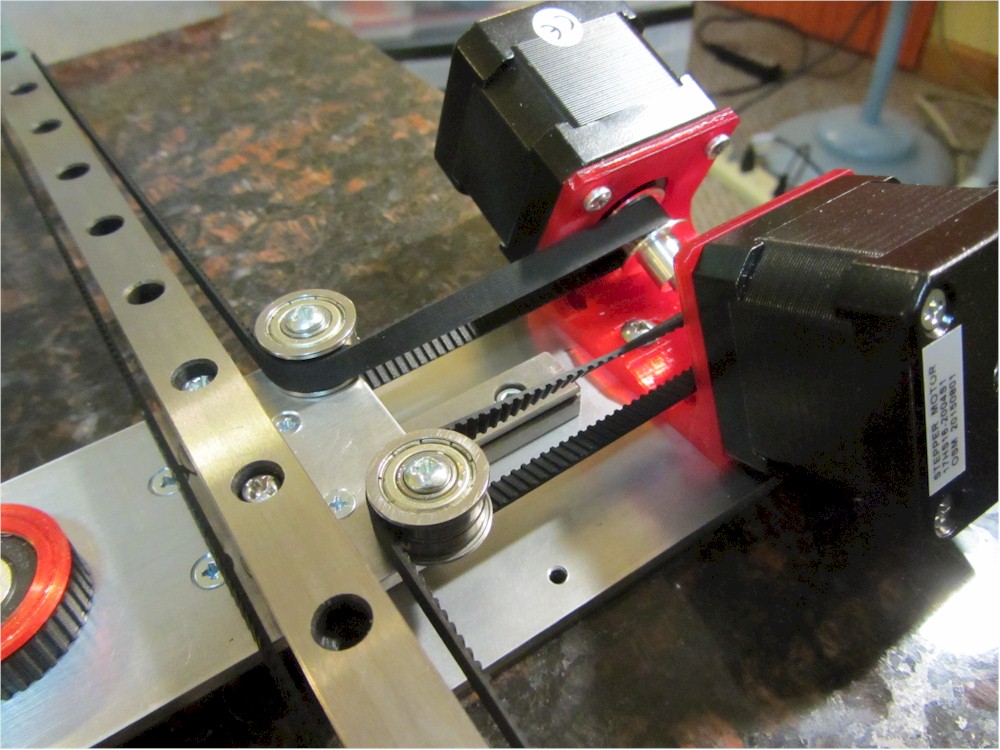
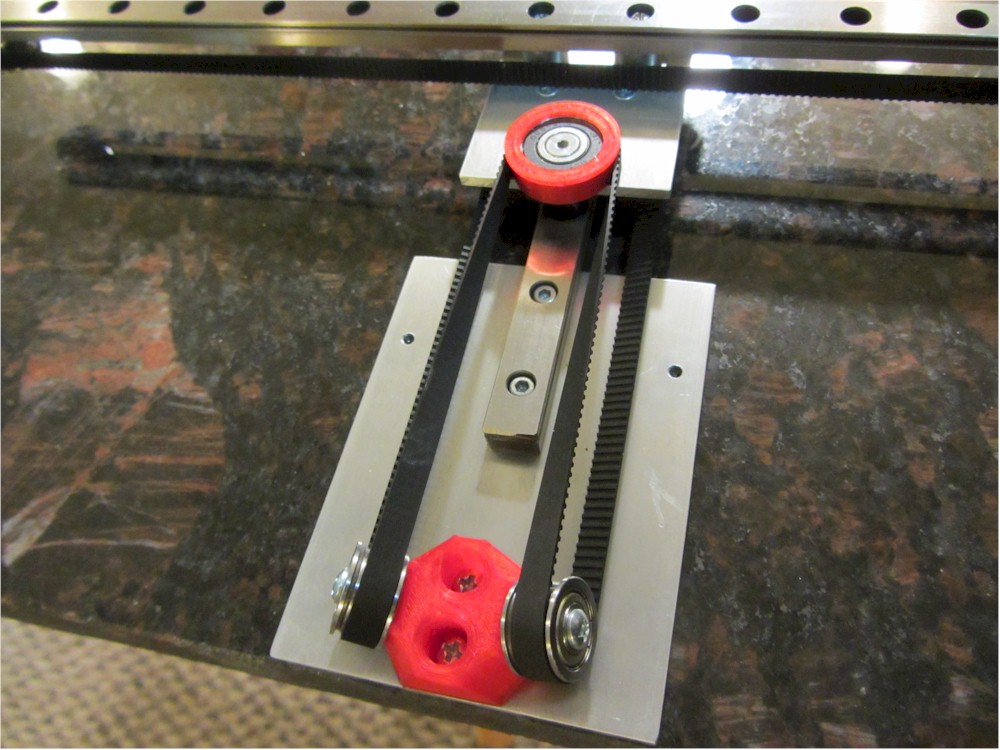
Here are some photos and a video of the modified H-Bot drive I'm going to use for my inverted printer. Instead of the standard H-Bot where the belts run outboard of the extruder carriage, I'm using a single central rail with the sides of the "H" pulled to the inside. This avoids the cocking problems of the standard H-Bot drive. The trick with this design is that it requires the belt to cross itself. Therefore, I have to twist the belt slightly to allow the outside legs run underneath the moving rail. This design also requires the use of an extruder with a right-angle filament feed. I'm using two 400mm linear rails which I've discovered are now insanely cheap ($20 ea), giving me a 350x350mm build area. The whole X-Y mechanism is little more than 2 rails and a couple of flat aluminum plated to hold everything together.
In the video, I've got the speed set at about 300mm/sec (limited by Marlin), acceleration values of 10,000mm/s/s and jerk values of 50mm/s.
youtube video
In the video, I've got the speed set at about 300mm/sec (limited by Marlin), acceleration values of 10,000mm/s/s and jerk values of 50mm/s.
youtube video
|
Re: Inside-H: Modified H-Bot drive June 03, 2016 01:33PM |
Registered: 7 years ago Posts: 78 |
Looks good. However I'm not sure how the central rail and its bearings will handle lateral torsion from the perpendicular moving rail and the hotend/extuder combo being at the extremes. That's why CoreXY implementations have two rails to steady the load. You might get away with a bowden setup and keeping the rails short (400mm you currently have is the max I would go for).
|
Re: Inside-H: Modified H-Bot drive June 03, 2016 03:23PM |
Registered: 9 years ago Posts: 1,873 |
|
Re: Inside-H: Modified H-Bot drive June 03, 2016 04:45PM |
Registered: 10 years ago Posts: 564 |
Quote
JamesK
Wow, that's a neat idea. Looks like the twist gets a bit extreme when the carriage is at the ends of the travel - be interesting to see how that wears. Can't quite visualize how the filament feed path will stay clear of the lower guide...
The belt twist isn't too bad - about 60 deg over 40mm at the extremes. I've done some twisted belt designs in the past and I don't think it'll be a problem. If the belts start to fray, I can always move the motors and bearing block further away to decrease the rate of twist.
The filament feedpath is a little trickier. I haven't installed the bowden tube yet, but it will lie in the XY plane above the lower rail. I'll need to make some guides so that the tube will ride up over the rail and not get caught on the end.
|
Re: Inside-H: Modified H-Bot drive June 03, 2016 04:52PM |
Registered: 10 years ago Posts: 564 |
Quote
ipcalit
Looks good. However I'm not sure how the central rail and its bearings will handle lateral torsion from the perpendicular moving rail and the hotend/extuder combo being at the extremes. That's why CoreXY implementations have two rails to steady the load. You might get away with a bowden setup and keeping the rails short (400mm you currently have is the max I would go for).
The moment rating for the 12mm wide linear guides is 3.7kgf-m. With the bowden extruder I'm using (~100g), the dynamic loading will be a tiny fraction of the rated load.
|
Re: Inside-H: Modified H-Bot drive June 03, 2016 07:33PM |
Registered: 7 years ago Posts: 78 |
Quote
LoboCNC
The filament feedpath is a little trickier. I haven't installed the bowden tube yet, but it will lie in the XY plane above the lower rail. I'll need to make some guides so that the tube will ride up over the rail and not get caught on the end.
You have to be careful at the minimum radius bending of the filament. Some (e.g., wood, carbon fiber) don't like anything under 15-20mm and would snap inside your bowden tube. Given that you're already familiar with the closed loop control, have a look at the tiny extruder we are developing here and you might get away without a bowden and allow the filament to move more freely directly from a spool above the rails.
|
Re: Inside-H: Modified H-Bot drive June 03, 2016 07:37PM |
Registered: 9 years ago Posts: 1,873 |
|
Re: Inside-H: Modified H-Bot drive June 03, 2016 07:38PM |
Registered: 7 years ago Posts: 78 |
Quote
LoboCNC
Quote
ipcalit
Looks good. However I'm not sure how the central rail and its bearings will handle lateral torsion from the perpendicular moving rail and the hotend/extuder combo being at the extremes. That's why CoreXY implementations have two rails to steady the load. You might get away with a bowden setup and keeping the rails short (400mm you currently have is the max I would go for).
The moment rating for the 12mm wide linear guides is 3.7kgf-m. With the bowden extruder I'm using (~100g), the dynamic loading will be a tiny fraction of the rated load.
The rails are 12mm wide but probably 8mm thick and the moving one is like a pair of 20cm ones supported on one end. Any idea how much deflection you get at the end of that rail (I recall some online calculator but can't remember the url)? Do you think vibrations and resonance from say hitting a bump in PLA would have an influence? Just some things to consider.
|
Re: Inside-H: Modified H-Bot drive June 04, 2016 01:49AM |
Registered: 10 years ago Posts: 564 |
Quote
ipcalit
The rails are 12mm wide but probably 8mm thick and the moving one is like a pair of 20cm ones supported on one end. Any idea how much deflection you get at the end of that rail (I recall some online calculator but can't remember the url)? Do you think vibrations and resonance from say hitting a bump in PLA would have an influence? Just some things to consider.
The deflection from the weight of the extruder is probably less than 0.001". It will definitely deflect more if it hits a chunk of filament, but that's usually a good thing - better than knocking your print loose.
|
Re: Inside-H: Modified H-Bot drive June 04, 2016 01:55AM |
Registered: 10 years ago Posts: 564 |
Quote
JamesK
I suspect Lobo is going to design a hotend with the entrance to the melt chamber at 90 degress to the nozzle bore, so the solid filament won't have to negotiate a sharp turn. The seals are a challenge of course.
That's correct - you can actually see the right-angle feed tube for the extruder in the topview photo. The bowden tube goes into the green clamp that has the tiny bit of red filament sticking out. For the seals, I'm using little PTFE gaskets made from thin slices of tubing.
|
Re: Inside-H: Modified H-Bot drive June 04, 2016 04:17AM |
Registered: 8 years ago Posts: 5,232 |
Actually you shoud call it i-bot ( Name maybe taken already?) or +bot
What we see in the video would be upside-down on top of a cantilevered bed?
You're using a lot of flanged BBs for the belt. Any chance to turn the belt around or will you make gt2 pulleys for smoother guides?
Edited 1 time(s). Last edit at 06/04/2016 04:27AM by o_lampe.
What we see in the video would be upside-down on top of a cantilevered bed?
You're using a lot of flanged BBs for the belt. Any chance to turn the belt around or will you make gt2 pulleys for smoother guides?
Edited 1 time(s). Last edit at 06/04/2016 04:27AM by o_lampe.
|
Re: Inside-H: Modified H-Bot drive June 04, 2016 10:42AM |
Registered: 10 years ago Posts: 564 |
Quote
o_lampe
Actually you shoud call it i-bot ( Name maybe taken already?) or +bot
What we see in the video would be upside-down on top of a cantilevered bed?
You're using a lot of flanged BBs for the belt. Any chance to turn the belt around or will you make gt2 pulleys for smoother guides?
I like the "+bot", although I'm not that fond of the "bot" moniker. How about "+drive"?
This particular unit is going to be used in my inverted printer (see http://forums.reprap.org/read.php?1,665310) but you could easily use it pointed downward in a convetional printer.
As for the belts running over bearings, you'll notice that in some places the back side of the belt runs over the bearings and in other places it's the tooth side, so you can't just turn the belt over. I'm actually using MXL belts that have flat topped teeth that don't produce much lumpiness, but if using GT2 belts with round top teeth that would compress over a smooth bearing, using toothed pulleys, as you suggest, would be better.
|
Re: Inside-H: Modified H-Bot drive June 04, 2016 04:57PM |
Registered: 8 years ago Posts: 5,232 |

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
|
Re: Inside-H: Modified H-Bot drive June 04, 2016 06:57PM |
Registered: 10 years ago Posts: 564 |
Quote
o_lampe
A bit OT, but for your "problem" a belt with herringbone teeth would be great. Don't know if these exist. Time to file a patent...again
Herringbone belts do exist, but I've never seen tiny ones. Actually, a metal band timing belt like this: http://www.belttechnologies.com/products/belt/drive-tape-belts/ would be ideal - much stiffer than fiberglass core belts, and easy to wrap around idler pulleys.
Sorry, only registered users may post in this forum.