2nd Build Ord Bot: Help ! Stepper Motor Problem 
Posted by Janski
|
2nd Build Ord Bot: Help ! Stepper Motor Problem June 04, 2014 07:41PM |
Registered: 10 years ago Posts: 96 |
Dear Rep Rappers,
I have ran into a weird issue.
Recently Completed : Ramps 1.4 Hardron Ord Bot. Fully functioning and steep learning curve.
Thinking that I have this in the bag, I went ahead and purchased parts for the 2nd one:
After Setup and Firmware upload: motors are not working properly! AHHH!!
I checked Pots: all set correctly at 0.80v. So there is power going to the motors. 12v power supply : 12.5v supplied.
Why do they move a step at a time? and if set for 100 mm it just makes weird noise.
This grinds my gears, because I would assume the same process goes for the same build. Could it be the manufacturer of the Arduino 2560/ramps 1.4?
Please advise if you have any experience with kipping motors
kipping motors
Sincerely,
Janski
I have ran into a weird issue.
Recently Completed : Ramps 1.4 Hardron Ord Bot. Fully functioning and steep learning curve.
Thinking that I have this in the bag, I went ahead and purchased parts for the 2nd one:
After Setup and Firmware upload: motors are not working properly! AHHH!!
I checked Pots: all set correctly at 0.80v. So there is power going to the motors. 12v power supply : 12.5v supplied.
Why do they move a step at a time? and if set for 100 mm it just makes weird noise.
This grinds my gears, because I would assume the same process goes for the same build. Could it be the manufacturer of the Arduino 2560/ramps 1.4?
Please advise if you have any experience with
kipping motors Sincerely,
Janski
|
Re: 2nd Build Ord Bot: Help ! Stepper Motor Problem June 04, 2014 07:42PM |
Registered: 10 years ago Posts: 96 |
|
Re: 2nd Build Ord Bot: Help ! Stepper Motor Problem June 05, 2014 04:45AM |
Registered: 14 years ago Posts: 1,092 |
Try slowing down the max acceleration and max speeds of the motors in Marlin (or whatever firmware you're using). The defaults in Marlin (and other firmware) are NOT necessarily suitable for all machines, so you need to tailor them to your machine/motors/etc. I would simply halve the values one at a time till you get reliable operation, then you can work your way higher toward the last value you had which didn't work. Eventually you'll find a stable value that works reliably.
|
Re: 2nd Build Ord Bot: Help ! Stepper Motor Problem June 05, 2014 04:46AM |
Registered: 14 years ago Posts: 1,092 |
|
Re: 2nd Build Ord Bot: Help ! Stepper Motor Problem June 06, 2014 07:30AM |
Registered: 10 years ago Posts: 96 |
|
Re: 2nd Build Ord Bot: Help ! Stepper Motor Problem June 06, 2014 07:35AM |
Registered: 10 years ago Posts: 96 |
|
Re: 2nd Build Ord Bot: Help ! Stepper Motor Problem June 06, 2014 09:21PM |
Registered: 10 years ago Posts: 96 |
|
Re: 2nd Build Ord Bot: Help ! Stepper Motor Problem June 07, 2014 09:38PM |
Registered: 14 years ago Posts: 1,092 |
It's not just based on the stepper motors, but the mechanical properties of the machine, and the operating voltage and current you're driving the motors with.
There is no hard and fast way to work this out purely with math, because there are a huge number of unknowns in the mechanical system.
eg: Do you know how much friction the bearings/bushings on your axes require you to overcome? What sort of drive mechanism are you using? If there's belts involved, which tooth type are you using, how much tension have you got in the belts. How good are the bearings in your motors? And that's just what I can come up with in my head without stopping to think about it.
There is no hard and fast way to work this out purely with math, because there are a huge number of unknowns in the mechanical system.
eg: Do you know how much friction the bearings/bushings on your axes require you to overcome? What sort of drive mechanism are you using? If there's belts involved, which tooth type are you using, how much tension have you got in the belts. How good are the bearings in your motors? And that's just what I can come up with in my head without stopping to think about it.
|
Re: 2nd Build Ord Bot: Help ! Stepper Motor Problem June 08, 2014 01:14AM |
Registered: 10 years ago Posts: 96 |
My motors are Nema 17 /1.8 deg/ 2.5 belts
How about default set steps per unit in marlin? Mine is set for 78.7402 for x and y axes. On the first build the units worked but on this particular one when i leave it at 78.7402 the motors make the noise and do not make a revolution. When i 1/2 that at set at 39.... For x and y , it starts to look more like proper revolution.
I am using the same belts and motors as i did on first build.
So do i keep on trial and error untill the movement is correct as you mention above?
How about default set steps per unit in marlin? Mine is set for 78.7402 for x and y axes. On the first build the units worked but on this particular one when i leave it at 78.7402 the motors make the noise and do not make a revolution. When i 1/2 that at set at 39.... For x and y , it starts to look more like proper revolution.
I am using the same belts and motors as i did on first build.
So do i keep on trial and error untill the movement is correct as you mention above?
|
Re: 2nd Build Ord Bot: Help ! Stepper Motor Problem June 08, 2014 01:17AM |
Registered: 10 years ago Posts: 96 |
|
Re: 2nd Build Ord Bot: Help ! Stepper Motor Problem June 08, 2014 01:33AM |
Registered: 14 years ago Posts: 1,092 |
What stepper drivers are you using? A498x or DRV882x drivers? The specific driver chips require different jumper settings for each specific microstepping mode, which are specific to the actual stepper chip.
Are the stepper drivers set for 1/16th microsteps (this is what the jumper settings are for? Those numbers in Marlin are fairly specific for fairly standard setups for drivers set up for 1/16th microstep. They will be different if you're using 1/8th microstep or 1/32nd microstep jumper setting for your drivers.
eg: A4983 and A4988 drivers support a max of 1/16th microsteps. DRV8825's support a max of 1/32nd microsteps. The jumper settings for A4983/A4988 at 1/16th boards are the same as those used for DRV8825's at 1/32nd microsteps.
Are the stepper drivers set for 1/16th microsteps (this is what the jumper settings are for? Those numbers in Marlin are fairly specific for fairly standard setups for drivers set up for 1/16th microstep. They will be different if you're using 1/8th microstep or 1/32nd microstep jumper setting for your drivers.
eg: A4983 and A4988 drivers support a max of 1/16th microsteps. DRV8825's support a max of 1/32nd microsteps. The jumper settings for A4983/A4988 at 1/16th boards are the same as those used for DRV8825's at 1/32nd microsteps.
|
Re: 2nd Build Ord Bot: Help ! Stepper Motor Problem June 08, 2014 02:34PM |
Registered: 10 years ago Posts: 96 |
Dear Cefiar,
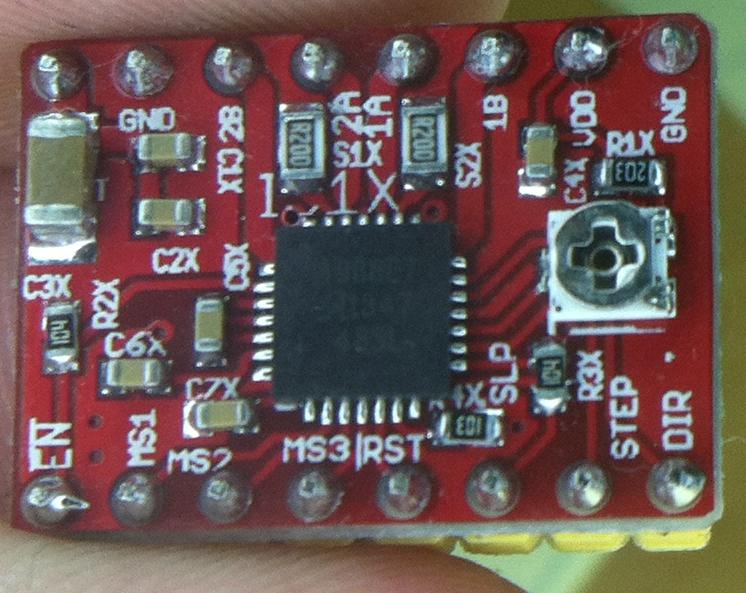
attached is the pic of the driver:
The board came with the A4988 drivers: ( 4988ET, A1347, 485L on the microprocessor ).. - assuming it is the 1/16 then.
Belt used: MXL Timing Belts – .080" or 2.03 mm Pitch
The motors I am using are Nema 17: KL17H248-15-4A Lot No. 2013.04.19
As per my current understanding : the stepper motor does 360degree / turn. There are 200 steps . 360/200 = 1.8 degrees per step. the Pulley Gear Has 20 Teeth on X and Y . The MXL belts are spaced at 3mm using digi tape ( measuring the distance of "beginning of one tooth - across the gap - end of next tooth")
Thank you for taking your time to help me understand all of this
- Janski
Edited 2 time(s). Last edit at 06/08/2014 03:11PM by Janski.
attached is the pic of the driver:
The board came with the A4988 drivers: ( 4988ET, A1347, 485L on the microprocessor ).. - assuming it is the 1/16 then.
Belt used: MXL Timing Belts – .080" or 2.03 mm Pitch
The motors I am using are Nema 17: KL17H248-15-4A Lot No. 2013.04.19
As per my current understanding : the stepper motor does 360degree / turn. There are 200 steps . 360/200 = 1.8 degrees per step. the Pulley Gear Has 20 Teeth on X and Y . The MXL belts are spaced at 3mm using digi tape ( measuring the distance of "beginning of one tooth - across the gap - end of next tooth")
Thank you for taking your time to help me understand all of this
- Janski
Edited 2 time(s). Last edit at 06/08/2014 03:11PM by Janski.
{kind=link}
{kind=link}
|
Re: 2nd Build Ord Bot: Help ! Stepper Motor Problem June 08, 2014 02:41PM |
Registered: 10 years ago Posts: 96 |
Quote
Cefiar
Are the stepper drivers set for 1/16th microsteps (this is what the jumper settings are for? Those numbers in Marlin are fairly specific for fairly standard setups for drivers set up for 1/16th microstep. They will be different if you're using 1/8th microstep or 1/32nd microstep jumper setting for your drivers.
.
That is what I am having hard time understanding: By "drivers set for 1/16th microsteps". Is this done in Marlin? if so is it the configuration.h -#define DEFAULT_AXIS_STEPS_PER_UNIT {78.7402,78.7402,2560.68,106.707}
When I change the x and y values lower than the above, the motors seem to start working. But i just do not understand where the 78.7402 comes from?
Edited 1 time(s). Last edit at 06/08/2014 03:06PM by Janski.
|
Re: 2nd Build Ord Bot: Help ! Stepper Motor Problem June 08, 2014 11:34PM |
Registered: 14 years ago Posts: 1,092 |
It's a math calculation to get those steps/mm. You can usually work this out from the pitch of the threads, number of teeth, etc.
Those values are really "microsteps/mm" in most setups, as a single step pulse only advances the driver a single microstep (according to how many microsteps you've got configured using the jumpers - if that's full steps, then each pulse will be a full step).
So this means for a 1.8 degree motor (200 steps per revolution), you multiply that number by 16 if you're using 1/16th mcirostepping on the drivers, to get a full revolution. That means the board needs to send 3200 pulses to do a full revolution.
To take into account belts (usually for X & Y axes on a standard Prusa for example) or thread pitch (usually for Z on a standard Prusa) you need to calculate the effect they have on your steps (convert revolutions into distances, using whatever ratio the mechanism they use produces).
There's a calculator for these sorts of things here: [calculator.josefprusa.cz]
Those values are really "microsteps/mm" in most setups, as a single step pulse only advances the driver a single microstep (according to how many microsteps you've got configured using the jumpers - if that's full steps, then each pulse will be a full step).
So this means for a 1.8 degree motor (200 steps per revolution), you multiply that number by 16 if you're using 1/16th mcirostepping on the drivers, to get a full revolution. That means the board needs to send 3200 pulses to do a full revolution.
To take into account belts (usually for X & Y axes on a standard Prusa for example) or thread pitch (usually for Z on a standard Prusa) you need to calculate the effect they have on your steps (convert revolutions into distances, using whatever ratio the mechanism they use produces).
There's a calculator for these sorts of things here: [calculator.josefprusa.cz]
|
Re: 2nd Build Ord Bot: Help ! Stepper Motor Problem June 09, 2014 05:20AM |
Registered: 10 years ago Posts: 69 |
[www.daycounter.com]
The link above will allow you to calculate precisely, the highest speed that the motor is capable of (and speeds higher than this will see problems occur). The actual maximum will be limited by physical properties (and contrary to the posts earlier) can be calculated precisley, based on mass measurements and then following it up with basic acceleration calculations (a chap called Issac Newton discovered certain laws that hold true today for the calculation of these properties) based on the torque moment of the stepper and the pulley wheel that drives the belt
The link above will allow you to calculate precisely, the highest speed that the motor is capable of (and speeds higher than this will see problems occur). The actual maximum will be limited by physical properties (and contrary to the posts earlier) can be calculated precisley, based on mass measurements and then following it up with basic acceleration calculations (a chap called Issac Newton discovered certain laws that hold true today for the calculation of these properties) based on the torque moment of the stepper and the pulley wheel that drives the belt
|
Re: 2nd Build Ord Bot: Help ! Stepper Motor Problem June 09, 2014 05:30AM |
Registered: 10 years ago Posts: 69 |
Steps per unit is the number of steps required for 1 unit (mm) of motion, for common belt movement, no steps per revolution / (pulley diameter * pi) wil give this figure. If you're full stepping with a 200 step motor, using an 18mm pulley:
200 / (18mm * pi)
200 / 56.5487mm
= 3.53
If you're microstepping at 16 micro-steps per step, then multiply the number of steps in your stepper by the number of microsteps, and feed that into the equation:
3200 / 56.5487 = 56.588 steps/mm (steps/unit)
200 / (18mm * pi)
200 / 56.5487mm
= 3.53
If you're microstepping at 16 micro-steps per step, then multiply the number of steps in your stepper by the number of microsteps, and feed that into the equation:
3200 / 56.5487 = 56.588 steps/mm (steps/unit)
Sorry, only registered users may post in this forum.