Magnetic joints and selfassembling ...
Posted by VDX
|
Magnetic joints and selfassembling ... September 22, 2007 03:11PM |
Admin Registered: 16 years ago Posts: 13,888 |
... hi folks,
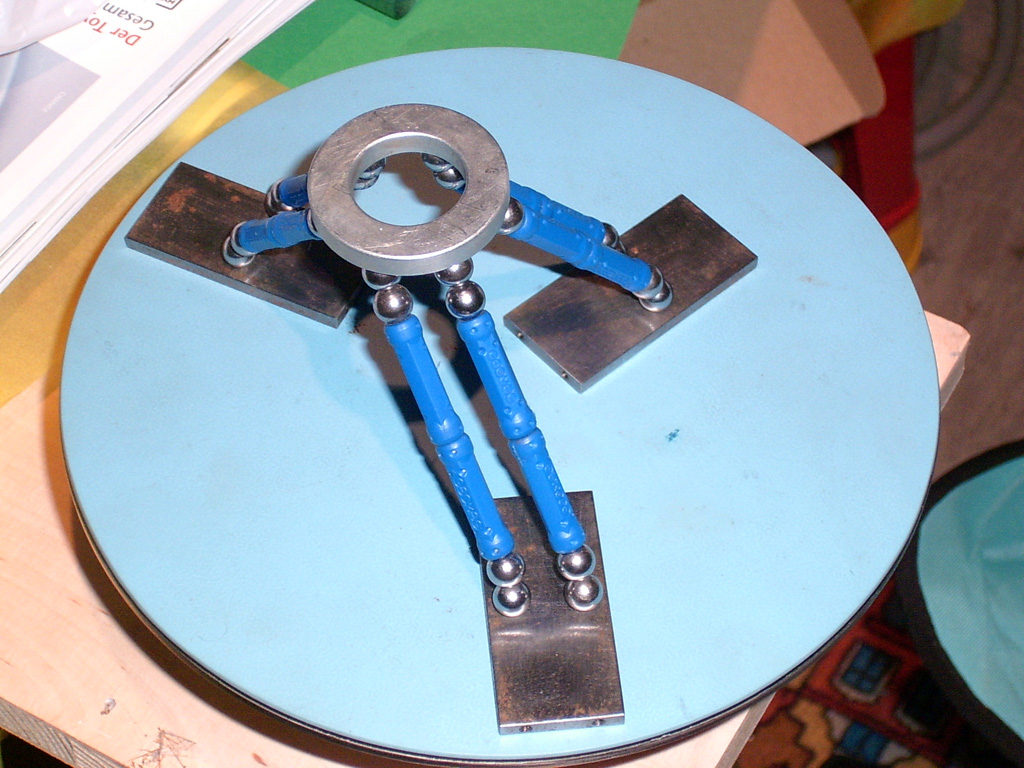
i sort of invented a self-assembling-mechanism for macroscopic joint-structures and flexure hinges, as known in flex-joint parallel kinematics.
In the image below you can see a tripod-sample with this joints, i 'assembled on the fly' in two minutes - if i set it on three linear drives, then the fully functionable tripod-system for reprap-dispensing or micro-tooling is ready
The rods are magnets from a toy-mag-box of my children, but the balls are not from steel, but spherically shaped neodym-magnets ( [www.supermagnete.de] , ~50 cents).
With the stacking of mechanic-parts with spherical magnets or perpendicular magnetised rods i can easily build highly precise, stiff and stip'n-slick-free joints and flexure hinges, which are nearly fail-resistant (if they rip apart, i only have to reassemble them again ...)
My actual interest goes in parallel kinematics, but maybe this method is useful in joining and (self-) fixing of other structures too?
Bye, Viktor
Edited 1 time(s). Last edit at 09/22/2007 03:15PM by Viktor Dirks.
i sort of invented a self-assembling-mechanism for macroscopic joint-structures and flexure hinges, as known in flex-joint parallel kinematics.
In the image below you can see a tripod-sample with this joints, i 'assembled on the fly' in two minutes - if i set it on three linear drives, then the fully functionable tripod-system for reprap-dispensing or micro-tooling is ready
The rods are magnets from a toy-mag-box of my children, but the balls are not from steel, but spherically shaped neodym-magnets ( [www.supermagnete.de] , ~50 cents).
With the stacking of mechanic-parts with spherical magnets or perpendicular magnetised rods i can easily build highly precise, stiff and stip'n-slick-free joints and flexure hinges, which are nearly fail-resistant (if they rip apart, i only have to reassemble them again ...)
My actual interest goes in parallel kinematics, but maybe this method is useful in joining and (self-) fixing of other structures too?
Bye, Viktor
Edited 1 time(s). Last edit at 09/22/2007 03:15PM by Viktor Dirks.
{kind=link}
{kind=link}
|
Re: Magnetic joints and selfassembling ... September 22, 2007 06:59PM |
Admin Registered: 17 years ago Posts: 1,487 |
|
Re: Magnetic joints and selfassembling ... September 23, 2007 03:31PM |
Admin Registered: 16 years ago Posts: 13,888 |
Hi Zach,
here [www.pp.bme.hu] you have an example of hexapods and tripods for CNC-systems with some basics and formula for converting ...
I think, with an easy to assemble (because of magnetic selfassembly) and reliable mechanic for a 3-axis-system we can go deeper in the development of the software, which is free of charge then.
With 3 linear stepper-drives and controller-modules from nanotec and all the parts for building a feasible tripod-reprap i estimate a price of 500 Euros for the complete kit - how much for the 'cartesian reprap' with the many parts for fixing and feeding?
If i get the software working, for converting STL-data into tripod-movement, then i have my nano-reprap ready to use in two or three weekend-sessions!
Then i can go in developing of the toolheads and image-recognition for some of my other problems ...
Maybe you are interested in stereoscopic systems, which are based on cheap web-cams, have an excellent depht-field (nearly ten times more then normal) and receive 3D-stereo with only one camera and vizualize it in a live-video-stream?
Here is a link to samples, which are made with my optics: [www.mikroskopkamera.de]
And here direct to the first image-gallery (all images are live-snapshots without optimisation or computational stacking!):
[www.mikroskopkamera.de]
Ciao, Viktor
here [www.pp.bme.hu] you have an example of hexapods and tripods for CNC-systems with some basics and formula for converting ...
I think, with an easy to assemble (because of magnetic selfassembly) and reliable mechanic for a 3-axis-system we can go deeper in the development of the software, which is free of charge then.
With 3 linear stepper-drives and controller-modules from nanotec and all the parts for building a feasible tripod-reprap i estimate a price of 500 Euros for the complete kit - how much for the 'cartesian reprap' with the many parts for fixing and feeding?
If i get the software working, for converting STL-data into tripod-movement, then i have my nano-reprap ready to use in two or three weekend-sessions!
Then i can go in developing of the toolheads and image-recognition for some of my other problems ...
Maybe you are interested in stereoscopic systems, which are based on cheap web-cams, have an excellent depht-field (nearly ten times more then normal) and receive 3D-stereo with only one camera and vizualize it in a live-video-stream?
Here is a link to samples, which are made with my optics: [www.mikroskopkamera.de]
And here direct to the first image-gallery (all images are live-snapshots without optimisation or computational stacking!):
[www.mikroskopkamera.de]
Ciao, Viktor
|
Re: Magnetic joints and selfassembling ... September 23, 2007 06:29PM |
Registered: 16 years ago Posts: 20 |
|
Re: Magnetic joints and selfassembling ... September 24, 2007 01:17AM |
Admin Registered: 16 years ago Posts: 13,888 |
Hi lordcat,
look at the image 'Tripod-2.jpg' ( [forums.reprap.org] ) at [forums.reprap.org]
Here you have a reprapable 'one-sheet' body, which contains all the mechanical stability, the flexure hinges and the feeding.
You need only the linear drives and the tool-head ...
Until the reprap is capable of printing the hinges (minimum 0,1 micron accuracy), i have to glue thin pieces of superelastic nitinol or springy steelfoil as hinges, or i apply the spherical magnets, what is much easier ...
I must buy the motors either, so why not 12$ more for the magnets?
The stiffnes of the tripod-rods i can guarantee with inserted and overmolded sticks, so the only actually not reprable parts are the motors, the electronic and the connectors ...
Ciao, Viktor
Edited 1 time(s). Last edit at 09/24/2007 01:18AM by Viktor Dirks.
look at the image 'Tripod-2.jpg' ( [forums.reprap.org] ) at [forums.reprap.org]
Here you have a reprapable 'one-sheet' body, which contains all the mechanical stability, the flexure hinges and the feeding.
You need only the linear drives and the tool-head ...
Until the reprap is capable of printing the hinges (minimum 0,1 micron accuracy), i have to glue thin pieces of superelastic nitinol or springy steelfoil as hinges, or i apply the spherical magnets, what is much easier ...
I must buy the motors either, so why not 12$ more for the magnets?
The stiffnes of the tripod-rods i can guarantee with inserted and overmolded sticks, so the only actually not reprable parts are the motors, the electronic and the connectors ...
Ciao, Viktor
Edited 1 time(s). Last edit at 09/24/2007 01:18AM by Viktor Dirks.
|
Re: Magnetic joints and selfassembling ... November 20, 2007 12:42AM |
Registered: 16 years ago Posts: 182 |
|
Re: Magnetic joints and selfassembling ... November 20, 2007 01:35AM |
Admin Registered: 16 years ago Posts: 13,888 |
Hi RoundSparrow,
... with the Tripod i'll try to develop a sort of easy to assemble 'micro-reprap' with much higher accuracy, as achievable with a FDM-extruder.
With the magnetic joints and the parallel kinematics i only need three linear drives as showed in my setup, six rods, two plates for fixing the drives and a third plate for the toolhead (plus some screws and glue for fixing)
As the size is scalable up and down freely, i can design a much smaller setup (and a very big one for buildung furniture or so too ), so it's possible too to make a sort of 'Tripod-toolhead', which sits as tool in my cartesian 3D-cnc-mill ...
My primary goal is to make very small and accurate parts from pastes i mix from glass- or ceramic-powder (and other materials too) with different fluids.
In my first experiments with glass- or gold-powder in dexpanthenol+water i extrude/dispense much smaller trays and dropplets as possible with the FDM-head - i achieved trays with 0,1 mm width and single droplets of maybe 50 microns with a syringe and nearly 20 microns with a dip-pen-dispenser.
By heating the paste with a diode-laser i dried the solvent away and then melted the powder to solid.
With the gold-paste i managed fixing and contacting of 1-micron-diameter platinum-wires on goldpads for a very precise gas-temp-sensor.
With the glass-paste (and later some ceramic-pastes) i want to fab the body of sensors - when i can in the same process (but with two syringes filled with ceramic- and gold-paste and a diode-laser-head for sintering) build the rigid sensor-body and interlayer gold-wires and vias, then it's running right
***
In another developing-path i'll insert only the diode-laser in the head and layer (or roll as in a lathe-setup) many plastic-sheets on the basis-plate (or -axis), where i cut sheetwise the contours and separating-lines - so with glue-stacking all the sheets to a solid block i'll have a LOM-body (LOM=Laminated Object Modelling/Manufacturing) with the inlaying 3D-object(s) - i only have to brake the outer volume off to 'free' the objects
The LOM-approach is very much faster then normal extruding, as i only have to process the outlines and some separating lines, not every point of the 3D-object ...
***
And a third possible path is the inserting of a normal ink-jet-printhead and either print with a glue-solvent on a powder-surface as in Z-corp 3D-printers, or only print the contours and separating lines (as in the LOM) with salt-water and heat the powder-surface until it melts, so i'll have a solidified and more rigid body, as in powder-glueing ...
Viktor
Edited 1 time(s). Last edit at 11/20/2007 01:39AM by Viktor Dirks.
... with the Tripod i'll try to develop a sort of easy to assemble 'micro-reprap' with much higher accuracy, as achievable with a FDM-extruder.
With the magnetic joints and the parallel kinematics i only need three linear drives as showed in my setup, six rods, two plates for fixing the drives and a third plate for the toolhead (plus some screws and glue for fixing)
As the size is scalable up and down freely, i can design a much smaller setup (and a very big one for buildung furniture or so too
), so it's possible too to make a sort of 'Tripod-toolhead', which sits as tool in my cartesian 3D-cnc-mill ...My primary goal is to make very small and accurate parts from pastes i mix from glass- or ceramic-powder (and other materials too) with different fluids.
In my first experiments with glass- or gold-powder in dexpanthenol+water i extrude/dispense much smaller trays and dropplets as possible with the FDM-head - i achieved trays with 0,1 mm width and single droplets of maybe 50 microns with a syringe and nearly 20 microns with a dip-pen-dispenser.
By heating the paste with a diode-laser i dried the solvent away and then melted the powder to solid.
With the gold-paste i managed fixing and contacting of 1-micron-diameter platinum-wires on goldpads for a very precise gas-temp-sensor.
With the glass-paste (and later some ceramic-pastes) i want to fab the body of sensors - when i can in the same process (but with two syringes filled with ceramic- and gold-paste and a diode-laser-head for sintering) build the rigid sensor-body and interlayer gold-wires and vias, then it's running right
***
In another developing-path i'll insert only the diode-laser in the head and layer (or roll as in a lathe-setup) many plastic-sheets on the basis-plate (or -axis), where i cut sheetwise the contours and separating-lines - so with glue-stacking all the sheets to a solid block i'll have a LOM-body (LOM=Laminated Object Modelling/Manufacturing) with the inlaying 3D-object(s) - i only have to brake the outer volume off to 'free' the objects
The LOM-approach is very much faster then normal extruding, as i only have to process the outlines and some separating lines, not every point of the 3D-object ...
***
And a third possible path is the inserting of a normal ink-jet-printhead and either print with a glue-solvent on a powder-surface as in Z-corp 3D-printers, or only print the contours and separating lines (as in the LOM) with salt-water and heat the powder-surface until it melts, so i'll have a solidified and more rigid body, as in powder-glueing ...
Viktor
Edited 1 time(s). Last edit at 11/20/2007 01:39AM by Viktor Dirks.
Sorry, only registered users may post in this forum.