Mendel reprap motorized platform + reduced Rostock delta arms = better?
Posted by mofosyne
|
Mendel reprap motorized platform + reduced Rostock delta arms = better? May 28, 2012 12:07PM |
Registered: 11 years ago Posts: 24 |
I had a look at rostock delta robot, and I like how fast and stable it appeared to me: [www.youtube.com]
I also had a look at the design of the mendel reprap, and liked the idea of a motorized platform to reduce probe shake.
The problem I can see with rostock delta robot, is the platform size appears small, and making the platform bigger would require the arms to grow even larger.
While I can't totally imagine a perfect solution to this problem, I can imagine a partial solution.
Why not remove an arm from rostock delta robot, and simply have the extruder move from the z and x direction. Just leave the y direction for the motorized platform, mendel style. This would allow us to making longer printed object, length wise.
The advantage of this method if implemented in the 'next real reprap' after mendel, is that the arms holding the extruders would be symmetrical.(Much like the rostock delta robot). This would help in building, printing, repairs, of the 3d printer as you don't have to stock as much. (Also the source model files would be smaller due to repeated mirrored parts.)
Edited 1 time(s). Last edit at 05/28/2012 12:08PM by mofosyne.
I also had a look at the design of the mendel reprap, and liked the idea of a motorized platform to reduce probe shake.
The problem I can see with rostock delta robot, is the platform size appears small, and making the platform bigger would require the arms to grow even larger.
While I can't totally imagine a perfect solution to this problem, I can imagine a partial solution.
Why not remove an arm from rostock delta robot, and simply have the extruder move from the z and x direction. Just leave the y direction for the motorized platform, mendel style. This would allow us to making longer printed object, length wise.
The advantage of this method if implemented in the 'next real reprap' after mendel, is that the arms holding the extruders would be symmetrical.(Much like the rostock delta robot). This would help in building, printing, repairs, of the 3d printer as you don't have to stock as much. (Also the source model files would be smaller due to repeated mirrored parts.)
Edited 1 time(s). Last edit at 05/28/2012 12:08PM by mofosyne.
|
Re: Mendel reprap motorized platform + reduced Rostock delta arms = better? May 28, 2012 10:12PM |
Registered: 11 years ago Posts: 24 |
Oh also I think this design would do well with a 'cable drive' instead of a timing belt. Easier to find such material.
E.g. FoamCore drive cables [web.mit.edu] . Very simple to do, and appears just as stable (not sure about speed of movement however).
Edited 1 time(s). Last edit at 05/28/2012 10:38PM by mofosyne.
E.g. FoamCore drive cables [web.mit.edu] . Very simple to do, and appears just as stable (not sure about speed of movement however).
Edited 1 time(s). Last edit at 05/28/2012 10:38PM by mofosyne.
|
Re: Mendel reprap motorized platform + reduced Rostock delta arms = better? May 29, 2012 10:16AM |
Registered: 11 years ago Posts: 24 |
Okay I decided to quickly sketch my concept out.
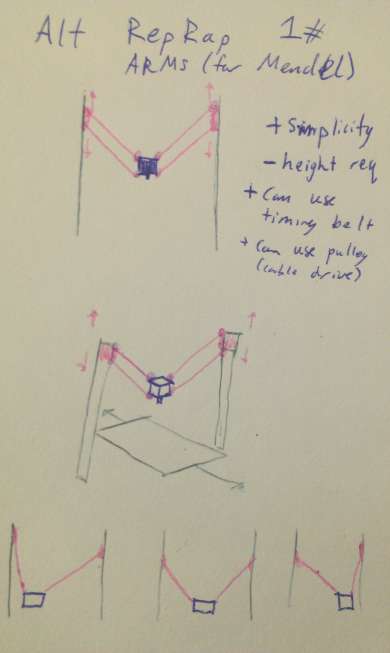
First image: simplifed rostock delta style
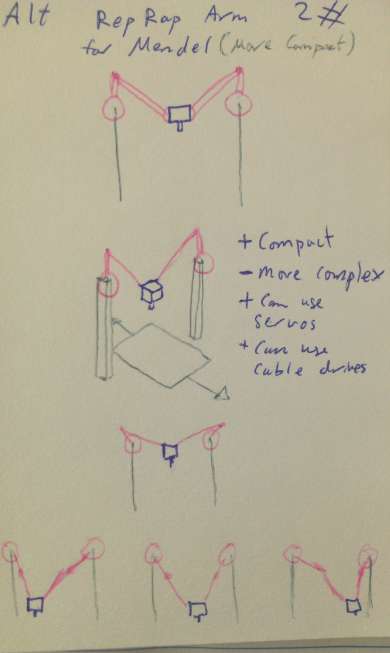
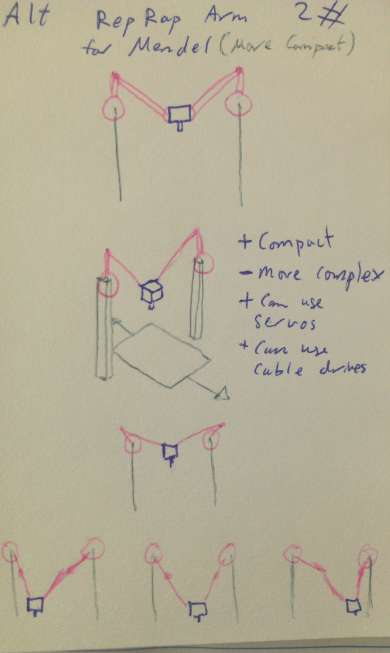
Second image: simplified traditional delta arm, but inverted (just thought of it today)
Personally I like the first image, as it has the most similarity with the original mendel, and it would be easier to modify existing mendel design to use this instead.
However I can imagine the second image having its own advantage, as you can easily drop in servo-motors to control the angle of each arm. The second image also has the advantage of consisting of 'printable gears', meaning timing belts is not required.
In dot points:
First image:
+ Simplicity: its just two stepper motor moving two pivot mount up and down
+ Stability: as it only has two arms, less joints to shake
- Portablity: Has to be tall to allow for arm clearance. (maybe you can add handle bars to it?)
Second image:
+Compact: this one is not as tall compaired to first idea, so is more portable
+Can potentially use servos: More control over angle.
- Complexity: Has more part counts, and is potentially less accurate compaired to First idea.
Have you guys also considered using "fishing wires" instead of timing belts? It seems it can be done, as there is a person who created the Tantillus that uses cable instead of rubber belts, for cost saving measures, and apparenly it works pretty well. I wonder if performance can be improved with a double pulley.
From tantillus [reprap.org] : "Uses an interesting drive train: low cost wire rope (fishing wire) or High test Braided fishing line instead of costly belts (It wraps 5 times around the rod and then goes through a hole and wraps an additional 5 times resulting in no slip). This is a roll on roll off system with a fixed anchor in the middle."
Edited 1 time(s). Last edit at 05/30/2012 01:16AM by mofosyne.
First image: simplifed rostock delta style
Second image: simplified traditional delta arm, but inverted (just thought of it today)
Personally I like the first image, as it has the most similarity with the original mendel, and it would be easier to modify existing mendel design to use this instead.
However I can imagine the second image having its own advantage, as you can easily drop in servo-motors to control the angle of each arm. The second image also has the advantage of consisting of 'printable gears', meaning timing belts is not required.
In dot points:
First image:
+ Simplicity: its just two stepper motor moving two pivot mount up and down
+ Stability: as it only has two arms, less joints to shake
- Portablity: Has to be tall to allow for arm clearance. (maybe you can add handle bars to it?)
Second image:
+Compact: this one is not as tall compaired to first idea, so is more portable
+Can potentially use servos: More control over angle.
- Complexity: Has more part counts, and is potentially less accurate compaired to First idea.
Have you guys also considered using "fishing wires" instead of timing belts? It seems it can be done, as there is a person who created the Tantillus that uses cable instead of rubber belts, for cost saving measures, and apparenly it works pretty well. I wonder if performance can be improved with a double pulley.
From tantillus [reprap.org] : "Uses an interesting drive train: low cost wire rope (fishing wire) or High test Braided fishing line instead of costly belts (It wraps 5 times around the rod and then goes through a hole and wraps an additional 5 times resulting in no slip). This is a roll on roll off system with a fixed anchor in the middle."
Edited 1 time(s). Last edit at 05/30/2012 01:16AM by mofosyne.
|
Re: Mendel reprap motorized platform + reduced Rostock delta arms = better? May 30, 2012 08:15AM |
Registered: 15 years ago Posts: 376 |

|
Re: Mendel reprap motorized platform + reduced Rostock delta arms = better? May 30, 2012 08:50AM |
Registered: 11 years ago Posts: 24 |
I thought about that too, however I wonder if its really suitable for reprap, as it is quite big lengthwise, and a bit top heavy looking.
By the way, I think you can keep the 'extrusion probe' from twisting if you add extra arms 'parallel' to the original arms, but connected directly to the extruder instead. I can draw that out if you don't get what I mean. (don't worry about this idea if twisting of the tip is not an issue, but I would imagine it would make kinimatic calculations a bit harder)
So what do you think? (Checked the ideas above as well?)
Edited 2 time(s). Last edit at 05/30/2012 09:05AM by mofosyne.
By the way, I think you can keep the 'extrusion probe' from twisting if you add extra arms 'parallel' to the original arms, but connected directly to the extruder instead. I can draw that out if you don't get what I mean. (don't worry about this idea if twisting of the tip is not an issue, but I would imagine it would make kinimatic calculations a bit harder)
So what do you think? (Checked the ideas above as well?)
Edited 2 time(s). Last edit at 05/30/2012 09:05AM by mofosyne.
|
Re: Mendel reprap motorized platform + reduced Rostock delta arms = better? May 31, 2012 08:19AM |
Registered: 15 years ago Posts: 376 |
Yes the above design is a little wide (about 1metre), but I was thinking if you designed a cantilevered rising table (similar to ultimaker etc.) the machine could be wall mounted with no base plate. This would overcome some of the space limitations which would be present with a desktop machine.
An additional problem is that the x axes bars are long and prone to sagging in the middle. There are a few solutions to this.
1) split the rails so one delta arm is offset in z slightly and overlaps the bottom one in the middle. This setup is used in triglide robots (with three linear rails rather than two)
2) Use software compensation for the sag. I have seen this used on newer vertical boring machines.
3) Use a rail that is twisted slightly in the middle to compensate. This sounds a bit strange, but in early large vertical boring machines the rail was hand scraped to have a slight bump in the middle to compensate for the extra twist.
Here's a medium sized vertical boring machine.
An additional problem is that the x axes bars are long and prone to sagging in the middle. There are a few solutions to this.
1) split the rails so one delta arm is offset in z slightly and overlaps the bottom one in the middle. This setup is used in triglide robots (with three linear rails rather than two)
2) Use software compensation for the sag. I have seen this used on newer vertical boring machines.
3) Use a rail that is twisted slightly in the middle to compensate. This sounds a bit strange, but in early large vertical boring machines the rail was hand scraped to have a slight bump in the middle to compensate for the extra twist.
Here's a medium sized vertical boring machine.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
|
Re: Mendel reprap motorized platform + reduced Rostock delta arms = better? August 01, 2012 08:41AM |
Registered: 12 years ago Posts: 539 |
For me, part of the allure of the Rostock is the fact that the bed is stationary 
Your drawings are neat for sure. Will you be building this bot? I imagine it will need some fairly custom firmware.
I also like the 3D drawing of martinprice's bot. Neat to see you guys thinking outside the box
Your drawings are neat for sure. Will you be building this bot? I imagine it will need some fairly custom firmware.
I also like the 3D drawing of martinprice's bot. Neat to see you guys thinking outside the box
|
Re: Mendel reprap motorized platform + reduced Rostock delta arms = better? September 02, 2012 02:30AM |
Registered: 11 years ago Posts: 24 |
thanks Idolcrasher, at this stage I don't have the required skills to tackle this soon, but I like the idea of non-orthodox platforms (such as the rostock delta robots).
You make a good point about the benefit of a stationary platform. In that case I think Martinprice bot is a good idea. I got a few ideas to further extend his bot concept.
For martinprice wall mounted robot, I was worried about the stability of the arm "being extended forward". Well what if we replaced the metal rods with 'open beam' parts, I think that will help drastically improve stability.
Also martinprice bot can be made even more versitile, if we can modify the z axes mechanism to support a "forklift" like mechansm, so that the 3d printer can print objects that is larger than themselves. I think this would be a very important concept to explore, as if we want any future printer to be fully replicatable, it must be able to print entire printers of the same size as itself.
I think the last point of testing out the 'forklift' concept is the most interesting concept for me at least. Not sure how we can apply it to the delta form though.
Edited 1 time(s). Last edit at 09/02/2012 02:32AM by mofosyne.
You make a good point about the benefit of a stationary platform. In that case I think Martinprice bot is a good idea. I got a few ideas to further extend his bot concept.
For martinprice wall mounted robot, I was worried about the stability of the arm "being extended forward". Well what if we replaced the metal rods with 'open beam' parts, I think that will help drastically improve stability.
Also martinprice bot can be made even more versitile, if we can modify the z axes mechanism to support a "forklift" like mechansm, so that the 3d printer can print objects that is larger than themselves. I think this would be a very important concept to explore, as if we want any future printer to be fully replicatable, it must be able to print entire printers of the same size as itself.
I think the last point of testing out the 'forklift' concept is the most interesting concept for me at least. Not sure how we can apply it to the delta form though.
Edited 1 time(s). Last edit at 09/02/2012 02:32AM by mofosyne.
Sorry, only registered users may post in this forum.