Bigger Delta Rostock ?
Posted by penny2009
|
Bigger Delta Rostock ? August 18, 2012 06:03PM |
Registered: 12 years ago Posts: 26 |
|
Re: Bigger Delta Rostock ? August 19, 2012 02:14PM |
Registered: 11 years ago Posts: 369 |
|
Re: Bigger Delta Rostock ? August 23, 2012 11:37AM |
Registered: 11 years ago Posts: 24 |
|
Re: Bigger Delta Rostock ? August 23, 2012 03:25PM |
Admin Registered: 16 years ago Posts: 13,886 |
... the you'll need something like the ABB Flexpicker: [www.ics-robotics.co.uk]
Viktor
--------
Aufruf zum Projekt "Müll-freie Meere" - [reprap.org] -- Deutsche Facebook-Gruppe - [www.facebook.com]
Call for the project "garbage-free seas" - [reprap.org]
Viktor
--------
Aufruf zum Projekt "Müll-freie Meere" - [reprap.org] -- Deutsche Facebook-Gruppe - [www.facebook.com]
Call for the project "garbage-free seas" - [reprap.org]
|
Re: Bigger Delta Rostock ? August 24, 2012 10:32AM |
Registered: 15 years ago Posts: 401 |
You might need to use telescopic arms, like this one does [www.youtube.com]
|
Re: Bigger Delta Rostock ? August 24, 2012 06:30PM |
Registered: 11 years ago Posts: 253 |
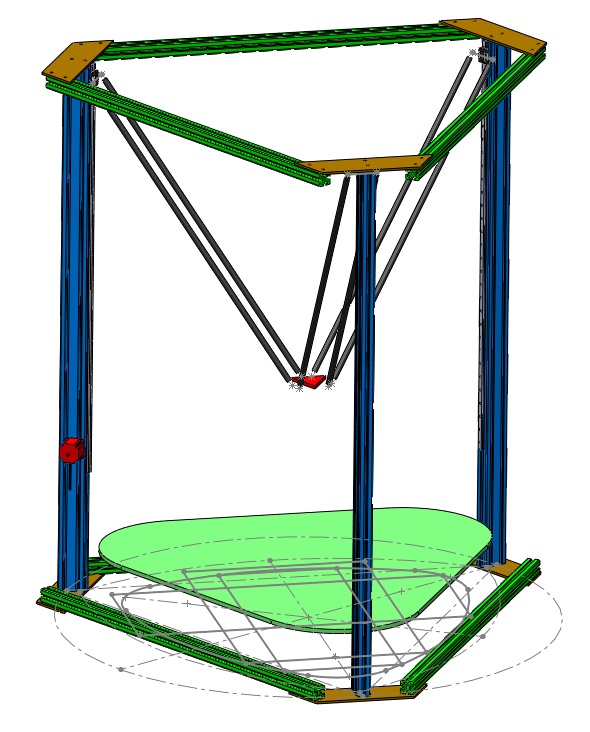
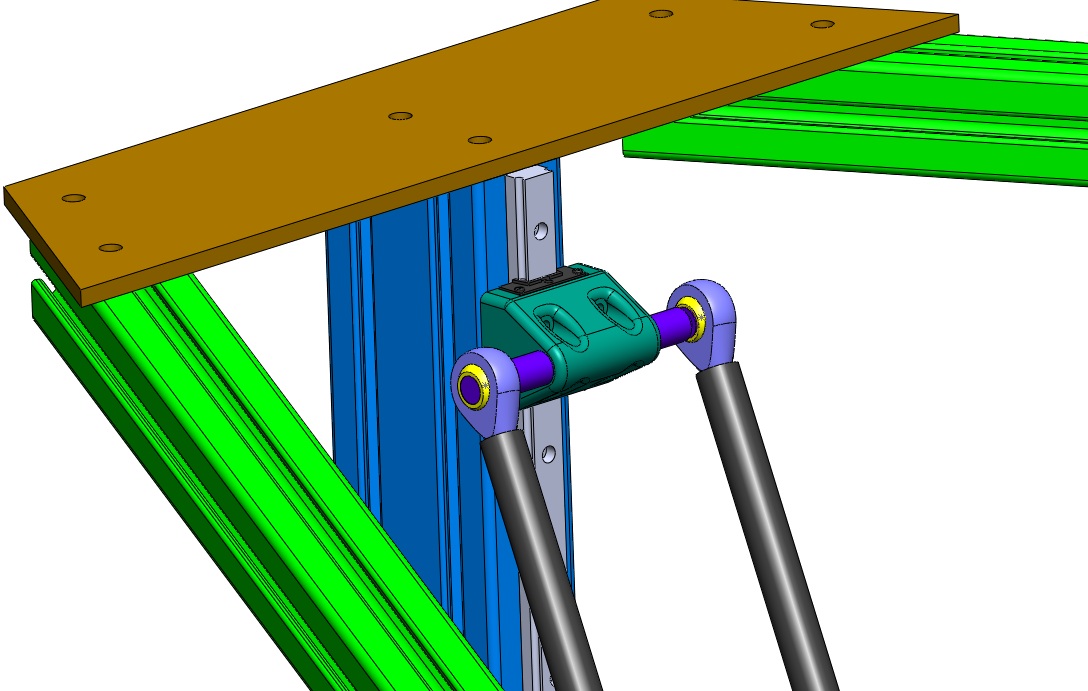
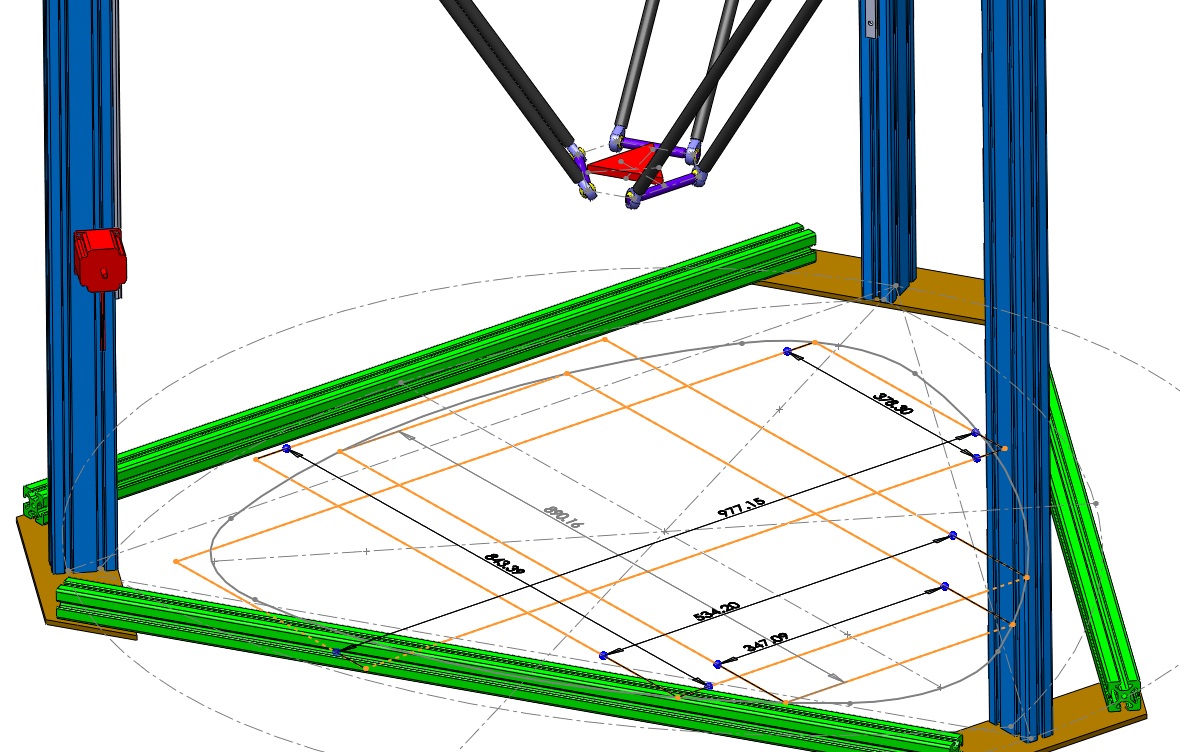
My vision for a SpideyBot is coming along nicely:
1.6m tall frame, easily enclosed for heated chamber, instead of HBP.
80/20 frame, 6X, 6mm, simple flat plates join it all together.
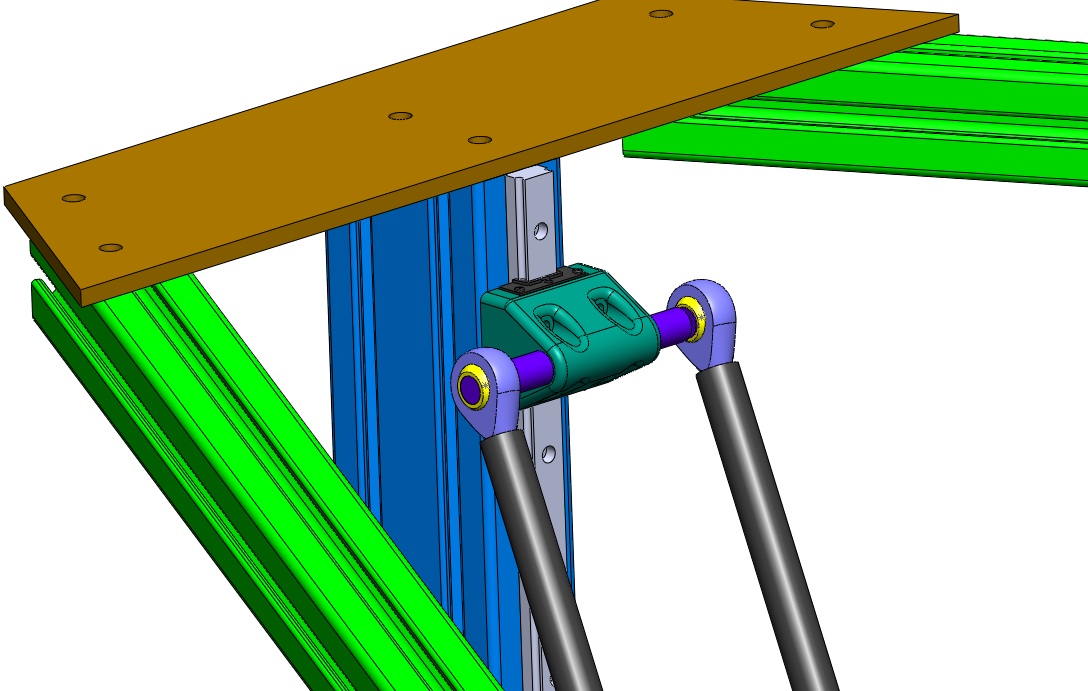
1.24m linear rail and block design, one per column. THK RSR15 size
NEMA23 steppers, belt drive
1m carbon fiber tubes, Goodwinds .6inch diameter
10mm rod ends from VXB
currently designing the head. considering a mechanism to raise/lower individual nozzles.
Bowden tube style or maybe NEMA 8, 16:1 reduction stepper (have two of them already)
Dave
1.6m tall frame, easily enclosed for heated chamber, instead of HBP.
80/20 frame, 6X, 6mm, simple flat plates join it all together.
1.24m linear rail and block design, one per column. THK RSR15 size
NEMA23 steppers, belt drive
1m carbon fiber tubes, Goodwinds .6inch diameter
10mm rod ends from VXB
currently designing the head. considering a mechanism to raise/lower individual nozzles.
Bowden tube style or maybe NEMA 8, 16:1 reduction stepper (have two of them already)
Dave
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
|
Re: Bigger Delta Rostock ? August 24, 2012 07:00PM |
Registered: 11 years ago Posts: 939 |
|
Re: Bigger Delta Rostock ? August 24, 2012 07:17PM |
Registered: 11 years ago Posts: 253 |
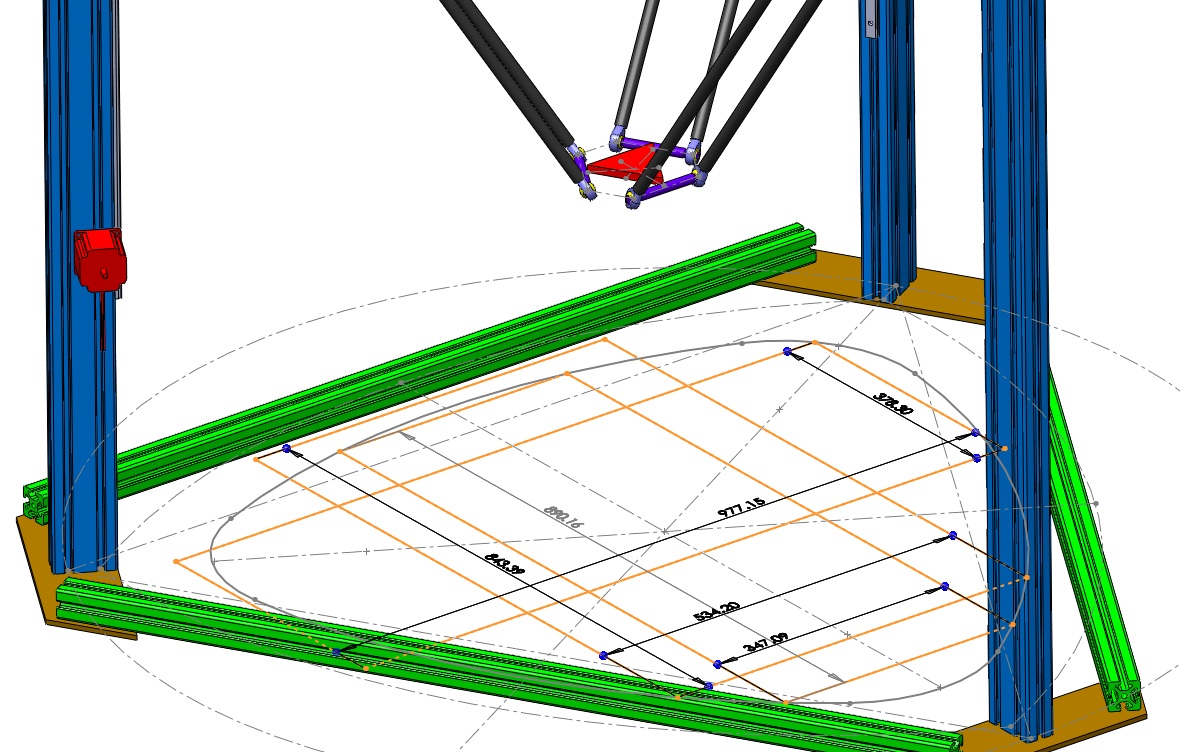
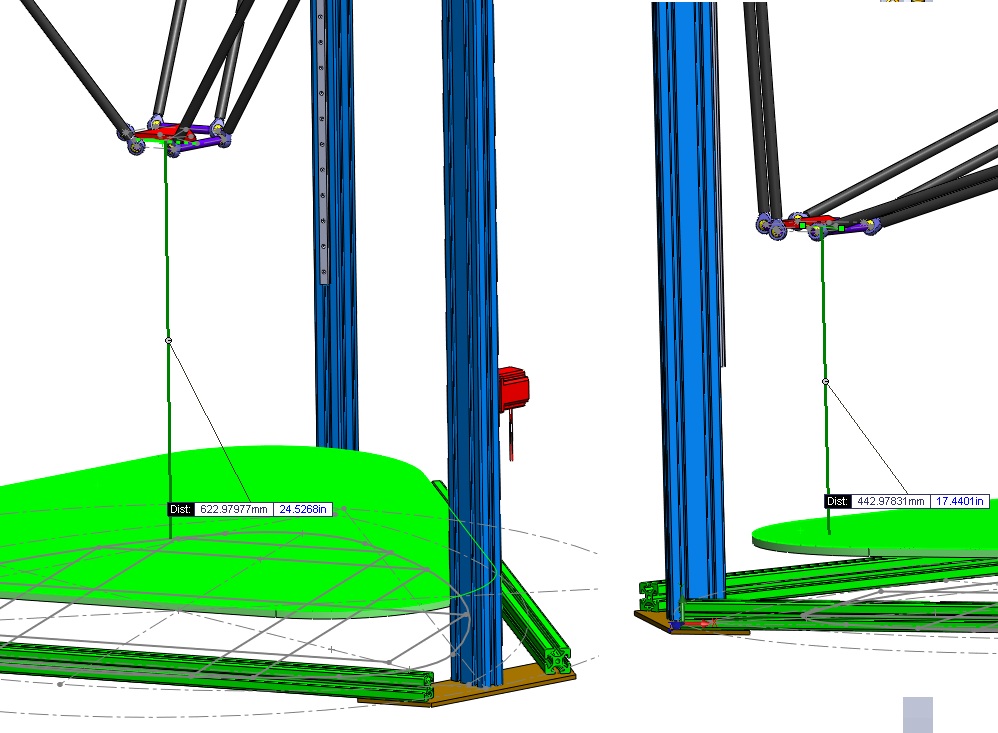
The working volume upper surface is a rounded triangular dome shape.
I have 17 inches at the three columns in an arm down situation, with 24 inches at the center.
The frame height of 1.6m gives some extra height.
Dave
(edited to remove poor tone)
Edited 1 time(s). Last edit at 08/24/2012 08:13PM by davew_tx.
I have 17 inches at the three columns in an arm down situation, with 24 inches at the center.
The frame height of 1.6m gives some extra height.
Dave
(edited to remove poor tone)
Edited 1 time(s). Last edit at 08/24/2012 08:13PM by davew_tx.
{kind=link}
{kind=link}
|
Re: Bigger Delta Rostock ? August 25, 2012 03:32PM |
Registered: 11 years ago Posts: 11 |
Annirak Wrote:
-------------------------------------------------------
> You might need to use telescopic arms, like this
> one does
> [www.youtube.com]
I wonder if something like that could be done with RP rack+pinions?
-------------------------------------------------------
> You might need to use telescopic arms, like this
> one does
> [www.youtube.com]
I wonder if something like that could be done with RP rack+pinions?
|
Re: Bigger Delta Rostock ? August 25, 2012 11:09PM |
Registered: 11 years ago Posts: 24 |
The precision of Rack and Pinion might be an issue.
I wonder if its possible to using linear actualtors to replace the arms, while also leaving in the stepper motors. Essentally the system will now have 6 motors instead of 3.
The 'extendable arms' can be either motorized, or pnumatic, but motorized seems cheaper. Something like [www.physikinstrumente.com]
Correct me if I'm wrong, but the properties of "linear actulators" is that they tend to be slower, and not as precise as 'stepper motor+ belts".
But it does mean that the printer is now more space efficient. I would imagine that the lower part of the platform would just have a stationary arm length, while printing on the very top would consist of purely 'arm length' movement.
Benifit of above idea. Not much changes needed to the design hopefully.
Problem with the above idea is, increase arm mass, and increase cost, and slower printing time.
-----
Second partial solution:
Make a secondary motorised platform to move like mendel 3d printer. Benifits: Not too hard to construct, and is able to build longer objects. Disadvantage: Not as stable, and loses printable width.
Edited 1 time(s). Last edit at 08/26/2012 01:24AM by mofosyne.
I wonder if its possible to using linear actualtors to replace the arms, while also leaving in the stepper motors. Essentally the system will now have 6 motors instead of 3.
The 'extendable arms' can be either motorized, or pnumatic, but motorized seems cheaper. Something like [www.physikinstrumente.com]
Correct me if I'm wrong, but the properties of "linear actulators" is that they tend to be slower, and not as precise as 'stepper motor+ belts".
But it does mean that the printer is now more space efficient. I would imagine that the lower part of the platform would just have a stationary arm length, while printing on the very top would consist of purely 'arm length' movement.
Benifit of above idea. Not much changes needed to the design hopefully.
Problem with the above idea is, increase arm mass, and increase cost, and slower printing time.
-----
Second partial solution:
Make a secondary motorised platform to move like mendel 3d printer. Benifits: Not too hard to construct, and is able to build longer objects. Disadvantage: Not as stable, and loses printable width.
Edited 1 time(s). Last edit at 08/26/2012 01:24AM by mofosyne.
|
Re: Bigger Delta Rostock ? August 29, 2012 03:42PM |
Registered: 11 years ago Posts: 11 |
|
Re: Bigger Delta Rostock ? August 29, 2012 07:48PM |
Registered: 11 years ago Posts: 253 |
@ Acumen:
For me, R&P, in a precision setup, would be expensive, and maybe noisy if running zero clearance or contact pressure to eliminate gear slop.
That would also put the stepper (heavy-ish for NEMA 23) on a moving member, which will possibly cause overruns at quick direction changes.
Running downhill, that stepper has to stop and oppose momentum and gravity.
I selected an XL belt, at 100" long for $14. Each pulley is $6. Done. $26 for 1200mm of motion control (not linearization).
I am not using a ton of belt tensions on my large gantry machine. It seems to move very precisely (by hand right now)
www.econobelts.com (not affiliated, but am a customer)
Dave
Edited 1 time(s). Last edit at 08/29/2012 08:14PM by davew_tx.
For me, R&P, in a precision setup, would be expensive, and maybe noisy if running zero clearance or contact pressure to eliminate gear slop.
That would also put the stepper (heavy-ish for NEMA 23) on a moving member, which will possibly cause overruns at quick direction changes.
Running downhill, that stepper has to stop and oppose momentum and gravity.
I selected an XL belt, at 100" long for $14. Each pulley is $6. Done. $26 for 1200mm of motion control (not linearization).
I am not using a ton of belt tensions on my large gantry machine. It seems to move very precisely (by hand right now)
www.econobelts.com (not affiliated, but am a customer)
Dave
Edited 1 time(s). Last edit at 08/29/2012 08:14PM by davew_tx.
|
Re: Bigger Delta Rostock ? August 30, 2012 08:09AM |
Registered: 15 years ago Posts: 376 |
You have a distinct advantage using rack and pinions in a delta robot.
One of the problems with R & P is backlash, but in a delta this is helped by gravity assisting you because the racks are near vertical.
I think that a delta with telescopic arms is a good idea. Perhaps you could use a pantograph setup or a sarrus linkage to avoid using linear rails.
One of the problems with R & P is backlash, but in a delta this is helped by gravity assisting you because the racks are near vertical.
I think that a delta with telescopic arms is a good idea. Perhaps you could use a pantograph setup or a sarrus linkage to avoid using linear rails.
|
Re: Bigger Delta Rostock ? August 30, 2012 08:56AM |
Registered: 11 years ago Posts: 253 |
So, the way I see it, there are two requirements for each tower axis. block drive and 5DoF linearization.
R&P gives drive, but no linearization.
linear rail/blocks have no drive but 5 DoF.
round rod and LM8UU bearings give no drive and only 4DoF each, so two are needed per column. to remove rotation.
(other ways to do it other than two)
If you could drive one of the Sarrus arms directly (geared down?) with the stepper, the sarrus could give BOTH linearization and motion control.
Each column would need 4 arms and a block, which are easy constructions, cheap materials.
I think precision of the construction and joint slop would be a large challenge, because slop is multiplied as you go towards the extruder tip.
This would need some programming to help with the block speed versus stepper rpm. i.e. as the arms near the full extension move the block very little for the same rpm. maybe just use the arms in the middle section and forget about this issue.
"Servobelt" is a cool concept, with a directly mounted stepper. fast but not cheap, at $20k per meter.
might be able to use 80/20 and friction blocks (UHMW) and a printed up block. [www.youtube.com]
R&P gives drive, but no linearization.
linear rail/blocks have no drive but 5 DoF.
round rod and LM8UU bearings give no drive and only 4DoF each, so two are needed per column. to remove rotation.
(other ways to do it other than two)
If you could drive one of the Sarrus arms directly (geared down?) with the stepper, the sarrus could give BOTH linearization and motion control.
Each column would need 4 arms and a block, which are easy constructions, cheap materials.
I think precision of the construction and joint slop would be a large challenge, because slop is multiplied as you go towards the extruder tip.
This would need some programming to help with the block speed versus stepper rpm. i.e. as the arms near the full extension move the block very little for the same rpm. maybe just use the arms in the middle section and forget about this issue.
"Servobelt" is a cool concept, with a directly mounted stepper. fast but not cheap, at $20k per meter.
might be able to use 80/20 and friction blocks (UHMW) and a printed up block. [www.youtube.com]
{kind=link}
{kind=link}
|
Re: Bigger Delta Rostock ? September 01, 2012 01:23PM |
Registered: 11 years ago Posts: 11 |
I was actually thinking about combining the R&P and telescoping arms designs. Rather than using fluid actuators, it would simply be a piston-type design with the rack as the inner cylinder, and the outer cylinder having a small cutout near the end for the pinion to contact the rack. This would both allow for the space-efficient design of the telescoping rods, while allowing use of a rack without a moving motor (technically the motor would move a little, but not as much as if it were part of a carriage).
Anyone see any major issues with this idea?
My printer isn't running yet, but I will definitely try to RP this later in the month.
Anyone see any major issues with this idea?
My printer isn't running yet, but I will definitely try to RP this later in the month.
|
Re: Bigger Delta Rostock ? September 07, 2012 05:12PM |
Registered: 15 years ago Posts: 401 |
Have you guys seen Lego's linear actuators? The design behind them is essentially R&P, but done as a worm drive instead. A single unit does linear bearing and linear actuator.
[technic.lego.com]
Lego actuators themselves wouldn't work for this, but the design might work. I don't know if it's covered by patents or not.
[technic.lego.com]
Lego actuators themselves wouldn't work for this, but the design might work. I don't know if it's covered by patents or not.
|
Re: Bigger Delta Rostock ? September 12, 2012 09:32AM |
Registered: 11 years ago Posts: 24 |
Acumen, It sounds rather interesting of a concept to have a telescopic arm design, especially with Annirak's link above on lego linear actuators. The biggest concerns I could think of, is 'accuracy' of the gearing (especially if you are printing these arms yourself), and also printing speed. Secondary concerns is, how 'far' can it contract and extend. If the telescopic arms can only move two times it's shortest length, then that still would make for an oversized printer heightwise.
If you do choose a telescopic arm design, see if you can transfer rotational force via 'bowden cables'. It means you can locate the strong stepper motor elsewhere and keep the extendable arms light ( Which might help with speed).
If you do choose a telescopic arm design, see if you can transfer rotational force via 'bowden cables'. It means you can locate the strong stepper motor elsewhere and keep the extendable arms light ( Which might help with speed).
Sorry, only registered users may post in this forum.