An Argument for A Tripod
Posted by Corwin
|
An Argument for A Tripod April 21, 2009 01:40AM |
Registered: 15 years ago Posts: 88 |
So some time ago, Viktor proposed the idea of a parallel kinematic tripod design in place of a cartesian frame. At the time it was interesting and showed a lot of promise, but never really went as far as a full one repstrap (as far as I know). Just the other day, a design made by Festo, the iFab, made its way onto the forums and net with a video showing the idea put into practice.
This gave me an idea. As with all my ideas, there is a >70% chance someone already though of it and posted on it, but I'm going to say it anyway.
Generally speaking, there is a limited advantage to a tripod system. It still takes 3 motors and 3 stages to do the positioning, and it still requires a healthy supply of vitamins, etc. etc. But it CAN be designed with a major advantage. If each of the three columns is IDENTICAL, hexagonal, and radially symmetrical, then a tripod system can expand production capability MUCH faster than a Darwin design (or any other cartesian, including the wedge).
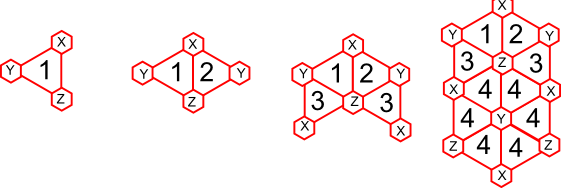
Darwin style systems reproduce, so the story goes, exponentially. 1 makes another, the 2 make 4, the 4 make 8. Your build capacity increases by at the rate of n^2.
A modular tripod has the potential to increase it's build capacity a lot faster thanks to the miracle of geometry. You start your machine the same way as a Darwin - 3 motors/stage, 1 build platform. You then build 1 stage and 1 build platform. You now have 2x the build capacity in 1/3 the time it would have taken to build an entirely new machine, because the new vertical stage can be placed opposite one of the existing stages and plugged into the same control signals.
So your first 1 makes another, the 2 go to four, then the 4 go to 10, the 10 go to 23.. and each generation takes 1/3 or less the time of a darwin, so you have construction capacity (solely for the purposes of making more tripod systems because they all have to make a copy of the same object, but that's alright) equal to 23 darwins in the time it takes a darwin to reproduce once.
The image attached shows growth through 4 generations. I chose 4 because this shows the point where build capacity begins growing faster than the number of new stepper-driven columns. The numbers in the triangles refer to that build space's generation, while the XYZ letters show which control signal the pillar would be hooked up to.
I am currently working on a rough design for a hexagonal stepper column that could work for this. Let me know what you think of the idea in general, and be sure to let me know if someone else mentioned it already.
This gave me an idea. As with all my ideas, there is a >70% chance someone already though of it and posted on it, but I'm going to say it anyway.
Generally speaking, there is a limited advantage to a tripod system. It still takes 3 motors and 3 stages to do the positioning, and it still requires a healthy supply of vitamins, etc. etc. But it CAN be designed with a major advantage. If each of the three columns is IDENTICAL, hexagonal, and radially symmetrical, then a tripod system can expand production capability MUCH faster than a Darwin design (or any other cartesian, including the wedge).
Darwin style systems reproduce, so the story goes, exponentially. 1 makes another, the 2 make 4, the 4 make 8. Your build capacity increases by at the rate of n^2.
A modular tripod has the potential to increase it's build capacity a lot faster thanks to the miracle of geometry. You start your machine the same way as a Darwin - 3 motors/stage, 1 build platform. You then build 1 stage and 1 build platform. You now have 2x the build capacity in 1/3 the time it would have taken to build an entirely new machine, because the new vertical stage can be placed opposite one of the existing stages and plugged into the same control signals.
So your first 1 makes another, the 2 go to four, then the 4 go to 10, the 10 go to 23.. and each generation takes 1/3 or less the time of a darwin, so you have construction capacity (solely for the purposes of making more tripod systems because they all have to make a copy of the same object, but that's alright) equal to 23 darwins in the time it takes a darwin to reproduce once.
The image attached shows growth through 4 generations. I chose 4 because this shows the point where build capacity begins growing faster than the number of new stepper-driven columns. The numbers in the triangles refer to that build space's generation, while the XYZ letters show which control signal the pillar would be hooked up to.
I am currently working on a rough design for a hexagonal stepper column that could work for this. Let me know what you think of the idea in general, and be sure to let me know if someone else mentioned it already.
|
Re: An Argument for A Tripod April 21, 2009 03:33AM |
Admin Registered: 16 years ago Posts: 13,888 |
Hi Corwin,
with the standard design it's practically impossible to crossover the borders of the triangular base - so you'll need three linear stages for every new triangle, not only one additive.
My idea behind the tripod-design was the lower count of parts and the 3-fold symmetry with identical parts what simplifies the assembly.
I'm stuck with the software - i first made some progress, then was searching cooperation for software-development, but it's not so easy and actually i somehow changed my focus and the tripod-project moved to the waiting list ...
Viktor
with the standard design it's practically impossible to crossover the borders of the triangular base - so you'll need three linear stages for every new triangle, not only one additive.
My idea behind the tripod-design was the lower count of parts and the 3-fold symmetry with identical parts what simplifies the assembly.
I'm stuck with the software - i first made some progress, then was searching cooperation for software-development, but it's not so easy and actually i somehow changed my focus and the tripod-project moved to the waiting list ...
Viktor
|
Re: An Argument for A Tripod April 21, 2009 05:15AM |
Admin Registered: 17 years ago Posts: 7,879 |
|
Re: An Argument for A Tripod April 21, 2009 11:08AM |
Registered: 16 years ago Posts: 49 |
|
Re: An Argument for A Tripod April 21, 2009 11:48AM |
Registered: 15 years ago Posts: 88 |
@Viktor: What is it about the traditional design that makes it difficult to cross over? I couldn't see anything in it when I was looking at the designs that seemed to inherently prevent it, but if I missed a major problem it wouldn't be the first time. If it's possible to even share 1 stage between 2 build platforms, in another configuration (ie just 2 triangles opposing each other), that still would improve replication time.
Btw, what kind of resolution do you need? I was planning to design it with NEMA 17s and 1/4-20 threaded rod assumed for the stages,
I know software is a sticking point for it, but I figured that if I could come up with a mechanical design and Festo could come up with software, it might just happen that the RepRap community could figure out software too XD
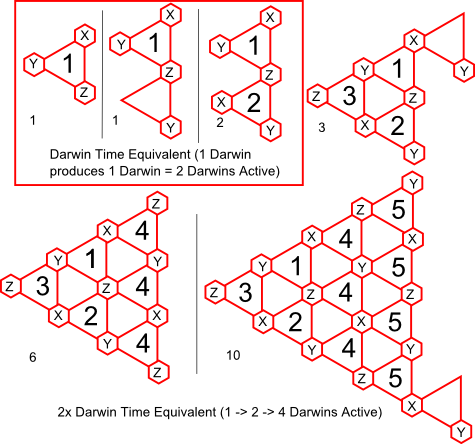
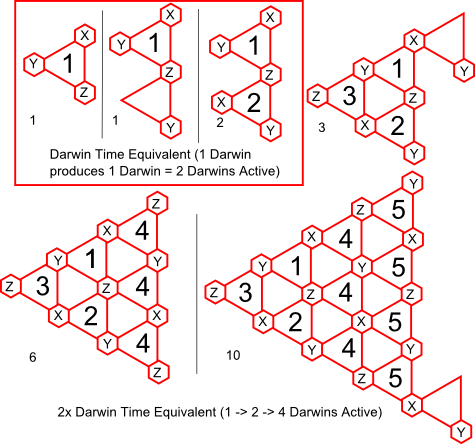
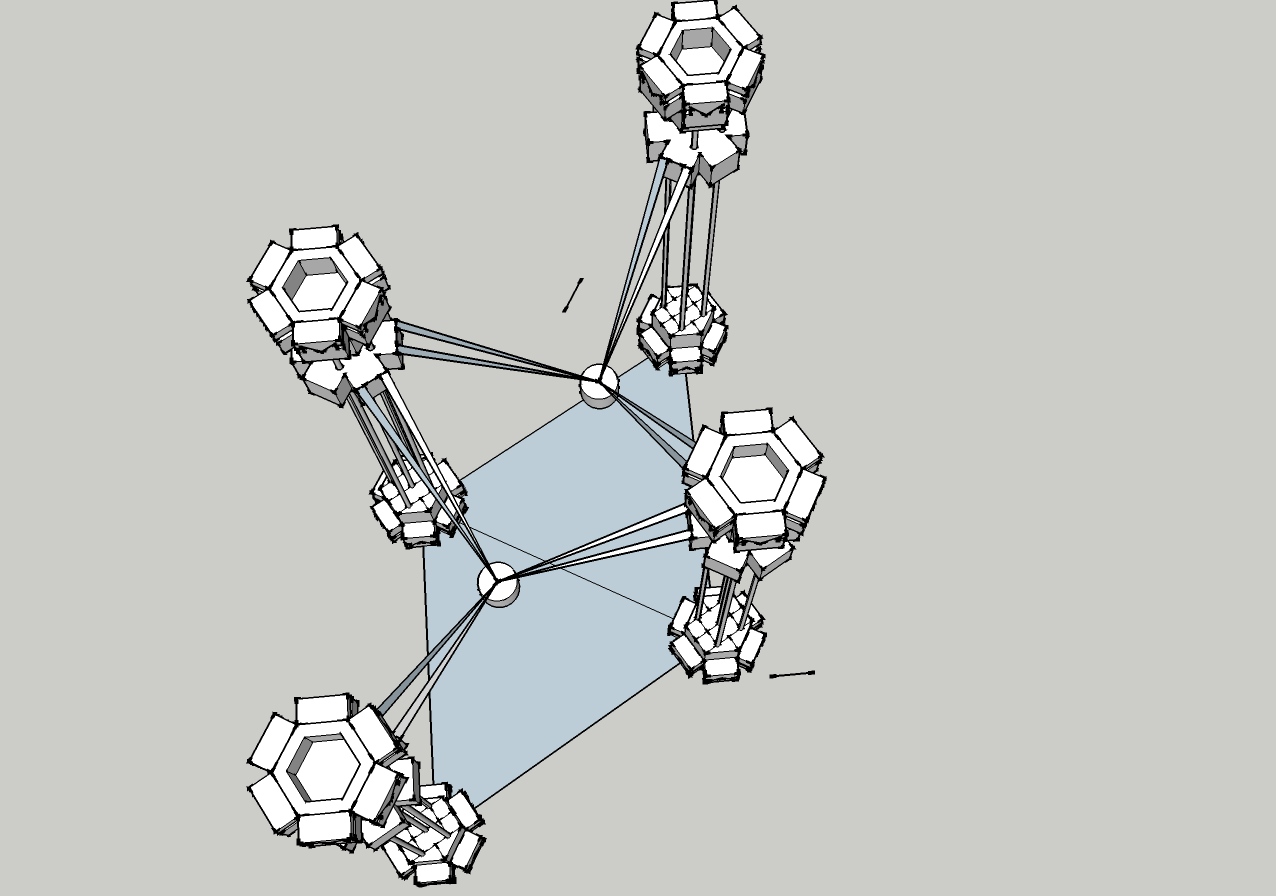
@nophead - That's why the radial symmetry is so important. Each part has to function mirrored. The design only has this replication speed advantage for producing it's own parts, or other specially designed parts. Making only stages that build the same way, without mirroring, still has a slight replication advantage, but not nearly as much of one. The attached image shows the build stage expansion up to the 2x Darwin equivalent (that is, you started with 1, produced a 2nd, and the 2 each produced another child giving a total of 4). In the image, all build platforms have XYZ arranged in a counterclockwise order to build identical parts. The design of columns specifically for this mode of replication would actually be easier than for the other mode - they only need to be triangular rather than hexagonal.
*EDIT to add the image I forgot to attach the first time
Edited 1 time(s). Last edit at 04/21/2009 11:51AM by Corwin.
Btw, what kind of resolution do you need? I was planning to design it with NEMA 17s and 1/4-20 threaded rod assumed for the stages,
I know software is a sticking point for it, but I figured that if I could come up with a mechanical design and Festo could come up with software, it might just happen that the RepRap community could figure out software too XD
@nophead - That's why the radial symmetry is so important. Each part has to function mirrored. The design only has this replication speed advantage for producing it's own parts, or other specially designed parts. Making only stages that build the same way, without mirroring, still has a slight replication advantage, but not nearly as much of one. The attached image shows the build stage expansion up to the 2x Darwin equivalent (that is, you started with 1, produced a 2nd, and the 2 each produced another child giving a total of 4). In the image, all build platforms have XYZ arranged in a counterclockwise order to build identical parts. The design of columns specifically for this mode of replication would actually be easier than for the other mode - they only need to be triangular rather than hexagonal.
*EDIT to add the image I forgot to attach the first time
Edited 1 time(s). Last edit at 04/21/2009 11:51AM by Corwin.
|
Re: An Argument for A Tripod April 21, 2009 12:59PM |
Registered: 15 years ago Posts: 88 |
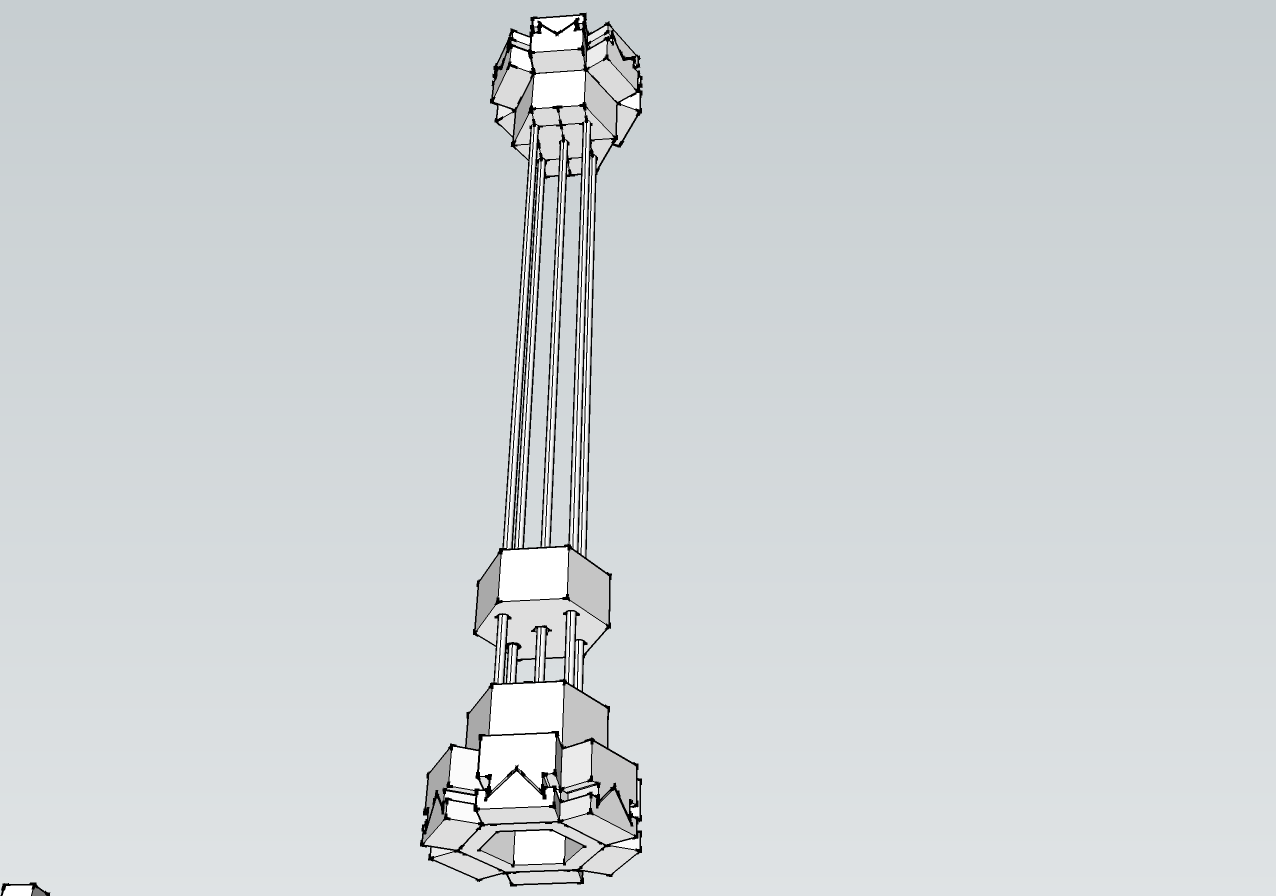
Double-posting to put up a quick 3d model I made in Sketchup of a hexagonal stepper column. the center of the five 1/4" rods would be the threaded rod. The dimensions aren't right at the moment for any real products, but the other four would be smooth 1/4" with a sintered bronze bearing in the carriage for each. The stepper motor would be in a cavity under the bottom unit (for the moment, the one on top is identical to the one on bottom, but it wouldn't be in reality). The weird triangular thingies are clamps for angle iron/aluminum for making the structure. It's kind of weird to think about, but when you're looking at the image please realize the links to the toolhead would come from the vertical edges of the carriage as it is drawn now, not the faces.
|
Re: An Argument for A Tripod April 21, 2009 02:01PM |
Admin Registered: 16 years ago Posts: 13,888 |
Hi Corwin,
there are mostly geometrical limitations, as the hinges atached to the linear stage aren't stable or defined properly when reaching sideways in the area of neighbour-triangles.
For this kind of 'cooperation' between different areals scara-robots (see [www.harmonicdrive.de] for some infos) will be much better - they operate around a fixed position and when this position is a rotating axis, they can operate in a 360°-zone with the radius of the arms ...
Viktor
there are mostly geometrical limitations, as the hinges atached to the linear stage aren't stable or defined properly when reaching sideways in the area of neighbour-triangles.
For this kind of 'cooperation' between different areals scara-robots (see [www.harmonicdrive.de] for some infos) will be much better - they operate around a fixed position and when this position is a rotating axis, they can operate in a 360°-zone with the radius of the arms ...
Viktor
|
Re: An Argument for A Tripod April 21, 2009 07:52PM |
Registered: 15 years ago Posts: 88 |
Viktor, I'm not sure we're on the same page here. The arms don't "cooperate" or "reach" between triangles. Each triangle is a completely separate build area with it's own hinges and extruder (now that I think about it, getting that many extruders running could be quite a challenge in itself XD). Hopefully the image attached to this can help clear things up somewhat if I'm right about where we're miscommunicating.
|
Re: An Argument for A Tripod April 21, 2009 08:51PM |
Registered: 15 years ago Posts: 251 |
Greetings Viktor, Corwin, et all,
I've thought a fair bit about closed-chain linkages, Stewart/Gough platforms and related mechanisms, originally in the context of robot manipulators, and then (after Viktor's first post on the subject) for use in repRapping.
The software for controlling a closed-chain (or parallel) mechanism is "non-trivial" -- a polite way of saying it's a major pain -- except for special cases!
Acutally, the three-DOF ones aren't nearly as bad as full 6-DOF, but it's still not something I know how to do with an 8-bit micro. When I designed a controller for a 6-DOF Stewart platform, I used a PowerPC processor, and I really excercised its floating-point abilities.....
One of the key advantages of a cartesian 'bot is that the axes remain orthogonal, and the Jacobian (mapping of motor-space velocities to tool-space velocities is simple, constant, and decoupled -- basically an identity matrix, unless you have different pitches on your lead screws.
For many (most) of the parallel-linkage mechanisms, the Jacobian is not constant, and it can have singularities (bad news!) at multiple points inside the workspace.
However, there is a particular parallel mechanism, the " Cartesian Parallel Manipulator" See [www.ijcas.org] Especially Figures 1. and 2 that has perfectly orthoginal behavior throughout its workspace, so solving its kinematics is just as trivial as for a cartesian bot -- because it *is* a Cartesian 'bot, in its essense! (Wish I'd thought of this!) It also has no singularities in the interior of the workspace, so far as I know.
However, I believe there are patents on this, however. And this may complicate adopting such a design for repRap (or similar) machines.
On the downside, it needs two additional hinges for each linear joint. And if these are sloppy, the mechanism's quality of motion control will likewise suffer.
But the links supporting the moving body take loads only in tension/compression, rather than in bending or torsion.
--- OOPS! ON CLOSER EXAMINATION, I SEE THAT'S NOT TRUE. (I was recalling a classic Stewart {or Gough, depending on where you studied} platform, with six linear actuators, each with ball joints on their ends. In that mechanism, those long links are in pure tension/compression. My bad.
Anyhow, food for thought,
Edited 2 time(s). Last edit at 04/22/2009 07:23AM by Larry Pfeffer.
Larry Pfeffer,
My blog about building repstrap Cerberus:
[repstrap-cerberus.blogspot.com]
I've thought a fair bit about closed-chain linkages, Stewart/Gough platforms and related mechanisms, originally in the context of robot manipulators, and then (after Viktor's first post on the subject) for use in repRapping.
The software for controlling a closed-chain (or parallel) mechanism is "non-trivial" -- a polite way of saying it's a major pain -- except for special cases!
Acutally, the three-DOF ones aren't nearly as bad as full 6-DOF, but it's still not something I know how to do with an 8-bit micro. When I designed a controller for a 6-DOF Stewart platform, I used a PowerPC processor, and I really excercised its floating-point abilities.....
One of the key advantages of a cartesian 'bot is that the axes remain orthogonal, and the Jacobian (mapping of motor-space velocities to tool-space velocities is simple, constant, and decoupled -- basically an identity matrix, unless you have different pitches on your lead screws.
For many (most) of the parallel-linkage mechanisms, the Jacobian is not constant, and it can have singularities (bad news!) at multiple points inside the workspace.
However, there is a particular parallel mechanism, the " Cartesian Parallel Manipulator" See [www.ijcas.org] Especially Figures 1. and 2 that has perfectly orthoginal behavior throughout its workspace, so solving its kinematics is just as trivial as for a cartesian bot -- because it *is* a Cartesian 'bot, in its essense! (Wish I'd thought of this!) It also has no singularities in the interior of the workspace, so far as I know.
However, I believe there are patents on this, however. And this may complicate adopting such a design for repRap (or similar) machines.
On the downside, it needs two additional hinges for each linear joint. And if these are sloppy, the mechanism's quality of motion control will likewise suffer.
But the links supporting the moving body take loads only in tension/compression, rather than in bending or torsion.
--- OOPS! ON CLOSER EXAMINATION, I SEE THAT'S NOT TRUE. (I was recalling a classic Stewart {or Gough, depending on where you studied} platform, with six linear actuators, each with ball joints on their ends. In that mechanism, those long links are in pure tension/compression. My bad.
Anyhow, food for thought,
Edited 2 time(s). Last edit at 04/22/2009 07:23AM by Larry Pfeffer.
Larry Pfeffer,
My blog about building repstrap Cerberus:
[repstrap-cerberus.blogspot.com]
|
Re: An Argument for A Tripod April 21, 2009 09:01PM |
Registered: 15 years ago Posts: 88 |
That Cartesian parallel manipulator is very cool indeed.. Those linkages are definitely the sticking point, though. There's actually a way of doing something similar with a more traditional Cartesian layout using a lot of linear bearings to decouple the motion in the same way, it's just expensive XD.
Correct me if I'm wrong, but the links are actually taking ALL the load in torsion as far as I can tell. Each axis allows movement in the other two because the joints hinge in their direction, and transmits/controls motion because the load goes perpendicular to the hinge, which means a torsional load on the joint.
Correct me if I'm wrong, but the links are actually taking ALL the load in torsion as far as I can tell. Each axis allows movement in the other two because the joints hinge in their direction, and transmits/controls motion because the load goes perpendicular to the hinge, which means a torsional load on the joint.
|
Re: An Argument for A Tripod April 21, 2009 11:31PM |
Registered: 16 years ago Posts: 536 |
Corwin, I think there's compression/tension as well as torsion to deal with. Victor's designs use the two parallel arms per actuator to limit the rotation of the extruder. If the two arms come together at the extruder, as in your Sketchup drawing, then you've constrained the extruder in the 3 positional degrees of freedom - x, y and z, but not the 3 rotational degrees of freedom - xx, yy, and zz. Check out Victor's string bot diagrams - there he used two strings offset vertically per axis to constrain the rotation of the extruder.
I've been thinking of a string bot to setup a simple telepresence rig in my lab, but the rotational stability of the bot is tricky - it needs at least 6 strings to prevent the camera from swinging all over the place.
Wade
I've been thinking of a string bot to setup a simple telepresence rig in my lab, but the rotational stability of the bot is tricky - it needs at least 6 strings to prevent the camera from swinging all over the place.
Wade
|
Re: An Argument for A Tripod April 22, 2009 01:36AM |
Registered: 15 years ago Posts: 88 |
Actually the way those lines run in should be ignored.. it was just a really quick way of showing that each center point has independent connectors to the column. Sorry for the confusion. My intention for the actual design is to use standard 1/4" tie rod ends (because I can get them at the local hardware store, and I would assume the same is true for most people in the U.S.) or possibly magnets, like Viktor's original design.
|
Re: An Argument for A Tripod April 22, 2009 02:09AM |
Registered: 16 years ago Posts: 536 |
|
Re: An Argument for A Tripod April 22, 2009 03:31AM |
Admin Registered: 16 years ago Posts: 13,888 |
Hi Corwin,
... another point is the linking between the linear stages for different triangles - you're extremely limitated in positioning when the lines are on the same slider.
You have to separate all the stages per triangle and essentially you have to count all the parts for a triangle, so you can't optimize per bar - every hexagon is built out of 6 completelly separated tripods ...
Viktor
... another point is the linking between the linear stages for different triangles - you're extremely limitated in positioning when the lines are on the same slider.
You have to separate all the stages per triangle and essentially you have to count all the parts for a triangle, so you can't optimize per bar - every hexagon is built out of 6 completelly separated tripods ...
Viktor
|
Re: An Argument for A Tripod April 22, 2009 10:13AM |
Registered: 15 years ago Posts: 88 |
I'm not sure I understand your objection this time.. The linkages were intended to be the same as in your tripod on [builders.reprap.org], or possibly a little closer to that on the iFab if I went with tierod ends. The two parallel bars with universal joints system coming from one slider seems to work just fine for positioning. Since all I'm trying to do is make each tripod (each triangle of the hexagon) produce an identical part, I don't really see what the issue is. If you're just talking about the difficulty of getting each linkage identical.. yeah that could be tricky, but that's why you build jigs first and design adjustment into your parts.
@Wade - the torsion thing was talking about the "parallel cartesian" bot. Although actually there is torsion on the linear stages of a tripod (unless you have another linkage opposite it, in which case the torques would balance XD).
Edited 1 time(s). Last edit at 04/22/2009 12:49PM by Corwin.
@Wade - the torsion thing was talking about the "parallel cartesian" bot. Although actually there is torsion on the linear stages of a tripod (unless you have another linkage opposite it, in which case the torques would balance XD).
Edited 1 time(s). Last edit at 04/22/2009 12:49PM by Corwin.
|
Re: An Argument for A Tripod April 22, 2009 02:44PM |
Admin Registered: 16 years ago Posts: 13,888 |
Hi Corwin,
... look at your last drawing - it seems that all the parallel bars atached to a specific stage runs on the same vertical slider.
For parallel fabbing in neighbour-areas you have to separate the sliders, so for a complete hexagon assembled from 6 tripods the center-stage should have 6 separate sliders and all border-stages two (or more, when other tripods are atached too)
Viktor
... look at your last drawing - it seems that all the parallel bars atached to a specific stage runs on the same vertical slider.
For parallel fabbing in neighbour-areas you have to separate the sliders, so for a complete hexagon assembled from 6 tripods the center-stage should have 6 separate sliders and all border-stages two (or more, when other tripods are atached too)
Viktor
|
Re: An Argument for A Tripod April 22, 2009 05:58PM |
Registered: 15 years ago Posts: 88 |
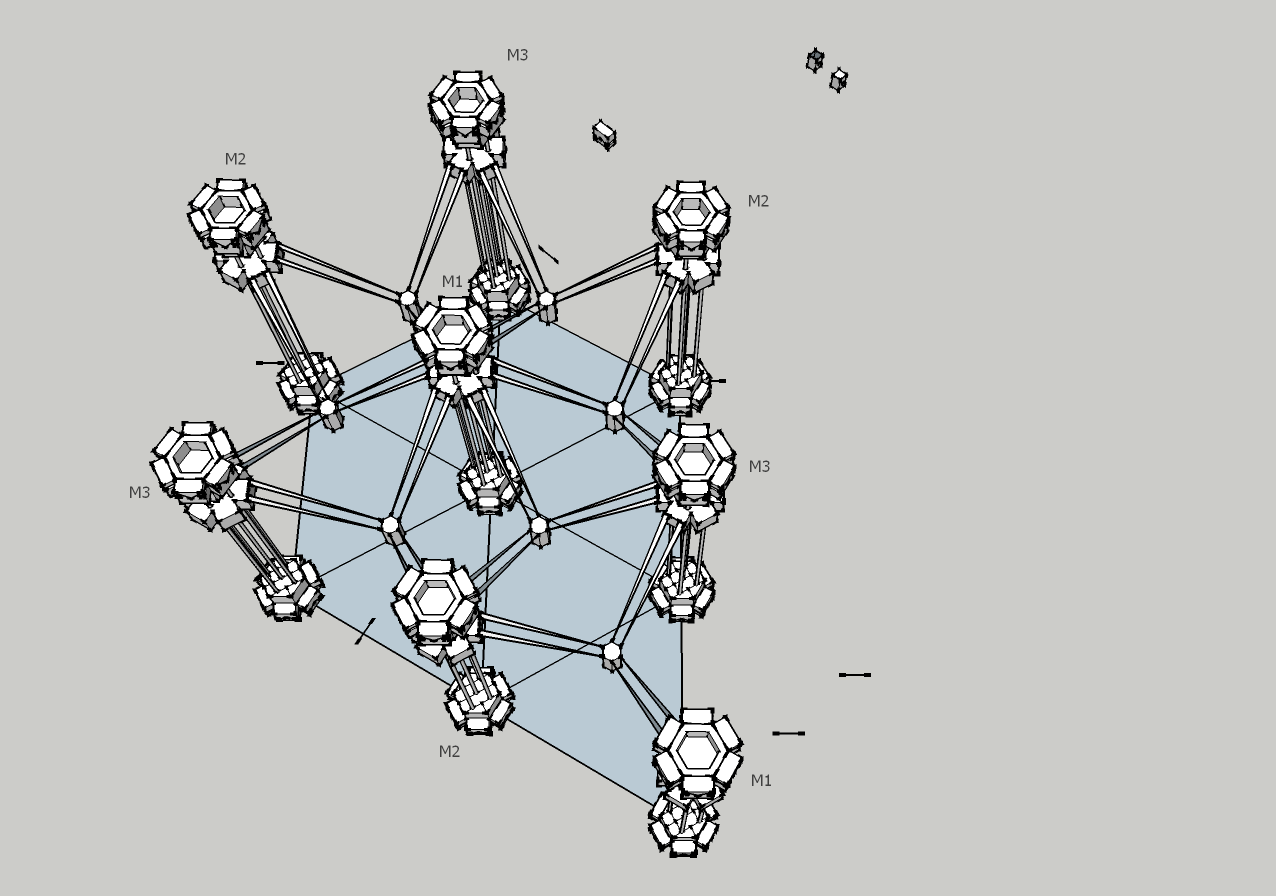
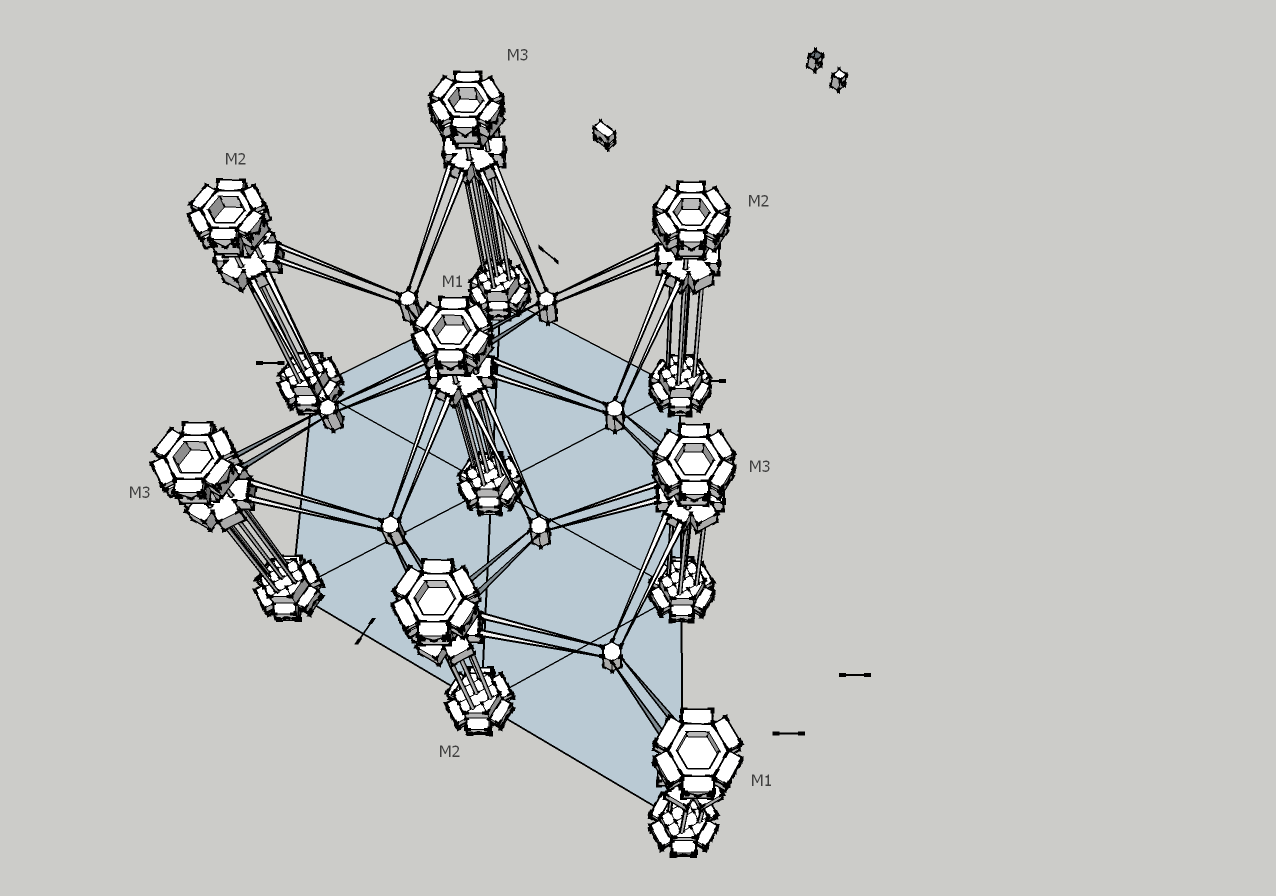
Another drawing, updated to emphasize parallel bars and expanded to show a configuration of 7 building tripods. Also, an "axis" designation, M1, M2, or M3 is appended to each column to show which ones are hooked together.
Viktor, I still don't understand the problem. As I understand it, any point in the build space is described by 3 values, one for each column - call them M1, M2, and M3 for now. Any two identical tripods given the same M1, M2 and M3 values in software will move to the same point, with no difference in the positioning of their stages to make the move. In other words, if 3 tripods are side by side running the same program, all of their M1 stages will be at the same point at any given time. If this is true, I can see no reason why all 3 M1 stages could not be actuated by the same drive system.
Two more thought experiments for possible design consideration:
Vertical doubling: if you extend the drive leadscrews to twice the height needed for a tripod, you should be able to put a second stage (leadnut + parallel bar setup) on each column, add a second build platform in the middle of the system, and accomplish the same thing. This could be done with a modular design as well, with a coupler for the top of the bottom-most stage and the bottom and top of stages added on top.
2-extruder shared platform: if you had two tripods setup like the pair at the bottom of the image on this post (two seperate M1 stages sharing an M2 and M3), with a belt or chain to transmit motion between the two M1 stages, you could put a support extruder on one tripod and a build extruder on the other, and place a motorized build stage underneath that can switch between tripods. Because the workpiece moves between them, the extruder not in use can't get in the way even while sharing motors with the other.
Viktor, I still don't understand the problem. As I understand it, any point in the build space is described by 3 values, one for each column - call them M1, M2, and M3 for now. Any two identical tripods given the same M1, M2 and M3 values in software will move to the same point, with no difference in the positioning of their stages to make the move. In other words, if 3 tripods are side by side running the same program, all of their M1 stages will be at the same point at any given time. If this is true, I can see no reason why all 3 M1 stages could not be actuated by the same drive system.
Two more thought experiments for possible design consideration:
Vertical doubling: if you extend the drive leadscrews to twice the height needed for a tripod, you should be able to put a second stage (leadnut + parallel bar setup) on each column, add a second build platform in the middle of the system, and accomplish the same thing. This could be done with a modular design as well, with a coupler for the top of the bottom-most stage and the bottom and top of stages added on top.
2-extruder shared platform: if you had two tripods setup like the pair at the bottom of the image on this post (two seperate M1 stages sharing an M2 and M3), with a belt or chain to transmit motion between the two M1 stages, you could put a support extruder on one tripod and a build extruder on the other, and place a motorized build stage underneath that can switch between tripods. Because the workpiece moves between them, the extruder not in use can't get in the way even while sharing motors with the other.
|
Re: An Argument for A Tripod April 23, 2009 03:22AM |
Admin Registered: 16 years ago Posts: 13,888 |
Hi Corwin,
... let only the middle-stage of the complete hexagon move down: - then all 6 fabbing heads will move simultan perpendicular away from the stage!
With fixing all bars of a stage to a single slider the fabbing heads can move only in the sphere defined by the length of the bars, what's extremely limitating the usability of this kind of setup.
So for every move of a fabbing head you have to recalculate all neighbour paths in respect to the actual moving of all three specific sliders simultaniously - this will enhance the complexitiy of the path-calculation by power of three compared to complete separated sliders per triangle ...
Viktor
... let only the middle-stage of the complete hexagon move down: - then all 6 fabbing heads will move simultan perpendicular away from the stage!
With fixing all bars of a stage to a single slider the fabbing heads can move only in the sphere defined by the length of the bars, what's extremely limitating the usability of this kind of setup.
So for every move of a fabbing head you have to recalculate all neighbour paths in respect to the actual moving of all three specific sliders simultaniously - this will enhance the complexitiy of the path-calculation by power of three compared to complete separated sliders per triangle ...
Viktor
|
Re: An Argument for A Tripod April 23, 2009 02:31PM |
Registered: 15 years ago Posts: 88 |
I think I understand what you mean.. the thing is I don't agree that it changes the mathematical complexity.
When you lower a stage, the print heads attached to it move away from it. For the center one, this means they all move towards the outside of the hexagon, towards the edge between the other two stages. For another stage, the movement is in a different direction - but it has the same magnitude and relative angle from the stage for each. I'm aware the tripod system using parallel fixed-length bars is a limited system, but it doesn't have to be the most efficient use of space to be the most efficient use of materials/printed parts. When you've calculated the movements for the first tripod, applying the same movements to the others should produce the same final object, just rotated some multiple of 60 degrees.
When you lower a stage, the print heads attached to it move away from it. For the center one, this means they all move towards the outside of the hexagon, towards the edge between the other two stages. For another stage, the movement is in a different direction - but it has the same magnitude and relative angle from the stage for each. I'm aware the tripod system using parallel fixed-length bars is a limited system, but it doesn't have to be the most efficient use of space to be the most efficient use of materials/printed parts. When you've calculated the movements for the first tripod, applying the same movements to the others should produce the same final object, just rotated some multiple of 60 degrees.
|
Re: An Argument for A Tripod April 23, 2009 04:21PM |
Admin Registered: 16 years ago Posts: 13,888 |
Hi Corwin,
... sorry, it's a bit more complex than only copying sixfold: - when you move one of the outer sliders, then again two fabbing heads are moved simultanous but again perpendicular away from or to this stage.
So when fabbing with a hexagonal setup in parallel, you'll get tree identical objects rotated 120 degrees each around the centrum ... and three mirrored objects inbetween too!
So this design is only suitable for 3-count sets with mirrored counterparts
If you want fabbing separate objects (or maybe pairs/even counts), then you are limited to only three fabbing tripods per hexagon (as the neighbours are quasi mirrored), so you have to leave them inactive with passive moving heads and have to check for possible collisions with the base and stages too.
And your optimal building startegy is a very complex slicer with synchronized central slider over all three fabbing areas ...
Viktor
... sorry, it's a bit more complex than only copying sixfold: - when you move one of the outer sliders, then again two fabbing heads are moved simultanous but again perpendicular away from or to this stage.
So when fabbing with a hexagonal setup in parallel, you'll get tree identical objects rotated 120 degrees each around the centrum ... and three mirrored objects inbetween too!
So this design is only suitable for 3-count sets with mirrored counterparts
If you want fabbing separate objects (or maybe pairs/even counts), then you are limited to only three fabbing tripods per hexagon (as the neighbours are quasi mirrored), so you have to leave them inactive with passive moving heads and have to check for possible collisions with the base and stages too.
And your optimal building startegy is a very complex slicer with synchronized central slider over all three fabbing areas ...
Viktor
|
Re: An Argument for A Tripod April 23, 2009 07:12PM |
Registered: 15 years ago Posts: 88 |
Ahh, ok. So you've been talking about the same thing nophead, brought up, the mirrored parts in every other tripod. You're absolutely right - you get 3 of the same, and 3 mirrored of the same for every hex of buildspaces.
That's EXACTLY what I'm trying to produce, though. The design goal here isn't to produce a lot of unique objects, it's to produce a lot of the same object quickly and efficiently. Once you've expanded your first printer to having 3 build platforms, you can produce a whole new tripod in 1/3 the time. If you need to make designs that can't be mirrored, there is another way of hooking up the tripod units to do parallel production that produces identical parts with a less efficient arrangement of columns * see [forums.reprap.org] for the arrangement *
This lets one person expand their production capacity very quickly for making more printers to distribute. Remember, so far there have been only a couple documented cases of child Repraps actually getting completely printed and used, and part of the reason for that is that a Darwin represents a lot of printing time. This is just a different biological reproduction model, one that allows for litters instead of single children. A hex built like this can produce twins (two full sets of parts for tripods) by running the code to produce a single column. If you wan the most efficient use of the columns, then you need to design with radial symmetry, yes. But that's ok, because a base for a tripod like this has to be radially symmetrical to funtion anyway.
I guess this is one of the things Forrest has been talking about with focus on replication vs. everything else.. the ONLY advantage of this design is in self replication. It actually has a couple of disadvantages as a single printer (tripod) design, namely slightly more complex software and slightly less efficient use of volume/desk space. If the basic tenet of the RepRap is true (that a self-replicating thing will always outcompete a non-self-replicating one), then that doesn't matter.
Over the long term, this design would be cheaper and faster to produce. It's also more useful industrially - with enough leadtime, one HexRap (my new name for it XD) can expand to fill an entire warehouse and then switch into factory mode, producing many copies of a part designed for production by additive freeform fabrication. Even better for a small business (like someone making opensource hardware to sell online), as a manufacturing plant it can expand to meet demand. You could ramp up production without having to make a huge upfront investment in a new production machine - just bud off a few with new control electronics and set them making more columns.
That's EXACTLY what I'm trying to produce, though. The design goal here isn't to produce a lot of unique objects, it's to produce a lot of the same object quickly and efficiently. Once you've expanded your first printer to having 3 build platforms, you can produce a whole new tripod in 1/3 the time. If you need to make designs that can't be mirrored, there is another way of hooking up the tripod units to do parallel production that produces identical parts with a less efficient arrangement of columns * see [forums.reprap.org] for the arrangement *
This lets one person expand their production capacity very quickly for making more printers to distribute. Remember, so far there have been only a couple documented cases of child Repraps actually getting completely printed and used, and part of the reason for that is that a Darwin represents a lot of printing time. This is just a different biological reproduction model, one that allows for litters instead of single children. A hex built like this can produce twins (two full sets of parts for tripods) by running the code to produce a single column. If you wan the most efficient use of the columns, then you need to design with radial symmetry, yes. But that's ok, because a base for a tripod like this has to be radially symmetrical to funtion anyway.
I guess this is one of the things Forrest has been talking about with focus on replication vs. everything else.. the ONLY advantage of this design is in self replication. It actually has a couple of disadvantages as a single printer (tripod) design, namely slightly more complex software and slightly less efficient use of volume/desk space. If the basic tenet of the RepRap is true (that a self-replicating thing will always outcompete a non-self-replicating one), then that doesn't matter.
Over the long term, this design would be cheaper and faster to produce. It's also more useful industrially - with enough leadtime, one HexRap (my new name for it XD) can expand to fill an entire warehouse and then switch into factory mode, producing many copies of a part designed for production by additive freeform fabrication. Even better for a small business (like someone making opensource hardware to sell online), as a manufacturing plant it can expand to meet demand. You could ramp up production without having to make a huge upfront investment in a new production machine - just bud off a few with new control electronics and set them making more columns.
|
Re: An Argument for A Tripod May 07, 2009 12:58AM |
Sounds like an interesting idea. If we're interested in only 3 cartesian dimensions, I think the control software should be doable. I have a few questions about the implementation though.
1. what are you suspending the print heads by?
Is it a solid material with hinges/joints? If so, what's the simplest (easiest to make) design these can use? I'm guessing reprap's print style will make ball joints less favorable for printable parts...
If it isn't a solid material, or the joints don't stabilize the head enough, then you will end up with wobbles and swings from inertia/friction generated flex as you print. How do you plan to counteract this? Adding more weight to the print head would just increase inertia, so while it's the simple solution, it's not a great one.
2. Given the design of the system, are lead screws the best way to drive it? The way I understand it, a tripod system should have better 2D resolution simply because even the 2D movement is controlled by 3 motors instead of 1 (I know it's a lot more complicated than this, but intuitively the resolution at any layer should be a bit higher).
Maybe a counterweight-pulley type system would be both more replicable and faster without sacrificing the necessary accuracy. This would depend on question 1 being solved, of course :-)
1. what are you suspending the print heads by?
Is it a solid material with hinges/joints? If so, what's the simplest (easiest to make) design these can use? I'm guessing reprap's print style will make ball joints less favorable for printable parts...
If it isn't a solid material, or the joints don't stabilize the head enough, then you will end up with wobbles and swings from inertia/friction generated flex as you print. How do you plan to counteract this? Adding more weight to the print head would just increase inertia, so while it's the simple solution, it's not a great one.
2. Given the design of the system, are lead screws the best way to drive it? The way I understand it, a tripod system should have better 2D resolution simply because even the 2D movement is controlled by 3 motors instead of 1 (I know it's a lot more complicated than this, but intuitively the resolution at any layer should be a bit higher).
Maybe a counterweight-pulley type system would be both more replicable and faster without sacrificing the necessary accuracy. This would depend on question 1 being solved, of course :-)
|
Re: An Argument for A Tripod May 07, 2009 03:07AM |
Admin Registered: 16 years ago Posts: 13,888 |
Hi Merlz,
... look here: [forums.reprap.org] - especially the links and images in my post ...
and here: [forums.reprap.org]
Maybe some other ideas too ...
Viktor
... look here: [forums.reprap.org] - especially the links and images in my post ...
and here: [forums.reprap.org]
Maybe some other ideas too ...
Viktor
|
Re: An Argument for A Tripod May 09, 2009 06:21AM |
Well, in that case it looks like a good idea :-)
That micro-tripod platform made from a flat plastic sheet is especially impressive. The ability to have a stationary (and potentially much bulkier) print head is pretty tempting - and tripod seems a much easier way to move the print bed than a 3-axis cartesian assembly. From the replication point of view, all you'd need to replicate would be the print head to increase printing capacity (providing you had a large enough print platform). The only real issue would be having a stiff and light printing platform.
This has me hoping I can scrounge the parts sometime soon to try something similar! :-)
That micro-tripod platform made from a flat plastic sheet is especially impressive. The ability to have a stationary (and potentially much bulkier) print head is pretty tempting - and tripod seems a much easier way to move the print bed than a 3-axis cartesian assembly. From the replication point of view, all you'd need to replicate would be the print head to increase printing capacity (providing you had a large enough print platform). The only real issue would be having a stiff and light printing platform.
This has me hoping I can scrounge the parts sometime soon to try something similar! :-)
|
Re: An Argument for A Tripod May 09, 2009 12:34PM |
Admin Registered: 16 years ago Posts: 13,888 |

|
Re: An Argument for A Tripod May 18, 2009 04:47PM |
Registered: 14 years ago Posts: 2 |
Hi Viktor,
I have nearly completed a Cupcake, and am thinking about building a much larger 2nd generation machine. I am aware of the issues with extruding larger objects, I am interested in a machine that can extrude many smaller objects in a row. I am interested in your tripod approach. The construction simplicity and the elegance of the magnetic joints is impressive. How far along is the software, and who is working on it? Thanks.
Cheers,
Adam
I have nearly completed a Cupcake, and am thinking about building a much larger 2nd generation machine. I am aware of the issues with extruding larger objects, I am interested in a machine that can extrude many smaller objects in a row. I am interested in your tripod approach. The construction simplicity and the elegance of the magnetic joints is impressive. How far along is the software, and who is working on it? Thanks.
Cheers,
Adam
|
Re: An Argument for A Tripod May 19, 2009 03:18AM |
Admin Registered: 16 years ago Posts: 13,888 |
Hi Adam,
when i started with the tripod two years ago there were someone willing to make the software, but now we lost contact (seems he migrated to the USA ) and so it's my part now, i think
) and so it's my part now, i think 
But actually i'm busy with some other work, so the tripod-development is pausing.
Maybe you can configure the kinematics with EMC2? There are some specs for hexapods/tripods, so my tripod-structure should work too ...
Viktor
when i started with the tripod two years ago there were someone willing to make the software, but now we lost contact (seems he migrated to the USA
) and so it's my part now, i think But actually i'm busy with some other work, so the tripod-development is pausing.
Maybe you can configure the kinematics with EMC2? There are some specs for hexapods/tripods, so my tripod-structure should work too ...
Viktor
|
Re: An Argument for A Tripod May 22, 2009 07:29AM |
Registered: 15 years ago Posts: 242 |

|
Re: An Argument for A Tripod May 23, 2009 09:28AM |
The xyz position is just the intersection solution to 3 spheres of equal radius, each constrained along a linear position. This isn't a complete physical representation, of course... but using this approach, the parallel joints can be ignored as they're effectively only a radius connection to the platform.
Should be solvable with a few pages of paper and some high school maths :-)
Configuration would only be for the positioning of the columns and the separation of the connections on the toolhead.
As for the warping and mutating - I'd imagine this tool would do that slightly unless intermediate positions were calculated for long lines (it would tend to produce warping during interpolation between calculated points).
Should be solvable with a few pages of paper and some high school maths :-)
Configuration would only be for the positioning of the columns and the separation of the connections on the toolhead.
As for the warping and mutating - I'd imagine this tool would do that slightly unless intermediate positions were calculated for long lines (it would tend to produce warping during interpolation between calculated points).
|
Re: An Argument for A Tripod May 26, 2009 08:49AM |
Registered: 14 years ago Posts: 2 |

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Sorry, only registered users may post in this forum.