Sextupteron
Posted by nicholas.seward
|
Re: Sextupteron July 31, 2013 07:32PM |
Registered: 10 years ago Posts: 24 |
|
Re: Sextupteron July 31, 2013 07:34PM |
Registered: 10 years ago Posts: 979 |
|
Re: Sextupteron August 01, 2013 03:36AM |
Registered: 15 years ago Posts: 401 |
|
Re: Sextupteron August 01, 2013 03:47AM |
Registered: 10 years ago Posts: 979 |
I think FEP could be a close second. Here are some previous discussion on the matter.
I actually got crystal clear FEP for the bowden tubes for Wally and Simpson. It is cool because you can see the filament inside. I can't tell a difference in friction with my microforce calibrated fingers. When I do my production run I have a supplier, Zeus, that will make custom colored tubes for me. It would be easy for them to make filament if there isn't a supplier for it already.
All that said, I think the PLA/metal will make a great joint. Keep in mind that static friction will have to take hold on both sides of the ball for there to be trouble. Experiments are required to verify. Stand back. I am doing SCIENCE.
I actually got crystal clear FEP for the bowden tubes for Wally and Simpson. It is cool because you can see the filament inside. I can't tell a difference in friction with my microforce calibrated fingers. When I do my production run I have a supplier, Zeus, that will make custom colored tubes for me. It would be easy for them to make filament if there isn't a supplier for it already.
All that said, I think the PLA/metal will make a great joint. Keep in mind that static friction will have to take hold on both sides of the ball for there to be trouble. Experiments are required to verify. Stand back. I am doing SCIENCE.
|
Re: Sextupteron August 01, 2013 03:45PM |
Registered: 10 years ago Posts: 18 |
nicholas.seward Wrote:
-------------------------------------------------------
> [LEFT CYLINDER]/[CENTER SPHERE]/[RIGHT CYLINDER]
> 1) bolt/chrome steel/bolt (I don't think this one will work.)
> 2) bolt/magnet/bolt
> 3) magnet/magnet/magnet
> 4) magnet/chrome steel/magnet
>
> I want option 4 to be the winner but we will see. I think 3 might suffer in the 90 degree position from the pole misalignment.
I think you are missing some options there. I know you like symmetry but have you considered using
5) magnet/chrome steel/bolt
6) magnet/magnet/bolt
-------------------------------------------------------
> [LEFT CYLINDER]/[CENTER SPHERE]/[RIGHT CYLINDER]
> 1) bolt/chrome steel/bolt (I don't think this one will work.)
> 2) bolt/magnet/bolt
> 3) magnet/magnet/magnet
> 4) magnet/chrome steel/magnet
>
> I want option 4 to be the winner but we will see. I think 3 might suffer in the 90 degree position from the pole misalignment.
I think you are missing some options there. I know you like symmetry but have you considered using
5) magnet/chrome steel/bolt
6) magnet/magnet/bolt
|
Re: Sextupteron August 01, 2013 04:18PM |
Registered: 10 years ago Posts: 979 |
|
Re: Sextupteron August 02, 2013 06:38PM |
Hi Nicholas! Wow! It looks really cool. And it's almost ready to build  Great.
Great.
Sorry, I didn't participate this thread previously, because all my free forces were directed to robotics discussion. It was necessary to beat off from specialists desperately with all my newbees ideas %) Thanks for the help
Ok, I'll be one of the first DIY testers. It will be really interesting to find out how easily Sextupteron can be built with available laser cutting service, 3D printer and some manufactured parts like rods, bearings and magnets. I think it will be easy even for hobbyist like me. I can't wait when it will be ready. You do great job! Thanks a lot!
Dan.
Great. Sorry, I didn't participate this thread previously, because all my free forces were directed to robotics discussion. It was necessary to beat off from specialists desperately with all my newbees ideas %) Thanks for the help
Ok, I'll be one of the first DIY testers. It will be really interesting to find out how easily Sextupteron can be built with available laser cutting service, 3D printer and some manufactured parts like rods, bearings and magnets. I think it will be easy even for hobbyist like me. I can't wait when it will be ready. You do great job! Thanks a lot!
Dan.
|
Re: Sextupteron August 11, 2013 01:03AM |
Registered: 12 years ago Posts: 85 |
|
Re: Sextupteron August 11, 2013 05:09PM |
Registered: 11 years ago Posts: 16 |
And here... Cylinder magnets and Chromed steel spheres seem to be the most cost effective combo.
[picasaweb.google.com]
Edited 1 time(s). Last edit at 08/11/2013 05:10PM by SystemsGuy.
[picasaweb.google.com]
Edited 1 time(s). Last edit at 08/11/2013 05:10PM by SystemsGuy.
|
Re: Sextupteron August 11, 2013 05:23PM |
Registered: 10 years ago Posts: 979 |
|
Re: Sextupteron August 18, 2013 08:15AM |
Registered: 10 years ago Posts: 47 |
I finally had a few minutes to run a test on the holding strength of the .5" neodymium magnets. Have a look
at the photos you can see the test revealed holding strength of 2174Grams.
Danny
neodymium holding strength
neodymium holding strength
neodymium holding strength
neodymium Joint
at the photos you can see the test revealed holding strength of 2174Grams.
Danny
neodymium holding strength
neodymium holding strength
neodymium holding strength
neodymium Joint
|
Re: Sextupteron August 27, 2013 07:18PM |
Registered: 10 years ago Posts: 1,381 |
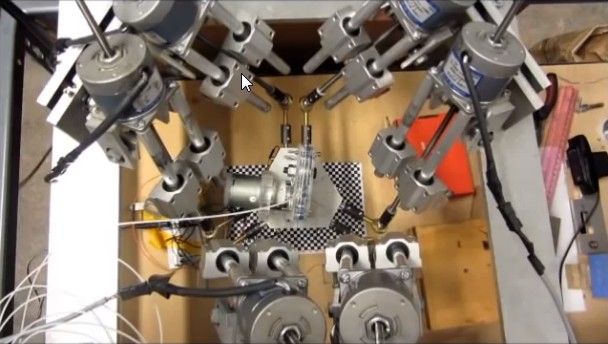
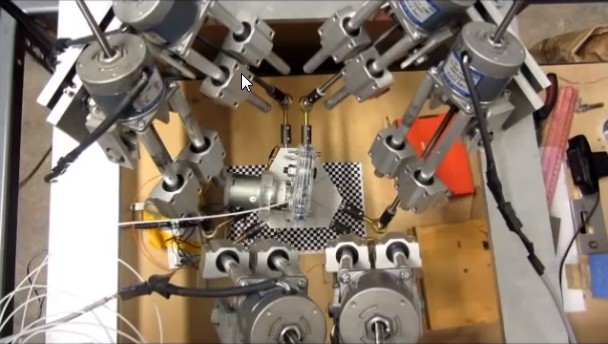
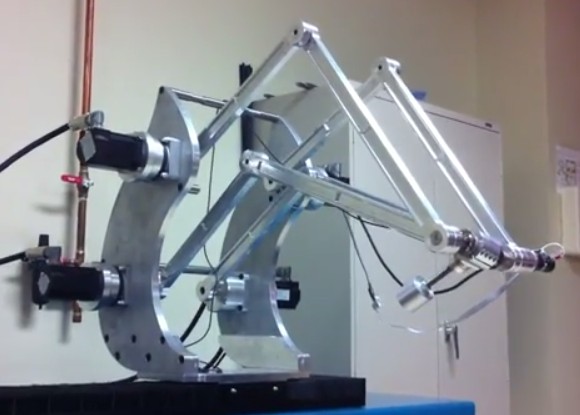
Interesting dual motor setup to get the end effector to tilt.
6 D.O.F. Hexa - Parallel Mechanism - Ege University Mech. Eng. Dep.
[www.youtube.com]
6 D.O.F. Hexa - Parallel Mechanism - Ege University Mech. Eng. Dep.
[www.youtube.com]
|
Re: Sextupteron August 31, 2013 05:55AM |
Registered: 12 years ago Posts: 85 |
|
Re: Sextupteron October 17, 2013 08:48PM |
Registered: 10 years ago Posts: 1,381 |

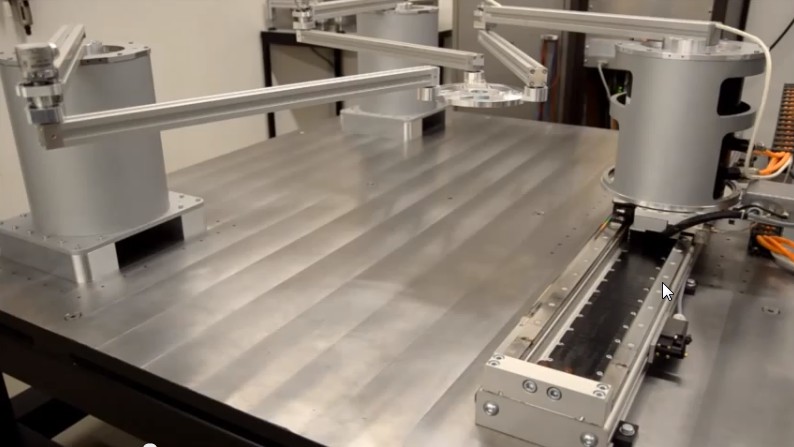
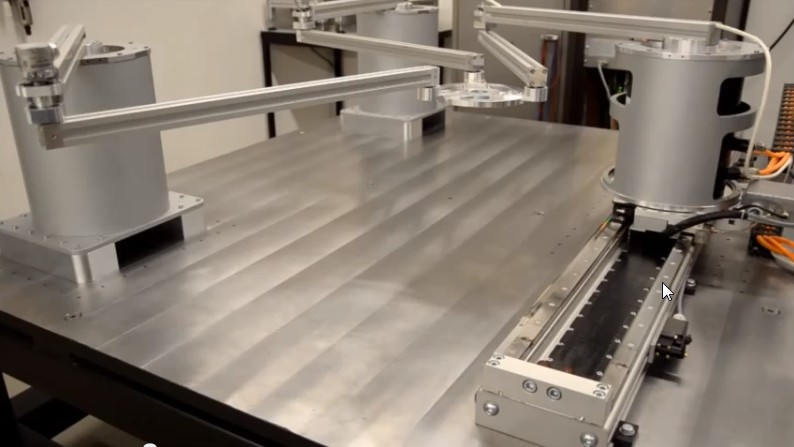
6-axis 3D Printer
[www.youtube.com]
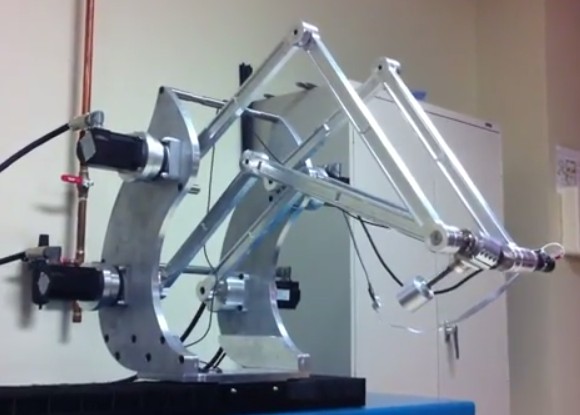
We just stumbled upon this video by Professor [Yong Chen] and his students [Xuan Song] and [Yayue Pan] on a 6-axis 3D printer. The group is from the University of Southern California and their project is called the “Development of a Low-cost Parallel Kinematic Machine for Multi-direction Additive Manufacturing”.
That’s right. 6-axes of 3D printing. It uses six linear actuators to move the tool head in almost any direction. The whole thing is powered by a KFLOP board by Dynomotion, a company dedicated to premium motion control for CNC manufacturing and robotics and automation.
In the video they give examples of printing on angled surfaces and cylindrical surfaces — but that’s just the tip of the iceberg. With 6-axes, parts could be designed with completely different characteristics, you could build up the base of a part, and then build off of it in different angles, no more horizontal layers throughout!
Unfortunately we haven’t been able to find any published information on their research, only this video — so stick around after the break and watch it in awe!
[hackaday.com]
Edited 1 time(s). Last edit at 10/17/2013 08:49PM by A2.
|
Re: Sextupteron October 18, 2013 06:59AM |
Registered: 15 years ago Posts: 401 |
I'm... not all that awed... They're using a conventional stewart platform, but inverted, which means that the frame will have rigidity problems. They're using (expensive) linear rails and pillow block. I'm not sure if they're loading them correctly to get precision. Their whole setup moves really slowly...
What's new here? A printer on a stewart platform?
Sextupteron is, at least, a novel approach to this problem.
What's new here? A printer on a stewart platform?
Sextupteron is, at least, a novel approach to this problem.
|
Re: Sextupteron October 19, 2013 05:36AM |
Registered: 10 years ago Posts: 1,381 |
I was impressed with the doubly curved print on the glass bottle.
The entombment of objects might be useful for someone.
A comment found on reddit:
"If anything, the build platform should rotate in the x and y direction so that overhangs and bad angles can print easier by rotating the entire print."
[www.reddit.com]
Maybe the end effector should be the build platform?
This would allow for more complex, and finer geometry to be printed, and the reduction/elimination of support material.
But it puts you back into the stewart platform camp.
A2
The entombment of objects might be useful for someone.
A comment found on reddit:
"If anything, the build platform should rotate in the x and y direction so that overhangs and bad angles can print easier by rotating the entire print."
[www.reddit.com]
Maybe the end effector should be the build platform?
This would allow for more complex, and finer geometry to be printed, and the reduction/elimination of support material.
But it puts you back into the stewart platform camp.
A2
|
Re: Sextupteron October 24, 2013 11:31AM |
Registered: 10 years ago Posts: 1,381 |


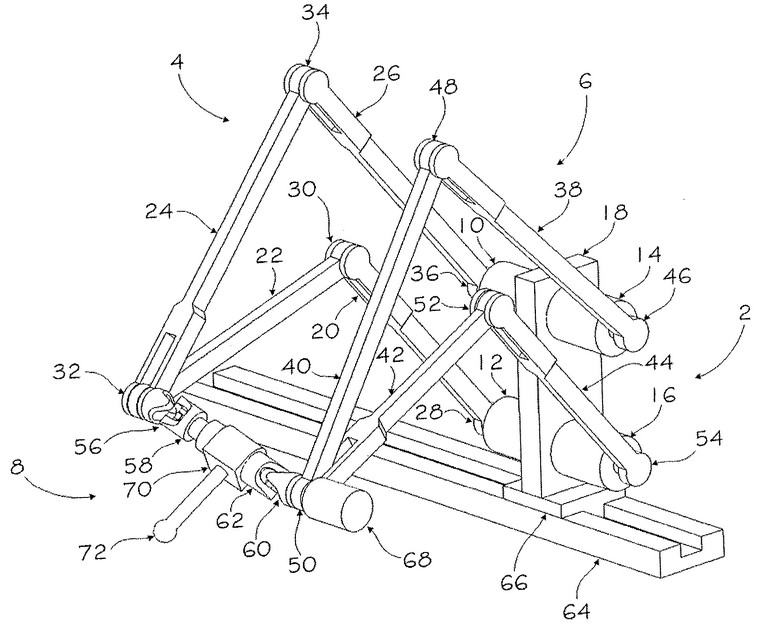
Parallel manipulator
US patent: 20080295637
[www.google.com]
CA patent: 2633395
[www.google.com]
Take a look at claim 1.
Video:
[www.youtube.com]
[www.youtube.com]
A2
Edited 2 time(s). Last edit at 10/24/2013 11:35AM by A2.
|
Re: Sextupteron October 24, 2013 11:36AM |
Registered: 10 years ago Posts: 979 |
|
Re: Sextupteron October 24, 2013 11:53AM |
Registered: 10 years ago Posts: 1,381 |
|
Re: Sextupteron October 25, 2013 04:13AM |
Registered: 10 years ago Posts: 1,381 |

Another one: Quadrupteron
Cool Video:
[www.youtube.com]
US patent: 6,729,202
[www.delphion.com]
[www.google.com]
University:
[robot.gmc.ulaval.ca]
Edited 1 time(s). Last edit at 10/25/2013 04:14AM by A2.
|
Re: Sextupteron October 25, 2013 03:37PM |
Registered: 12 years ago Posts: 1,236 |
I am currently testing a 3 extruder board for Arduino (RAMPS-FD [reprap.org]), and soon a 6 extruder extension board (EXT6 [reprap.org]). So that is 11 axes and 1 extruder, or 3 axes and 9 extruders depending on configuration, or any combination in between.
So if anyone wants to build a sextupteron, I would be happy to provide a beta board and firmware help, in order to help development. You would need to provide a Due and stepper drivers. Alternatively if there was a design and some build instructions I could maybe build one, my mechanical skills are limited.
In principle it should also work with a Mega, but I think it might run out of steam, although firmware support might be easier.
So if anyone wants to build a sextupteron, I would be happy to provide a beta board and firmware help, in order to help development. You would need to provide a Due and stepper drivers. Alternatively if there was a design and some build instructions I could maybe build one, my mechanical skills are limited.
In principle it should also work with a Mega, but I think it might run out of steam, although firmware support might be easier.
|
Re: Sextupteron November 01, 2013 11:51PM |
Registered: 10 years ago Posts: 3 |
|
Re: Sextupteron November 02, 2013 12:00AM |
Registered: 10 years ago Posts: 979 |
|
Re: Sextupteron November 14, 2013 09:31AM |
Registered: 10 years ago Posts: 1,381 |

Singularity Avoidance using Mechanisms of Variable Geometry
How to stop the end effector from shaking, after stopping.
Published on Nov 23, 2012
Jens Kotlarski
Classical robots consist of a serial kinematic structure. As a result every actuator has to move each of its following links and joints in addition to the working load. Therefore, these machines quickly reach a performance limit when standards regarding dynamics and rigidity are raised. Parallel structures characterized by closed kinematic chains hold a solution. The working load is reduced due to fixed actuators or actuators close to the base frame. Thereby, the robot's dynamics are improved. Moreover, position and orientation errors are not accumulated which results in a higher accuracy. However, parallel robots suffer from the presence of singularities within their workspace. Furthermore, several performance indices, e.g. the achievable accuracy, highly depend on the endeffector's pose.
The goal of this research project is to increase the singularity-free workspace of parallel kinematic structures through kinematic redundancy and simultaneously to improve their accuracy, stiffness, and dynamics. In addition to appropriate analyzing and evaluation methods, procedures for the optimal open- and closed-loop control of kinematically redundant mechanisms with a variable structure have to be developed and applied in practice.
[www.youtube.com]
Edited 1 time(s). Last edit at 11/14/2013 09:32AM by A2.
|
Re: Sextupteron November 15, 2013 09:57PM |
Registered: 10 years ago Posts: 3 |
|
Re: Sextupteron November 15, 2013 10:01PM |
Registered: 10 years ago Posts: 979 |
|
Re: Sextupteron November 15, 2013 10:07PM |
Registered: 10 years ago Posts: 3 |
|
Re: Sextupteron December 15, 2013 05:33PM |
Registered: 10 years ago Posts: 1 |
|
Re: Sextupteron December 15, 2013 05:52PM |
Registered: 10 years ago Posts: 1,433 |
The software is likely to turn out to be more like a 3D CNC setup than like the auto pilot stuff we use for printing. There's a lot of operator involvement in deciding what to do when and how to do it on these multi axis machines. In some cases the CAD drawings take less time than the machine programming.
|
Re: Sextupteron December 15, 2013 07:22PM |
Registered: 10 years ago Posts: 979 |



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Sorry, only registered users may post in this forum.