New Here, New Idea
Posted by BentCookie
|
New Here, New Idea July 08, 2014 02:02AM |
Registered: 9 years ago Posts: 8 |
I have decided to crack into the 3D printing game!
I've thought long and hard about printer designs, and I have a concept.
After looking around a little, I found my idea to be similar to this: Hybrid Delta-Cartesian.
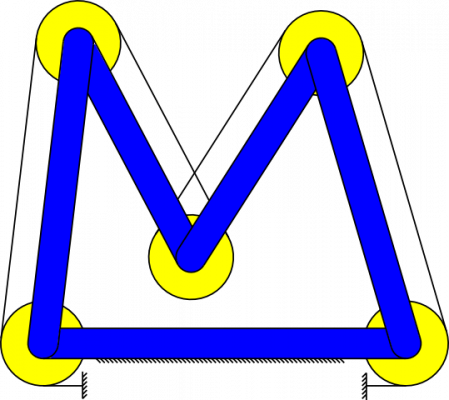
However my idea would be to further reduce the need for framework and rods e.t.c. by using a two axis delta mechanism like this:
Where the steppers are used to create rotational not linear actuation.
Now, I'm certain there are issues with this design. Please tell me why it won't work. If it would work, please help me to make it real.
Edited 1 time(s). Last edit at 07/08/2014 02:04AM by BentCookie.
I've thought long and hard about printer designs, and I have a concept.
After looking around a little, I found my idea to be similar to this: Hybrid Delta-Cartesian.
However my idea would be to further reduce the need for framework and rods e.t.c. by using a two axis delta mechanism like this:

Where the steppers are used to create rotational not linear actuation.
Now, I'm certain there are issues with this design. Please tell me why it won't work. If it would work, please help me to make it real.
Edited 1 time(s). Last edit at 07/08/2014 02:04AM by BentCookie.
|
Re: New Here, New Idea July 08, 2014 06:22AM |
Registered: 10 years ago Posts: 20 |
One issue you may have would be the resolution you get by direct-driving steppers like this. In the image above, the driven arms rotate over about 180 degrees. Given your average stepper does 200 steps per revolution, you'll only have 100 steps to play with. You can enable micro-stepping to get higher resolutions back again, but that only goes so far. I've seen some delta printers using the rotating-arm mechanism, but none of them seem to be in use now, so I suspect there were issues with them.
You could look at gearing down from stepper to arm via belt/pulley/gears, but you'll loose some of the simplicity of the design above. You can also buy steppers with integrated gearboxes, but I don't know what the slop in them is like.
You could look at gearing down from stepper to arm via belt/pulley/gears, but you'll loose some of the simplicity of the design above. You can also buy steppers with integrated gearboxes, but I don't know what the slop in them is like.
|
Re: New Here, New Idea July 08, 2014 06:41AM |
Registered: 9 years ago Posts: 8 |
|
Re: New Here, New Idea July 08, 2014 10:34AM |
Registered: 11 years ago Posts: 805 |
You still need to hang your arms somewhere stable enough in relation to the rest of the frame.
I dont see any advantage in this hybrid, apart from the nightmare youll have when start mixing parts of the delta and the Cartesian firmware, all speed and flexibility youll gain from the arms you loose on the moving bed again.
If you want to be experimental try building a delta with leadscrews instead of belts.
I dont see any advantage in this hybrid, apart from the nightmare youll have when start mixing parts of the delta and the Cartesian firmware, all speed and flexibility youll gain from the arms you loose on the moving bed again.
If you want to be experimental try building a delta with leadscrews instead of belts.
|
Re: New Here, New Idea July 08, 2014 12:59PM |
Registered: 10 years ago Posts: 979 |
Flip it upside down. There is no need to waste a big rigid frame on a 3D printer when you could just mount the motors down low. Think: 2 armed GUS Simpson. The table could be a conventional Y or you could rotate it and get rid of all the linear rails. This design would be arguably easier to calibrate than GUS is currently.
Obviously, you can get the resolution you need with GUS arms and they will stay out of the work area. (I have another iteration coming that will fix a lot of the annoying features of the arms. They are hard to string and the response isn't quite linear and they friction can be a little much.) I also have a new drive idea (for a 1-arm SCARA) in the works that would work for this if you stick with shoulder actuation. I would have the stepper turn a pinion that would turn two larger gears. These gears would drive two spools which each send string to opposite sides of the shoulder pulley. A guitar tuner would tension the system and would remove all backlash from the gears.
ConceptFORGE
Wally, GUS Simpson, LISA Simpson, THOR Simpson, Sextupteron, CoreXZ
Obviously, you can get the resolution you need with GUS arms and they will stay out of the work area. (I have another iteration coming that will fix a lot of the annoying features of the arms. They are hard to string and the response isn't quite linear and they friction can be a little much.) I also have a new drive idea (for a 1-arm SCARA) in the works that would work for this if you stick with shoulder actuation. I would have the stepper turn a pinion that would turn two larger gears. These gears would drive two spools which each send string to opposite sides of the shoulder pulley. A guitar tuner would tension the system and would remove all backlash from the gears.
ConceptFORGE
Wally, GUS Simpson, LISA Simpson, THOR Simpson, Sextupteron, CoreXZ
|
Re: New Here, New Idea July 08, 2014 07:07PM |
Registered: 9 years ago Posts: 8 |
|
Re: New Here, New Idea July 08, 2014 07:24PM |
Registered: 10 years ago Posts: 979 |
Just to be clear... A GUS arm is elbow actuated. One neat thing about the GUS arm is that it has a linear response. You can think of it as a linear actuator. That makes the firmware calculations deal with square roots and no inverse trig functions.
Is there a reason you are sticking with shoulder actuation? Actuating the elbow doesn't mean that the stepper has to be on or close to the elbow.
What are your guiding goals?
ConceptFORGE
Wally, GUS Simpson, LISA Simpson, THOR Simpson, Sextupteron, CoreXZ
Is there a reason you are sticking with shoulder actuation? Actuating the elbow doesn't mean that the stepper has to be on or close to the elbow.
What are your guiding goals?
ConceptFORGE
Wally, GUS Simpson, LISA Simpson, THOR Simpson, Sextupteron, CoreXZ
|
Re: New Here, New Idea July 08, 2014 07:37PM |
Registered: 9 years ago Posts: 8 |
My guiding goals would be:
Grounded motors
Expandable in all directions
Few vitamins
No smooth/threaded rods
No strings
No belts
(Essentially, the only non-printed, mechanical parts would be nuts bolts and screws)
Large horizontal build volume (why I'm not just using a delta)
Little to no framework/housing (why I'm not just using a cartesian)
This list is not complete of course, but it's a good indication of where I'm going with this.
I'm not willing to go for elbow actuation because it introduces strings and tension springs, If I could be directed to a design which uses only mechanical linkages, I'd be grateful.
Would it be possible to redesign the GUS arm to fit the above?
Grounded motors
Expandable in all directions
Few vitamins
No smooth/threaded rods
No strings
No belts
(Essentially, the only non-printed, mechanical parts would be nuts bolts and screws)
Large horizontal build volume (why I'm not just using a delta)
Little to no framework/housing (why I'm not just using a cartesian)
This list is not complete of course, but it's a good indication of where I'm going with this.
I'm not willing to go for elbow actuation because it introduces strings and tension springs, If I could be directed to a design which uses only mechanical linkages, I'd be grateful.
Would it be possible to redesign the GUS arm to fit the above?
|
Re: New Here, New Idea July 08, 2014 08:00PM |
Registered: 10 years ago Posts: 979 |
If you aren't going to use belts, strings, or lead screws then you don't really have a lot left. I am not aware of a fully printed solution that would be backlash free and would get the 1:50 mechanical advantage that you would likely need. (Gears will always have backlash and good harmonic drives would be near impossible to accurately print.)
Once you figure out how you will get a printed solution that is backlash free and has a mechanical advantage in the 25-50 range, that will inform the rest of your design. I wish I could help you here but the best I have uses string. (Springs are not needed with string drives.) Any ideas?
I could probably come up with some linkages that could get you a slight mechanical advantage but the fact remains that the stepper only has 200 to 400 divisions and any linkage won't use more than one rotations. That leaves it so that resolution or work area suffers. So you need the stepper to rotate a few times. That leaves gears, harmonic, cycloidal, belts, strings, etc.
ConceptFORGE
Wally, GUS Simpson, LISA Simpson, THOR Simpson, Sextupteron, CoreXZ
Once you figure out how you will get a printed solution that is backlash free and has a mechanical advantage in the 25-50 range, that will inform the rest of your design. I wish I could help you here but the best I have uses string. (Springs are not needed with string drives.) Any ideas?
I could probably come up with some linkages that could get you a slight mechanical advantage but the fact remains that the stepper only has 200 to 400 divisions and any linkage won't use more than one rotations. That leaves it so that resolution or work area suffers. So you need the stepper to rotate a few times. That leaves gears, harmonic, cycloidal, belts, strings, etc.
ConceptFORGE
Wally, GUS Simpson, LISA Simpson, THOR Simpson, Sextupteron, CoreXZ
|
Re: New Here, New Idea July 08, 2014 08:29PM |
Registered: 9 years ago Posts: 8 |
All right, well sticking to the inverted 2 axis delta idea seems like an option, do you think it is? As in, would it work? To my knowledge, it would only have are resolution issue.
If not, or even if so. would you recommend perusing the GUS arms? Including string, would it yield significantly better results?
If not, or even if so. would you recommend perusing the GUS arms? Including string, would it yield significantly better results?
|
Re: New Here, New Idea July 08, 2014 09:04PM |
Registered: 9 years ago Posts: 8 |
Looking back through the forums, I have found two variants of the Simpson that I'd be happy with applying to my design.
RDGUS and SPUD Simpson.
Mentioned here:
[forums.reprap.org]
[forums.reprap.org]
I'm more inclined to go for an adapted SPUD.
Seeing as you are the creator, would you say it could work?
I think it would be well suited to a two axis adaptation.
RDGUS and SPUD Simpson.
Mentioned here:
[forums.reprap.org]
[forums.reprap.org]
I'm more inclined to go for an adapted SPUD.
Seeing as you are the creator, would you say it could work?
I think it would be well suited to a two axis adaptation.
|
Re: New Here, New Idea July 08, 2014 09:25PM |
Registered: 10 years ago Posts: 979 |
RDGUS adds a lot of costs so I would put that on the back burner.
The next generation GUS arm that I am going to release in the next month would be my top pick due to the mathematical savings you will get in the firmware. The current GUS arm would already be a great solution for this. (The leveling linkage will be a bit crazy but doable.)
SPUD would also go a good choice. However, I would change up the design a little to get some more resolution. I would use the same technique I talked about for the 1-arm SCARA. Gear up two separate spools that drive the big pulley.
You should read all of this post. It intersects what you want to do.
This is one way to cheaply keep the hot end vertical.
ConceptFORGE
Wally, GUS Simpson, LISA Simpson, THOR Simpson, Sextupteron, CoreXZ
The next generation GUS arm that I am going to release in the next month would be my top pick due to the mathematical savings you will get in the firmware. The current GUS arm would already be a great solution for this. (The leveling linkage will be a bit crazy but doable.)
SPUD would also go a good choice. However, I would change up the design a little to get some more resolution. I would use the same technique I talked about for the 1-arm SCARA. Gear up two separate spools that drive the big pulley.
You should read all of this post. It intersects what you want to do.
{kind=link}
This is one way to cheaply keep the hot end vertical.
ConceptFORGE
Wally, GUS Simpson, LISA Simpson, THOR Simpson, Sextupteron, CoreXZ
|
Re: New Here, New Idea July 09, 2014 01:11AM |
Registered: 9 years ago Posts: 8 |
Ah yes, I remember seeing this thread not too long ago.
Definitely some good information for me there. Keep me updated on the new GUS arm! Until then, I'll continue exploring the use of adapted SPUD arms. Although I am yet to grasp your 1-arm SCARA concept, got a diagram lying around? As for head levelling, I'd like to limit the use or string, the one string method above is great, but do you know of any other way I could do it?
Definitely some good information for me there. Keep me updated on the new GUS arm! Until then, I'll continue exploring the use of adapted SPUD arms. Although I am yet to grasp your 1-arm SCARA concept, got a diagram lying around? As for head levelling, I'd like to limit the use or string, the one string method above is great, but do you know of any other way I could do it?
Sorry, only registered users may post in this forum.