Delta robot extruder / sorter - building from scratch
Posted by Arnix
|
Re: Delta robot extruder / sorter - building from scratch May 23, 2018 07:31AM |
Registered: 6 years ago Posts: 71 |
You have to install some sort of z-endstop on your toolhead. Then send G1 S1 Zxxxx . That S1 paprameter lowers the z-axis until the endstop triggers.
*** OK. Got it. What kind of vacuum pump would you suggest for this kind of setup ? It must be some industrial grade because it will work 24 / 7..
The G-, M- or T- command must be at the start of the line (unless you are sending line numbers too) but the parameters can be in any order.
*** OK. I saw that there is one product on your site, that would do the trick regarding height measurements
[miscsolutions.wordpress.com]
Arnix
Edited 1 time(s). Last edit at 05/23/2018 07:40AM by Arnix.
*** OK. Got it. What kind of vacuum pump would you suggest for this kind of setup ? It must be some industrial grade because it will work 24 / 7..
The G-, M- or T- command must be at the start of the line (unless you are sending line numbers too) but the parameters can be in any order.
*** OK. I saw that there is one product on your site, that would do the trick regarding height measurements
[miscsolutions.wordpress.com]
Arnix
Edited 1 time(s). Last edit at 05/23/2018 07:40AM by Arnix.
|
Re: Delta robot extruder / sorter - building from scratch May 23, 2018 12:36PM |
Registered: 8 years ago Posts: 5,232 |
Quote
What kind of vacuum pump would you suggest
You said something about 70grams and I don't know, if you will always be able to hit the part at the center of gravity? A pick&place pump might be too small?
I'm a bit lost here. A compressor running backwards or with reversed valves maybe?
|
Re: Delta robot extruder / sorter - building from scratch May 30, 2018 02:14PM |
Registered: 6 years ago Posts: 71 |
HI guys !
I could not reply sooner.
I played a bit with duet board and its working great but i dont know how to turn all three motors at once.
Basically i can control each of those 3 motors but i can run them altogether ( eg. to pull all arms up or down at the same time ).
Air pump
- you are on right track :-) the idea is still the same i just need to find away how to make this.
- end of the pump will have silicon based part and the pump will be devided to 3 intake parts ( well, this is the
main idea for now ).
- so, when object is located, stronger push down will be executes and silicone should fit quite good...
- well this just an idea...
Arnix
I could not reply sooner.
I played a bit with duet board and its working great but i dont know how to turn all three motors at once.
Basically i can control each of those 3 motors but i can run them altogether ( eg. to pull all arms up or down at the same time ).
Air pump
- you are on right track :-) the idea is still the same i just need to find away how to make this.
- end of the pump will have silicon based part and the pump will be devided to 3 intake parts ( well, this is the
main idea for now ).
- so, when object is located, stronger push down will be executes and silicone should fit quite good...
- well this just an idea...
Arnix
|
Re: Delta robot extruder / sorter - building from scratch May 30, 2018 03:20PM |
Registered: 10 years ago Posts: 14,672 |
Have you used the tool at reprapfirmware.org to generate a config.g file for your delta printer, and uploaded it to your machine? If so, then after homing the machine you can use G1 Z commands to move the effector up and down.
Large delta printer [miscsolutions.wordpress.com], E3D tool changer, Robotdigg SCARA printer, Crane Quad and Ormerod
Disclosure: I design Duet electronics and work on RepRapFirmware, [duet3d.com].
Large delta printer [miscsolutions.wordpress.com], E3D tool changer, Robotdigg SCARA printer, Crane Quad and Ormerod
Disclosure: I design Duet electronics and work on RepRapFirmware, [duet3d.com].
|
Re: Delta robot extruder / sorter - building from scratch May 31, 2018 02:37AM |
Registered: 8 years ago Posts: 5,232 |
|
Re: Delta robot extruder / sorter - building from scratch May 31, 2018 04:09AM |
Registered: 6 years ago Posts: 71 |
Config file:
- we made basic test and its working but maybe we are doing something wrong.
It looks like it's not started from home position. We have to drive them to z+100 and them motors start to spin.
When we send G1 Z then it returns them to HOME position. So basically, i can not start from home position
but i can return to it. Btw. we need to implement endstops and this is first thing to do :-)
There is no delta machine ready, am having just some basic model made with aluminum rods and U profiles.
I can move model it in any direction, just like some "real" model but it's just "model", and without motors :-).
I will send some photos afternoon.
The test we are making right now is just basic test with three motors pulled out of printers :-)
---------------------------------------------------------------------------------------------------------------------------
Btw. i dont want to jump from one topic to other but what do you think, what kind of material should be used for joints ?
At the moment am using iron joints like the one in the link. In the future am thinking to use the same automatic oil lubricant system....
[www.essentracomponents.com.au]
Arnix
Edited 2 time(s). Last edit at 05/31/2018 04:29AM by Arnix.
- we made basic test and its working but maybe we are doing something wrong.
It looks like it's not started from home position. We have to drive them to z+100 and them motors start to spin.
When we send G1 Z then it returns them to HOME position. So basically, i can not start from home position
but i can return to it. Btw. we need to implement endstops and this is first thing to do :-)
There is no delta machine ready, am having just some basic model made with aluminum rods and U profiles.
I can move model it in any direction, just like some "real" model but it's just "model", and without motors :-).
I will send some photos afternoon.
The test we are making right now is just basic test with three motors pulled out of printers :-)
---------------------------------------------------------------------------------------------------------------------------
Btw. i dont want to jump from one topic to other but what do you think, what kind of material should be used for joints ?
At the moment am using iron joints like the one in the link. In the future am thinking to use the same automatic oil lubricant system....
[www.essentracomponents.com.au]
Arnix
Edited 2 time(s). Last edit at 05/31/2018 04:29AM by Arnix.
|
Re: Delta robot extruder / sorter - building from scratch May 31, 2018 04:48AM |
Registered: 8 years ago Posts: 5,232 |
Quote
Config file:
- we made basic test and its working but maybe we are doing something wrong.
It looks like it's not started from home position. We have to drive them to z+100 and them motors start to spin.
When we send G1 Z then it returns them to HOME position. So basically, i can not start from home position
but i can return to it. Btw. we need to implement endstops and this is first thing to do :-)
You could manually move the axis' to the top and send G92 Z#### ( whatever your max height will be ) It's like homing the printer without endstops....
|
Re: Delta robot extruder / sorter - building from scratch May 31, 2018 04:58AM |
Registered: 8 years ago Posts: 5,232 |
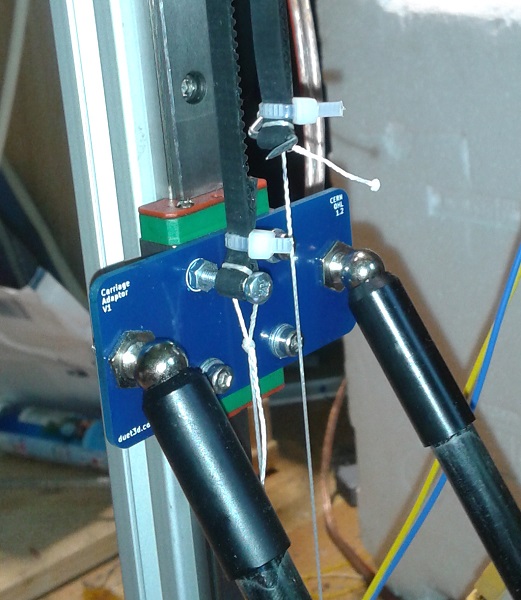
Make sure, those cupped joints allow enough angle. You'll probably need +/-45°.
The largest angle can be realized with magnetic ball studs. They are also less critical when the toolheads runs into something. The magnets just popp off.
The picture shows Haydn Huntleys Delrin Mag arms with 10mm OD CF-rods mounted to dc42's smart effector carrier PCBs.
The largest angle can be realized with magnetic ball studs. They are also less critical when the toolheads runs into something. The magnets just popp off.
The picture shows Haydn Huntleys Delrin Mag arms with 10mm OD CF-rods mounted to dc42's smart effector carrier PCBs.
|
Re: Delta robot extruder / sorter - building from scratch May 31, 2018 05:59AM |
Registered: 6 years ago Posts: 71 |
|
Re: Delta robot extruder / sorter - building from scratch May 31, 2018 01:33PM |
Registered: 8 years ago Posts: 5,232 |
|
Re: Delta robot extruder / sorter - building from scratch June 07, 2018 10:13AM |
Registered: 6 years ago Posts: 71 |
Hi Guys !
Am terrible sorry i could not reply sooner.
We are building new HW for our robot so am spending much time with this...
Before i forget. are the stepper motors that i ordered in range or some servomotors , regarding speed and setup ?
Am asking this because i want to calculate some max real working speed.
Can we except something in this range :
[www.youtube.com]
Am terrible sorry i could not reply sooner.
We are building new HW for our robot so am spending much time with this...
Before i forget. are the stepper motors that i ordered in range or some servomotors , regarding speed and setup ?
Am asking this because i want to calculate some max real working speed.
Can we except something in this range :
[www.youtube.com]
|
Re: Delta robot extruder / sorter - building from scratch June 08, 2018 02:43AM |
Registered: 8 years ago Posts: 5,232 |
|
Re: Delta robot extruder / sorter - building from scratch June 08, 2018 06:47AM |
Registered: 6 years ago Posts: 71 |
Woah, that's fast. I'm afraid you have to live with ~50% speed of this.
*** :-) yea, thats fast, but it looks so damn nice :-)
*** am just wondering, if i use motors that i bought ( the same as yours ), and if i setup some gear system, would it be possible to upscale this 50% to let's say, 70 % ? :-)
Higher voltages:
** If i remember correctly, DC_42 has mentioned somethign of external driver board that can be hooked up to DUET, to gain higher voltages ?. Maybe i messed something...
Are you planning to use the same motion system? That's not a Delta, kinematic_wise.
*** We aer in planing / testing phase so we can setup similar or different system. What do you mean when you say that this is not kinematic wise ?
How do you know that ?
Arnix !
*** :-) yea, thats fast, but it looks so damn nice :-)
*** am just wondering, if i use motors that i bought ( the same as yours ), and if i setup some gear system, would it be possible to upscale this 50% to let's say, 70 % ? :-)
Higher voltages:
** If i remember correctly, DC_42 has mentioned somethign of external driver board that can be hooked up to DUET, to gain higher voltages ?. Maybe i messed something...
Are you planning to use the same motion system? That's not a Delta, kinematic_wise.
*** We aer in planing / testing phase so we can setup similar or different system. What do you mean when you say that this is not kinematic wise ?
How do you know that ?
Arnix !
|
Re: Delta robot extruder / sorter - building from scratch June 09, 2018 02:23AM |
Registered: 8 years ago Posts: 5,232 |
Quote
What do you mean when you say that this is not kinematic wise ?
How do you know that ?
On a Delta, the carriers are driven linear, but in the video the servos use rotating arms ( sin/cos factors ) to drive the rods.
Re: DuetWifi and external drivers: It's right, but you paid so much for the onboard drivers, it's a shame, not to use them....
As I mentioned earlier, the 6-wire NEMA23 can be wired in two different ways, which works like a gear already.
|
Re: Delta robot extruder / sorter - building from scratch June 14, 2018 08:20AM |
Registered: 6 years ago Posts: 71 |
Hi O_Lampe !
We created new test version ( look at the link ).
[ibb.co]
Joints will be removed and changed with some other solution, but for testing purposes, it should be enough.
Biceps is 33 cm and rod is 100 cm, but this will be also changed to 50 x 80 cm or 60 x 70cm...
Whole three rods + head, weight 1,8 kg but the head alone has 450 grams ( head will be completely redesigned and final weight will be around 100 grams)
All together will be catted to around 1kg ( 300 grams per arm ).
Till now, college has tested the DUET on printer stepper motors. now am planing to test it on nema23.
Can you tell me how should i connect the motors ( or do i need to measure the resistance ) ?
I have:
- red
- black
- green
- white
- yellow
- blue
I didn't create end stops but am planning to do this in a day or two...
So, any security warning is more then welcome :-)
Best regards !
Arnix
Edited 2 time(s). Last edit at 06/14/2018 09:22AM by Arnix.
We created new test version ( look at the link ).
[ibb.co]
Joints will be removed and changed with some other solution, but for testing purposes, it should be enough.
Biceps is 33 cm and rod is 100 cm, but this will be also changed to 50 x 80 cm or 60 x 70cm...
Whole three rods + head, weight 1,8 kg but the head alone has 450 grams ( head will be completely redesigned and final weight will be around 100 grams)
All together will be catted to around 1kg ( 300 grams per arm ).
Till now, college has tested the DUET on printer stepper motors. now am planing to test it on nema23.
Can you tell me how should i connect the motors ( or do i need to measure the resistance ) ?
I have:
- red
- black
- green
- white
- yellow
- blue
I didn't create end stops but am planning to do this in a day or two...
So, any security warning is more then welcome :-)
Best regards !
Arnix
Edited 2 time(s). Last edit at 06/14/2018 09:22AM by Arnix.
|
Re: Delta robot extruder / sorter - building from scratch June 15, 2018 03:07AM |
Registered: 8 years ago Posts: 5,232 |
|
Re: Delta robot extruder / sorter - building from scratch June 15, 2018 03:58AM |
Registered: 6 years ago Posts: 71 |
Now I know, what you meant with "biceps and forearm"
** :-)
Maybe dumb question but how should i calculate steps/mm if i dont have belt or lead screw drive ?
Biceps is directly connected to motor.
Motor connection :
Green - Black --> one phase
Red - Blue --> second phase (coil)
Yellow, white unconnected.
This should do it....
Endstop:
Am planning to use this approach:
[cdn.instructables.com]
I think this could be OK for duet ?
Arnix
Edited 1 time(s). Last edit at 06/15/2018 03:58AM by Arnix.
** :-)
Maybe dumb question but how should i calculate steps/mm if i dont have belt or lead screw drive ?
Biceps is directly connected to motor.
Motor connection :
Green - Black --> one phase
Red - Blue --> second phase (coil)
Yellow, white unconnected.
This should do it....
Endstop:
Am planning to use this approach:
[cdn.instructables.com]
I think this could be OK for duet ?
Arnix
Edited 1 time(s). Last edit at 06/15/2018 03:58AM by Arnix.
|
Re: Delta robot extruder / sorter - building from scratch June 15, 2018 05:29AM |
Registered: 8 years ago Posts: 5,232 |
|
Re: Delta robot extruder / sorter - building from scratch June 15, 2018 09:11AM |
Registered: 6 years ago Posts: 71 |
That's what I metioned earlier: It's not pure Delta kinematics, but adds some sin/cos coefficients to it.
*** So, what would you do in my case. I can rearrange this part but am not quite sure how and why is this necessery.
Maybe this can be configured in config file ( dc_42 ? )
A.
Edited 1 time(s). Last edit at 06/15/2018 09:38AM by Arnix.
*** So, what would you do in my case. I can rearrange this part but am not quite sure how and why is this necessery.
Maybe this can be configured in config file ( dc_42 ? )
A.
Edited 1 time(s). Last edit at 06/15/2018 09:38AM by Arnix.
|
Re: Delta robot extruder / sorter - building from scratch June 15, 2018 11:26AM |
Registered: 8 years ago Posts: 5,232 |
|
Re: Delta robot extruder / sorter - building from scratch June 15, 2018 01:51PM |
Registered: 6 years ago Posts: 71 |
The worst thing about this config is the low resolution. The steppers would rotate ~140° ( 78 full steps) for the whole travel of about 60cm.
*** What is your suggestion for correct this ?. If necessary i can change the HW i just need to understand / know how.
1,8 x 78 = 140 degrees --> OK
How did you get 60 cm ?
*** What is your suggestion for correct this ?. If necessary i can change the HW i just need to understand / know how.
1,8 x 78 = 140 degrees --> OK
How did you get 60 cm ?
|
Re: Delta robot extruder / sorter - building from scratch June 16, 2018 01:45AM |
Registered: 8 years ago Posts: 5,232 |
|
Re: Delta robot extruder / sorter - building from scratch June 16, 2018 06:54AM |
Registered: 10 years ago Posts: 14,672 |
That's not a linear delta, it's a rotary delta. the firmware for the Duets (reprapFirmware) doesn't yet support rotary delta kinematics.
I share o_lampe's concern about the low resolution. I have never built a rotary delta, but am wondering whether shorter rods would help. The ones I have seen in pictures have rods about twice a long as the rotary arms.
Large delta printer [miscsolutions.wordpress.com], E3D tool changer, Robotdigg SCARA printer, Crane Quad and Ormerod
Disclosure: I design Duet electronics and work on RepRapFirmware, [duet3d.com].
|
Re: Delta robot extruder / sorter - building from scratch June 16, 2018 02:25PM |
Registered: 6 years ago Posts: 71 |
I can add belt or lead screw...
1.) What setup would be better for my situation, belt or lead screw.
I have read somewhere that belt is for faster speeds, but i dont know if belt is good choice for my situation ?
I think screw system could be better choice, and simpler to implement ?
2.) Is there any chance that rotary firmware would be ready in two months :-) ?
Arnix
Edited 4 time(s). Last edit at 06/16/2018 03:06PM by Arnix.
1.) What setup would be better for my situation, belt or lead screw.
I have read somewhere that belt is for faster speeds, but i dont know if belt is good choice for my situation ?
I think screw system could be better choice, and simpler to implement ?
2.) Is there any chance that rotary firmware would be ready in two months :-) ?
Arnix
Edited 4 time(s). Last edit at 06/16/2018 03:06PM by Arnix.
|
Re: Delta robot extruder / sorter - building from scratch June 17, 2018 01:41AM |
Registered: 8 years ago Posts: 5,232 |
I think a leadscrew attached to the 'elbow' would work. But I don't know, if you have enough workspace for that.
You'd choose ballscrews for their better speed capabilities.
But before you buy or built anything, you should calculate and simulate it virtually. ( that's the engineers way )
You'd choose ballscrews for their better speed capabilities.
But before you buy or built anything, you should calculate and simulate it virtually. ( that's the engineers way )
|
Re: Delta robot extruder / sorter - building from scratch June 17, 2018 10:45AM |
Registered: 6 years ago Posts: 71 |
I think a lead screw attached to the 'elbow' would work. But I don't know, if you have enough workspace for that.
--> i have space, i can do that. That was original idea but my goal was the robot that i have showed before.
I think i will stick with rotary design for now. Btw. do i need dome encoder if there will be power losts or something like that ?
I found this one : [eu.mouser.com]
Simulation :
:-) i second that , but am more practical guy :-),10 times through wall and eleventh time through door :-).
Everything will be simulated in solidworks but i have to wait cca one month for that... So, why wasting time:-)
I saw few rotary designs and they working quite well.
This one is quite interesting ( with gearbox )
[www.youtube.com]
Others:
[www.youtube.com]
[www.youtube.com]
------------------------------------------------------------------------------------
Like you wrote,maybe duet can be configured on that way
before firmware will be updated...
Arnix
Edited 4 time(s). Last edit at 06/18/2018 10:09AM by Arnix.
--> i have space, i can do that. That was original idea but my goal was the robot that i have showed before.
I think i will stick with rotary design for now. Btw. do i need dome encoder if there will be power losts or something like that ?
I found this one : [eu.mouser.com]
Simulation :
:-) i second that , but am more practical guy :-),10 times through wall and eleventh time through door :-).
Everything will be simulated in solidworks but i have to wait cca one month for that... So, why wasting time:-)
I saw few rotary designs and they working quite well.
This one is quite interesting ( with gearbox )
[www.youtube.com]
Others:
[www.youtube.com]
[www.youtube.com]
------------------------------------------------------------------------------------
Like you wrote,maybe duet can be configured on that way
before firmware will be updated...
Arnix
Edited 4 time(s). Last edit at 06/18/2018 10:09AM by Arnix.

{kind=link}
{kind=link}
Sorry, only registered users may post in this forum.