Please help for getting proper firmware for this
Posted by Saurabh Lanje
|
Please help for getting proper firmware for this November 17, 2013 07:56AM |
Registered: 10 years ago Posts: 27 |
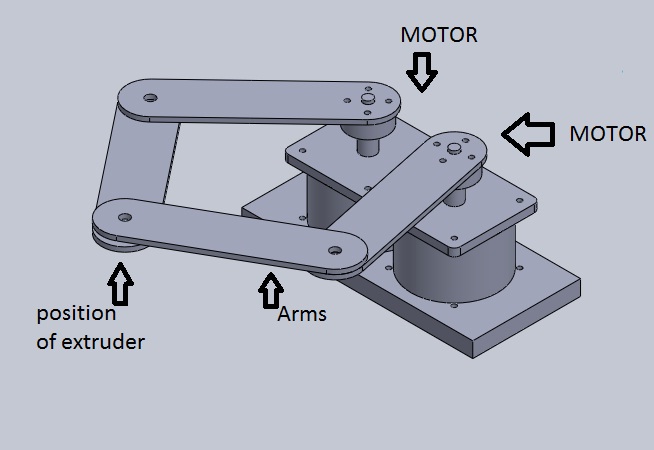
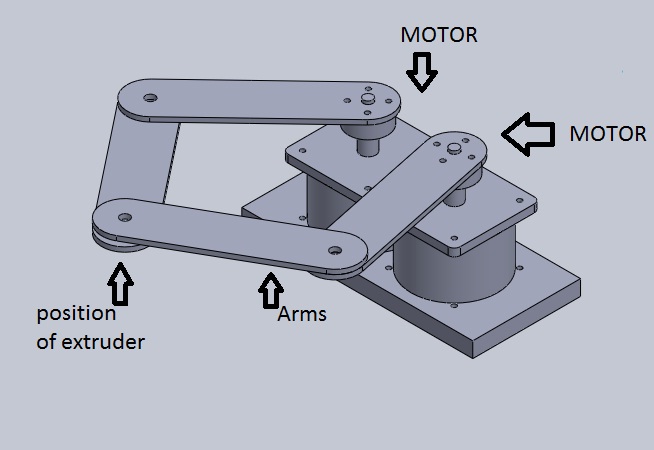
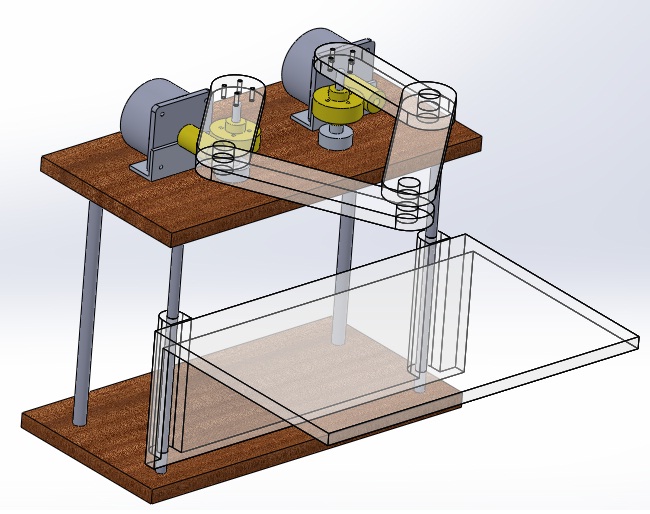
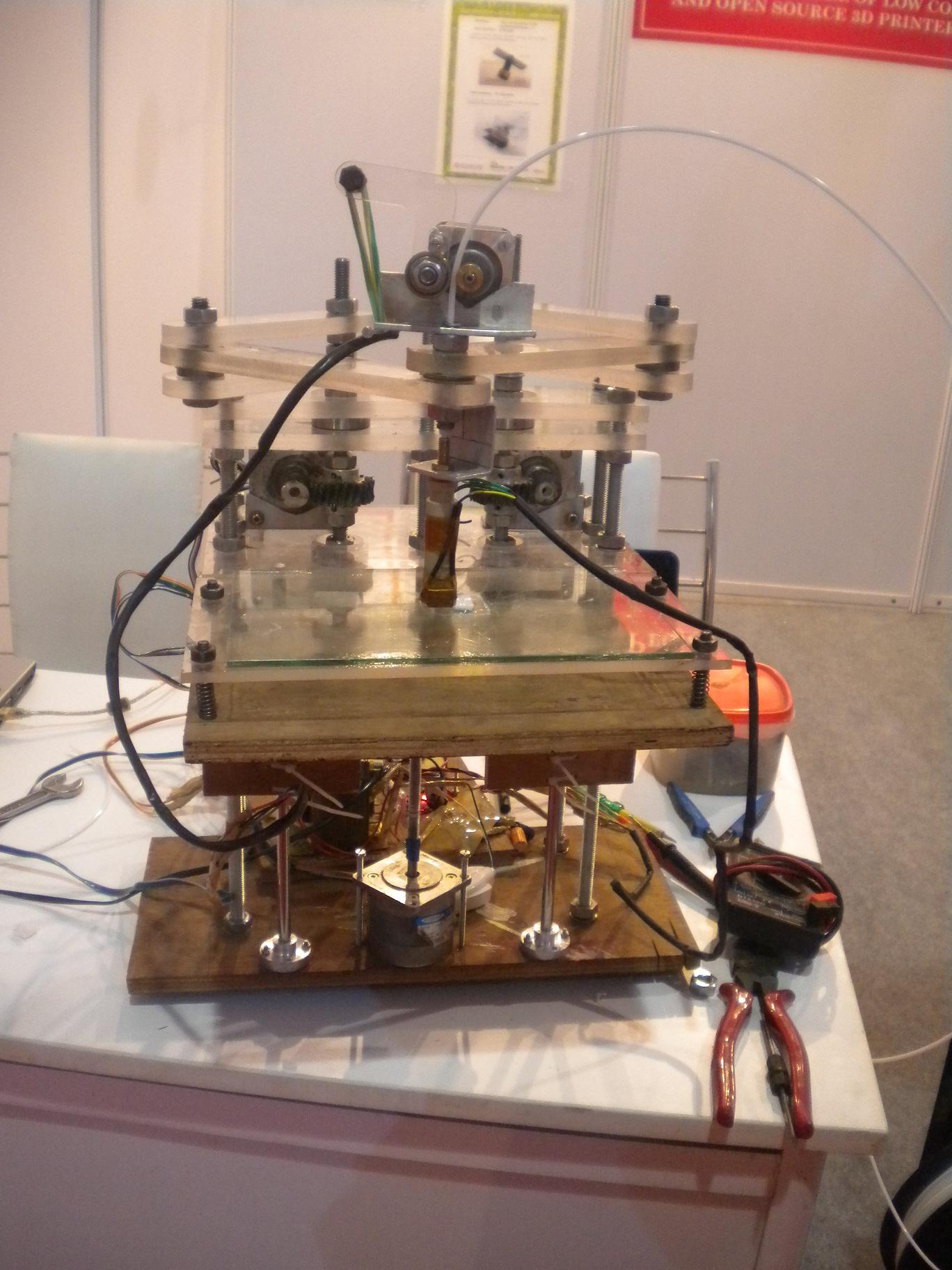
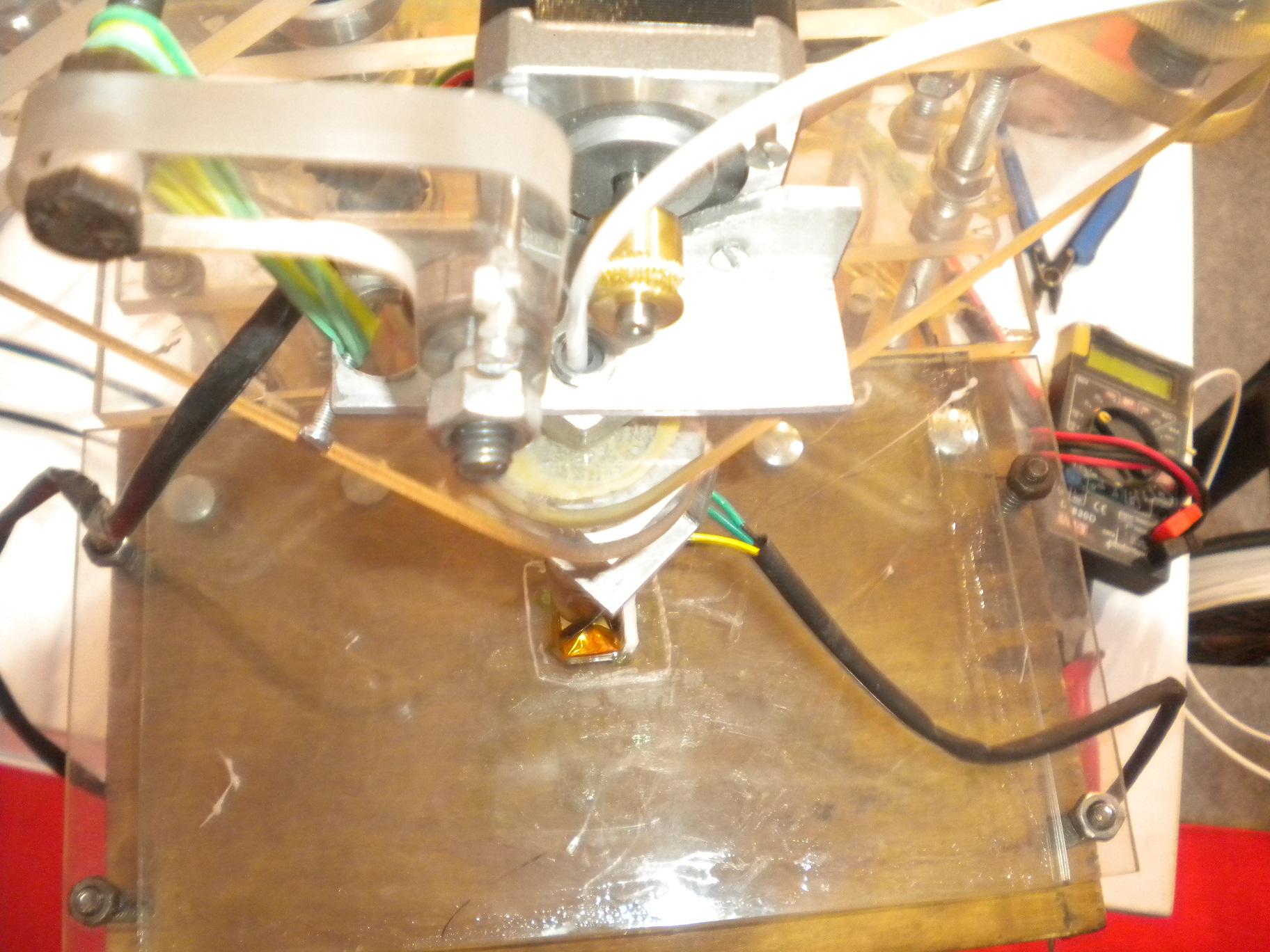
I have started working on this design,this is only initial design, but unfortunately i dont know how to modify existing firmwares for this 3d printer. Attached figure shows mechanism for motion in x and y direction only.....please tell me about what to do with firmware issue.
thanks in advance
thanks in advance
|
Re: Please help for getting proper firmware for this November 17, 2013 12:03PM |
Registered: 11 years ago Posts: 1,049 |

|
Re: Please help for getting proper firmware for this November 17, 2013 03:27PM |
Registered: 10 years ago Posts: 1,381 |

|
Re: Please help for getting proper firmware for this November 17, 2013 11:11PM |
Registered: 10 years ago Posts: 979 |
@Saurabh Lanje: If you grab some firmware like Marlin with delta support then you can replace the coordinate transformation function with your own.
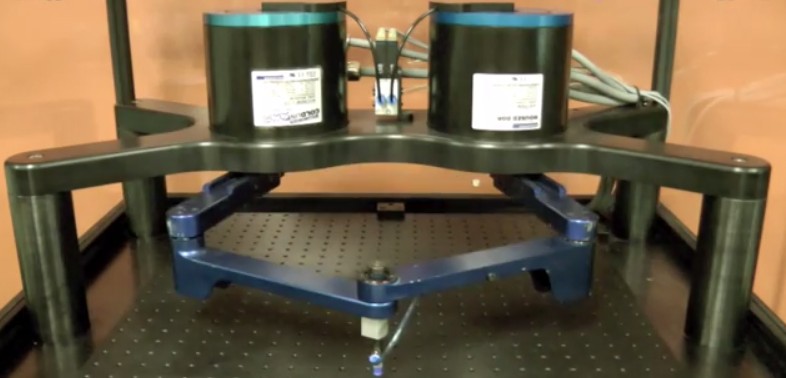
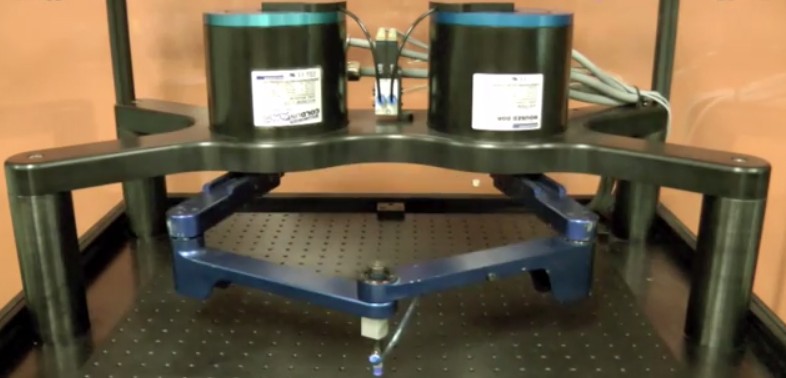
I believe that as drawn your design will have a very limited build area. The main problem will be from the singularity you get when the forearms are co-linear. The DexTAR above sets a high bar by having a very smart control system. It's path planning has to make sure that momentum will carry the machine through a singularity. I would love to see something like this for 3D printing but as you can imagine it would require heavily modified firmware.
I believe that as drawn your design will have a very limited build area. The main problem will be from the singularity you get when the forearms are co-linear. The DexTAR above sets a high bar by having a very smart control system. It's path planning has to make sure that momentum will carry the machine through a singularity. I would love to see something like this for 3D printing but as you can imagine it would require heavily modified firmware.
|
Re: Please help for getting proper firmware for this November 18, 2013 01:02AM |
Registered: 10 years ago Posts: 27 |
@nicholas.seward
Thanks for reply
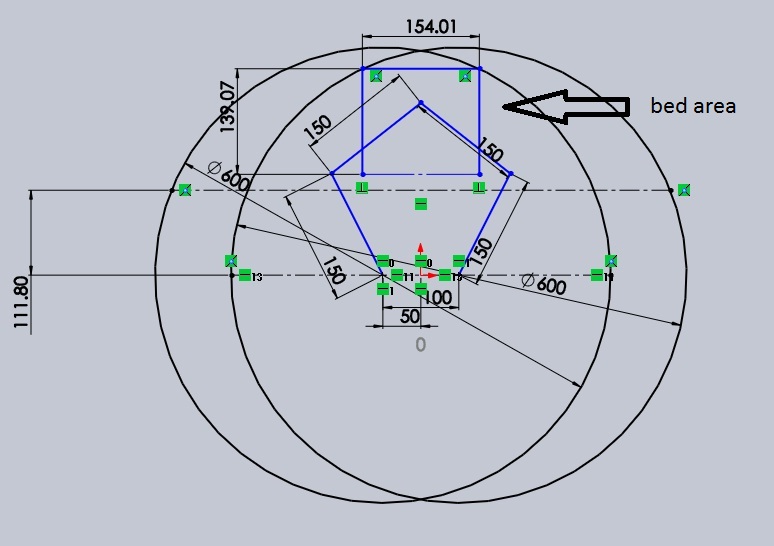
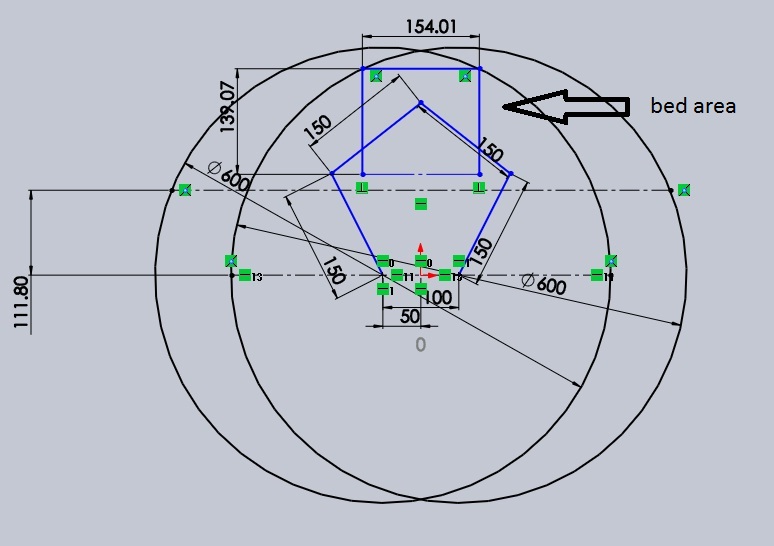
I am have designed the bed area such that it will never have pass such condition of singularity. attached images shows the dimensional details of arms from top view.
1st fig show that the arms are in such conditions when the extrudewr come below level in y direction. so i have reduced bed area. it is shown in fig. In this bed area such condition never arises.the bed area is very less as it can be seen from fig. Even it will be lesser than that shown in figures. It ok for me
Edited 1 time(s). Last edit at 11/18/2013 01:05AM by Saurabh Lanje.
Thanks for reply
I am have designed the bed area such that it will never have pass such condition of singularity. attached images shows the dimensional details of arms from top view.
1st fig show that the arms are in such conditions when the extrudewr come below level in y direction. so i have reduced bed area. it is shown in fig. In this bed area such condition never arises.the bed area is very less as it can be seen from fig. Even it will be lesser than that shown in figures. It ok for me
Edited 1 time(s). Last edit at 11/18/2013 01:05AM by Saurabh Lanje.
|
Re: Please help for getting proper firmware for this November 18, 2013 02:26AM |
Registered: 10 years ago Posts: 979 |
@Saurabh Lanje: Nice! I just wanted to make sure you were aware of the limitations and you are.
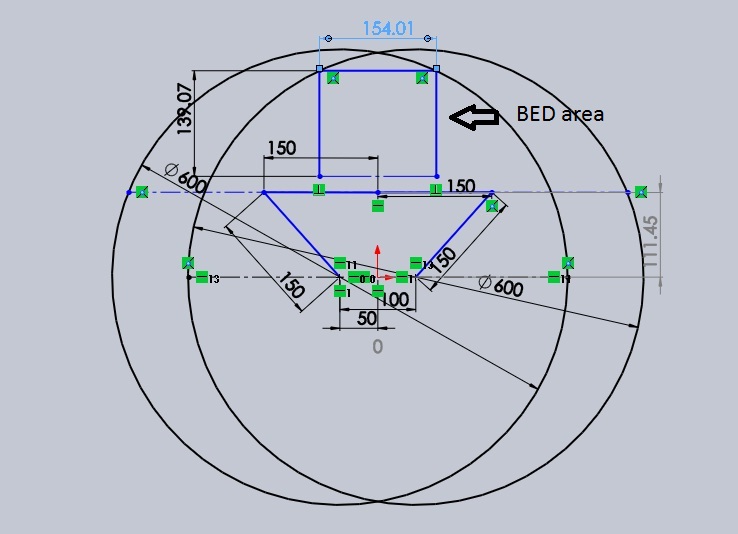
You might want to consider making it so that the motor arms lengths plus the distance between the motors sum to be the same as the combined length of the forearms. You can see in the diagram that it moves your envelope closer in. I drew the rectangle with an optimized area. If you want a square area then the biggest one for this arrangement is 162x162mm.
You can also get access to both sides without any singularities if you can give each link its own level which will cause you to get real creative with motor mounting and filament routing. That is probably out of the scope of what you want to do.
Edited 1 time(s). Last edit at 11/18/2013 02:27AM by nicholas.seward.

You might want to consider making it so that the motor arms lengths plus the distance between the motors sum to be the same as the combined length of the forearms. You can see in the diagram that it moves your envelope closer in. I drew the rectangle with an optimized area. If you want a square area then the biggest one for this arrangement is 162x162mm.
You can also get access to both sides without any singularities if you can give each link its own level which will cause you to get real creative with motor mounting and filament routing. That is probably out of the scope of what you want to do.
Edited 1 time(s). Last edit at 11/18/2013 02:27AM by nicholas.seward.
|
Re: Please help for getting proper firmware for this November 19, 2013 08:44AM |
Registered: 10 years ago Posts: 27 |
@nicholas.seward
Thats great......hence i can increase bed area even more......thanks for such great idea......i will definitely implement that.......currenty i am trying to stude morgan firmware to modify it. i Will it be better to study marlin firmware or delta firmware?
Edited 1 time(s). Last edit at 11/19/2013 08:46AM by Saurabh Lanje.
Thats great......hence i can increase bed area even more......thanks for such great idea......i will definitely implement that.......currenty i am trying to stude morgan firmware to modify it. i Will it be better to study marlin firmware or delta firmware?
Edited 1 time(s). Last edit at 11/19/2013 08:46AM by Saurabh Lanje.
|
Re: Please help for getting proper firmware for this November 23, 2013 11:18PM |
Registered: 10 years ago Posts: 27 |
|
Re: Please help for getting proper firmware for this November 27, 2013 05:26AM |
Registered: 10 years ago Posts: 27 |
|
Re: Please help for getting proper firmware for this November 27, 2013 05:41AM |
Registered: 10 years ago Posts: 1,381 |

|
Re: Please help for getting proper firmware for this November 27, 2013 07:02AM |
Registered: 10 years ago Posts: 27 |
|
Re: Please help for getting proper firmware for this November 27, 2013 08:33PM |
Registered: 10 years ago Posts: 1,381 |

@ Saurabh Lanje
It might be simpler to use decorative aluminum C-channel and angle stock to mount and align the motors and worm drive.
You could also use PVC channel/angles (guttters?) or wood to create a box structure to mount the hardware.
This would allow you to support the end of the worm and the worm wheel.
At minimum I would suggest adding a cross bar to the top of the two worm wheels as you have drawn.
This would help reduce flexing.
Edited 2 time(s). Last edit at 11/27/2013 08:37PM by A2.
|
Re: Please help for getting proper firmware for this December 03, 2013 07:59AM |
Registered: 10 years ago Posts: 27 |
|
Re: Please help for getting proper firmware for this December 13, 2013 06:36PM |
Registered: 10 years ago Posts: 1,381 |

Printable Parallel SCARA first print
Published on Nov 15, 2012
[www.youtube.com]
First ever print in the world (as far as I know) from a 3D-printable parallel SCARA 3D printer.
Edited 1 time(s). Last edit at 12/13/2013 06:36PM by A2.
|
Re: Please help for getting proper firmware for this December 13, 2013 09:15PM |
Registered: 10 years ago Posts: 27 |
|
Re: Please help for getting proper firmware for this September 03, 2014 11:21AM |
Registered: 10 years ago Posts: 27 |
|
Re: Please help for getting proper firmware for this September 03, 2014 11:34AM |
Registered: 11 years ago Posts: 177 |
|
Re: Please help for getting proper firmware for this September 04, 2014 08:29AM |
Registered: 10 years ago Posts: 27 |
|
Re: Please help for getting proper firmware for this September 04, 2014 06:15PM |
Registered: 10 years ago Posts: 1,381 |
|
Re: Please help for getting proper firmware for this September 06, 2014 12:03PM |
Registered: 10 years ago Posts: 27 |
|
Re: Please help for getting proper firmware for this September 06, 2014 12:04PM |
Registered: 10 years ago Posts: 27 |
|
Re: Please help for getting proper firmware for this September 09, 2014 09:41AM |
Registered: 11 years ago Posts: 177 |
We're you able to remove from the firmware the initial arm movement that causes the arms to collide upon startup? Are all the modifications needed in the marlin_main.cpp file?
[scara3dprinter.wordpress.com]
[scara3dprinter.wordpress.com]
|
Re: Please help for getting proper firmware for this September 10, 2014 12:17PM |
Registered: 10 years ago Posts: 27 |
|
Re: Please help for getting proper firmware for this September 10, 2014 12:18PM |
Registered: 10 years ago Posts: 27 |
|
Re: Please help for getting proper firmware for this September 10, 2014 12:33PM |
Registered: 11 years ago Posts: 177 |
|
Re: Please help for getting proper firmware for this September 12, 2014 04:57AM |
Registered: 10 years ago Posts: 27 |
|
Re: Please help for getting proper firmware for this September 12, 2014 11:21AM |
Registered: 11 years ago Posts: 177 |
I am still confused. Can you copy and paste what you did in that part of the code and post it on the forum?
[scara3dprinter.wordpress.com]
[scara3dprinter.wordpress.com]
|
Re: Please help for getting proper firmware for this September 23, 2014 11:45AM |
Registered: 10 years ago Posts: 27 |
case 113://for debuging(Saurabh)
/* add homing algorithm here
start homing of x and y together
and after that start homing of z axis
when all axis are homed properly set co ordinates
X_STEP_PIN 14
X_DIR_PIN 11
Y_STEP_PIN 22
Y_DIR_PIN 23
Z_STEP_PIN 3
Z_DIR_PIN 2
pinMode(X_MIN_PIN, INPUT);
pinMode(Y_MIN_PIN, INPUT);
pinMode(Z_MIN_PIN, INPUT);
digitalWrite(Z_STEP_PIN, HIGH);
digitalWrite(Z_STEP_PIN, LOW);
pinMode(buttonPin, INPUT);
*/
//Z HOMING
/*
digitalWrite(Z_DIR_PIN, LOW);
digitalWrite(Z_ENABLE_PIN, LOW);
while(1)
{
_delay_us(100);
digitalWrite(Z_STEP_PIN, HIGH);
_delay_us(100);
if(digitalRead(Z_MIN_PIN)==LOW)
{
digitalWrite(Z_ENABLE_PIN, HIGH);
break;
}
digitalWrite(Z_STEP_PIN, LOW);
}
*/
/*
//X HOMING
digitalWrite(X_DIR_PIN, HIGH);
digitalWrite(X_ENABLE_PIN, LOW);
while(1)
{
_delay_us(100);
digitalWrite(X_STEP_PIN, HIGH);
_delay_us(100);
if(digitalRead(X_MIN_PIN)==LOW)
{
digitalWrite(X_ENABLE_PIN, HIGH);
break;
}
digitalWrite(X_STEP_PIN, LOW);
}
//Y HOMING
//X HOMING
digitalWrite(Y_DIR_PIN, HIGH);
digitalWrite(Y_ENABLE_PIN, LOW);
while(1)
{
_delay_us(100);
digitalWrite(Y_STEP_PIN, HIGH);
_delay_us(100);
if(digitalRead(Y_MIN_PIN)==LOW)
{
digitalWrite(Y_ENABLE_PIN, HIGH);
break;
}
digitalWrite(Y_STEP_PIN, LOW);
}
*/
//XY HOME TOGTHER
digitalWrite(Y_DIR_PIN, HIGH);
digitalWrite(Y_ENABLE_PIN, LOW);
digitalWrite(X_DIR_PIN, HIGH);
digitalWrite(X_ENABLE_PIN, LOW);
while(1)
{
_delay_us(100);
digitalWrite(Y_STEP_PIN, HIGH);
digitalWrite(X_STEP_PIN, HIGH);
_delay_us(100);
if(digitalRead(Y_MIN_PIN)==HIGH)
{
digitalWrite(Y_STEP_PIN, LOW);
}
if(digitalRead(X_MIN_PIN)==HIGH)
{
digitalWrite(X_STEP_PIN, LOW);
}
if(digitalRead(X_MIN_PIN)==LOW&&digitalRead(Y_MIN_PIN)==LOW)
{
digitalWrite(X_ENABLE_PIN, HIGH);
digitalWrite(Y_DIR_PIN, HIGH);
for(i=0;i<4992;i++)
{
_delay_us(100);
digitalWrite(Y_STEP_PIN, HIGH);
_delay_us(100);
digitalWrite(Y_STEP_PIN, LOW);
}
break;
}
}
SERIAL_PROTOCOLPGM("X motor homming completed");
SERIAL_PROTOCOLPGM("Enter m116 for homing Y motor");
break;
case 116:
digitalWrite(Y_DIR_PIN, LOW);
digitalWrite(Y_ENABLE_PIN, LOW);
for(i=0;i<9984;i++)
{
_delay_us(100);
digitalWrite(Y_STEP_PIN, HIGH);
_delay_us(100);
digitalWrite(Y_STEP_PIN, LOW);
}
digitalWrite(Y_ENABLE_PIN, HIGH);
plan_set_position(current_scara_x_position,current_scara_y_position,0,0);
st_synchronize();
break;
/* add homing algorithm here
start homing of x and y together
and after that start homing of z axis
when all axis are homed properly set co ordinates
X_STEP_PIN 14
X_DIR_PIN 11
Y_STEP_PIN 22
Y_DIR_PIN 23
Z_STEP_PIN 3
Z_DIR_PIN 2
pinMode(X_MIN_PIN, INPUT);
pinMode(Y_MIN_PIN, INPUT);
pinMode(Z_MIN_PIN, INPUT);
digitalWrite(Z_STEP_PIN, HIGH);
digitalWrite(Z_STEP_PIN, LOW);
pinMode(buttonPin, INPUT);
*/
//Z HOMING
/*
digitalWrite(Z_DIR_PIN, LOW);
digitalWrite(Z_ENABLE_PIN, LOW);
while(1)
{
_delay_us(100);
digitalWrite(Z_STEP_PIN, HIGH);
_delay_us(100);
if(digitalRead(Z_MIN_PIN)==LOW)
{
digitalWrite(Z_ENABLE_PIN, HIGH);
break;
}
digitalWrite(Z_STEP_PIN, LOW);
}
*/
/*
//X HOMING
digitalWrite(X_DIR_PIN, HIGH);
digitalWrite(X_ENABLE_PIN, LOW);
while(1)
{
_delay_us(100);
digitalWrite(X_STEP_PIN, HIGH);
_delay_us(100);
if(digitalRead(X_MIN_PIN)==LOW)
{
digitalWrite(X_ENABLE_PIN, HIGH);
break;
}
digitalWrite(X_STEP_PIN, LOW);
}
//Y HOMING
//X HOMING
digitalWrite(Y_DIR_PIN, HIGH);
digitalWrite(Y_ENABLE_PIN, LOW);
while(1)
{
_delay_us(100);
digitalWrite(Y_STEP_PIN, HIGH);
_delay_us(100);
if(digitalRead(Y_MIN_PIN)==LOW)
{
digitalWrite(Y_ENABLE_PIN, HIGH);
break;
}
digitalWrite(Y_STEP_PIN, LOW);
}
*/
//XY HOME TOGTHER
digitalWrite(Y_DIR_PIN, HIGH);
digitalWrite(Y_ENABLE_PIN, LOW);
digitalWrite(X_DIR_PIN, HIGH);
digitalWrite(X_ENABLE_PIN, LOW);
while(1)
{
_delay_us(100);
digitalWrite(Y_STEP_PIN, HIGH);
digitalWrite(X_STEP_PIN, HIGH);
_delay_us(100);
if(digitalRead(Y_MIN_PIN)==HIGH)
{
digitalWrite(Y_STEP_PIN, LOW);
}
if(digitalRead(X_MIN_PIN)==HIGH)
{
digitalWrite(X_STEP_PIN, LOW);
}
if(digitalRead(X_MIN_PIN)==LOW&&digitalRead(Y_MIN_PIN)==LOW)
{
digitalWrite(X_ENABLE_PIN, HIGH);
digitalWrite(Y_DIR_PIN, HIGH);
for(i=0;i<4992;i++)
{
_delay_us(100);
digitalWrite(Y_STEP_PIN, HIGH);
_delay_us(100);
digitalWrite(Y_STEP_PIN, LOW);
}
break;
}
}
SERIAL_PROTOCOLPGM("X motor homming completed");
SERIAL_PROTOCOLPGM("Enter m116 for homing Y motor");
break;
case 116:
digitalWrite(Y_DIR_PIN, LOW);
digitalWrite(Y_ENABLE_PIN, LOW);
for(i=0;i<9984;i++)
{
_delay_us(100);
digitalWrite(Y_STEP_PIN, HIGH);
_delay_us(100);
digitalWrite(Y_STEP_PIN, LOW);
}
digitalWrite(Y_ENABLE_PIN, HIGH);
plan_set_position(current_scara_x_position,current_scara_y_position,0,0);
st_synchronize();
break;
|
Re: Please help for getting proper firmware for this September 23, 2014 11:46AM |
Registered: 10 years ago Posts: 27 |
|
Re: Please help for getting proper firmware for this September 23, 2014 11:51AM |
Registered: 10 years ago Posts: 27 |
m113 starts moving the links towards end stops, the links stop when they touch the end stops.
the end stop position must be selected such that it should be out of working zone of 3d printer,or it must be extreme of links.
angle by which each link should move to reach cartesian origin of bed area is calculated and put in the code. by this angle each motor is moved after homing the link to extreme positions.
the end stop position must be selected such that it should be out of working zone of 3d printer,or it must be extreme of links.
angle by which each link should move to reach cartesian origin of bed area is calculated and put in the code. by this angle each motor is moved after homing the link to extreme positions.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Sorry, only registered users may post in this forum.