VitaminRad's Marlin and other SCARA Firmware problems
Posted by Power3DPrinting
|
VitaminRad's Marlin and other SCARA Firmware problems March 11, 2018 09:34PM |
Registered: 6 years ago Posts: 58 |
Hi, so it seems the SCARA branch of the RepRap forums is a bit of a dessert but update on machine, it is mechanically stable but the firmware is a nightmare. I downloaded and configured VitaminRad's Marlin version but outside of homing xyz so long as I leave the z probe turned off, there's not much else that I can get it to do as it ignores all the move commands it is given over pronterface. I left an attatchment of my config files hopefully someone here can point out some obvious thing I missed that is stopping any commands from going through.
So about my machine, it is my development of the RepRap Helios with a similar homing position, print area, and bed leveling probe. I've done all I could to the config.h and config_adv.h files but without any known way of accessing the actual inverse kinematics or homing commands/orientation, there isn't much I can do. Programming has always been my weakside but juggling just these two files and a bunch of cosmetic files here and there feels like Marlin handicaps its development for those that don't want to be trapped inside a box. Any help is much appreciated, sorry for my frustrations but fewer things are more torturous than having only half the key to solving the puzzle. I've probably buried my nose too deep in this project to figure out how to get my machine to just simply move.
So about my machine, it is my development of the RepRap Helios with a similar homing position, print area, and bed leveling probe. I've done all I could to the config.h and config_adv.h files but without any known way of accessing the actual inverse kinematics or homing commands/orientation, there isn't much I can do. Programming has always been my weakside but juggling just these two files and a bunch of cosmetic files here and there feels like Marlin handicaps its development for those that don't want to be trapped inside a box. Any help is much appreciated, sorry for my frustrations but fewer things are more torturous than having only half the key to solving the puzzle. I've probably buried my nose too deep in this project to figure out how to get my machine to just simply move.
|
Re: VitaminRad's Marlin and other SCARA Firmware problems March 12, 2018 12:27AM |
Registered: 6 years ago Posts: 58 |
|
Re: VitaminRad's Marlin and other SCARA Firmware problems March 12, 2018 06:21AM |
Registered: 8 years ago Posts: 76 |
hello,
when I started my Single Arm project, I didn't found any fonctional Marlin firmware so I started from scratch with Marlin 1.0...
The result of my first proto is here: https://github.com/invent2main/s2a/tree/master/ArmOni-solo/Firmware/proto1
At the exception of calibration (M360, ...) it perfectly works like you can see: https://vimeo.com/232471834
if you use a Mega+Ramps+REPRAP_DISCOUNT_FULL_GRAPHIC_SMART_CONTROLLER, you just have to modify parameters (offset, homing, ...) in order to match your mechanics; particularly the kinematics/inverse in Marlin_Main.cpp:
void calculate_SCARA_forward_Transform(... // Perform forward kinematics
void calculate_delta(... // Inverse kinematics
good luck
when I started my Single Arm project, I didn't found any fonctional Marlin firmware so I started from scratch with Marlin 1.0...
The result of my first proto is here: https://github.com/invent2main/s2a/tree/master/ArmOni-solo/Firmware/proto1
At the exception of calibration (M360, ...) it perfectly works like you can see: https://vimeo.com/232471834
if you use a Mega+Ramps+REPRAP_DISCOUNT_FULL_GRAPHIC_SMART_CONTROLLER, you just have to modify parameters (offset, homing, ...) in order to match your mechanics; particularly the kinematics/inverse in Marlin_Main.cpp:
void calculate_SCARA_forward_Transform(... // Perform forward kinematics
void calculate_delta(... // Inverse kinematics
good luck
|
Re: VitaminRad's Marlin and other SCARA Firmware problems March 12, 2018 08:00PM |
Registered: 6 years ago Posts: 58 |
|
Re: VitaminRad's Marlin and other SCARA Firmware problems March 13, 2018 01:26AM |
Registered: 6 years ago Posts: 58 |
Great news! I've finished customizing the config.h, homing from pronterface is fantastic and then gives me control of the xyz axis from its interface so for the first time i'm moving onto calibrating things! Also, holy cow you have some cool videos, way to go!
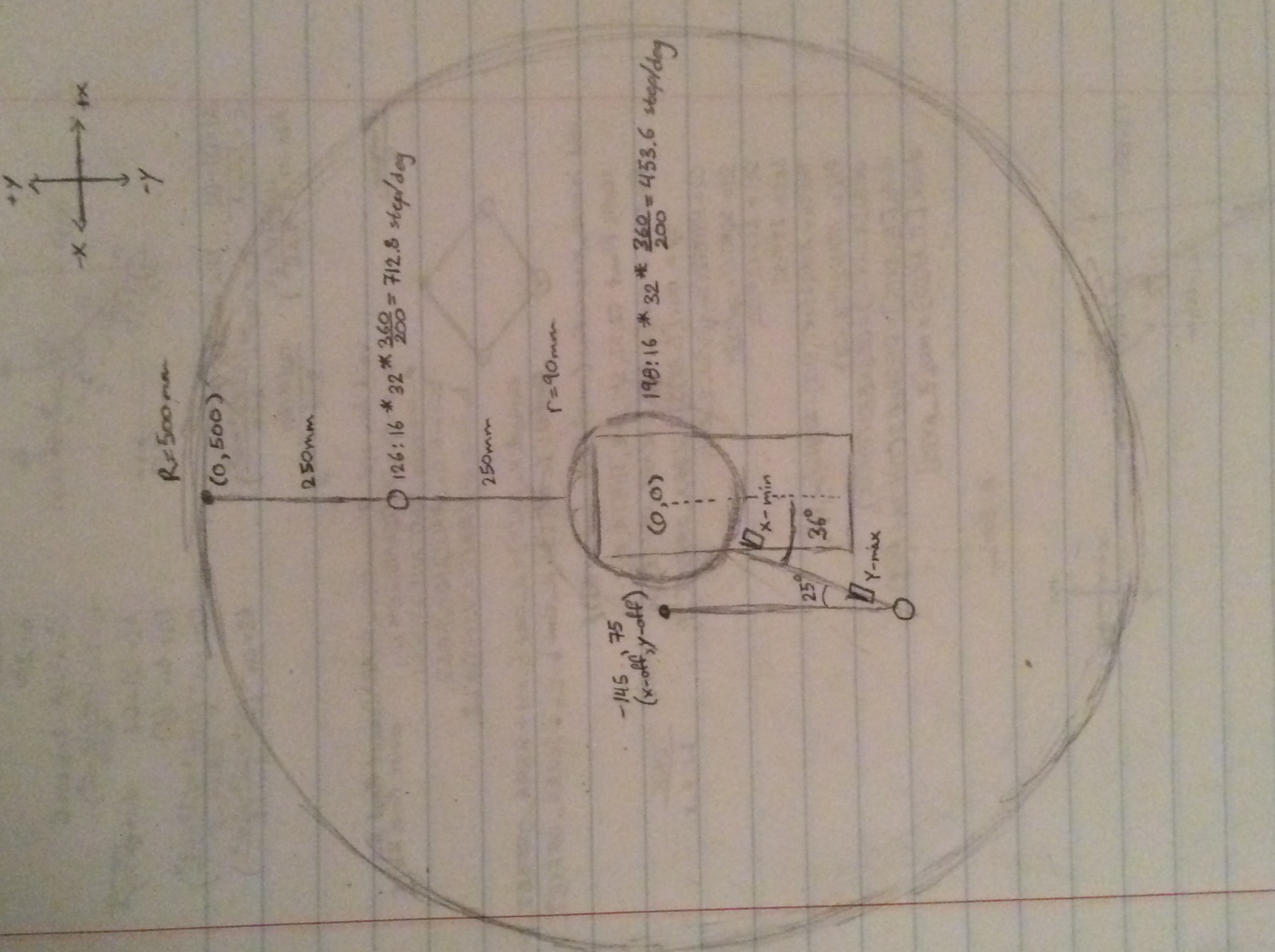
Some bad news, I don't think I understand the config settings as well as I thought I did and it might be a major contributer to why I am struggling with so many different SCARA firmwares. I attatched a sketch of my intended range and orientation, mainly I wanted to check with you or anyone who is interested about some settings because I had to make some changes in excess of 100-700 units. One main problem I am having with the pronterface moves is although both motors turn like they want to move the hotend some where but most of the movements are constrained to rotating clockwise or counter clockwise around the perimeter of the shoulder tower. Not sure how to orientate the arm to move away from the shoulder, probably a bad config edit on my end.
L1=250mm
L2=250mm
X_Offset=-145mm //From shoulder, assuming it is 0,0 for the XY plane
Y_Offset=75mm
Theta_Offset=0
PSI_Offset=0
Steps per degree (712.8, 453.6, 800, 100) //XYZE
X_Max=500
X_Min=-500
Y_Max=500
Y_Min=-500
oh, and I noticed you had an fpos_t error for the LCD so I changed them all to filepos_t in the two sdbase files to compile the machine on Arduino 1.8.5, might get you out of the awkwardness of uploading on an older version of Arduino if you want. Thanks again for the help!!!
Some bad news, I don't think I understand the config settings as well as I thought I did and it might be a major contributer to why I am struggling with so many different SCARA firmwares. I attatched a sketch of my intended range and orientation, mainly I wanted to check with you or anyone who is interested about some settings because I had to make some changes in excess of 100-700 units. One main problem I am having with the pronterface moves is although both motors turn like they want to move the hotend some where but most of the movements are constrained to rotating clockwise or counter clockwise around the perimeter of the shoulder tower. Not sure how to orientate the arm to move away from the shoulder, probably a bad config edit on my end.
L1=250mm
L2=250mm
X_Offset=-145mm //From shoulder, assuming it is 0,0 for the XY plane
Y_Offset=75mm
Theta_Offset=0
PSI_Offset=0
Steps per degree (712.8, 453.6, 800, 100) //XYZE
X_Max=500
X_Min=-500
Y_Max=500
Y_Min=-500
oh, and I noticed you had an fpos_t error for the LCD so I changed them all to filepos_t in the two sdbase files to compile the machine on Arduino 1.8.5, might get you out of the awkwardness of uploading on an older version of Arduino if you want. Thanks again for the help!!!
|
Re: VitaminRad's Marlin and other SCARA Firmware problems March 15, 2018 04:47AM |
Registered: 8 years ago Posts: 76 |
happy to see that it was help you;
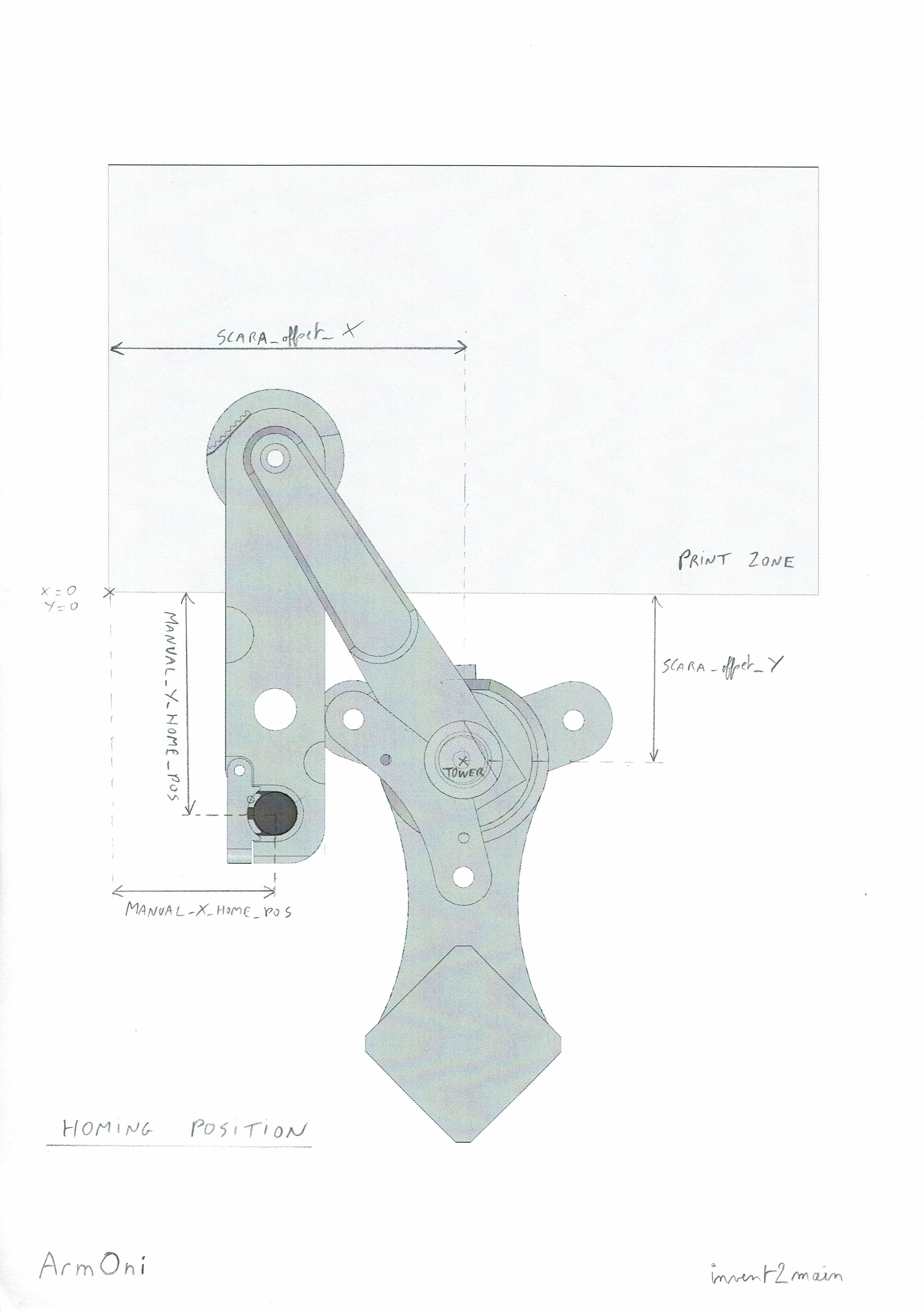
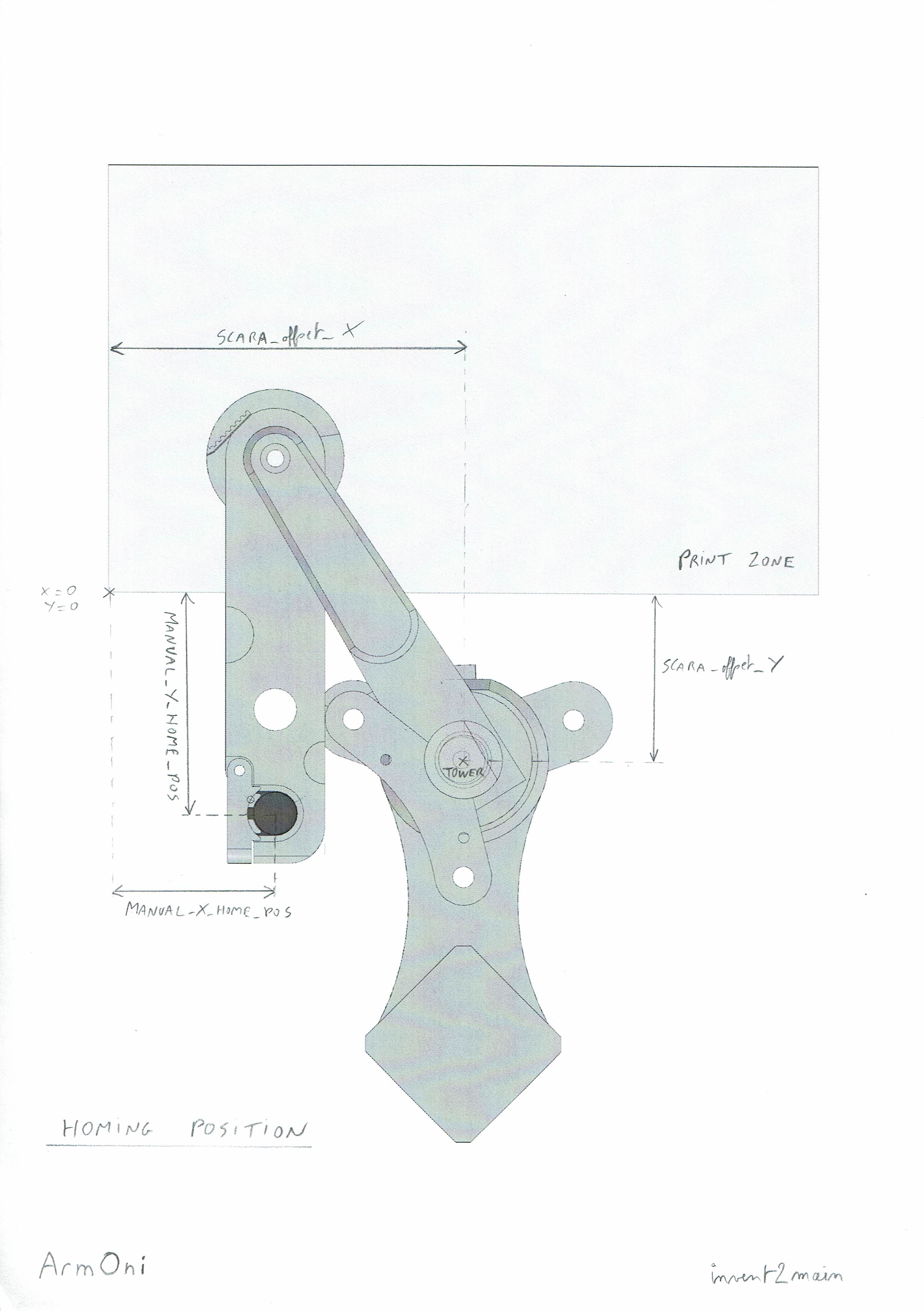
SCARA Configuration of Marlin is not easy and I don't know if you can print all around the 'tower' (base);
if it can help, in attachment you can found how I had understand and configure my prototypes
SCARA Configuration of Marlin is not easy and I don't know if you can print all around the 'tower' (base);
if it can help, in attachment you can found how I had understand and configure my prototypes
|
Re: VitaminRad's Marlin and other SCARA Firmware problems March 30, 2018 03:08PM |
Registered: 6 years ago Posts: 58 |
[www.youtube.com]
First shot at trying to print with your firmware, sorry for the late response I missed the email about your message so I'll go check out your drawing immediately!
Thanks a ton for your help!
First shot at trying to print with your firmware, sorry for the late response I missed the email about your message so I'll go check out your drawing immediately!
Thanks a ton for your help!
|
Re: VitaminRad's Marlin and other SCARA Firmware problems April 07, 2018 08:41PM |
Registered: 6 years ago Posts: 58 |
Hi! do I have your permission to advertise your marlin version to others? I recently redesigned my printer to be right handed to make it more compatible with your firmware as well as others but configuring it is still a challenge, hoping someone passing by might have that golden answer.
I tried following your diagram but it's hard to tell what I am doing is right or wrong. Homing is top notch but moving the Z-axis up has the arm move randomly outward and moving the arm in increments in the Y or X restricts the arm to a very short orbit around its base, at the end, I have no idea where anything is, I'll try to post a video in a little bit to show you what I mean
I tried following your diagram but it's hard to tell what I am doing is right or wrong. Homing is top notch but moving the Z-axis up has the arm move randomly outward and moving the arm in increments in the Y or X restricts the arm to a very short orbit around its base, at the end, I have no idea where anything is, I'll try to post a video in a little bit to show you what I mean
|
Re: VitaminRad's Marlin and other SCARA Firmware problems April 08, 2018 04:54PM |
Registered: 6 years ago Posts: 58 |
[github.com]
This is some Wangsama repetier style firmware, open source and I tried using it myself. I can upload and adjust some settings thanks to the tutorial videos made for it, probably the best documented SCARA firmware out there. I've had my own problems with it but how about giving this a try instead of Mk4Duo and we can work together to get our machines printing.
This is some Wangsama repetier style firmware, open source and I tried using it myself. I can upload and adjust some settings thanks to the tutorial videos made for it, probably the best documented SCARA firmware out there. I've had my own problems with it but how about giving this a try instead of Mk4Duo and we can work together to get our machines printing.
|
Re: VitaminRad's Marlin and other SCARA Firmware problems April 08, 2018 04:55PM |
Registered: 6 years ago Posts: 58 |
|
Re: VitaminRad's Marlin and other SCARA Firmware problems April 09, 2018 09:11AM |
Registered: 8 years ago Posts: 76 |
hello, no problem for sharing; Marlin is open source...
I think you have to modify kinematics for your version; I have seen in your video that the elbow motor is moved by shoulder; in my version motors are fixed, hence the particular kinematics...
what do you have here in Marlin_Main:
void calculate_SCARA_forward_Transform(... // Perform forward kinematics
void calculate_delta(... // Inverse kinematics
I think you have to modify kinematics for your version; I have seen in your video that the elbow motor is moved by shoulder; in my version motors are fixed, hence the particular kinematics...
what do you have here in Marlin_Main:
void calculate_SCARA_forward_Transform(... // Perform forward kinematics
void calculate_delta(... // Inverse kinematics
|
Re: VitaminRad's Marlin and other SCARA Firmware problems April 09, 2018 04:11PM |
Registered: 6 years ago Posts: 58 |
Thanks! Helps clear up my conscious and hmm I'm honestly not sure I understand how our kinematics are different since both have joints in the same places and both your motors move the machine from its own shoulder like mine. Guess I don't nearly understand what I'm doing as much as I had hoped I did. Building a printer is a bundle of a lot more surprises I could have ever dreamed of haha. Okay, I found the forward and inverse kinematics I think you were asking for.
#ifdef SCARA
void calculate_SCARA_forward_Transform(float f_scara[3])
{
// Perform forward kinematics, and place results in delta[3]
// The maths and first version has been done by QHARLEY . Integrated into masterbranch 06/2014 and slightly restructured by Joachim Cerny in June 2014
float x_sin, x_cos, y_sin, y_cos;
//SERIAL_ECHOPGM("f_delta x="); SERIAL_ECHO(f_scara[X_AXIS]);
//SERIAL_ECHOPGM(" y="); SERIAL_ECHO(f_scara[Y_AXIS]);
x_sin = sin(f_scara[X_AXIS]/SCARA_RAD2DEG) * Linkage_1;
x_cos = cos(f_scara[X_AXIS]/SCARA_RAD2DEG) * Linkage_1;
//y_sin = sin(f_scara[Y_AXIS]/SCARA_RAD2DEG) * Linkage_2;
//y_cos = cos(f_scara[Y_AXIS]/SCARA_RAD2DEG) * Linkage_2;
y_sin = sin((f_scara[Y_AXIS]+(f_scara[X_AXIS]*3/4))/SCARA_RAD2DEG) * Linkage_2; //MODIF FOR ARMONI
y_cos = cos((f_scara[Y_AXIS]+(f_scara[X_AXIS]*3/4))/SCARA_RAD2DEG) * Linkage_2; //MODIF FOR ARMONI
// SPos = f_scara[X_AXIS]/SCARA_RAD2DEG;
// EPos = f_scara[Y_AXIS]/SCARA_RAD2DEG;
// SERIAL_ECHOPGM(" x_sin="); SERIAL_ECHO(x_sin);
// SERIAL_ECHOPGM(" x_cos="); SERIAL_ECHO(x_cos);
// SERIAL_ECHOPGM(" y_sin="); SERIAL_ECHO(y_sin);
// SERIAL_ECHOPGM(" y_cos="); SERIAL_ECHOLN(y_cos);
delta[X_AXIS] = x_cos + y_cos + SCARA_offset_x; //theta
delta[Y_AXIS] = x_sin + y_sin + SCARA_offset_y; //theta+phi
// delta[X_AXIS] = Len1*cos(SPos) + Len2*cos(SPos+EPos);
// delta[Y_AXIS] = Len1*sin(SPos) + Len2*sin(SPos+EPos);
// SERIAL_ECHOPGM(" F_delta[X_AXIS]="); SERIAL_ECHO(delta[X_AXIS]);
// SERIAL_ECHOPGM(" F_delta[Y_AXIS]="); SERIAL_ECHOLN(delta[Y_AXIS]);
}
void calculate_delta(float cartesian[3]){
//reverse kinematics.
// Perform reversed kinematics, and place results in delta[3]
// The maths and first version has been done by QHARLEY . Integrated into masterbranch 06/2014 and slightly restructured by Joachim Cerny in June 2014
float SCARA_pos[2];
static float SCARA_C2, SCARA_S2, SCARA_K1, SCARA_K2, SCARA_theta, SCARA_psi;
SCARA_pos[X_AXIS] = cartesian[X_AXIS] * axis_scaling[X_AXIS] - SCARA_offset_x; //Translate SCARA to standard X Y
SCARA_pos[Y_AXIS] = cartesian[Y_AXIS] * axis_scaling[Y_AXIS] - SCARA_offset_y; // With scaling factor.
// if (Linkage_1 == Linkage_2)
SCARA_C2 = ( ( sq(SCARA_pos[X_AXIS]) + sq(SCARA_pos[Y_AXIS]) - (2 * (float)L1_2) ) / (2 * (float)L1_2) );
if (SCARA_C2 > 0.95) { SCARA_C2 = 0.95; }
else if (SCARA_C2 < -0.95) { SCARA_C2 = -0.95; }
SCARA_S2 = sqrt( 1 - sq(SCARA_C2) );
SCARA_K1 = Linkage_1 + Linkage_2 * SCARA_C2;
SCARA_K2 = Linkage_2 * SCARA_S2;
SCARA_theta = ( atan2(SCARA_pos[X_AXIS],SCARA_pos[Y_AXIS])-atan2(SCARA_K1, SCARA_K2) ) * -1;
SCARA_psi = atan2(SCARA_S2,SCARA_C2);
delta[X_AXIS] = SCARA_theta * SCARA_RAD2DEG; // Multiply by 180/Pi - theta is support arm angle
//delta[Y_AXIS] = (SCARA_theta + SCARA_psi) * SCARA_RAD2DEG; // - equal to sub arm angle (inverted motor)
//delta[Y_AXIS] = SCARA_psi * SCARA_RAD2DEG; //
delta[Y_AXIS] = (SCARA_psi + (SCARA_theta/4)) * SCARA_RAD2DEG; //MODIF FOR ARMONI
delta[Z_AXIS] = cartesian[Z_AXIS];
#ifdef SCARA
void calculate_SCARA_forward_Transform(float f_scara[3])
{
// Perform forward kinematics, and place results in delta[3]
// The maths and first version has been done by QHARLEY . Integrated into masterbranch 06/2014 and slightly restructured by Joachim Cerny in June 2014
float x_sin, x_cos, y_sin, y_cos;
//SERIAL_ECHOPGM("f_delta x="); SERIAL_ECHO(f_scara[X_AXIS]);
//SERIAL_ECHOPGM(" y="); SERIAL_ECHO(f_scara[Y_AXIS]);
x_sin = sin(f_scara[X_AXIS]/SCARA_RAD2DEG) * Linkage_1;
x_cos = cos(f_scara[X_AXIS]/SCARA_RAD2DEG) * Linkage_1;
//y_sin = sin(f_scara[Y_AXIS]/SCARA_RAD2DEG) * Linkage_2;
//y_cos = cos(f_scara[Y_AXIS]/SCARA_RAD2DEG) * Linkage_2;
y_sin = sin((f_scara[Y_AXIS]+(f_scara[X_AXIS]*3/4))/SCARA_RAD2DEG) * Linkage_2; //MODIF FOR ARMONI
y_cos = cos((f_scara[Y_AXIS]+(f_scara[X_AXIS]*3/4))/SCARA_RAD2DEG) * Linkage_2; //MODIF FOR ARMONI
// SPos = f_scara[X_AXIS]/SCARA_RAD2DEG;
// EPos = f_scara[Y_AXIS]/SCARA_RAD2DEG;
// SERIAL_ECHOPGM(" x_sin="); SERIAL_ECHO(x_sin);
// SERIAL_ECHOPGM(" x_cos="); SERIAL_ECHO(x_cos);
// SERIAL_ECHOPGM(" y_sin="); SERIAL_ECHO(y_sin);
// SERIAL_ECHOPGM(" y_cos="); SERIAL_ECHOLN(y_cos);
delta[X_AXIS] = x_cos + y_cos + SCARA_offset_x; //theta
delta[Y_AXIS] = x_sin + y_sin + SCARA_offset_y; //theta+phi
// delta[X_AXIS] = Len1*cos(SPos) + Len2*cos(SPos+EPos);
// delta[Y_AXIS] = Len1*sin(SPos) + Len2*sin(SPos+EPos);
// SERIAL_ECHOPGM(" F_delta[X_AXIS]="); SERIAL_ECHO(delta[X_AXIS]);
// SERIAL_ECHOPGM(" F_delta[Y_AXIS]="); SERIAL_ECHOLN(delta[Y_AXIS]);
}
void calculate_delta(float cartesian[3]){
//reverse kinematics.
// Perform reversed kinematics, and place results in delta[3]
// The maths and first version has been done by QHARLEY . Integrated into masterbranch 06/2014 and slightly restructured by Joachim Cerny in June 2014
float SCARA_pos[2];
static float SCARA_C2, SCARA_S2, SCARA_K1, SCARA_K2, SCARA_theta, SCARA_psi;
SCARA_pos[X_AXIS] = cartesian[X_AXIS] * axis_scaling[X_AXIS] - SCARA_offset_x; //Translate SCARA to standard X Y
SCARA_pos[Y_AXIS] = cartesian[Y_AXIS] * axis_scaling[Y_AXIS] - SCARA_offset_y; // With scaling factor.
// if (Linkage_1 == Linkage_2)
SCARA_C2 = ( ( sq(SCARA_pos[X_AXIS]) + sq(SCARA_pos[Y_AXIS]) - (2 * (float)L1_2) ) / (2 * (float)L1_2) );
if (SCARA_C2 > 0.95) { SCARA_C2 = 0.95; }
else if (SCARA_C2 < -0.95) { SCARA_C2 = -0.95; }
SCARA_S2 = sqrt( 1 - sq(SCARA_C2) );
SCARA_K1 = Linkage_1 + Linkage_2 * SCARA_C2;
SCARA_K2 = Linkage_2 * SCARA_S2;
SCARA_theta = ( atan2(SCARA_pos[X_AXIS],SCARA_pos[Y_AXIS])-atan2(SCARA_K1, SCARA_K2) ) * -1;
SCARA_psi = atan2(SCARA_S2,SCARA_C2);
delta[X_AXIS] = SCARA_theta * SCARA_RAD2DEG; // Multiply by 180/Pi - theta is support arm angle
//delta[Y_AXIS] = (SCARA_theta + SCARA_psi) * SCARA_RAD2DEG; // - equal to sub arm angle (inverted motor)
//delta[Y_AXIS] = SCARA_psi * SCARA_RAD2DEG; //
delta[Y_AXIS] = (SCARA_psi + (SCARA_theta/4)) * SCARA_RAD2DEG; //MODIF FOR ARMONI
delta[Z_AXIS] = cartesian[Z_AXIS];
|
Re: VitaminRad's Marlin and other SCARA Firmware problems April 10, 2018 03:43AM |
Registered: 8 years ago Posts: 76 |
it's my fault, I didnt wrote a lot of comments in the modified code (it's a "work in progress", for tests); choice of kinematics depend of your design...
just change y in the forward kinematics:
y_sin = sin(f_scara[Y_AXIS]/SCARA_RAD2DEG) * Linkage_2; // classical SCARA style
y_cos = cos(f_scara[Y_AXIS]/SCARA_RAD2DEG) * Linkage_2; // classical SCARA style
//y_sin = sin((f_scara[Y_AXIS]+(f_scara[X_AXIS]*3/4))/SCARA_RAD2DEG) * Linkage_2; //MODIF FOR ARMONI
//y_cos = cos((f_scara[Y_AXIS]+(f_scara[X_AXIS]*3/4))/SCARA_RAD2DEG) * Linkage_2; //MODIF FOR ARMONI
for inverse kinematics you need the second Delta(Y):
//delta[Y_AXIS] = (SCARA_theta + SCARA_psi) * SCARA_RAD2DEG; // Morgan style
delta[Y_AXIS] = SCARA_psi * SCARA_RAD2DEG; // classical SCARA style
//delta[Y_AXIS] = (SCARA_psi + (SCARA_theta/4)) * SCARA_RAD2DEG; //MODIF FOR ARMONI (s2a)
just change y in the forward kinematics:
y_sin = sin(f_scara[Y_AXIS]/SCARA_RAD2DEG) * Linkage_2; // classical SCARA style
y_cos = cos(f_scara[Y_AXIS]/SCARA_RAD2DEG) * Linkage_2; // classical SCARA style
//y_sin = sin((f_scara[Y_AXIS]+(f_scara[X_AXIS]*3/4))/SCARA_RAD2DEG) * Linkage_2; //MODIF FOR ARMONI
//y_cos = cos((f_scara[Y_AXIS]+(f_scara[X_AXIS]*3/4))/SCARA_RAD2DEG) * Linkage_2; //MODIF FOR ARMONI
for inverse kinematics you need the second Delta(Y):
//delta[Y_AXIS] = (SCARA_theta + SCARA_psi) * SCARA_RAD2DEG; // Morgan style
delta[Y_AXIS] = SCARA_psi * SCARA_RAD2DEG; // classical SCARA style
//delta[Y_AXIS] = (SCARA_psi + (SCARA_theta/4)) * SCARA_RAD2DEG; //MODIF FOR ARMONI (s2a)
|
Re: VitaminRad's Marlin and other SCARA Firmware problems April 10, 2018 10:59AM |
Registered: 6 years ago Posts: 58 |
Thank you so much!!! No worries about it, I'm just incredibly grateful for your help, this project means a great to me and I'm not sure what I would have done without you 
I just finished commenting out the changes, I must admit now that I see it you have a very handy system for different kinematics. I'll go test things out and let you know how it goes!
I just finished commenting out the changes, I must admit now that I see it you have a very handy system for different kinematics. I'll go test things out and let you know how it goes!
|
Scara 3D Printer -- Need help setting up Marlin firmware June 19, 2018 03:41PM |
Registered: 5 years ago Posts: 11 |
Hi
I just joined the forum
i really need some help.
i am building a scara 3d printer, i think it's really cool.
i have built 4 3d printers, cartesian style using marlin firmware for ultimaker 2 and they all run well )
but now i am not sure what the parameters should be using the firmware for marlin with scara.
i am somewhat confused.
I am looking also at wangamas, but it seems that there are no pins files for my controller board, i am using the ultimaker 2 board.
so i want to use vitaminRads firmware.
i realise that wangamas firmware uses angles to input as the settings,
Can someone please help.
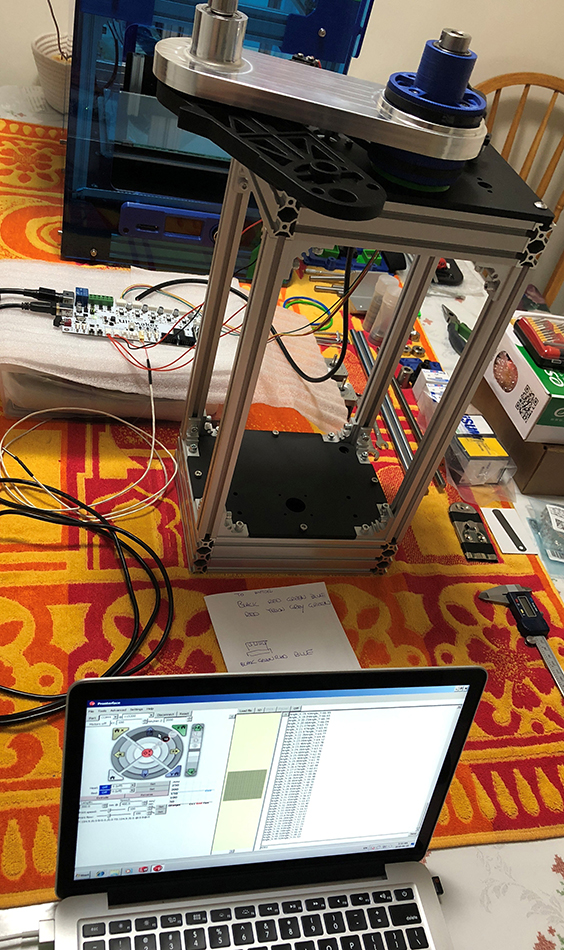
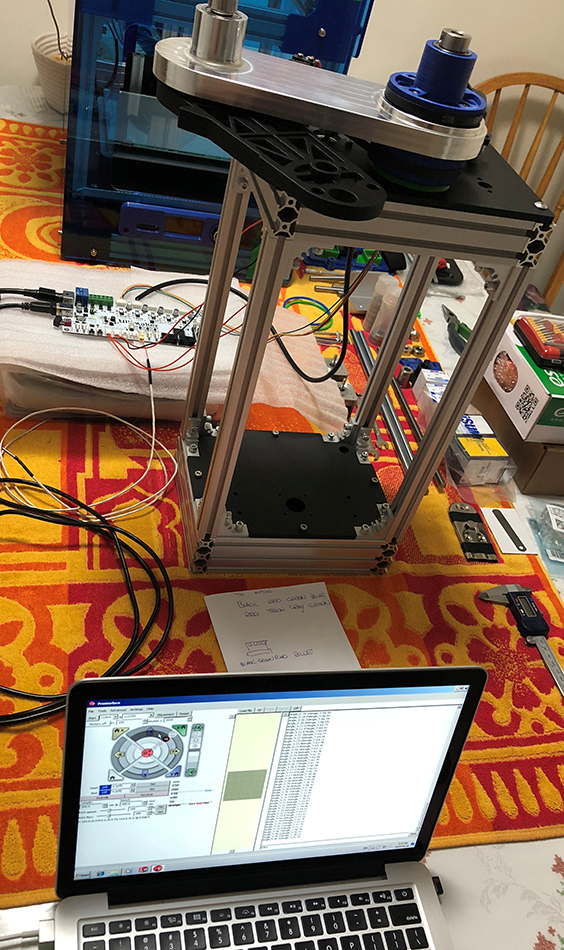
i have attached a top view Cad drawing and a real picture as of today.
my endstops are located as shown in drawing, and my prefered bed center location. ( is this acceptable )
but i dont understand what the tower offsets from bed center should be , also homing locations.
At the moment just want to test the motors and endstops to make sure everything works fine , before i add the other components
Nozzle, heatbed, controller board mounts , display, etc.
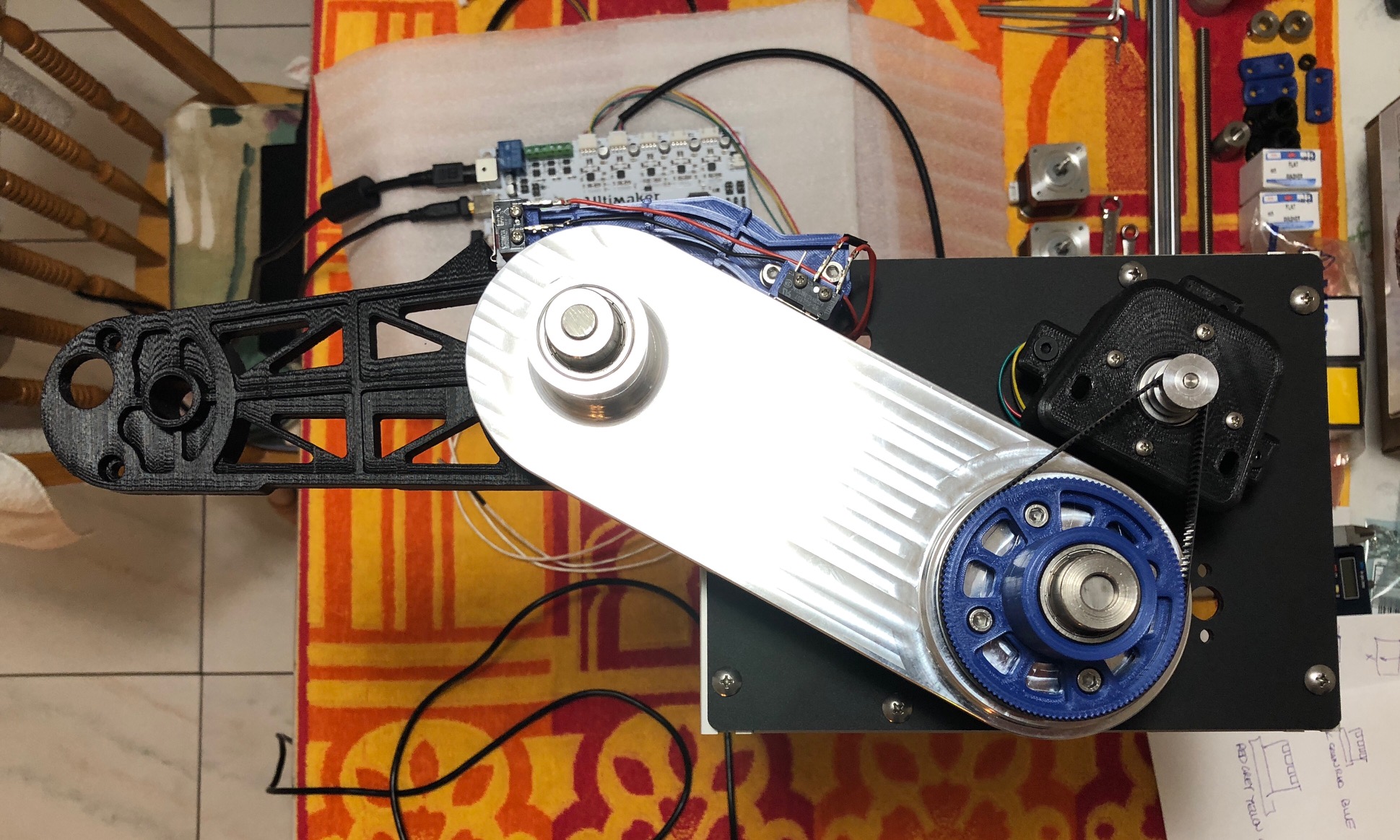
I am using Nema 17 stepper motors, 1.8 degree, 16 steps. my motor pulleys have 20 teeth pulling the other pulleys with 120 teeth so gear ratio is 6.
Any help would be greatly appreciated, i am sure i will get it, it's just entering the correct setting parameters.
I just joined the forum
i really need some help.
i am building a scara 3d printer, i think it's really cool.
i have built 4 3d printers, cartesian style using marlin firmware for ultimaker 2 and they all run well )
but now i am not sure what the parameters should be using the firmware for marlin with scara.
i am somewhat confused.
I am looking also at wangamas, but it seems that there are no pins files for my controller board, i am using the ultimaker 2 board.
so i want to use vitaminRads firmware.
i realise that wangamas firmware uses angles to input as the settings,
Can someone please help.
i have attached a top view Cad drawing and a real picture as of today.
my endstops are located as shown in drawing, and my prefered bed center location. ( is this acceptable )
but i dont understand what the tower offsets from bed center should be , also homing locations.
At the moment just want to test the motors and endstops to make sure everything works fine , before i add the other components
Nozzle, heatbed, controller board mounts , display, etc.
I am using Nema 17 stepper motors, 1.8 degree, 16 steps. my motor pulleys have 20 teeth pulling the other pulleys with 120 teeth so gear ratio is 6.
Any help would be greatly appreciated, i am sure i will get it, it's just entering the correct setting parameters.
|
Re: VitaminRad's Marlin and other SCARA Firmware problems June 25, 2018 04:35AM |
Registered: 8 years ago Posts: 76 |
hello,
if you want to use Marlin firmware, you can try this:
in configuration.h:
#define SCARA
#define scara_segments_per_second 200 //careful, two much will decrease performance... 16MHz
// Length of inner support arm
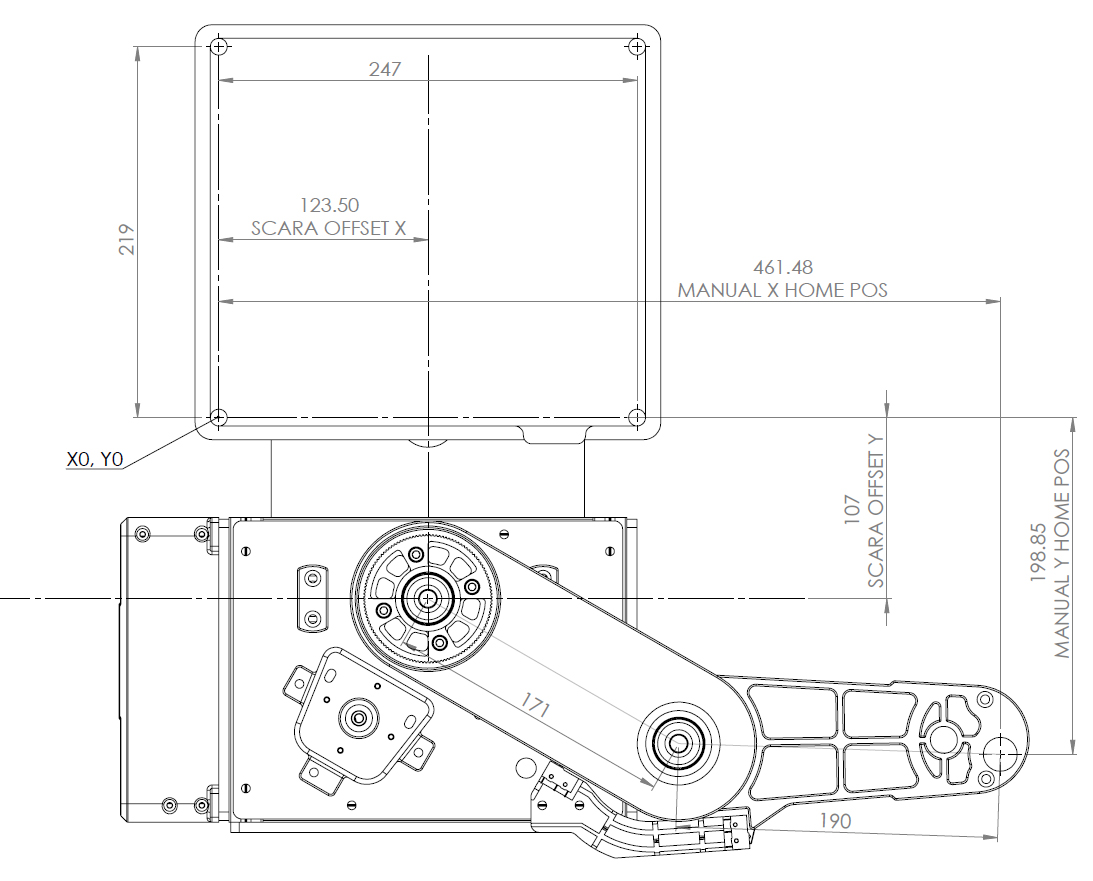
#define Linkage_1 171 //mm Preprocessor cannot handle decimal point...
// Length of outer support arm Measure arm lengths precisely and enter
#define Linkage_2 190 //mm
// SCARA tower offset (position of Tower relative to bed zero position)
// This needs to be reasonably accurate as it defines the printbed position in the SCARA space.
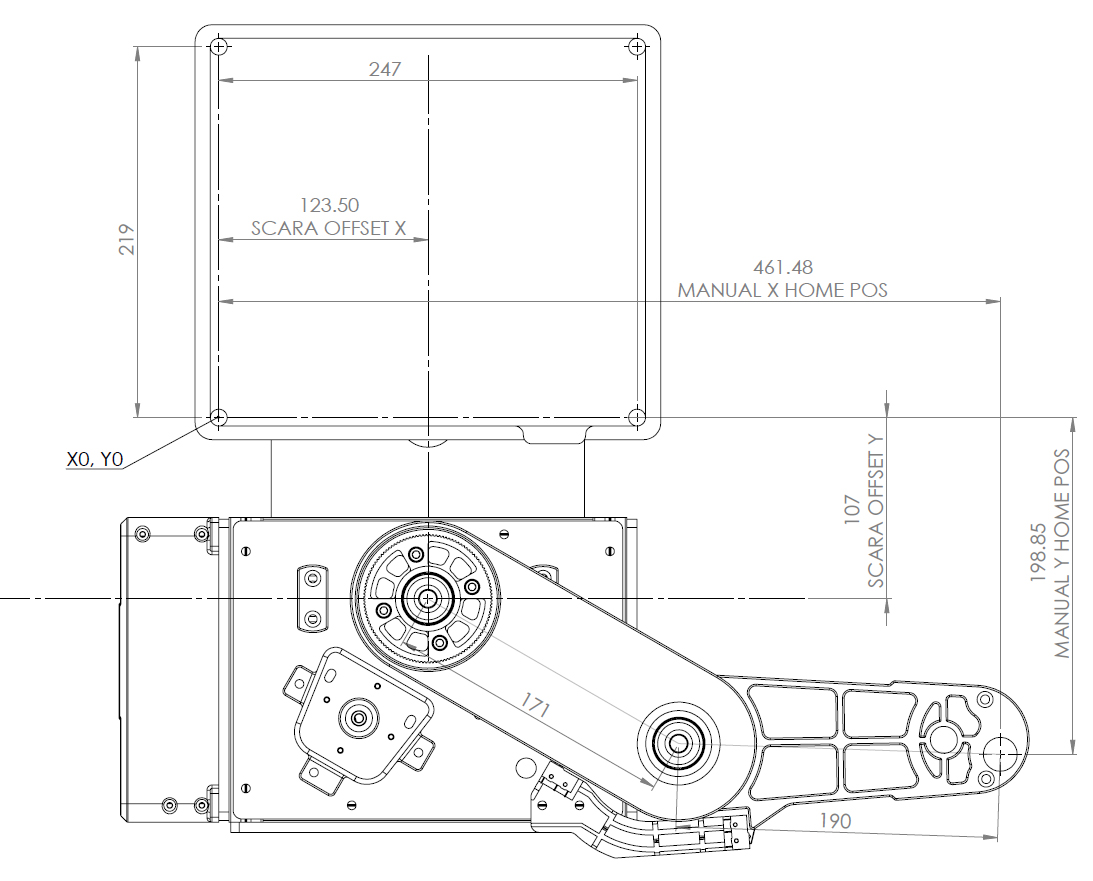
#define SCARA_offset_x 123 //mm
#define SCARA_offset_y -107 //mm
#define SCARA_RAD2DEG 57.2957795 // to convert RAD to degrees
#define THETA_HOMING_OFFSET 0 //calculatated from Calibration Guide and command M360 / M114 see picture in [reprap.harleystudio.co.za]
#define PSI_HOMING_OFFSET 0 // calculatated from Calibration Guide and command M364 / M114 see picture in [reprap.harleystudio.co.za]
//some helper variables to make kinematics faster
#define L1_2 sq(Linkage_1) // do not change
#define L2_2 sq(Linkage_2) // do not change
#define Link2x (Linkage_1+Linkage_2) // do not change
*******
set the endstop according your config +
// ENDSTOP SETTINGS:
// Sets direction of endstops when homing; 1=MAX, -1=MIN (inverted in scara for X&Y)
#define X_HOME_DIR -1
#define Y_HOME_DIR -1
#define Z_HOME_DIR -1
// Travel limits after homing
#define X_MAX_POS 246 (or MANUAL_X_HOME_POS)
#define X_MIN_POS 0
#define Y_MAX_POS 219
#define Y_MIN_POS 0 (or MANUAL_Y_HOME_POS)
#define Z_MAX_POS 120
#define Z_MIN_POS MANUAL_Z_HOME_POS
********
// The position of the homing switches
#define MANUAL_HOME_POSITIONS // If defined, MANUAL_*_HOME_POS below will be used
//#define BED_CENTER_AT_0_0 // If defined, the center of the bed is at (X=0, Y=0)
//Manual homing switch locations:
// For deltabots this means top and center of the Cartesian print volume.
// For SCARA: Offset between HomingPosition and Bed X=0 / Y=0
#define MANUAL_X_HOME_POS 461
#define MANUAL_Y_HOME_POS -199
#define MANUAL_Z_HOME_POS 0 // Distance between nozzle and print surface after homing.
******
settings according your config:
#define DEFAULT_AXIS_STEPS_PER_UNIT
******
for the choice of kinematics it depend of your design...
good luck
if you want to use Marlin firmware, you can try this:
in configuration.h:
#define SCARA
#define scara_segments_per_second 200 //careful, two much will decrease performance... 16MHz
// Length of inner support arm
#define Linkage_1 171 //mm Preprocessor cannot handle decimal point...
// Length of outer support arm Measure arm lengths precisely and enter
#define Linkage_2 190 //mm
// SCARA tower offset (position of Tower relative to bed zero position)
// This needs to be reasonably accurate as it defines the printbed position in the SCARA space.
#define SCARA_offset_x 123 //mm
#define SCARA_offset_y -107 //mm
#define SCARA_RAD2DEG 57.2957795 // to convert RAD to degrees
#define THETA_HOMING_OFFSET 0 //calculatated from Calibration Guide and command M360 / M114 see picture in [reprap.harleystudio.co.za]
#define PSI_HOMING_OFFSET 0 // calculatated from Calibration Guide and command M364 / M114 see picture in [reprap.harleystudio.co.za]
//some helper variables to make kinematics faster
#define L1_2 sq(Linkage_1) // do not change
#define L2_2 sq(Linkage_2) // do not change
#define Link2x (Linkage_1+Linkage_2) // do not change
*******
set the endstop according your config +
// ENDSTOP SETTINGS:
// Sets direction of endstops when homing; 1=MAX, -1=MIN (inverted in scara for X&Y)
#define X_HOME_DIR -1
#define Y_HOME_DIR -1
#define Z_HOME_DIR -1
// Travel limits after homing
#define X_MAX_POS 246 (or MANUAL_X_HOME_POS)
#define X_MIN_POS 0
#define Y_MAX_POS 219
#define Y_MIN_POS 0 (or MANUAL_Y_HOME_POS)
#define Z_MAX_POS 120
#define Z_MIN_POS MANUAL_Z_HOME_POS
********
// The position of the homing switches
#define MANUAL_HOME_POSITIONS // If defined, MANUAL_*_HOME_POS below will be used
//#define BED_CENTER_AT_0_0 // If defined, the center of the bed is at (X=0, Y=0)
//Manual homing switch locations:
// For deltabots this means top and center of the Cartesian print volume.
// For SCARA: Offset between HomingPosition and Bed X=0 / Y=0
#define MANUAL_X_HOME_POS 461
#define MANUAL_Y_HOME_POS -199
#define MANUAL_Z_HOME_POS 0 // Distance between nozzle and print surface after homing.
******
settings according your config:
#define DEFAULT_AXIS_STEPS_PER_UNIT
******
for the choice of kinematics it depend of your design...
good luck
|
Re: VitaminRad's Marlin and other SCARA Firmware problems June 26, 2018 05:29AM |
Registered: 5 years ago Posts: 11 |
Hi Vitamin Rad
Thanks for your help.
I inputted the values in Marlin.
When I home in Pronterface, it does reach the endstops, although I need to place link2 arm slightly away before homing so that Link 1
touches end stop 1st, before Link 2 hits end stop.
M114 command reads this at endstops
SENDING:M114
X:182.57 Y:-127.29 Z:0.00 E:0.00offX:123.50offY:-107.00offZ:0.00 Count X: 153.82 Y:84.77 Z:0.00
Angle_X:153.82Angle_Y:84.78
but when I use a G0 X0 Y0 command after that , it doesn't go to the Bed Center 0,0 as pr my drawing. Any ideas why this is happening ?
I have attached pictures, and the config files that I am using.
I have attached the PDF top view, of where the arms should be when at bed centre 0,0
Also the pulleys on motor have 20 teeth, and the larger pulleys that are connected to arms, have 120 teeth, i am using nema 17 stepper motors
200 steps 16 microsteps -- i come out with 53.33 for the x and y steps that i plug into Marlin, is this correct ??
Edited 3 time(s). Last edit at 06/26/2018 09:33AM by ScaraMan.
Thanks for your help.
I inputted the values in Marlin.
When I home in Pronterface, it does reach the endstops, although I need to place link2 arm slightly away before homing so that Link 1
touches end stop 1st, before Link 2 hits end stop.
M114 command reads this at endstops
SENDING:M114
X:182.57 Y:-127.29 Z:0.00 E:0.00offX:123.50offY:-107.00offZ:0.00 Count X: 153.82 Y:84.77 Z:0.00
Angle_X:153.82Angle_Y:84.78
but when I use a G0 X0 Y0 command after that , it doesn't go to the Bed Center 0,0 as pr my drawing. Any ideas why this is happening ?
I have attached pictures, and the config files that I am using.
I have attached the PDF top view, of where the arms should be when at bed centre 0,0
Also the pulleys on motor have 20 teeth, and the larger pulleys that are connected to arms, have 120 teeth, i am using nema 17 stepper motors
200 steps 16 microsteps -- i come out with 53.33 for the x and y steps that i plug into Marlin, is this correct ??
Edited 3 time(s). Last edit at 06/26/2018 09:33AM by ScaraMan.
|
SCARA MARLIN FIRMWARE -PROBLEM WITH HOMING TO BED POSITION 0,0 July 04, 2018 08:58AM |
Registered: 5 years ago Posts: 11 |
Hi Everyone,
i have been trying for days now, modifying the marlin firmware as attached in my previous post.
But i still cannot get the arms to go to 0,0 position after homing on the end stops.
It seems it wants to go to another position as per image 0523 in previous post.
i am really stuck !!!
When i move x or y in pronterface. the arms move by the amount in the proper directions, but the 0,0 is from that origin
as per the image 0523
i want the origin to be from the bed center as per the attached top view drawings
Can anyone help me, what's the secret here.
I have attached the configuration file in prevoius post i have attached the Marlin_main.cpp with this post also.
I NEED HELP, ANYONE PLEASE ?????
ScaraMan
Edited 1 time(s). Last edit at 07/04/2018 08:59AM by ScaraMan.
i have been trying for days now, modifying the marlin firmware as attached in my previous post.
But i still cannot get the arms to go to 0,0 position after homing on the end stops.
It seems it wants to go to another position as per image 0523 in previous post.
i am really stuck !!!
When i move x or y in pronterface. the arms move by the amount in the proper directions, but the 0,0 is from that origin
as per the image 0523
i want the origin to be from the bed center as per the attached top view drawings
Can anyone help me, what's the secret here.
I have attached the configuration file in prevoius post i have attached the Marlin_main.cpp with this post also.
I NEED HELP, ANYONE PLEASE ?????
ScaraMan
Edited 1 time(s). Last edit at 07/04/2018 08:59AM by ScaraMan.
|
Re: VitaminRad's Marlin and other SCARA Firmware problems July 05, 2018 10:58AM |
Registered: 8 years ago Posts: 76 |
|
Re: VitaminRad's Marlin and other SCARA Firmware problems July 06, 2018 05:47AM |
Registered: 5 years ago Posts: 11 |
hi
currently I am using this one, I have attached the zip file
when the end stops are triggered, this is the reading I get from pronterface with M114 command
SENDING:M114
X:182.57 Y:-127.29 Z:100.00 E:0.00offX:123.50offY:-107.00offZ:0.00 Count X: 152.93 Y:86.39 Z:100.00
Angle_X:152.94Angle_Y:86.39
also, just want to make sure I have calculated the steps correctly, I have entered 53.33 for x and y is this correct ?
I am using 20 tooth pulley on motors driving a pulley on the arm with 120 teeth, gt2 belt , pitch 2mm
microstepping 16, 1.8 degree nema 17 stepper motors
Edited 2 time(s). Last edit at 07/06/2018 05:53AM by ScaraMan.
currently I am using this one, I have attached the zip file
when the end stops are triggered, this is the reading I get from pronterface with M114 command
SENDING:M114
X:182.57 Y:-127.29 Z:100.00 E:0.00offX:123.50offY:-107.00offZ:0.00 Count X: 152.93 Y:86.39 Z:100.00
Angle_X:152.94Angle_Y:86.39
also, just want to make sure I have calculated the steps correctly, I have entered 53.33 for x and y is this correct ?
I am using 20 tooth pulley on motors driving a pulley on the arm with 120 teeth, gt2 belt , pitch 2mm
microstepping 16, 1.8 degree nema 17 stepper motors
Edited 2 time(s). Last edit at 07/06/2018 05:53AM by ScaraMan.
|
Re: VitaminRad's Marlin and other SCARA Firmware problems July 09, 2018 04:51AM |
Registered: 8 years ago Posts: 76 |
yes, your steps/unit seems correct;
what is the source of the firmware? vitaminrad, mine, other?
Before finding a functional config, I tested many versions (vitaminrad, kimbra, morgan, RC ...) and none worked at 100%
so I can only help you on my version and my configuration; and not guaranteed that it works for others...
good luck
what is the source of the firmware? vitaminrad, mine, other?
Before finding a functional config, I tested many versions (vitaminrad, kimbra, morgan, RC ...) and none worked at 100%
so I can only help you on my version and my configuration; and not guaranteed that it works for others...
good luck
|
Re: VitaminRad's Marlin and other SCARA Firmware problems July 10, 2018 05:32AM |
Registered: 5 years ago Posts: 11 |
|
Re: VitaminRad's Marlin and other SCARA Firmware problems July 11, 2018 05:26AM |
Registered: 5 years ago Posts: 11 |
Hi Invent2Main
So you mentioned in your last reply you were willing to help me, I am using your firmware and entered the parameters according
to my setup. When I run pronterface I am able to home the x and y motors to the end stops , then I send an M114 command and this is the reding I get
SENDING:M114
X:467.42 Y:-200.75 Z:0.00 E:0.00 Count X: -24.83 Y:11.98 Z:0.00
SCARA Theta:-24.83 Psi+Theta:11.99
SCARA Cal - Theta:-24.83 Psi+Theta (90):-53.18
SCARA step Cal - Theta:-14.71 Psi+Theta:21.82
What do I do after that ?
if I send a command G0 X0 Y0 to go to my bed center , the arms begin to move but then link 2 continues rotating counterclockwise and won't stop !
I have attached the firmware , and a drawing - TOP VIEW - can you help me please
Thanks
Terry
So you mentioned in your last reply you were willing to help me, I am using your firmware and entered the parameters according
to my setup. When I run pronterface I am able to home the x and y motors to the end stops , then I send an M114 command and this is the reding I get
SENDING:M114
X:467.42 Y:-200.75 Z:0.00 E:0.00 Count X: -24.83 Y:11.98 Z:0.00
SCARA Theta:-24.83 Psi+Theta:11.99
SCARA Cal - Theta:-24.83 Psi+Theta (90):-53.18
SCARA step Cal - Theta:-14.71 Psi+Theta:21.82
What do I do after that ?
if I send a command G0 X0 Y0 to go to my bed center , the arms begin to move but then link 2 continues rotating counterclockwise and won't stop !
I have attached the firmware , and a drawing - TOP VIEW - can you help me please
Thanks
Terry
|
Re: VitaminRad's Marlin and other SCARA Firmware problems July 16, 2018 03:47AM |
Registered: 8 years ago Posts: 76 |
hello,
if you use my version without changes it's normal; you have to change the the type of kinematics that depend of your design in the file Marlin_main.cpp:
just change y in the forward kinematics:
y_sin = sin(f_scara[Y_AXIS]/SCARA_RAD2DEG) * Linkage_2; // classical SCARA style
y_cos = cos(f_scara[Y_AXIS]/SCARA_RAD2DEG) * Linkage_2; // classical SCARA style
//y_sin = sin((f_scara[Y_AXIS]+(f_scara[X_AXIS]*3/4))/SCARA_RAD2DEG) * Linkage_2; //MODIF FOR ARMONI
//y_cos = cos((f_scara[Y_AXIS]+(f_scara[X_AXIS]*3/4))/SCARA_RAD2DEG) * Linkage_2; //MODIF FOR ARMONI
for inverse kinematics you need the second Delta(Y):
//delta[Y_AXIS] = (SCARA_theta + SCARA_psi) * SCARA_RAD2DEG; // Morgan style
delta[Y_AXIS] = SCARA_psi * SCARA_RAD2DEG; // classical SCARA style
//delta[Y_AXIS] = (SCARA_psi + (SCARA_theta/4)) * SCARA_RAD2DEG; //MODIF FOR ARMONI (s2a)
I modified the attached file
if you use my version without changes it's normal; you have to change the the type of kinematics that depend of your design in the file Marlin_main.cpp:
just change y in the forward kinematics:
y_sin = sin(f_scara[Y_AXIS]/SCARA_RAD2DEG) * Linkage_2; // classical SCARA style
y_cos = cos(f_scara[Y_AXIS]/SCARA_RAD2DEG) * Linkage_2; // classical SCARA style
//y_sin = sin((f_scara[Y_AXIS]+(f_scara[X_AXIS]*3/4))/SCARA_RAD2DEG) * Linkage_2; //MODIF FOR ARMONI
//y_cos = cos((f_scara[Y_AXIS]+(f_scara[X_AXIS]*3/4))/SCARA_RAD2DEG) * Linkage_2; //MODIF FOR ARMONI
for inverse kinematics you need the second Delta(Y):
//delta[Y_AXIS] = (SCARA_theta + SCARA_psi) * SCARA_RAD2DEG; // Morgan style
delta[Y_AXIS] = SCARA_psi * SCARA_RAD2DEG; // classical SCARA style
//delta[Y_AXIS] = (SCARA_psi + (SCARA_theta/4)) * SCARA_RAD2DEG; //MODIF FOR ARMONI (s2a)
I modified the attached file
|
Re: VitaminRad's Marlin and other SCARA Firmware problems July 16, 2018 05:59AM |
Registered: 5 years ago Posts: 11 |
HI
I tried your suggestion, but with no success
pronterface is able to send command to home end stops for x and y, but after I send a G0 X0 Y0, it freaks.
I have attached a link to video and the firmware, please take a look
[youtu.be]
I tried your suggestion, but with no success
pronterface is able to send command to home end stops for x and y, but after I send a G0 X0 Y0, it freaks.
I have attached a link to video and the firmware, please take a look
[youtu.be]
|
Re: VitaminRad's Marlin and other SCARA Firmware problems July 16, 2018 09:08AM |
Registered: 8 years ago Posts: 76 |
|
Re: VitaminRad's Marlin and other SCARA Firmware problems July 16, 2018 11:41AM |
Registered: 5 years ago Posts: 11 |
|
Re: VitaminRad's Marlin and other SCARA Firmware problems September 03, 2018 09:18PM |
Registered: 6 years ago Posts: 2 |
|
Re: VitaminRad's Marlin and other SCARA Firmware problems September 06, 2018 11:42PM |
Registered: 6 years ago Posts: 20 |
|
Re: VitaminRad's Marlin and other SCARA Firmware problems September 07, 2018 12:34AM |
Registered: 6 years ago Posts: 2 |

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Sorry, only registered users may post in this forum.