VitaminRad's Marlin and other SCARA Firmware problems
Posted by Power3DPrinting
|
Preliminary Calibration for SCARA 3D Printer using InventMain Firmware September 19, 2018 02:48PM |
Registered: 5 years ago Posts: 11 |
Hi Guys,
It's been a while, was on holidays. Now i am back, and trying endlessly to still set up my printer- at least make sure that the arms Link 1 and Link 2
move correctly to the desired locations i have chosen , it seems every time i change a parameter in the firmware , it just doesn't do what i want.
I would really appreciate if anyone could shed some light to my frustration.
I am trying to configure Firmware from Invent Main to work with my 3d printer.
I did some changes and moved my end stops to the other side, from the last time
i had posted, see prevoius posts. ( Thinking that end stops were too far, from Bed center ( 0, 0 )
There is 2 files attached with this post, and a youtube link below
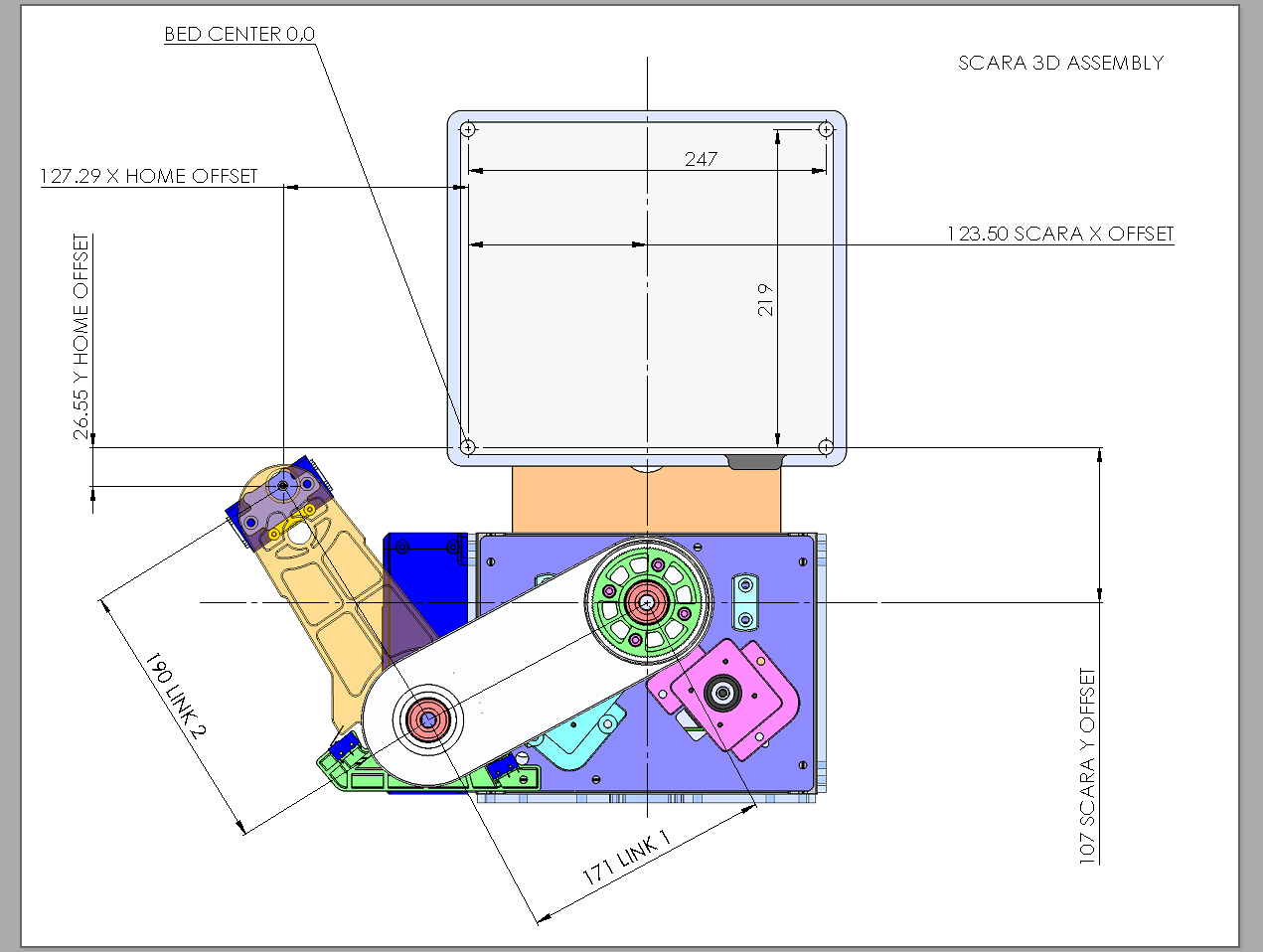
filename : Top View SCARA 3D PRINTER.jpg
This image is a Top View of My Scara 3D printer with proper dimensions
filename : Marlin8_ArmOni_Solo_Sep_13_2018.zip
Contains the current firmware i used according to the video you see
Yout tube Link Video -- [youtu.be]
Video shows the arms being homed, and then i give a command
after homing
G0 X0 YO, THEN G0 X0 Y 219 THEN G0 X 247 Y 219 THEN G0 X 247 Y 0
AND FINALLY G0 X0 Y0
As you see they are not in proper positions
By the way when i home, i press x home on pronterface and the y home on pronterface
following the G0 X0 YO
But if i home using G28 command , it will not move after i give command
G0 X0 Y0
filename : Top View SCARA 3D PRINTER.jpg
This image is a Top View of My Scara 3D printer with proper dimensions
filename : Marlin8_ArmOni_Solo_Sep_13_2018.zip
Contains the current firmware i used according to the video you see
Please help me, i am out of ideas, i don't know what to do
Scaraman
It's been a while, was on holidays. Now i am back, and trying endlessly to still set up my printer- at least make sure that the arms Link 1 and Link 2
move correctly to the desired locations i have chosen , it seems every time i change a parameter in the firmware , it just doesn't do what i want.
I would really appreciate if anyone could shed some light to my frustration.
I am trying to configure Firmware from Invent Main to work with my 3d printer.
I did some changes and moved my end stops to the other side, from the last time
i had posted, see prevoius posts. ( Thinking that end stops were too far, from Bed center ( 0, 0 )
There is 2 files attached with this post, and a youtube link below
filename : Top View SCARA 3D PRINTER.jpg
This image is a Top View of My Scara 3D printer with proper dimensions
filename : Marlin8_ArmOni_Solo_Sep_13_2018.zip
Contains the current firmware i used according to the video you see
Yout tube Link Video -- [youtu.be]
Video shows the arms being homed, and then i give a command
after homing
G0 X0 YO, THEN G0 X0 Y 219 THEN G0 X 247 Y 219 THEN G0 X 247 Y 0
AND FINALLY G0 X0 Y0
As you see they are not in proper positions
By the way when i home, i press x home on pronterface and the y home on pronterface
following the G0 X0 YO
But if i home using G28 command , it will not move after i give command
G0 X0 Y0
filename : Top View SCARA 3D PRINTER.jpg
This image is a Top View of My Scara 3D printer with proper dimensions
filename : Marlin8_ArmOni_Solo_Sep_13_2018.zip
Contains the current firmware i used according to the video you see
Please help me, i am out of ideas, i don't know what to do
Scaraman
|
Re: VitaminRad's Marlin and other SCARA Firmware problems January 14, 2019 07:17AM |
Registered: 6 years ago Posts: 20 |
|
Re: VitaminRad's Marlin and other SCARA Firmware problems March 25, 2019 05:07AM |
Registered: 5 years ago Posts: 5 |
I noticed that the firmware called the kinematic inverse solution of the SCARA robot before calling the plan_buffer_line function, and then assigns the calculated three joint angle values to the plan_buffer_line function.After reading the plan_buffer_line function in detail, I feel that this is wrong.
This is because all the computational algorithmic processes in the function are directed to Cartesian Cartesian coordinate space, for example:
block->millimeters = sqrt(square(delta_mm[X_HEAD]) + square(delta_mm[Y_HEAD]) + square(delta_mm[Z_AXIS]));
This is to calculate the spatial moving distance through the three target coordinates of Cartesian space. If it is replaced by three joint angle values, is this wrong?
The latter algorithm has similar problems, especially the Breasham algorithm in ISR, which is completely an algorithm of Cartesian space. If the value passed to the algorithm is three joint angle values, I think it should be incorrect.
I looked at the code for the marlin 1.1 version and there are similar issues.
I hope that my doubts can be answered, thank you!smiling smiley
My email address: dongxvzhou@gmail.com
This is because all the computational algorithmic processes in the function are directed to Cartesian Cartesian coordinate space, for example:
block->millimeters = sqrt(square(delta_mm[X_HEAD]) + square(delta_mm[Y_HEAD]) + square(delta_mm[Z_AXIS]));
This is to calculate the spatial moving distance through the three target coordinates of Cartesian space. If it is replaced by three joint angle values, is this wrong?
The latter algorithm has similar problems, especially the Breasham algorithm in ISR, which is completely an algorithm of Cartesian space. If the value passed to the algorithm is three joint angle values, I think it should be incorrect.
I looked at the code for the marlin 1.1 version and there are similar issues.
I hope that my doubts can be answered, thank you!smiling smiley
My email address: dongxvzhou@gmail.com

{kind=link}
{kind=link}
Sorry, only registered users may post in this forum.