Rotary Printer (again and again)
Posted by plasticmonk
|
Rotary Printer (again and again) June 25, 2019 03:56PM |
Registered: 9 years ago Posts: 46 |
Hey there,
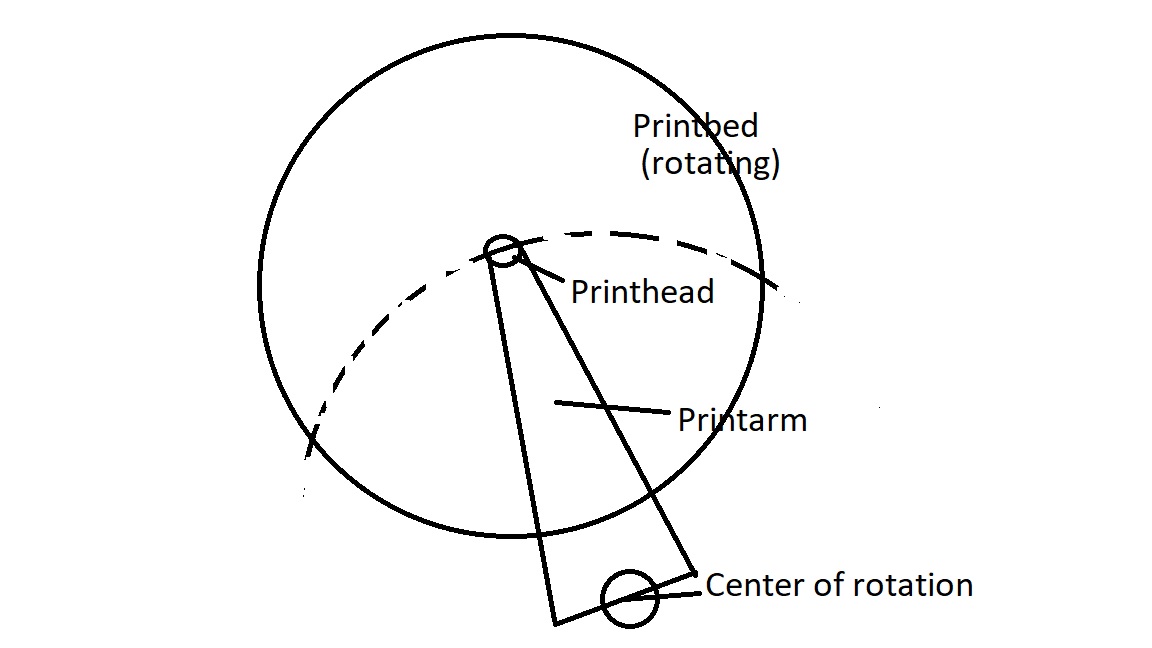
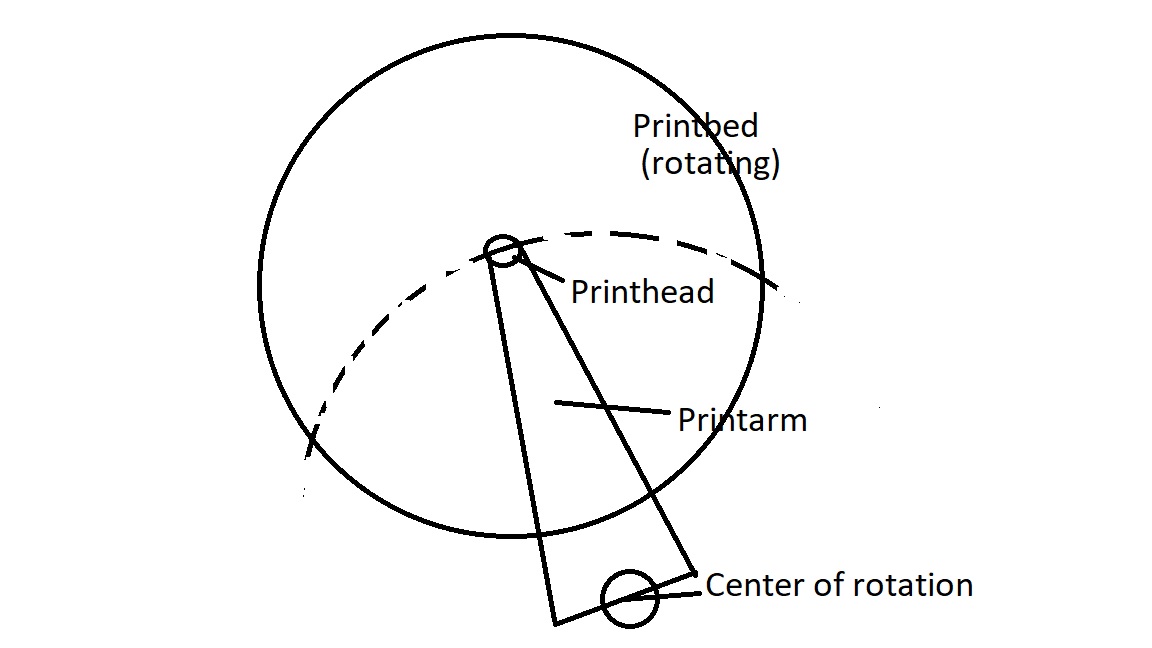
I´m just the next nerd whos trying to build a rotary 3d-Printer like a record player. A rotating buildplate and a arm, who also describes a circle wich crosses exactly threw the center of the buildplate.
I created some basic hardware wich is good enough to get the most importat part on track: the Firmware.
I realized there has bee several projects talking about printers like this but no one came up with a public version of Marlin. Ok there is R-360 but he has olny one circle and one linear axis. I had a look into this Marlin version but I don´t think it is suitable for me and my limited knowledge about coding.
So I came up with the idea to exploid some up to date marlin´s scara code for my project. After all there are two axis wich are already using polar coordinates and I was hoping just to adapt it somehow. Examining the Marlin_main.cpp I realized that I am not quite able whats happening there.
Appart form some other things I found this:
float a_sin = sin(RADIANS(a)) * L1,
a_cos = cos(RADIANS(a)) * L1,
b_sin = sin(RADIANS(b)) * L2,
b_cos = cos(RADIANS(b)) * L2;
but I coudn´t find out what ore were the definition fo (a) and (b) takes place L1 and L2 are the arms so much I was able to find out. Thats just an example... it goes on and on and I just cannot get a hang of it.
So my questions are:
1st. ist there by any chance a Malin firmware present for download wich works with this kind of setup? I coud not find any but it took me ages to find R-360. So maybe there is something out there and I just don´t know.
2nd. ist there any recource wich kind of logicly explains how the scara setup in marlin is implemented? Essencially I have to change some stuff of the calculation and movie the ankle points somehow to the location were they are. And the speeds inclination has to be reversed. I cannot understand the marlin_main.cpp its a bit to high for me...
any help or hint would be appreaciated. I just wanna get this thing to work. Then I will continue on the hardware.
best,
Florian
Edited 1 time(s). Last edit at 06/25/2019 04:03PM by plasticmonk.
guru meditation
www.3dk.berlin
I´m just the next nerd whos trying to build a rotary 3d-Printer like a record player. A rotating buildplate and a arm, who also describes a circle wich crosses exactly threw the center of the buildplate.
I created some basic hardware wich is good enough to get the most importat part on track: the Firmware.
I realized there has bee several projects talking about printers like this but no one came up with a public version of Marlin. Ok there is R-360 but he has olny one circle and one linear axis. I had a look into this Marlin version but I don´t think it is suitable for me and my limited knowledge about coding.
So I came up with the idea to exploid some up to date marlin´s scara code for my project. After all there are two axis wich are already using polar coordinates and I was hoping just to adapt it somehow. Examining the Marlin_main.cpp I realized that I am not quite able whats happening there.
Appart form some other things I found this:
float a_sin = sin(RADIANS(a)) * L1,
a_cos = cos(RADIANS(a)) * L1,
b_sin = sin(RADIANS(b)) * L2,
b_cos = cos(RADIANS(b)) * L2;
but I coudn´t find out what ore were the definition fo (a) and (b) takes place L1 and L2 are the arms so much I was able to find out. Thats just an example... it goes on and on and I just cannot get a hang of it.
So my questions are:
1st. ist there by any chance a Malin firmware present for download wich works with this kind of setup? I coud not find any but it took me ages to find R-360. So maybe there is something out there and I just don´t know.
2nd. ist there any recource wich kind of logicly explains how the scara setup in marlin is implemented? Essencially I have to change some stuff of the calculation and movie the ankle points somehow to the location were they are. And the speeds inclination has to be reversed. I cannot understand the marlin_main.cpp its a bit to high for me...
any help or hint would be appreaciated. I just wanna get this thing to work. Then I will continue on the hardware.
best,
Florian
Edited 1 time(s). Last edit at 06/25/2019 04:03PM by plasticmonk.
guru meditation
www.3dk.berlin
{kind=link}
{kind=link}
|
Re: Rotary Printer (again and again) June 25, 2019 04:21PM |
Registered: 10 years ago Posts: 14,672 |
If you have a 32-bit controller board, have you considered using RepRepFirmware instead of Marlin? it supports polar kinematics as standard.
Large delta printer [miscsolutions.wordpress.com], E3D tool changer, Robotdigg SCARA printer, Crane Quad and Ormerod
Disclosure: I design Duet electronics and work on RepRapFirmware, [duet3d.com].
Large delta printer [miscsolutions.wordpress.com], E3D tool changer, Robotdigg SCARA printer, Crane Quad and Ormerod
Disclosure: I design Duet electronics and work on RepRapFirmware, [duet3d.com].
|
Re: Rotary Printer (again and again) June 25, 2019 05:49PM |
Registered: 9 years ago Posts: 46 |
Yea thought about that one. But I want to keep it cheap. Thats one of the main goals of this project. As much a possible pritned parts and a very short list of bill of materials. e.g. just one ore two types of screw etc.
So it should run on cheap boards and therefore I´d prefer using marlin.
guru meditation
www.3dk.berlin
So it should run on cheap boards and therefore I´d prefer using marlin.
guru meditation
www.3dk.berlin
Sorry, only registered users may post in this forum.