|
Marlin 2.0.7, MKS_L v.2.1, TMC2209 v.3 - Achsen bewegen 07. March 2021 05:24 |
Registrierungsdatum: 3 Jahre zuvor Beiträge: 49 |
Hallo,
meinem ersten Ziel, die Achsen meines DY-Druckers zu bewegen bin ich ziemlich nahe gekommen, aber nicht ganz.
Vielleicht kann bitte jemand meine dabei aufgetretene Fragen beantworten.
Erst einmal Grundsätzliches:
1. configuration.h habe soweit hochgeladen
Was ist mit der configuration_adv.h ? Muß die auch kompiliert und hochgeladen werden?
2. Die Werte können auf dem Display überschrieben werden
Was aber bedeutet, die Werte können mit Mxxx überschrieben werden? Wo können diese Befehle eingegeben werden?
Motoreinstellungen:
X/Y-Achse: T2 Zahnriemen mit 20 Zähne-Ritzel --> 80 Steps/mm
Z-Achse: Trapezgewindespindel mit 2mm Steigung --> 1600 Steps/mm
Extruder noch nicht konfiguriert
also
DEFAULT_AXIS_STEPS_PER_UNIT 80, 80, 1600, 500
Geschwindigkeits- und Beschleunigungs-Werte habe ich nicht geändert
1. Wenn beim Einschalten die Achsen irgendwo in der Mitte stehen, kann ich sie nur in eine Richtung (+) bewegen. Warum nicht auch in die andere (-) ?
2. Ich kann wählen zwischen 10mm, 1mm und 0.1mm Bewegung. Alle drei Achsen bewegen sich aber um den doppelten Betrag.
Deutet darauf hin, daß die Motoren im Vollstep-Modus laufen. Jumper setzen entfällt, da die Treiber im UART-Modus laufen.
Wo kann man die Steps einstellen?
Gruß Hardy
2-mal bearbeitet. Zuletzt am 07.03.21 05:28.
meinem ersten Ziel, die Achsen meines DY-Druckers zu bewegen bin ich ziemlich nahe gekommen, aber nicht ganz.
Vielleicht kann bitte jemand meine dabei aufgetretene Fragen beantworten.
Erst einmal Grundsätzliches:
1. configuration.h habe soweit hochgeladen
Was ist mit der configuration_adv.h ? Muß die auch kompiliert und hochgeladen werden?
2. Die Werte können auf dem Display überschrieben werden
Was aber bedeutet, die Werte können mit Mxxx überschrieben werden? Wo können diese Befehle eingegeben werden?
Motoreinstellungen:
X/Y-Achse: T2 Zahnriemen mit 20 Zähne-Ritzel --> 80 Steps/mm
Z-Achse: Trapezgewindespindel mit 2mm Steigung --> 1600 Steps/mm
Extruder noch nicht konfiguriert
also
DEFAULT_AXIS_STEPS_PER_UNIT 80, 80, 1600, 500
Geschwindigkeits- und Beschleunigungs-Werte habe ich nicht geändert
1. Wenn beim Einschalten die Achsen irgendwo in der Mitte stehen, kann ich sie nur in eine Richtung (+) bewegen. Warum nicht auch in die andere (-) ?
2. Ich kann wählen zwischen 10mm, 1mm und 0.1mm Bewegung. Alle drei Achsen bewegen sich aber um den doppelten Betrag.
Deutet darauf hin, daß die Motoren im Vollstep-Modus laufen. Jumper setzen entfällt, da die Treiber im UART-Modus laufen.
Wo kann man die Steps einstellen?
Gruß Hardy
2-mal bearbeitet. Zuletzt am 07.03.21 05:28.
|
Re: Marlin 2.0.7, MKS_L v.2.1, TMC2209 v.3 - Achsen bewegen 08. March 2021 11:54 |
Registrierungsdatum: 9 Jahre zuvor Beiträge: 1.610 |
Da niemand antwortet:
Grundsätzliches:
1. die configuration_adv.h beinhaltet ebenfalls wichtige Einstellungen,
in diesem Fall auch die Antwort auf s.u. 2. Die Firmware besteht aus vielen
einzelnen Modulen (siehe Unterordner im Ordner \source), diese sind nach
ihren Aufgabengebieten benannt und geordnet. Die configuration.h und die
configuration_adv.h sind die beiden Dateien mit den Nutzereinstellungen,
deshalb sind nur diese im Hauptverzeichnis (war bei vorigen Versionen anders).
Nach dem Kompilieren der einzelnen Module werden diese mit den erforderlichen
Bibliotheken in einer großen Datei zusammengeführt und diese wird dann hochgeladen.
2. Mxxx steht für "einen beliebigen M-Code". Bestimmte Werte können über das
Display geändert werden und werden dann im EEPROM gespeichert, siehe auch [marlinfw.org]
Die M-Codes eingeben kannst Du über Pronterface/Repetier Host/Arduino etc. via USB.
Motoreinstellungen:
1. Das ist Absicht, vor dem Homen kannst Du nur in Richtung Endstop fahren, das soll
Beschädigungen des Druckers verhindern.
2. [marlinfw.org]
Generell solltest Du dich ein wenig mehr in der Theorie mit der Materie befassen,
normalerweise erwarten hier die meisten, dass man diese Probleme eigenständig löst.
Herzl. Grüße
Grundsätzliches:
1. die configuration_adv.h beinhaltet ebenfalls wichtige Einstellungen,
in diesem Fall auch die Antwort auf s.u. 2. Die Firmware besteht aus vielen
einzelnen Modulen (siehe Unterordner im Ordner \source), diese sind nach
ihren Aufgabengebieten benannt und geordnet. Die configuration.h und die
configuration_adv.h sind die beiden Dateien mit den Nutzereinstellungen,
deshalb sind nur diese im Hauptverzeichnis (war bei vorigen Versionen anders).
Nach dem Kompilieren der einzelnen Module werden diese mit den erforderlichen
Bibliotheken in einer großen Datei zusammengeführt und diese wird dann hochgeladen.
2. Mxxx steht für "einen beliebigen M-Code". Bestimmte Werte können über das
Display geändert werden und werden dann im EEPROM gespeichert, siehe auch [marlinfw.org]
Die M-Codes eingeben kannst Du über Pronterface/Repetier Host/Arduino etc. via USB.
Motoreinstellungen:
1. Das ist Absicht, vor dem Homen kannst Du nur in Richtung Endstop fahren, das soll
Beschädigungen des Druckers verhindern.
2. [marlinfw.org]
Generell solltest Du dich ein wenig mehr in der Theorie mit der Materie befassen,
normalerweise erwarten hier die meisten, dass man diese Probleme eigenständig löst.
Herzl. Grüße
|
Re: Marlin 2.0.7, MKS_L v.2.1, TMC2209 v.3 - Achsen bewegen 08. March 2021 13:43 |
Registrierungsdatum: 3 Jahre zuvor Beiträge: 49 |
Hallo Alter Bastler (eigentlich hätte ich mich auch so nennen können),
ich bin mit meinen 77 Jahren noch nicht dement aber es könnte sein, etwas langsam vom Begriff.
Sei versichert, daß ich als Anfänger auf diesem Gebiet, mich nicht nur ein wenig mit der Theorie befasse.
Bevor ich hier eine Frage stelle, versuche ich mit allen Mitteln das Problem eigenständig zu lösen.
Alle verfügbaren Dokumentationen über Marlin sind mir bekannt und bin sie nicht nur einmal durchgegangen.
Alle möglichen Variationen einer Fragestellung gebe ich dann in Google ein und versuche den Antworten in verschiedenen Foren zu folgen.
Meistens handelt es sich aber bei den Fragenstellern um gänzlich andere Probleme bzw. Konfigurationen.
Eigentlich habe ich erwartet hier im Forum Spezialisten bzw. Anwender mit einschlägigen Erfahrungen zu treffen, die Antworten auf Anfängerfragen quasi aus dem Ärmel schütteln können.
Ich erwarte ja keine aufwändige fertige Lösungen für meine Probleme, nur kurze Antwort oder Anstoß, um weiter in meinem Projekt werkeln zu können.
Das alles ist mir bekannt.
Vielleicht blöd gefragt. Ich wollte nur wissen ob beide Dateien kompiliert werden müssen und dann nacheinander hochgeladen werden.
In dem Falle habe ich Bedenken, daß die 2. Datei die 1. überschreibt.
Oder wird nur die configuration.h hochgeladen und die configuration_adv.h im Hintergrund mitgenommen so wie die anderen xxx.h Dateien, die ich nicht einzeln kompilieren muß.
Ein C++ Programmierer mag so etwas wissen, und deswegen wird es nirgends erwähnt - ich leider aber nicht.
Auch die Doku kenne ich.
Ich habe jedoch den Treiber TMC2209
und in der Doku sind nur die TMC26x, TMC2130, L6470 und andere Bibliotheken aufgeführt.
Deswegen meine Frage.
Ich hoffe, hier im Forum weiterhin anfragen zu dürfen und mich nicht für meine Fragen rechtfertigen zu müssen bzw. zu befürchten, daß man als faul angesehen wird.
Für jede Antwort bin ich ungeheuer dankbar, da ich dann weiter in meinem Projekt arbeiten kann.
Gruß Hardy
Quote
AlterBastler
Generell solltest Du dich ein wenig mehr in der Theorie mit der Materie befassen,
normalerweise erwarten hier die meisten, dass man diese Probleme eigenständig löst.
ich bin mit meinen 77 Jahren noch nicht dement aber es könnte sein, etwas langsam vom Begriff.
Sei versichert, daß ich als Anfänger auf diesem Gebiet, mich nicht nur ein wenig mit der Theorie befasse.
Bevor ich hier eine Frage stelle, versuche ich mit allen Mitteln das Problem eigenständig zu lösen.
Alle verfügbaren Dokumentationen über Marlin sind mir bekannt und bin sie nicht nur einmal durchgegangen.
Alle möglichen Variationen einer Fragestellung gebe ich dann in Google ein und versuche den Antworten in verschiedenen Foren zu folgen.
Meistens handelt es sich aber bei den Fragenstellern um gänzlich andere Probleme bzw. Konfigurationen.
Eigentlich habe ich erwartet hier im Forum Spezialisten bzw. Anwender mit einschlägigen Erfahrungen zu treffen, die Antworten auf Anfängerfragen quasi aus dem Ärmel schütteln können.
Ich erwarte ja keine aufwändige fertige Lösungen für meine Probleme, nur kurze Antwort oder Anstoß, um weiter in meinem Projekt werkeln zu können.
Quote
AlterBastler
Grundsätzliches:
1. die configuration_adv.h beinhaltet ebenfalls wichtige Einstellungen,
in diesem Fall auch die Antwort auf s.u. 2. Die Firmware besteht aus vielen
einzelnen Modulen (siehe Unterordner im Ordner \source), diese sind nach
ihren Aufgabengebieten benannt und geordnet. Die configuration.h und die
configuration_adv.h sind die beiden Dateien mit den Nutzereinstellungen,
deshalb sind nur diese im Hauptverzeichnis (war bei vorigen Versionen anders).
Nach dem Kompilieren der einzelnen Module werden diese mit den erforderlichen
Bibliotheken in einer großen Datei zusammengeführt und diese wird dann hochgeladen.
Das alles ist mir bekannt.
Vielleicht blöd gefragt. Ich wollte nur wissen ob beide Dateien kompiliert werden müssen und dann nacheinander hochgeladen werden.
In dem Falle habe ich Bedenken, daß die 2. Datei die 1. überschreibt.
Oder wird nur die configuration.h hochgeladen und die configuration_adv.h im Hintergrund mitgenommen so wie die anderen xxx.h Dateien, die ich nicht einzeln kompilieren muß.
Ein C++ Programmierer mag so etwas wissen, und deswegen wird es nirgends erwähnt - ich leider aber nicht.
Auch die Doku kenne ich.
Ich habe jedoch den Treiber TMC2209
und in der Doku sind nur die TMC26x, TMC2130, L6470 und andere Bibliotheken aufgeführt.
Deswegen meine Frage.
Ich hoffe, hier im Forum weiterhin anfragen zu dürfen und mich nicht für meine Fragen rechtfertigen zu müssen bzw. zu befürchten, daß man als faul angesehen wird.
Für jede Antwort bin ich ungeheuer dankbar, da ich dann weiter in meinem Projekt arbeiten kann.
Gruß Hardy
|
Re: Marlin 2.0.7, MKS_L v.2.1, TMC2209 v.3 - Achsen bewegen 08. March 2021 14:09 |
Registrierungsdatum: 9 Jahre zuvor Beiträge: 1.610 |
Mit den paar Jahren Altersunterschied kannst Du dich nicht rausreden... 
Du hast mich trotzdem nicht verstanden. Kompiliert wird IMMER die
gesamte Firmware, bei jeder Änderung. Reihenfolge egal.
Der von mir verlinkte Abschnitt bezieht sich auf Trinamic allgemein und beinhaltet TMC2209.
Herzl. Grüße
Du hast mich trotzdem nicht verstanden. Kompiliert wird IMMER die
gesamte Firmware, bei jeder Änderung. Reihenfolge egal.
Der von mir verlinkte Abschnitt bezieht sich auf Trinamic allgemein und beinhaltet TMC2209.
Herzl. Grüße
|
Re: Marlin 2.0.7, MKS_L v.2.1, TMC2209 v.3 - Achsen bewegen 09. March 2021 11:40 |
Registrierungsdatum: 3 Jahre zuvor Beiträge: 49 |
Quote
AlterBastler
Der von mir verlinkte Abschnitt bezieht sich auf Trinamic allgemein und beinhaltet TMC2209.
In dem Abschnitt habe ich die Microsteps geändert (0, 16, 32) am Verfahrweg der Achsen ändert sich leider aber nichts.
Es wird immer der doppelte Weg verfahren als angewählt.
Unterhalb des Abschnitts ist ein Hinweis "Sie benötigen die TMC2130Stepper Arduino-Bibliothek".
Obwohl ich schon die TMCStepper-Bibliothek installiert habe, habe ich die obere auch installiert. Bringt leider aber auch nichts.
Wenn ich "#define SOFTWARE_DRIVER_ENABLE" anwähle, bewegt sich keine Achse.
Quote
AlterBastler
normalerweise erwarten hier die meisten, dass man diese Probleme eigenständig löst.
Wenn man die Probleme immer eigenständig löst wird es hier im Forum ziemlich öde, oder?
Versuche ich leider schon den ganzen Tag vergebens. Darf ich trotzdem auf eine Hilfe hoffen?
Gruß Hardy
1-mal bearbeitet. Zuletzt am 09.03.21 11:43.
|
Re: Marlin 2.0.7, MKS_L v.2.1, TMC2209 v.3 - Achsen bewegen 09. March 2021 12:50 |
Registrierungsdatum: 5 Jahre zuvor Beiträge: 143 |
|
Re: Marlin 2.0.7, MKS_L v.2.1, TMC2209 v.3 - Achsen bewegen 09. March 2021 12:54 |
Registrierungsdatum: 9 Jahre zuvor Beiträge: 1.610 |
|
Re: Marlin 2.0.7, MKS_L v.2.1, TMC2209 v.3 - Achsen bewegen 09. March 2021 13:17 |
Registrierungsdatum: 3 Jahre zuvor Beiträge: 49 |
Hallo Wintex,
danke Dir für deinen Tipp. Auch das mit dem Reset bringt leider nichts. Die Schrittmotoren reagieren auf keine Änderung der Steps-Einstellung. Da ich die Treiber im UART-Modus habe, befürchte ich, daß noch zusätzliche Einstellungen notwendig sind, Aber wenn ich es mit "#define SOFTWARE_DRIVER_ENABLE" versuche, bewegen sich die Achsen überhaupt nicht. Bin die configuration.h und -adv.h schon zigmal rauf und runter aber finde keine passende Einstellung.
Gruß Hardy
danke Dir für deinen Tipp. Auch das mit dem Reset bringt leider nichts. Die Schrittmotoren reagieren auf keine Änderung der Steps-Einstellung. Da ich die Treiber im UART-Modus habe, befürchte ich, daß noch zusätzliche Einstellungen notwendig sind, Aber wenn ich es mit "#define SOFTWARE_DRIVER_ENABLE" versuche, bewegen sich die Achsen überhaupt nicht. Bin die configuration.h und -adv.h schon zigmal rauf und runter aber finde keine passende Einstellung.
Gruß Hardy
|
Re: Marlin 2.0.7, MKS_L v.2.1, TMC2209 v.3 - Achsen bewegen 09. March 2021 13:36 |
Registrierungsdatum: 3 Jahre zuvor Beiträge: 49 |
Auch dir Alter Bastler vielen Dank,
aber die Treiber nicht einzutragen, das wäre schon Demenz.
Irgendwo muß man wahrscheinlich in der Software den UART-Modus erwähnen. Finde aber keine Einstellmöglichkeit. Auch die Suche mit "UART" bringt lediglich die Erklärung der Verdrahtung am TMC2208, die am TMC2209 nicht mehr nötig ist.
Gruß Hardy
aber die Treiber nicht einzutragen, das wäre schon Demenz.
Irgendwo muß man wahrscheinlich in der Software den UART-Modus erwähnen. Finde aber keine Einstellmöglichkeit. Auch die Suche mit "UART" bringt lediglich die Erklärung der Verdrahtung am TMC2208, die am TMC2209 nicht mehr nötig ist.
Gruß Hardy
|
Re: Marlin 2.0.7, MKS_L v.2.1, TMC2209 v.3 - Achsen bewegen 09. March 2021 15:42 |
Registrierungsdatum: 9 Jahre zuvor Beiträge: 1.610 |
Aktiviere in der configuration_adv.h die Zeile 2587.
Sende über USB (Arduino serieller Monitor) ein M122, um den Status der Treiber zu sehen.
Anscheinend mußt Du wohl für das MKS Gen L 2.1 mit Mega2560 die Pins-Dateien ergänzen:
[forum.v1engineering.com]
Du findest die beiden Dateien im Ordner Marlin/src/pins/ramps.
Alternativ läßt Du das mit dem UART-Modus und nutzt TMC2209_STANDALONE.
Herzl. Grüße
Sende über USB (Arduino serieller Monitor) ein M122, um den Status der Treiber zu sehen.
Anscheinend mußt Du wohl für das MKS Gen L 2.1 mit Mega2560 die Pins-Dateien ergänzen:
[forum.v1engineering.com]
Du findest die beiden Dateien im Ordner Marlin/src/pins/ramps.
Alternativ läßt Du das mit dem UART-Modus und nutzt TMC2209_STANDALONE.
Herzl. Grüße
|
Re: Marlin 2.0.7, MKS_L v.2.1, TMC2209 v.3 - Achsen bewegen 10. March 2021 01:43 |
Registrierungsdatum: 5 Jahre zuvor Beiträge: 143 |
|
Re: Marlin 2.0.7, MKS_L v.2.1, TMC2209 v.3 - Achsen bewegen 10. March 2021 06:22 |
Registrierungsdatum: 4 Jahre zuvor Beiträge: 199 |
Beim Gen L 2.1 hat sich die Pinbelegung gegenüber der 1.0 etwas geändert, für den UART-Modus müssen ein paar Jumper auf dem Board entsprechend gesetzt sein. Bilder dazu u.a. hier:[www.coqaulores.de]
|
Re: Marlin 2.0.7, MKS_L v.2.1, TMC2209 v.3 - Achsen bewegen 10. March 2021 11:19 |
Registrierungsdatum: 3 Jahre zuvor Beiträge: 49 |
Danke für die Anregungen.
Habe weiter recherchiert und es scheint an der falschen Belegung oder Bezeichnung der Pins am TMC2209 zu liegen.
Dadurch verbindet der UART-Jumper die falschen Pins. Die angebotenen Lösungen sind teils abenteuerlich, von verschiedenen Lötbrücken bis zu abgeschnittenen Pins.
Muß mich weiter informieren, bevor ich irgendein Blödsinn mache.
Mein Board ist v.2.1 und der UART-Jumper liegt unter dem Driver, auf dem Bild von PePa sind die UART-Pins unterhalb der Driver, das ist v.2.0 und nicht wie angepriesen v.2.1.
Schade nur, daß man an dem Chip selber nichts messen kann, um die Pin-Zuordnung festzustellen.
Gruß Hardy
3-mal bearbeitet. Zuletzt am 10.03.21 11:34.
Habe weiter recherchiert und es scheint an der falschen Belegung oder Bezeichnung der Pins am TMC2209 zu liegen.
Dadurch verbindet der UART-Jumper die falschen Pins. Die angebotenen Lösungen sind teils abenteuerlich, von verschiedenen Lötbrücken bis zu abgeschnittenen Pins.
Muß mich weiter informieren, bevor ich irgendein Blödsinn mache.
Mein Board ist v.2.1 und der UART-Jumper liegt unter dem Driver, auf dem Bild von PePa sind die UART-Pins unterhalb der Driver, das ist v.2.0 und nicht wie angepriesen v.2.1.
Schade nur, daß man an dem Chip selber nichts messen kann, um die Pin-Zuordnung festzustellen.
Gruß Hardy
3-mal bearbeitet. Zuletzt am 10.03.21 11:34.
|
Re: Marlin 2.0.7, MKS_L v.2.1, TMC2209 v.3 - Achsen bewegen 10. March 2021 11:41 |
Registrierungsdatum: 9 Jahre zuvor Beiträge: 1.610 |
Normalerweise sollte die Verbindung TX/RX ja gerade auf dem board stattfinden.
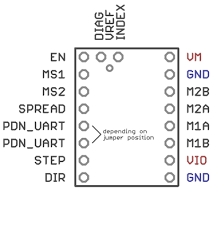
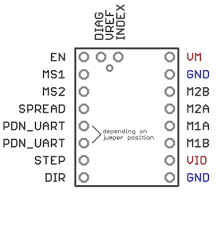
Welche Treiber hast Du denn (siehe Anhänge)?
Gibt es nicht irgendwo einen Schaltplan von dieser Version des Gen L 2.1?
Herzl. Grüße
Habe was gefunden:
[github.com]
Die Pin-Belegung des spanischen Kollegen scheint zu stimmen.
1-mal bearbeitet. Zuletzt am 10.03.21 12:44.
Welche Treiber hast Du denn (siehe Anhänge)?
Gibt es nicht irgendwo einen Schaltplan von dieser Version des Gen L 2.1?
Herzl. Grüße
Habe was gefunden:
[github.com]
Die Pin-Belegung des spanischen Kollegen scheint zu stimmen.
1-mal bearbeitet. Zuletzt am 10.03.21 12:44.
|
Re: Marlin 2.0.7, MKS_L v.2.1, TMC2209 v.3 - Achsen bewegen 10. March 2021 13:14 |
Registrierungsdatum: 3 Jahre zuvor Beiträge: 49 |
Bild "img_20210310_183646uojx6.jpg" anzeigen.
Bild "img_20210310_182900jtkjj.jpg" anzeigen.
Bild "img_20210310_183924u9kfs.jpg" anzeigen.
Auf dem Bild des Boards ist unterhalb der Drives zu sehen, daß die 2 UART-Pins fehlen. Der Jumper wird unter dem Driver gemäß dem Video, das du mir verlinkt hast, eingesetzt (die 2 pins in der 2.Reihe von der grünen Leiste)
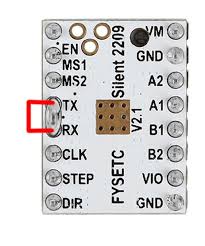
Auf dem Foto des Drives sind die Pin-Bezeichnungen zu sehen. Die Pins RX und CLK gehen beide auf den einen grünen Pin neben dem schwarzen Pin unmittelbar hinter der grünen Leiste.
Jetzt habe ich eine vorgeschlagene Lösung gefunden, den Jumper schräg (vom Pin aus der 2.Reihe zu dem Pin mit der Verbindung zu RX+CLK) zu setzen.
Habe ich versucht, aber im Status heiß es nach wie vor X und Y nicht verbunden.
Schaltbild des MKS GEN L v.2.1 habe ich nirgends gefunden.
Gruß Hardy
6-mal bearbeitet. Zuletzt am 10.03.21 13:38.
Bild "img_20210310_182900jtkjj.jpg" anzeigen.
Bild "img_20210310_183924u9kfs.jpg" anzeigen.
Auf dem Bild des Boards ist unterhalb der Drives zu sehen, daß die 2 UART-Pins fehlen. Der Jumper wird unter dem Driver gemäß dem Video, das du mir verlinkt hast, eingesetzt (die 2 pins in der 2.Reihe von der grünen Leiste)
Auf dem Foto des Drives sind die Pin-Bezeichnungen zu sehen. Die Pins RX und CLK gehen beide auf den einen grünen Pin neben dem schwarzen Pin unmittelbar hinter der grünen Leiste.
Jetzt habe ich eine vorgeschlagene Lösung gefunden, den Jumper schräg (vom Pin aus der 2.Reihe zu dem Pin mit der Verbindung zu RX+CLK) zu setzen.
Habe ich versucht, aber im Status heiß es nach wie vor X und Y nicht verbunden.
Schaltbild des MKS GEN L v.2.1 habe ich nirgends gefunden.
Gruß Hardy
6-mal bearbeitet. Zuletzt am 10.03.21 13:38.
|
Re: Marlin 2.0.7, MKS_L v.2.1, TMC2209 v.3 - Achsen bewegen 10. March 2021 13:35 |
Registrierungsdatum: 9 Jahre zuvor Beiträge: 1.610 |
Schaltplan habe ich oben verlinkt. Wenn Du die MKS-Treiber hast, dann passt das.
Der Fehler kommt durch die unvollständigen PIN-Dateien, das Board hat wahrscheinlich kaum jemand,
dann fällt das nicht auf. Das ist nicht außergewöhnlich.
Herzl. Grüße
[forum.fysetc.com]
1-mal bearbeitet. Zuletzt am 10.03.21 13:41.
Der Fehler kommt durch die unvollständigen PIN-Dateien, das Board hat wahrscheinlich kaum jemand,
dann fällt das nicht auf. Das ist nicht außergewöhnlich.
Herzl. Grüße
[forum.fysetc.com]
1-mal bearbeitet. Zuletzt am 10.03.21 13:41.
|
Re: Marlin 2.0.7, MKS_L v.2.1, TMC2209 v.3 - Achsen bewegen 10. March 2021 13:47 |
Registrierungsdatum: 3 Jahre zuvor Beiträge: 49 |
|
Re: Marlin 2.0.7, MKS_L v.2.1, TMC2209 v.3 - Achsen bewegen 10. March 2021 14:54 |
Registrierungsdatum: 9 Jahre zuvor Beiträge: 1.610 |
|
Re: Marlin 2.0.7, MKS_L v.2.1, TMC2209 v.3 - Achsen bewegen 11. March 2021 07:56 |
Registrierungsdatum: 3 Jahre zuvor Beiträge: 49 |
Ich bin leider wieder am Anfang.
Nach eueren Tipps konnte ich nur eins feststellen:
Board gemäß board.h richtig ausgewählt MKS GEN L v.21
Treiber richtig ausgewählt - TMC 2209 v.3.0 - bei mir stimmt die Pin-Belegung, keine Korrekturen nötig
Pin-Dateien stimmen
Configuration.h gemäß Anleitung eingestellt - auch verschiedene Slave-Adressen probiert
dsgl. auch _adv.h gemäß Anleitung eingestellt
Jumper gemäß MKS-Video für v.21 richtig gesetzt
Trotzdem ständig die Meldung "TMC Verbindungsfehler" und M122 - "x/y nicht verbunden."
Ich danke euch aber ich gib es auf (was normalerweise nicht meine Art ist) und versuche es mit TMC2209_STANDALONE, vielleicht habe ich mehr Glück.
Gruß Hardy
PS: Da lobe ich mir meine CNC-Fräse - Eigenbau + ESTLCAM drauf und läuft von Anfang an ohne Probleme. Mit Marlin ist es eine Doktor-Arbeit!
1-mal bearbeitet. Zuletzt am 11.03.21 08:01.
Nach eueren Tipps konnte ich nur eins feststellen:
Board gemäß board.h richtig ausgewählt MKS GEN L v.21
Treiber richtig ausgewählt - TMC 2209 v.3.0 - bei mir stimmt die Pin-Belegung, keine Korrekturen nötig
Pin-Dateien stimmen
Configuration.h gemäß Anleitung eingestellt - auch verschiedene Slave-Adressen probiert
dsgl. auch _adv.h gemäß Anleitung eingestellt
Jumper gemäß MKS-Video für v.21 richtig gesetzt
Trotzdem ständig die Meldung "TMC Verbindungsfehler" und M122 - "x/y nicht verbunden."
Ich danke euch aber ich gib es auf (was normalerweise nicht meine Art ist) und versuche es mit TMC2209_STANDALONE, vielleicht habe ich mehr Glück.
Gruß Hardy
PS: Da lobe ich mir meine CNC-Fräse - Eigenbau + ESTLCAM drauf und läuft von Anfang an ohne Probleme. Mit Marlin ist es eine Doktor-Arbeit!
1-mal bearbeitet. Zuletzt am 11.03.21 08:01.
|
Re: Marlin 2.0.7, MKS_L v.2.1, TMC2209 v.3 - Achsen bewegen 15. March 2021 13:21 |
Registrierungsdatum: 3 Jahre zuvor Beiträge: 49 |
Bin schon wieder da mit einer Bitte um Hilfe.
Mit der Variante TMC2209_STANDALONE komme ich jetzt besser zurecht. Auch auf das sensorless homing habe ich verzichtet.
Für X/Y-Achse verwende ich mechanische Endschalter, für die Z_Achse einen induktiven Näherungsschalter.
Und hier liegt das Problem.
Der Sensor ist ein PNP - NO, also bekomme ich Signal bei Annäherung an das Bett. Die Funktion habe ich überprüft, der Sensor ist in Ordnung.
Aber eingebaut, bekomme ich mit M119 überprüft, die Meldung "Triggered", egal betätigt oder unbetätigt.
Nach INVERTING ist die Meldung "open", ebenfalls egal ob betätigt oder nicht.
Heißt das, das ich einen anderen Sensor benötige?
Da es PNP in NO und NC und NPN ebenfalls in NO und NC gibt, ist es egal? Hauptsächlich NC ?
Gruß Hardy
Mit der Variante TMC2209_STANDALONE komme ich jetzt besser zurecht. Auch auf das sensorless homing habe ich verzichtet.
Für X/Y-Achse verwende ich mechanische Endschalter, für die Z_Achse einen induktiven Näherungsschalter.
Und hier liegt das Problem.
Der Sensor ist ein PNP - NO, also bekomme ich Signal bei Annäherung an das Bett. Die Funktion habe ich überprüft, der Sensor ist in Ordnung.
Aber eingebaut, bekomme ich mit M119 überprüft, die Meldung "Triggered", egal betätigt oder unbetätigt.
Nach INVERTING ist die Meldung "open", ebenfalls egal ob betätigt oder nicht.
Heißt das, das ich einen anderen Sensor benötige?
Da es PNP in NO und NC und NPN ebenfalls in NO und NC gibt, ist es egal? Hauptsächlich NC ?
Gruß Hardy
|
Re: Marlin 2.0.7, MKS_L v.2.1, TMC2209 v.3 - Achsen bewegen 15. March 2021 13:32 |
Moderator Registrierungsdatum: 6 Jahre zuvor Beiträge: 820 |
Wie hast Du das Signal denn überprüft, hat der Initiator eine Status-LED?
Welche Spannung liegt am Signalausgang des Sensors (gegen GND gemessen) in welchem Schaltzustand an?
/Julien
Wer rasiert mit mir KingKong? Der wichtigste Guide - Triffid Hunter's Calibration Guide
Drucker:
CoreXY in 2502x300 - geschlossen & beheizt für ABS - Duet2WiFi - Eigenbau Wasserkühlung
Eigenbau I3 - V6-Clon- Profilrahmen - Ramps 1.4 24V - TMC2208 - Simplify3D - Octoprint - Marlin 1.1.8
Welche Spannung liegt am Signalausgang des Sensors (gegen GND gemessen) in welchem Schaltzustand an?
/Julien
Wer rasiert mit mir KingKong? Der wichtigste Guide - Triffid Hunter's Calibration Guide
Drucker:
CoreXY in 2502x300 - geschlossen & beheizt für ABS - Duet2WiFi - Eigenbau Wasserkühlung
Eigenbau I3 - V6-Clon- Profilrahmen - Ramps 1.4 24V - TMC2208 - Simplify3D - Octoprint - Marlin 1.1.8
|
Re: Marlin 2.0.7, MKS_L v.2.1, TMC2209 v.3 - Achsen bewegen 15. March 2021 14:17 |
Registrierungsdatum: 3 Jahre zuvor Beiträge: 49 |
|
Re: Marlin 2.0.7, MKS_L v.2.1, TMC2209 v.3 - Achsen bewegen 15. March 2021 14:39 |
Registrierungsdatum: 11 Jahre zuvor Beiträge: 3.969 |
Das ist ein untypisches Verhalten. Bei einem NPN hast du am Ausgang nichts oder GND. Beim PNP Versorgungsspannung oder GND. Nie direkt anschließen. Immer eine Diode in Sperrrichtung für die + Spannung, so dass nur GND geschaltet wird.
Vielleicht hast Du ja schon das Port gehimmelt. Mache mal einen Versuch.
Lege mal +5 V an und schau.
Und dann GND und schau, ob sich was tut.
Liebe Grüße aus Kaltenkirchen.
Frithjof
Meine Seite
[www.facebook.com]
Vielleicht hast Du ja schon das Port gehimmelt. Mache mal einen Versuch.
Lege mal +5 V an und schau.
Und dann GND und schau, ob sich was tut.
Liebe Grüße aus Kaltenkirchen.
Frithjof
Meine Seite
[www.facebook.com]
|
Re: Marlin 2.0.7, MKS_L v.2.1, TMC2209 v.3 - Achsen bewegen 15. March 2021 16:03 |
Registrierungsdatum: 9 Jahre zuvor Beiträge: 1.610 |
|
Re: Marlin 2.0.7, MKS_L v.2.1, TMC2209 v.3 - Achsen bewegen 16. March 2021 08:28 |
Registrierungsdatum: 3 Jahre zuvor Beiträge: 49 |
Quote
Fridi
Bei einem NPN hast du am Ausgang nichts oder GND. Beim PNP Versorgungsspannung oder GND.
Da bin ich mir nicht ganz sicher. Bei beiden Typen gibt es NO und NC.
Quote
Fridi
Nie direkt anschließen. Immer eine Diode in Sperrrichtung für die + Spannung, so dass nur GND geschaltet wird.
?? Natürlich habe ich den Sensor direkt an der Z-Endstopp-Buchse angeschlossen. Der Sensor besitzt einen Verpolungsschutz.
An der Buchse funktioniert alles bestens, wenn ich manuell 5V oder 0V anlege. (Mit M119 kontrolliert).
Den Sensor habe ich mit 12V geprüft. Funktioniert ebenfalls einwandfrei. Leider eben nicht für 5V geeignet (6-40V), wie ich geschrieben habe. Habe es erst nachträglich gemerkt. Muß ich mir einen neuen besorgen,
Quote
AlterBastler
Pullup für Z-Endstop ausgeschaltet?
Bei dem neuen Sensor denke ich dran. Nur welche Ausführung soll ich mir anschaffen? Für meine Begriffe wäre es eigentlich egal, kommt darauf an wie ich den dann konfiguriere, oder?
Oder soll ich den vorhandenen an 24V anschließen und den Ausgang mit einem Widerstandsteiler auf 5V begrenzen?
Danke für euere Tipps.
Gruß Hardy
1-mal bearbeitet. Zuletzt am 16.03.21 08:40.
|
Re: Marlin 2.0.7, MKS_L v.2.1, TMC2209 v.3 - Achsen bewegen 16. March 2021 10:28 |
Registrierungsdatum: 11 Jahre zuvor Beiträge: 3.969 |
Bei einem NPN kommt eigentlich nur GND oder nichts raus. Den habe ich direkt über eine Diode ans Board angeschlossen. N O oder NC sagt nur aus, ob der Kontakt normal offen oder normal geschlossen ist.
Liebe Grüße aus Kaltenkirchen.
Frithjof
Meine Seite
[www.facebook.com]
Liebe Grüße aus Kaltenkirchen.
Frithjof
Meine Seite
[www.facebook.com]
|
Re: Marlin 2.0.7, MKS_L v.2.1, TMC2209 v.3 - Achsen bewegen 20. March 2021 14:19 |
Registrierungsdatum: 3 Jahre zuvor Beiträge: 49 |
nichts ???Quote
Fridi
Bei einem NPN kommt eigentlich nur GND oder nichts raus.
Hallo,
jetzt habe ich einen neuen induktiven Sensor NPN – NO bekommen und bin wahnsinnig enttäuscht, auch den bekomme ich nicht in den Griff!
Ohne eure Hilfe bin ich aufgeschmissen.
Vorab habe ich Folgendes überprüft:
Den Sensor mit 12V getestet –
nicht betätigt 12V am Signal-Anschluß
betätigt 0V am Signal-Anschluß
→ also OK
Den Z_Endstop_min (INVERTING true) am Board mit einem mechanischen Endschalter überprüft
nicht betätigt → M119 - „open“
betätigt → M119 - „triggered“
→ ebenfalls OK
Dann den Sensor am Z_Endstop_min angeschlossen (Signal und Masse) Versorgungsspannung vom Boardanschluß (24V),
Signal-Leitung ist mit Widerstandsteiler auf 5V beschränkt.
In der Configuration.h:
#define USE_ZMIN_PLUG
//#define ENDSTOPPULLUP_ZMIN
//#define ENDSTOPPULLUP_ZMIN_PROBE
#define Z_MIN_ENDSTOP_INVERTING false
#define Z_MIN_PROBE_ENDSTOP_INVERTING false
#define Z_MIN_PROBE_USES_Z_MIN_ENDSTOP_PIN
#define USE_PROBE_FOR_Z_HOMING
#define FIX_MOUNTED_PROBE
Ergebnis:
Egal ob INVERTING true oder false – M119 zeigt immer „open“ an.
Spannung am Signal-Pin immer 4,2V wird beim Betätigen des Sensors nicht gegen Masse herunter gezogen. Keine Ahnung warum nicht. Beim Test mit 12V-Akku ging's.
Alles entspricht auch der Anleitung hier: [www.clickoslo.com]
Kleiner Trost ist, daß ich nicht der Einzige bin, mit diesem Problem. Aber alles was allen geraten wird, läuft auf die obige Einstellungen hinaus.
Was mache ich falsch? Ich kann die Z-Achse einfach nicht stoppen.
Gruß Hardy
1-mal bearbeitet. Zuletzt am 20.03.21 14:21.
|
Re: Marlin 2.0.7, MKS_L v.2.1, TMC2209 v.3 - Achsen bewegen 20. March 2021 19:35 |
Registrierungsdatum: 11 Jahre zuvor Beiträge: 3.969 |
Hast du den Pullup Wiederstand am Pin eingeschaltet.
Versuche jetzt einfach GND an den Pin zu legen. Jezt sollte sich mit M119 eine Änderung ergeben. Nichts anderes macht der Sensor. Er legt GND an den Pin oder nichts. Widerstände benötigst du nicht, da ja die 24V nicht auf den Pin gehen. Aber zur Sicherheit ( Ich hatte mal einen Sensor, der plötzlich 12V ausgab ) schalte eine Diode mit Spitze zum Sensor in Reihe ein.
Liebe Grüße aus Kaltenkirchen.
Frithjof
Meine Seite
[www.facebook.com]
Versuche jetzt einfach GND an den Pin zu legen. Jezt sollte sich mit M119 eine Änderung ergeben. Nichts anderes macht der Sensor. Er legt GND an den Pin oder nichts. Widerstände benötigst du nicht, da ja die 24V nicht auf den Pin gehen. Aber zur Sicherheit ( Ich hatte mal einen Sensor, der plötzlich 12V ausgab ) schalte eine Diode mit Spitze zum Sensor in Reihe ein.
Liebe Grüße aus Kaltenkirchen.
Frithjof
Meine Seite
[www.facebook.com]
|
Re: Marlin 2.0.7, MKS_L v.2.1, TMC2209 v.3 - Achsen bewegen 21. March 2021 03:33 |
Registrierungsdatum: 9 Jahre zuvor Beiträge: 1.610 |
[www.digikey.de]Quote
Versorgungsspannung vom Boardanschluß (24V)
Beim Test mit 12V-Akku ging's
Herzl. Grüße
|
Re: Marlin 2.0.7, MKS_L v.2.1, TMC2209 v.3 - Achsen bewegen 21. March 2021 06:55 |
Registrierungsdatum: 11 Jahre zuvor Beiträge: 3.969 |
Die große Gefahr bei einem Widerstandsarray ist, das Board stirbt, wenn an dem Array die Masse weg ist weil die Masse weg ist. Dann wird das Potential nicht mehr auf 5V runtergezogen.
Ich bin kein Freund von solchen Sachen. Man bastelt einfach zu viel am Drucker und da passiert es schon mal, dass ein Draht abbricht.
1-mal bearbeitet. Zuletzt am 21.03.21 06:59.
Liebe Grüße aus Kaltenkirchen.
Frithjof
Meine Seite
[www.facebook.com]
Ich bin kein Freund von solchen Sachen. Man bastelt einfach zu viel am Drucker und da passiert es schon mal, dass ein Draht abbricht.
1-mal bearbeitet. Zuletzt am 21.03.21 06:59.
Liebe Grüße aus Kaltenkirchen.
Frithjof
Meine Seite
[www.facebook.com]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
In diesem Forum dürfen leider nur registrierte Teilnehmer schreiben.