Ich brauche Hilfe
geschrieben von Kryptoo
|
Ich brauche Hilfe 04. May 2012 16:28 |
Registrierungsdatum: 11 Jahre zuvor Beiträge: 489 |
Hallo,
Ich versuche gerde Krampfhaft meinen RepRap zum laufen zu bekommen.
Ich verwende ein megaboard mit Ramps 1.4 (was auch immer das bedeutet)
Ich habe die Motoren und Extruder schon angeschlossen.
Die Firmware von Márlin habe ich auf das Board gepackt und nun wollte ich versuchen ob sich da schon etwas rühert.
LEIDER NICHT
Es ergebén sich für mich 2 Fragen.
1. auf dem Obersten Board wo auch die kleinen Treiber für die Motore sitzen, muß da Strom angeschlossen werden? Wenn ja dann mit ATX Netzteil oder wie?
Das Mega hat ja schon eine eigene Stromversorgung.
2. Wie kann ich testen ob alles richtig angeschlossen ist?
MFG Kryptoo
Ich versuche gerde Krampfhaft meinen RepRap zum laufen zu bekommen.
Ich verwende ein megaboard mit Ramps 1.4 (was auch immer das bedeutet)
Ich habe die Motoren und Extruder schon angeschlossen.
Die Firmware von Márlin habe ich auf das Board gepackt und nun wollte ich versuchen ob sich da schon etwas rühert.
LEIDER NICHT
Es ergebén sich für mich 2 Fragen.
1. auf dem Obersten Board wo auch die kleinen Treiber für die Motore sitzen, muß da Strom angeschlossen werden? Wenn ja dann mit ATX Netzteil oder wie?
Das Mega hat ja schon eine eigene Stromversorgung.
2. Wie kann ich testen ob alles richtig angeschlossen ist?
MFG Kryptoo
|
Re: Ich brauche Hilfe 04. May 2012 16:33 |
Registrierungsdatum: 13 Jahre zuvor Beiträge: 443 |
|
Re: Ich brauche Hilfe 04. May 2012 16:46 |
Registrierungsdatum: 11 Jahre zuvor Beiträge: 489 |
Diese Seite habe ich mir schon etwa 100x durchgelesen ;-(
Ich finde das nicht gut erleutert.
Ich verstehe das mit der Stromversorgung nicht.
Das Mega ist per usb (5V) mit PC verbunden,zusätzlich ist an dem Board noch ein Netzteil welches 12V 7A liefert drann.
An dem Board was auf das Mega gesteckt wird ist auch noch ein Stromanschluß. (Muß da auch noch Strom drann?
Ich finde das nicht gut erleutert.
Ich verstehe das mit der Stromversorgung nicht.
Das Mega ist per usb (5V) mit PC verbunden,zusätzlich ist an dem Board noch ein Netzteil welches 12V 7A liefert drann.
An dem Board was auf das Mega gesteckt wird ist auch noch ein Stromanschluß. (Muß da auch noch Strom drann?
|
Re: Ich brauche Hilfe 04. May 2012 17:06 |
Registrierungsdatum: 11 Jahre zuvor Beiträge: 489 |
|
Re: Ich brauche Hilfe 04. May 2012 17:26 |
Registrierungsdatum: 14 Jahre zuvor Beiträge: 7.505 |
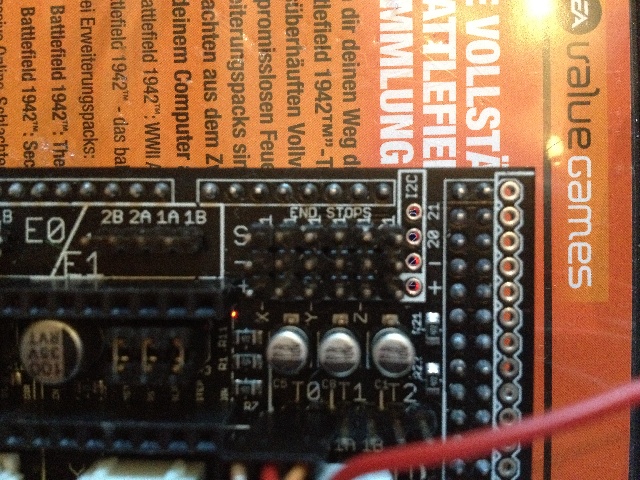
Sehr Hilfreich ist schon mal das Bild:
Was du da siehst ist das "Shield"(also das Ramps) der Arduino ist da drunter, der bekommt nur den USB, sonst nix.
Der Arduino bekommt seine Stromversorgung schon vom USB... Aber die Motoren brauchen erheblich mehr wie die USB liefern kann. Das wird dann über die "Klemmen" an dem Shield geliefert.
Aber ich glaube du solltest mal genauer beschreiben was du da bisher gemacht hast.... mir scheint da müssen wir ganz klein anfangen
Mfg
Wolfgang
Erfahrungen kann man leider schlecht weiter geben, die muss man selber machen.

Was du da siehst ist das "Shield"(also das Ramps) der Arduino ist da drunter, der bekommt nur den USB, sonst nix.
Der Arduino bekommt seine Stromversorgung schon vom USB... Aber die Motoren brauchen erheblich mehr wie die USB liefern kann. Das wird dann über die "Klemmen" an dem Shield geliefert.
Aber ich glaube du solltest mal genauer beschreiben was du da bisher gemacht hast.... mir scheint da müssen wir ganz klein anfangen
Mfg
Wolfgang
| Aller Anfang war schwer - Wolfstrap | Reprap-fab.org |  |
Erfahrungen kann man leider schlecht weiter geben, die muss man selber machen.
|
Re: Ich brauche Hilfe 04. May 2012 18:27 |
Registrierungsdatum: 11 Jahre zuvor Beiträge: 489 |
Ja gaaanz klein;-)
Also der Drucker ist fertig aufgebaut .
Ich bin kein Elektronik Experte ( leider ) Und genau das ist mein Problem :-(
Ich habe jetzt alles so angeschlossen wie oben beschrieben , nur
die Endschalter sind noch nicht angeschlossen.
Dann habe ich die Firmeware ( Marlin ) auf das Mega gespielt.
Danach habe ich versucht mit RepRap- Host bzw. Replikator G die
Achsen probehalber zu bewegen.
Leider ohne Erfolg
Ich benutze Windows 7 64 Bit
Also der Drucker ist fertig aufgebaut .
Ich bin kein Elektronik Experte ( leider ) Und genau das ist mein Problem :-(
Ich habe jetzt alles so angeschlossen wie oben beschrieben , nur
die Endschalter sind noch nicht angeschlossen.
Dann habe ich die Firmeware ( Marlin ) auf das Mega gespielt.
Danach habe ich versucht mit RepRap- Host bzw. Replikator G die
Achsen probehalber zu bewegen.
Leider ohne Erfolg
Ich benutze Windows 7 64 Bit
|
Re: Ich brauche Hilfe 04. May 2012 18:45 |
Registrierungsdatum: 13 Jahre zuvor Beiträge: 443 |
|
Re: Ich brauche Hilfe 04. May 2012 18:46 |
Registrierungsdatum: 14 Jahre zuvor Beiträge: 7.505 |
Nimm mal besser den Printrun oder den Repetier...
Den Reprap-Host würde ich erst mal vergessen. Der Replikator ist so ne Sache...
Ich will den nicht schlecht reden, aber besser kommst du mit dem Host von dem Repetier oder dem Printrun klar.
Die Endschalter solltest du anschließen, denn die Motoren laufen nur vernünftig wenn die dran sind. Es sei denn du schaltest die in der Firmware ab.
Mfg
Wolfgang
Erfahrungen kann man leider schlecht weiter geben, die muss man selber machen.
Den Reprap-Host würde ich erst mal vergessen. Der Replikator ist so ne Sache...
Ich will den nicht schlecht reden, aber besser kommst du mit dem Host von dem Repetier oder dem Printrun klar.
Die Endschalter solltest du anschließen, denn die Motoren laufen nur vernünftig wenn die dran sind. Es sei denn du schaltest die in der Firmware ab.
Mfg
Wolfgang
| Aller Anfang war schwer - Wolfstrap | Reprap-fab.org | |
Erfahrungen kann man leider schlecht weiter geben, die muss man selber machen.
|
Re: Ich brauche Hilfe 04. May 2012 19:29 |
Registrierungsdatum: 11 Jahre zuvor Beiträge: 489 |
So hab jetzt printrun am start
bekomme folgende Fehlermeldung
start
Printer is now online.
echo: External Reset
Marlin: 1.0.0 RC2
echo: Last Updated: 2012-05-02 | Author: erik
echo: Free Memory: 5609 PlannerBufferBytes: 1232
echo:Using Default settings:
Error:0
: Extruder switched off. MAXTEMP triggered !
Error rinter stopped deu to errors. Fix the error and use M999 to restart!. (Temperature is reset. Set it before restarting)
rinter stopped deu to errors. Fix the error and use M999 to restart!. (Temperature is reset. Set it before restarting)
Setting hotend temperature to 0.000000 degrees Celsius.
Printer stopped deu to errors. Fix the error and use M999 to restart!. (Temperature is reset. Set it before restarting)
Printer stopped deu to errors. Fix the error and use M999 to restart!. (Temperature is reset. Set it before restarting)
Printer stopped deu to errors. Fix the error and use M999 to restart!. (Temperature is reset. Set it before restarting)
bekomme folgende Fehlermeldung
start
Printer is now online.
echo: External Reset
Marlin: 1.0.0 RC2
echo: Last Updated: 2012-05-02 | Author: erik
echo: Free Memory: 5609 PlannerBufferBytes: 1232
echo:Using Default settings:
Error:0
: Extruder switched off. MAXTEMP triggered !
Error
rinter stopped deu to errors. Fix the error and use M999 to restart!. (Temperature is reset. Set it before restarting)Setting hotend temperature to 0.000000 degrees Celsius.
Printer stopped deu to errors. Fix the error and use M999 to restart!. (Temperature is reset. Set it before restarting)
Printer stopped deu to errors. Fix the error and use M999 to restart!. (Temperature is reset. Set it before restarting)
Printer stopped deu to errors. Fix the error and use M999 to restart!. (Temperature is reset. Set it before restarting)
|
Re: Ich brauche Hilfe 04. May 2012 19:41 |
Registrierungsdatum: 13 Jahre zuvor Beiträge: 443 |
|
Re: Ich brauche Hilfe 04. May 2012 20:06 |
Registrierungsdatum: 14 Jahre zuvor Beiträge: 7.505 |
Irgendwo Isolierung unter den Klemmen ?.... eine Verbindung nicht OK.
Auf so was solltest du achten. Ich hab da schon Leute gehabt die haben Isolierungen der Kabel mit unter die Klemmen getan.
Nicht das ich dir was unterstellen wollte.... aber wenn ich klein anfange ....muss ich alles mit ein beziehen.
Mfg
Wolfgang
Erfahrungen kann man leider schlecht weiter geben, die muss man selber machen.
Auf so was solltest du achten. Ich hab da schon Leute gehabt die haben Isolierungen der Kabel mit unter die Klemmen getan.
Nicht das ich dir was unterstellen wollte.... aber wenn ich klein anfange ....muss ich alles mit ein beziehen.
Mfg
Wolfgang
| Aller Anfang war schwer - Wolfstrap | Reprap-fab.org | |
Erfahrungen kann man leider schlecht weiter geben, die muss man selber machen.
|
Re: Ich brauche Hilfe 04. May 2012 21:23 |
Registrierungsdatum: 11 Jahre zuvor Beiträge: 489 |
|
Re: Ich brauche Hilfe 04. May 2012 21:27 |
Registrierungsdatum: 11 Jahre zuvor Beiträge: 489 |
Ich glaube wenn ich das Ding zum laufen bekomme
, dann werde ich für diese ganze Elektronik-Sache mal eine Schritt
für Schritt Anleitung schreiben ( in Deutsch )
Die Mechanik ist für den Prusa gut beschrieben, aber die Elektronik bzw das erste Starten
Ist überall im Netz verstreut.
, dann werde ich für diese ganze Elektronik-Sache mal eine Schritt
für Schritt Anleitung schreiben ( in Deutsch )
Die Mechanik ist für den Prusa gut beschrieben, aber die Elektronik bzw das erste Starten
Ist überall im Netz verstreut.
|
Re: Ich brauche Hilfe 05. May 2012 13:32 |
Registrierungsdatum: 12 Jahre zuvor Beiträge: 43 |
Hi
Also ich bin gerade ungefähr soweit wie du, verwende Sprinter und Pronterface, hatte aber ein ähnliches Problem! Konnte ich dann beheben indem ich einfach mal einen Thermistor an die vorgesehenen Pins gesteckt habe (Siehe Bild dass Stoffel15 oben gepostet hat), die Host Software scheint da automatisch abzuschalten wenn keiner angeschlossen ist! Solltest dann mit den Motoren bzw den Treibern kommunizieren können!
Also ich bin gerade ungefähr soweit wie du, verwende Sprinter und Pronterface, hatte aber ein ähnliches Problem! Konnte ich dann beheben indem ich einfach mal einen Thermistor an die vorgesehenen Pins gesteckt habe (Siehe Bild dass Stoffel15 oben gepostet hat), die Host Software scheint da automatisch abzuschalten wenn keiner angeschlossen ist! Solltest dann mit den Motoren bzw den Treibern kommunizieren können!
|
Re: Ich brauche Hilfe 05. May 2012 14:48 |
Registrierungsdatum: 11 Jahre zuvor Beiträge: 489 |
Ohh nein :-(
Ich glaube ich hab 2 pololu geschrottet.
Der eine geht beim testcode nur noch in eine Richtung, und der andere macht garnichts mehr :-(((
Kann ich die dinger nachbestellen? Wenn dann wo?
Ich habe dann einen heilen Treiber auf allen Plätzen versucht, da gingen alle Achsen.
Kann ich die Dinger durchmessen?
Würden auch die hier gehen? A4988 Stepper Motor Driver Carrier
MFG Kryptoo
1-mal bearbeitet. Zuletzt am 05.05.12 14:53.
Ich glaube ich hab 2 pololu geschrottet.
Der eine geht beim testcode nur noch in eine Richtung, und der andere macht garnichts mehr :-(((
Kann ich die dinger nachbestellen? Wenn dann wo?
Ich habe dann einen heilen Treiber auf allen Plätzen versucht, da gingen alle Achsen.
Kann ich die Dinger durchmessen?
Würden auch die hier gehen? A4988 Stepper Motor Driver Carrier
MFG Kryptoo
1-mal bearbeitet. Zuletzt am 05.05.12 14:53.
|
Re: Ich brauche Hilfe 05. May 2012 17:13 |
Registrierungsdatum: 11 Jahre zuvor Beiträge: 489 |
|
Re: Ich brauche Hilfe 05. May 2012 17:52 |
Registrierungsdatum: 12 Jahre zuvor Beiträge: 28 |
Hallo,
sind Deine Pololus richtig aufgesteckt? das kleine Poti auf dem Platinchen sollte jeweils rechts sein, wenn das ramps so wie auf dem Bild vor Dir liegt
Hast Du die Potis zuerst nach links gedreht? dann vorsichtig nach rechts drehen, bis der Motor läuft
Niemals die Pololus oder die Motorstecker unter Spannung ein oder ausstecken.
A4988 Stepper Motor Driver Carrier : ist womöglich nur das Platinchen, für das Du Bauteile besorgen und bestücken mußt.( davon rate ich mal dringend ab)
Polulos gibt´s am günstigsten bei GRRF - stepsticks (pololu-clone) sind etwas billiger bei reprapworld.
lg Stefan
1-mal bearbeitet. Zuletzt am 05.05.12 17:54.
sind Deine Pololus richtig aufgesteckt? das kleine Poti auf dem Platinchen sollte jeweils rechts sein, wenn das ramps so wie auf dem Bild vor Dir liegt
Hast Du die Potis zuerst nach links gedreht? dann vorsichtig nach rechts drehen, bis der Motor läuft
Niemals die Pololus oder die Motorstecker unter Spannung ein oder ausstecken.
A4988 Stepper Motor Driver Carrier : ist womöglich nur das Platinchen, für das Du Bauteile besorgen und bestücken mußt.( davon rate ich mal dringend ab)
Polulos gibt´s am günstigsten bei GRRF - stepsticks (pololu-clone) sind etwas billiger bei reprapworld.
lg Stefan
1-mal bearbeitet. Zuletzt am 05.05.12 17:54.
|
Re: Ich brauche Hilfe 05. May 2012 18:25 |
Registrierungsdatum: 11 Jahre zuvor Beiträge: 489 |
Ich möchte euch erst einmal DANKEN für die schnellen Antworten hier im Forum!
Die Stepper-Treiber habe ich so aufgesteckt wie du das beschrieben hast, Potis alle rechts.
Ich denke das ich selbst daran schuld bin das die 2 Pololus Schaden genommen haben.
Ich habe zwar darauf geachtet das alle Stromstecker gezogen waren beim umstecken, aber ich war wohl zu ungeduldig ;-(
evtl war da noch etwas Restspannung drauf.
Ich habe die ganze Steuerelektronik in einem bekannten Shop als fertig Aufgebaut bestellt, nur da stimmte da leider nicht viel
zb. waren die Pololus kreuz und quer auf der Platine gesteckt (auch mal anders rum und Pins nicht belegt usw.) für 170 Euro
ist das echt ne Frechheit!
Naja , mal gut das ich das alles erstmal kontrolliert habe! (ohne Strom)
Ich habe jetzt 2 neue Stepper Treiber bestellt.
Ich hoffe die kommen schnell :-)
Die Stepper-Treiber habe ich so aufgesteckt wie du das beschrieben hast, Potis alle rechts.
Ich denke das ich selbst daran schuld bin das die 2 Pololus Schaden genommen haben.
Ich habe zwar darauf geachtet das alle Stromstecker gezogen waren beim umstecken, aber ich war wohl zu ungeduldig ;-(
evtl war da noch etwas Restspannung drauf.
Ich habe die ganze Steuerelektronik in einem bekannten Shop als fertig Aufgebaut bestellt, nur da stimmte da leider nicht viel
zb. waren die Pololus kreuz und quer auf der Platine gesteckt (auch mal anders rum und Pins nicht belegt usw.) für 170 Euro
ist das echt ne Frechheit!
Naja , mal gut das ich das alles erstmal kontrolliert habe! (ohne Strom)
Ich habe jetzt 2 neue Stepper Treiber bestellt.
Ich hoffe die kommen schnell :-)
|
Re: Ich brauche Hilfe 11. May 2012 14:03 |
Registrierungsdatum: 11 Jahre zuvor Beiträge: 489 |
|
Re: Ich brauche Hilfe 11. May 2012 15:51 |
Registrierungsdatum: 12 Jahre zuvor Beiträge: 201 |
|
Re: Ich brauche Hilfe 12. May 2012 09:41 |
Registrierungsdatum: 11 Jahre zuvor Beiträge: 489 |
Huhu , ich bins mal wieder.
Habe folgende Problematik:
Wenn alle Achsen in der Mitte stehen, und ich per Printrun die Achsen ansteuere, bewegen sie sich in Richtung Endanschlag.
Die Achsen fahren dann auch über den Opto-Anschlag drüber.!
und sie Bewegen sich auch in die andere Richtung , und zwar genau bis zu der Stelle wo ich den Strom angeschaltet habe
und nicht weiter.
Hab mir die Configuration.h angesehen , und bin etwas Ratlos
Habe folgende Problematik:
Wenn alle Achsen in der Mitte stehen, und ich per Printrun die Achsen ansteuere, bewegen sie sich in Richtung Endanschlag.
Die Achsen fahren dann auch über den Opto-Anschlag drüber.!
und sie Bewegen sich auch in die andere Richtung , und zwar genau bis zu der Stelle wo ich den Strom angeschaltet habe
und nicht weiter.
Hab mir die Configuration.h angesehen , und bin etwas Ratlos
|
Re: Ich brauche Hilfe 12. May 2012 11:50 |
Registrierungsdatum: 11 Jahre zuvor Beiträge: 489 |
Hier stimmt etwas mit meinen Einstellungen in der FW nicht.
Die Achsen bewegen sich jetzt Richtung opto-Stop, halten dann auch an , leider geht dann die andere Richtung nicht mehr:-(
Gibt es denn keine Wiki wo genau erklärt wird was alles an der Firmware angepasst werden muß?
Ich möchte nicht so kurz vor dem Ziel scheitern.
Hat jemand eine Lösung für mich?
Ps. Ich suche mir seit Tagen echt ein Wolf im Internet ;-(
selbst im Schlaf beschäftigt mich das blöde Ding
2-mal bearbeitet. Zuletzt am 12.05.12 21:01.
Die Achsen bewegen sich jetzt Richtung opto-Stop, halten dann auch an , leider geht dann die andere Richtung nicht mehr:-(
Gibt es denn keine Wiki wo genau erklärt wird was alles an der Firmware angepasst werden muß?
Ich möchte nicht so kurz vor dem Ziel scheitern.
Hat jemand eine Lösung für mich?
Ps. Ich suche mir seit Tagen echt ein Wolf im Internet ;-(
selbst im Schlaf beschäftigt mich das blöde Ding
2-mal bearbeitet. Zuletzt am 12.05.12 21:01.
|
Re: Ich brauche Hilfe 13. May 2012 04:20 |
Registrierungsdatum: 12 Jahre zuvor Beiträge: 85 |
Hallo,
Einen konkreten Lösungsvorschlag für dein Problem habe ich nicht,
aber generell musst du eigentlich nur etwas in der configuration.h abändern...
Die Seite ist jetzt nicht unbedingt die längste....
Einfach mal eine halbe Stunde Zeit nehmen und von oben bis unten durchlesen(ein paar Englisch-Kenntnisse sollte man haben).
Ich zum Beispiel hatte während der Bauphase drei Probleme, über die ich mir jeweils Stunden den Kopf zerbrach. Jedes mal habe ich verzweifelt ohne jenen Ansatz für eine Lösung in der configuration.h rumgewühlt, und jedes mal das Problem dort beheben können.
gruß,
Marius
1-mal bearbeitet. Zuletzt am 13.05.12 04:22.
Einen konkreten Lösungsvorschlag für dein Problem habe ich nicht,
aber generell musst du eigentlich nur etwas in der configuration.h abändern...
Die Seite ist jetzt nicht unbedingt die längste....
Einfach mal eine halbe Stunde Zeit nehmen und von oben bis unten durchlesen(ein paar Englisch-Kenntnisse sollte man haben).
Ich zum Beispiel hatte während der Bauphase drei Probleme, über die ich mir jeweils Stunden den Kopf zerbrach. Jedes mal habe ich verzweifelt ohne jenen Ansatz für eine Lösung in der configuration.h rumgewühlt, und jedes mal das Problem dort beheben können.
gruß,
Marius
1-mal bearbeitet. Zuletzt am 13.05.12 04:22.
|
Re: Ich brauche Hilfe 13. May 2012 12:17 |
Registrierungsdatum: 11 Jahre zuvor Beiträge: 489 |
|
Re: Ich brauche Hilfe 13. May 2012 12:51 |
Registrierungsdatum: 11 Jahre zuvor Beiträge: 489 |
hab jetzt die Einstellungen
#ifndef __CONFIGURATION_H
#define __CONFIGURATION_H
// This configurtion file contains the basic settings.
// Advanced settings can be found in Configuration_adv.h
// BASIC SETTINGS: select your board type, temperature sensor type, axis scaling, and endstop configuration
//User specified version info of THIS file to display in [Pronterface, etc] terminal window during startup.
//Implementation of an idea by Prof Braino to inform user that any changes made
//to THIS file by the user have been successfully uploaded into firmware.
#define STRING_VERSION_CONFIG_H "2012-05-02" //Personal revision number for changes to THIS file.
#define STRING_CONFIG_H_AUTHOR "erik" //Who made the changes.
// This determines the communication speed of the printer
#define BAUDRATE 250000
//#define BAUDRATE 115200
//// The following define selects which electronics board you have. Please choose the one that matches your setup
// Gen7 custom (Alfons3 Version) = 10 "https://github.com/Alfons3/Generation_7_Electronics"
// Gen7 v1.1, v1.2 = 11
// Gen7 v1.3 = 12
// Gen7 v1.4 = 13
// MEGA/RAMPS up to 1.2 = 3
// RAMPS 1.3 = 33 (Power outputs: Extruder, Bed, Fan)
// RAMPS 1.3 = 34 (Power outputs: Extruder0, Extruder1, Bed)
// Gen6 = 5
// Gen6 deluxe = 51
// Sanguinololu 1.2 and above = 62
// Ultimaker = 7
// Teensylu = 8
// Gen3+ =9
#ifndef MOTHERBOARD
#define MOTHERBOARD 33
#endif
//===========================================================================
//=============================Thermal Settings ============================
//===========================================================================
//// Temperature sensor settings:
// -2 is thermocouple with MAX6675 (only for sensor 0)
// -1 is thermocouple with AD595
// 0 is not used
// 1 is 100k thermistor
// 2 is 200k thermistor
// 3 is mendel-parts thermistor
// 4 is 10k thermistor !! do not use it for a hotend. It gives bad resolution at high temp. !!
// 5 is ParCan supplied 104GT-2 100K
// 6 is EPCOS 100k
// 7 is 100k Honeywell thermistor 135-104LAG-J01
#define TEMP_SENSOR_0 1
#define TEMP_SENSOR_1 0
#define TEMP_SENSOR_2 0
#define TEMP_SENSOR_BED 0
// Actual temperature must be close to target for this long before M109 returns success
#define TEMP_RESIDENCY_TIME 10 // (seconds)
#define TEMP_HYSTERESIS 3 // (degC) range of +/- temperatures considered "close" to the target one
#define TEMP_WINDOW 1 // (degC) Window around target to start the recidency timer x degC early.
// The minimal temperature defines the temperature below which the heater will not be enabled It is used
// to check that the wiring to the thermistor is not broken.
// Otherwise this would lead to the heater being powered on all the time.
#define HEATER_0_MINTEMP 5
#define HEATER_1_MINTEMP 5
#define HEATER_2_MINTEMP 5
#define BED_MINTEMP 5
// When temperature exceeds max temp, your heater will be switched off.
// This feature exists to protect your hotend from overheating accidentally, but *NOT* from thermistor short/failure!
// You should use MINTEMP for thermistor short/failure protection.
#define HEATER_0_MAXTEMP 275
#define HEATER_1_MAXTEMP 275
#define HEATER_2_MAXTEMP 275
#define BED_MAXTEMP 150
// PID settings:
// Comment the following line to disable PID and enable bang-bang.
#define PIDTEMP
#define PID_MAX 255 // limits current to nozzle; 255=full current
#ifdef PIDTEMP
//#define PID_DEBUG // Sends debug data to the serial port.
//#define PID_OPENLOOP 1 // Puts PID in open loop. M104 sets the output power in %
#define PID_INTEGRAL_DRIVE_MAX 255 //limit for the integral term
#define K1 0.95 //smoothing factor withing the PID
#define PID_dT ((16.0 * 8.0)/(F_CPU / 64.0 / 256.0)) //sampling period of the
// If you are using a preconfigured hotend then you can use one of the value sets by uncommenting it
// Ultimaker
#define DEFAULT_Kp 22.2
#define DEFAULT_Ki 1.08
#define DEFAULT_Kd 114
// Makergear
// #define DEFAULT_Kp 7.0
// #define DEFAULT_Ki 0.1
// #define DEFAULT_Kd 12
// Mendel Parts V9 on 12V
// #define DEFAULT_Kp 63.0
// #define DEFAULT_Ki 2.25
// #define DEFAULT_Kd 440
#endif // PIDTEMP
//this prevents dangerous Extruder moves, i.e. if the temperature is under the limit
//can be software-disabled for whatever purposes by
#define PREVENT_DANGEROUS_EXTRUDE
#define EXTRUDE_MINTEMP 180
#define EXTRUDE_MAXLENGTH (X_MAX_LENGTH+Y_MAX_LENGTH) //prevent extrusion of very large distances.
//===========================================================================
//=============================Mechanical Settings===========================
//===========================================================================
// Endstop Settings
#define ENDSTOPPULLUPS // Comment this out (using // at the start of the line) to disable the endstop pullup resistors
// The pullups are needed if you directly connect a mechanical endswitch between the signal and ground pins.
const bool X_ENDSTOPS_INVERTING = true; // set to true to invert the logic of the endstops.
const bool Y_ENDSTOPS_INVERTING = true; // set to true to invert the logic of the endstops.
const bool Z_ENDSTOPS_INVERTING = true; // set to true to invert the logic of the endstops.
//#define DISABLE_MAX_ENDSTOPS
// For Inverting Stepper Enable Pins (Active Low) use 0, Non Inverting (Active High) use 1
#define X_ENABLE_ON 0
#define Y_ENABLE_ON 0
#define Z_ENABLE_ON 0
#define E_ENABLE_ON 0 // For all extruders
// Disables axis when it's not being used.
#define DISABLE_X false
#define DISABLE_Y false
#define DISABLE_Z true
#define DISABLE_E false // For all extruders
#define INVERT_X_DIR false // for Mendel set to false, for Orca set to true
#define INVERT_Y_DIR false // for Mendel set to true, for Orca set to false
#define INVERT_Z_DIR true // for Mendel set to false, for Orca set to true
#define INVERT_E0_DIR false // for direct drive extruder v9 set to true, for geared extruder set to false
#define INVERT_E1_DIR false // for direct drive extruder v9 set to true, for geared extruder set to false
#define INVERT_E2_DIR false // for direct drive extruder v9 set to true, for geared extruder set to false
// ENDSTOP SETTINGS:
// Sets direction of endstops when homing; 1=MAX, -1=MIN
#define X_HOME_DIR -1
#define Y_HOME_DIR -1
#define Z_HOME_DIR -1
#define min_software_endstops true //If true, axis won't move to coordinates less than HOME_POS.
#define max_software_endstops true //If true, axis won't move to coordinates greater than the defined lengths below.
#define X_MAX_LENGTH 205
#define Y_MAX_LENGTH 205
#define Z_MAX_LENGTH 200
// The position of the homing switches. Use MAX_LENGTH * -0.5 if the center should be 0, 0, 0
#define X_HOME_POS 0
#define Y_HOME_POS 0
#define Z_HOME_POS 0
//// MOVEMENT SETTINGS
#define NUM_AXIS 4 // The axis order in all axis related arrays is X, Y, Z, E
#define HOMING_FEEDRATE {50*60, 50*60, 4*60, 0} // set the homing speeds (mm/min)
// default settings
#define DEFAULT_AXIS_STEPS_PER_UNIT {78.7402,78.7402,200*8/3,760*1.1} // default steps per unit for ultimaker
#define DEFAULT_MAX_FEEDRATE {500, 500, 5, 45} // (mm/sec)
#define DEFAULT_MAX_ACCELERATION {9000,9000,100,10000} // X, Y, Z, E maximum start speed for accelerated moves. E default values are good for skeinforge 40+, for older versions raise them a lot.
#define DEFAULT_ACCELERATION 3000 // X, Y, Z and E max acceleration in mm/s^2 for printing moves
#define DEFAULT_RETRACT_ACCELERATION 3000 // X, Y, Z and E max acceleration in mm/s^2 for r retracts
//
#define DEFAULT_XYJERK 20.0 // (mm/sec)
#define DEFAULT_ZJERK 0.4 // (mm/sec)
#define DEFAULT_EJERK 5.0 // (mm/sec)
//===========================================================================
//=============================Additional Features===========================
//===========================================================================
// EEPROM
// the microcontroller can store settings in the EEPROM, e.g. max velocity...
// M500 - stores paramters in EEPROM
// M501 - reads parameters from EEPROM (if you need reset them after you changed them temporarily).
// M502 - reverts to the default "factory settings". You still need to store them in EEPROM afterwards if you want to.
//define this to enable eeprom support
//#define EEPROM_SETTINGS
//to disable EEPROM Serial responses and decrease program space by ~1700 byte: comment this out:
// please keep turned on if you can.
//#define EEPROM_CHITCHAT
//LCD and SD support
//#define ULTRA_LCD //general lcd support, also 16x2
//#define SDSUPPORT // Enable SD Card Support in Hardware Console
//#define ULTIMAKERCONTROLLER //as available from the ultimaker online store.
//#define ULTIPANEL //the ultipanel as on thingiverse
#ifdef ULTIMAKERCONTROLLER //automatic expansion
#define ULTIPANEL
#define NEWPANEL
#endif
#ifdef ULTIPANEL
// #define NEWPANEL //enable this if you have a click-encoder panel
#define SDSUPPORT
#define ULTRA_LCD
#define LCD_WIDTH 20
#define LCD_HEIGHT 4
// Preheat Constants
#define PLA_PREHEAT_HOTEND_TEMP 180
#define PLA_PREHEAT_HPB_TEMP 70
#define PLA_PREHEAT_FAN_SPEED 255 // Insert Value between 0 and 255
#define ABS_PREHEAT_HOTEND_TEMP 240
#define ABS_PREHEAT_HPB_TEMP 100
#define ABS_PREHEAT_FAN_SPEED 255 // Insert Value between 0 and 255
#else //no panel but just lcd
#ifdef ULTRA_LCD
#define LCD_WIDTH 16
#define LCD_HEIGHT 2
#endif
#endif
// Increase the FAN pwm frequency. Removes the PWM noise but increases heating in the FET/Arduino
#define FAST_PWM_FAN
// M240 Triggers a camera by emulating a Canon RC-1 Remote
// Data from: [www.doc-diy.net]
// #define PHOTOGRAPH_PIN 23
#include "Configuration_adv.h"
#include "thermistortables.h"
#endif //__CONFIGURATION_H
#ifndef __CONFIGURATION_H
#define __CONFIGURATION_H
// This configurtion file contains the basic settings.
// Advanced settings can be found in Configuration_adv.h
// BASIC SETTINGS: select your board type, temperature sensor type, axis scaling, and endstop configuration
//User specified version info of THIS file to display in [Pronterface, etc] terminal window during startup.
//Implementation of an idea by Prof Braino to inform user that any changes made
//to THIS file by the user have been successfully uploaded into firmware.
#define STRING_VERSION_CONFIG_H "2012-05-02" //Personal revision number for changes to THIS file.
#define STRING_CONFIG_H_AUTHOR "erik" //Who made the changes.
// This determines the communication speed of the printer
#define BAUDRATE 250000
//#define BAUDRATE 115200
//// The following define selects which electronics board you have. Please choose the one that matches your setup
// Gen7 custom (Alfons3 Version) = 10 "https://github.com/Alfons3/Generation_7_Electronics"
// Gen7 v1.1, v1.2 = 11
// Gen7 v1.3 = 12
// Gen7 v1.4 = 13
// MEGA/RAMPS up to 1.2 = 3
// RAMPS 1.3 = 33 (Power outputs: Extruder, Bed, Fan)
// RAMPS 1.3 = 34 (Power outputs: Extruder0, Extruder1, Bed)
// Gen6 = 5
// Gen6 deluxe = 51
// Sanguinololu 1.2 and above = 62
// Ultimaker = 7
// Teensylu = 8
// Gen3+ =9
#ifndef MOTHERBOARD
#define MOTHERBOARD 33
#endif
//===========================================================================
//=============================Thermal Settings ============================
//===========================================================================
//// Temperature sensor settings:
// -2 is thermocouple with MAX6675 (only for sensor 0)
// -1 is thermocouple with AD595
// 0 is not used
// 1 is 100k thermistor
// 2 is 200k thermistor
// 3 is mendel-parts thermistor
// 4 is 10k thermistor !! do not use it for a hotend. It gives bad resolution at high temp. !!
// 5 is ParCan supplied 104GT-2 100K
// 6 is EPCOS 100k
// 7 is 100k Honeywell thermistor 135-104LAG-J01
#define TEMP_SENSOR_0 1
#define TEMP_SENSOR_1 0
#define TEMP_SENSOR_2 0
#define TEMP_SENSOR_BED 0
// Actual temperature must be close to target for this long before M109 returns success
#define TEMP_RESIDENCY_TIME 10 // (seconds)
#define TEMP_HYSTERESIS 3 // (degC) range of +/- temperatures considered "close" to the target one
#define TEMP_WINDOW 1 // (degC) Window around target to start the recidency timer x degC early.
// The minimal temperature defines the temperature below which the heater will not be enabled It is used
// to check that the wiring to the thermistor is not broken.
// Otherwise this would lead to the heater being powered on all the time.
#define HEATER_0_MINTEMP 5
#define HEATER_1_MINTEMP 5
#define HEATER_2_MINTEMP 5
#define BED_MINTEMP 5
// When temperature exceeds max temp, your heater will be switched off.
// This feature exists to protect your hotend from overheating accidentally, but *NOT* from thermistor short/failure!
// You should use MINTEMP for thermistor short/failure protection.
#define HEATER_0_MAXTEMP 275
#define HEATER_1_MAXTEMP 275
#define HEATER_2_MAXTEMP 275
#define BED_MAXTEMP 150
// PID settings:
// Comment the following line to disable PID and enable bang-bang.
#define PIDTEMP
#define PID_MAX 255 // limits current to nozzle; 255=full current
#ifdef PIDTEMP
//#define PID_DEBUG // Sends debug data to the serial port.
//#define PID_OPENLOOP 1 // Puts PID in open loop. M104 sets the output power in %
#define PID_INTEGRAL_DRIVE_MAX 255 //limit for the integral term
#define K1 0.95 //smoothing factor withing the PID
#define PID_dT ((16.0 * 8.0)/(F_CPU / 64.0 / 256.0)) //sampling period of the
// If you are using a preconfigured hotend then you can use one of the value sets by uncommenting it
// Ultimaker
#define DEFAULT_Kp 22.2
#define DEFAULT_Ki 1.08
#define DEFAULT_Kd 114
// Makergear
// #define DEFAULT_Kp 7.0
// #define DEFAULT_Ki 0.1
// #define DEFAULT_Kd 12
// Mendel Parts V9 on 12V
// #define DEFAULT_Kp 63.0
// #define DEFAULT_Ki 2.25
// #define DEFAULT_Kd 440
#endif // PIDTEMP
//this prevents dangerous Extruder moves, i.e. if the temperature is under the limit
//can be software-disabled for whatever purposes by
#define PREVENT_DANGEROUS_EXTRUDE
#define EXTRUDE_MINTEMP 180
#define EXTRUDE_MAXLENGTH (X_MAX_LENGTH+Y_MAX_LENGTH) //prevent extrusion of very large distances.
//===========================================================================
//=============================Mechanical Settings===========================
//===========================================================================
// Endstop Settings
#define ENDSTOPPULLUPS // Comment this out (using // at the start of the line) to disable the endstop pullup resistors
// The pullups are needed if you directly connect a mechanical endswitch between the signal and ground pins.
const bool X_ENDSTOPS_INVERTING = true; // set to true to invert the logic of the endstops.
const bool Y_ENDSTOPS_INVERTING = true; // set to true to invert the logic of the endstops.
const bool Z_ENDSTOPS_INVERTING = true; // set to true to invert the logic of the endstops.
//#define DISABLE_MAX_ENDSTOPS
// For Inverting Stepper Enable Pins (Active Low) use 0, Non Inverting (Active High) use 1
#define X_ENABLE_ON 0
#define Y_ENABLE_ON 0
#define Z_ENABLE_ON 0
#define E_ENABLE_ON 0 // For all extruders
// Disables axis when it's not being used.
#define DISABLE_X false
#define DISABLE_Y false
#define DISABLE_Z true
#define DISABLE_E false // For all extruders
#define INVERT_X_DIR false // for Mendel set to false, for Orca set to true
#define INVERT_Y_DIR false // for Mendel set to true, for Orca set to false
#define INVERT_Z_DIR true // for Mendel set to false, for Orca set to true
#define INVERT_E0_DIR false // for direct drive extruder v9 set to true, for geared extruder set to false
#define INVERT_E1_DIR false // for direct drive extruder v9 set to true, for geared extruder set to false
#define INVERT_E2_DIR false // for direct drive extruder v9 set to true, for geared extruder set to false
// ENDSTOP SETTINGS:
// Sets direction of endstops when homing; 1=MAX, -1=MIN
#define X_HOME_DIR -1
#define Y_HOME_DIR -1
#define Z_HOME_DIR -1
#define min_software_endstops true //If true, axis won't move to coordinates less than HOME_POS.
#define max_software_endstops true //If true, axis won't move to coordinates greater than the defined lengths below.
#define X_MAX_LENGTH 205
#define Y_MAX_LENGTH 205
#define Z_MAX_LENGTH 200
// The position of the homing switches. Use MAX_LENGTH * -0.5 if the center should be 0, 0, 0
#define X_HOME_POS 0
#define Y_HOME_POS 0
#define Z_HOME_POS 0
//// MOVEMENT SETTINGS
#define NUM_AXIS 4 // The axis order in all axis related arrays is X, Y, Z, E
#define HOMING_FEEDRATE {50*60, 50*60, 4*60, 0} // set the homing speeds (mm/min)
// default settings
#define DEFAULT_AXIS_STEPS_PER_UNIT {78.7402,78.7402,200*8/3,760*1.1} // default steps per unit for ultimaker
#define DEFAULT_MAX_FEEDRATE {500, 500, 5, 45} // (mm/sec)
#define DEFAULT_MAX_ACCELERATION {9000,9000,100,10000} // X, Y, Z, E maximum start speed for accelerated moves. E default values are good for skeinforge 40+, for older versions raise them a lot.
#define DEFAULT_ACCELERATION 3000 // X, Y, Z and E max acceleration in mm/s^2 for printing moves
#define DEFAULT_RETRACT_ACCELERATION 3000 // X, Y, Z and E max acceleration in mm/s^2 for r retracts
//
#define DEFAULT_XYJERK 20.0 // (mm/sec)
#define DEFAULT_ZJERK 0.4 // (mm/sec)
#define DEFAULT_EJERK 5.0 // (mm/sec)
//===========================================================================
//=============================Additional Features===========================
//===========================================================================
// EEPROM
// the microcontroller can store settings in the EEPROM, e.g. max velocity...
// M500 - stores paramters in EEPROM
// M501 - reads parameters from EEPROM (if you need reset them after you changed them temporarily).
// M502 - reverts to the default "factory settings". You still need to store them in EEPROM afterwards if you want to.
//define this to enable eeprom support
//#define EEPROM_SETTINGS
//to disable EEPROM Serial responses and decrease program space by ~1700 byte: comment this out:
// please keep turned on if you can.
//#define EEPROM_CHITCHAT
//LCD and SD support
//#define ULTRA_LCD //general lcd support, also 16x2
//#define SDSUPPORT // Enable SD Card Support in Hardware Console
//#define ULTIMAKERCONTROLLER //as available from the ultimaker online store.
//#define ULTIPANEL //the ultipanel as on thingiverse
#ifdef ULTIMAKERCONTROLLER //automatic expansion
#define ULTIPANEL
#define NEWPANEL
#endif
#ifdef ULTIPANEL
// #define NEWPANEL //enable this if you have a click-encoder panel
#define SDSUPPORT
#define ULTRA_LCD
#define LCD_WIDTH 20
#define LCD_HEIGHT 4
// Preheat Constants
#define PLA_PREHEAT_HOTEND_TEMP 180
#define PLA_PREHEAT_HPB_TEMP 70
#define PLA_PREHEAT_FAN_SPEED 255 // Insert Value between 0 and 255
#define ABS_PREHEAT_HOTEND_TEMP 240
#define ABS_PREHEAT_HPB_TEMP 100
#define ABS_PREHEAT_FAN_SPEED 255 // Insert Value between 0 and 255
#else //no panel but just lcd
#ifdef ULTRA_LCD
#define LCD_WIDTH 16
#define LCD_HEIGHT 2
#endif
#endif
// Increase the FAN pwm frequency. Removes the PWM noise but increases heating in the FET/Arduino
#define FAST_PWM_FAN
// M240 Triggers a camera by emulating a Canon RC-1 Remote
// Data from: [www.doc-diy.net]
// #define PHOTOGRAPH_PIN 23
#include "Configuration_adv.h"
#include "thermistortables.h"
#endif //__CONFIGURATION_H
|
Re: Ich brauche Hilfe 13. May 2012 13:00 |
Registrierungsdatum: 11 Jahre zuvor Beiträge: 489 |
Der Drucker macht jetzt folgendes mit den Einstellungen:
X+ (nach recht) so weit ich will X- geht nicht
Y+(nach hinten) so weit ich will Y- nur bis zu dem Punkt wo der Drucker angeschaltet wurde.
Z+(hoch) so weit ich will Z- geht nicht
Habe die Optischen Anschläge so wie folgt verbaut:
Z: ist klar
X:links
Y:vorne neben dem Motor
Ich habe die Optischen Anschläge nicht so verdrahtet wie auf dem Bild zu sehen ist, da sie dann nicht schalten.
Meine Anschläge sind so verdrahtet wie sie auch vom Board kommen + - Sig
so steht das auch am Anschlag.
und ´nur so leuchten sie, und gehen aus wenn ich etwas dazwischen halte.
Was mache ich nur falsch?
X+ (nach recht) so weit ich will X- geht nicht
Y+(nach hinten) so weit ich will Y- nur bis zu dem Punkt wo der Drucker angeschaltet wurde.
Z+(hoch) so weit ich will Z- geht nicht
Habe die Optischen Anschläge so wie folgt verbaut:
Z: ist klar
X:links
Y:vorne neben dem Motor
Ich habe die Optischen Anschläge nicht so verdrahtet wie auf dem Bild zu sehen ist, da sie dann nicht schalten.
Meine Anschläge sind so verdrahtet wie sie auch vom Board kommen + - Sig
so steht das auch am Anschlag.
und ´nur so leuchten sie, und gehen aus wenn ich etwas dazwischen halte.
Was mache ich nur falsch?
|
Re: Ich brauche Hilfe 13. May 2012 13:35 |
Registrierungsdatum: 14 Jahre zuvor Beiträge: 3.742 |
Als erstes wird ich versuchen folgendes:
Zu andern wie folgt:
Bob Morrison
Wörth am Rhein, Germany
"Luke, use the source!"
BLOG - PHOTOS - Thingiverse
const bool X_ENDSTOPS_INVERTING = true; // set to true to invert the logic of the endstops. const bool Y_ENDSTOPS_INVERTING = true; // set to true to invert the logic of the endstops. const bool Z_ENDSTOPS_INVERTING = true; // set to true to invert the logic of the endstops.
Zu andern wie folgt:
const bool X_ENDSTOPS_INVERTING = false; // set to true to invert the logic of the endstops. const bool Y_ENDSTOPS_INVERTING = false; // set to true to invert the logic of the endstops. const bool Z_ENDSTOPS_INVERTING = false; // set to true to invert the logic of the endstops.
Bob Morrison
Wörth am Rhein, Germany
"Luke, use the source!"
BLOG - PHOTOS - Thingiverse
|
Re: Ich brauche Hilfe 13. May 2012 14:36 |
Registrierungsdatum: 12 Jahre zuvor Beiträge: 198 |
Der X-Endstop sollte eigentlich rechts angebaut sein, damit der Null-Punkt in der rechten hinteren Ecke des Druckbettes liegt. Sonst werden Deine Drucke nachher spiegelverkehrt. Dazu muss dann auch
#define INVERT_X_DIR true
gesetzt werden.
> #define min_software_endstops true //If true, axis won't move to coordinates less than HOME_POS.
Nach dem Einschalten sind die internen Zähler mit 0 initialisiert. Die obige Zeile verbietet ihm auf Werte kleiner 0 zu fahren. In Minus-Bereiche fährt er nur über den Home-Befehl (G90).
Anscheinend erkennt er aber Deinen X-Endstop schon als gesetzt. Prüfe den am Ausgang mal.
Grüße von
Mirko
#define INVERT_X_DIR true
gesetzt werden.
> #define min_software_endstops true //If true, axis won't move to coordinates less than HOME_POS.
Nach dem Einschalten sind die internen Zähler mit 0 initialisiert. Die obige Zeile verbietet ihm auf Werte kleiner 0 zu fahren. In Minus-Bereiche fährt er nur über den Home-Befehl (G90).
Anscheinend erkennt er aber Deinen X-Endstop schon als gesetzt. Prüfe den am Ausgang mal.
Grüße von
Mirko
|
Re: Ich brauche Hilfe 13. May 2012 15:34 |
Registrierungsdatum: 11 Jahre zuvor Beiträge: 489 |
So hab ihn jetzt so weit, das alle Achsen auf Home fahren und auch anhalten! Juhu
Wenn ich dann G0 X100 oder Y100 eingebe fährt er auch in die richtige Richtung.
Wo ich jetzt etwas unsicher bin ist die Nummer mit dem Nullpunkt.
Wo genau soll der jetzt sein?
Bei mir ist er links hinten am Druckbrett ( der Motor der Y achse guckt zu mir)
So hab ich das auch auf Bildern gesehen .
Wenn ich dann G0 X100 oder Y100 eingebe fährt er auch in die richtige Richtung.
Wo ich jetzt etwas unsicher bin ist die Nummer mit dem Nullpunkt.
Wo genau soll der jetzt sein?
Bei mir ist er links hinten am Druckbrett ( der Motor der Y achse guckt zu mir)
So hab ich das auch auf Bildern gesehen .
|
Re: Ich brauche Hilfe 13. May 2012 17:04 |
Registrierungsdatum: 12 Jahre zuvor Beiträge: 198 |
Sieh Dir doch mal das gängige Koordinatensystem an. Da wird positiv immer nach rechts bzw oben und negativ nach links bzw unten gezeichnet (guckst Du Wikipedia).
Genau so muss auch das System auf Deinem Drucktisch liegen, so daß Du die Koordinaten in positiver Richtung anfahren kannst (im Wikipedia-Bild 1. Quadrant). Vom Nullpunkt also nach rechts und oben. Wenn er bei Dir hinten links ist, fährt eine der Achsen also eigentlich in die negative Richtung. Dadurch würden dann alle Teile spiegelverkehrt.
Gute Nacht sagt
Mirko
2-mal bearbeitet. Zuletzt am 13.05.12 17:06.
Genau so muss auch das System auf Deinem Drucktisch liegen, so daß Du die Koordinaten in positiver Richtung anfahren kannst (im Wikipedia-Bild 1. Quadrant). Vom Nullpunkt also nach rechts und oben. Wenn er bei Dir hinten links ist, fährt eine der Achsen also eigentlich in die negative Richtung. Dadurch würden dann alle Teile spiegelverkehrt.
Gute Nacht sagt
Mirko
2-mal bearbeitet. Zuletzt am 13.05.12 17:06.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
In diesem Forum dürfen leider nur registrierte Teilnehmer schreiben.