ramps1.4 nur Probleme :/
geschrieben von skillertheking
|
ramps1.4 nur Probleme :/ 25. August 2014 16:46 |
Registrierungsdatum: 9 Jahre zuvor Beiträge: 38 |
Hey Leute
Bin noch neu auf diesem Gebiet
Hab aber schon diverse Erfahrungen mit Elektronik und programieren usw. (Arduino UNO und raspberry pi )
SainSmart Ramps 1.4 + 5x A4988 + Mega2560 R3 + Endstop + Cooler Fan + MK2B +Nema 17 Stepper Motor
Mit Marlin Firmware
Alle drei Jumper sind unter dem stepdriver gesetzt
An dem poti auf dem stepdriver hab ich auch schon Rum gedreht
Ich habe leider das Problem das ich den Schritt Motor (nema 17) nicht zum laufen bekomme entweder zuckt er nur herum oder es geht gar nichts
Hab im Moment nur ein stepdriver auf X und verschiedene Pin verdratungen ausprobiert
Habe am Stepper folgende Pinbelegung die durch das Stecker Kabel vorgeben sind: Rot/nichts/Schwarz/Blau/nichts/Grün
Hab im internet unteranderem die Belegung gefunden
Rot 2B
Grün 2A
Blau 1A
Schwarz 1B
Und über das Display und poti -- prepare/move axis/move 1mm/move x/ nur ein leichtes zucken ...
Hab auch schon anderer axen Steckplatz probiert und anderen Stepper und keine Besserung in Sicht :/
Atx-Netzteil mit 20A auf 12volt
Ich hoffe ihrsg könnt mir helfen sonst Tick ich hier noch dezent aus
Bin noch neu auf diesem Gebiet
Hab aber schon diverse Erfahrungen mit Elektronik und programieren usw. (Arduino UNO und raspberry pi )
SainSmart Ramps 1.4 + 5x A4988 + Mega2560 R3 + Endstop + Cooler Fan + MK2B +Nema 17 Stepper Motor
Mit Marlin Firmware
Alle drei Jumper sind unter dem stepdriver gesetzt
An dem poti auf dem stepdriver hab ich auch schon Rum gedreht
Ich habe leider das Problem das ich den Schritt Motor (nema 17) nicht zum laufen bekomme entweder zuckt er nur herum oder es geht gar nichts
Hab im Moment nur ein stepdriver auf X und verschiedene Pin verdratungen ausprobiert
Habe am Stepper folgende Pinbelegung die durch das Stecker Kabel vorgeben sind: Rot/nichts/Schwarz/Blau/nichts/Grün
Hab im internet unteranderem die Belegung gefunden
Rot 2B
Grün 2A
Blau 1A
Schwarz 1B
Und über das Display und poti -- prepare/move axis/move 1mm/move x/ nur ein leichtes zucken ...
Hab auch schon anderer axen Steckplatz probiert und anderen Stepper und keine Besserung in Sicht :/
Atx-Netzteil mit 20A auf 12volt
Ich hoffe ihrsg könnt mir helfen sonst Tick ich hier noch dezent aus
|
Re: ramps1.4 nur Probleme :/ 25. August 2014 23:45 |
Registrierungsdatum: 11 Jahre zuvor Beiträge: 254 |
Guten Morgen
Bei allen meinen Motoren sind die paarungen rot+blau und grün+schwarz. Wenn Du ohne strom nur diese kabel zusammen klemmst sollte der Widerstand am Motor merklich steigen, wenn Du an der Achse drehst.
Gruss
Niggi
Früher waren es Modell-Helis aber bei meinen Flugkünsten waren die Ersatzteile zu teuer...
Vielleicht werden mit meinem Mendel90 Ersatzteile billiger und besser ;-)
Bei allen meinen Motoren sind die paarungen rot+blau und grün+schwarz. Wenn Du ohne strom nur diese kabel zusammen klemmst sollte der Widerstand am Motor merklich steigen, wenn Du an der Achse drehst.
Gruss
Niggi
Früher waren es Modell-Helis aber bei meinen Flugkünsten waren die Ersatzteile zu teuer...
Vielleicht werden mit meinem Mendel90 Ersatzteile billiger und besser ;-)
|
Re: ramps1.4 nur Probleme :/ 26. August 2014 06:35 |
Registrierungsdatum: 9 Jahre zuvor Beiträge: 38 |
Hab es mal getestet mit den paaren zusammen klemmen und es ist wie du sagtest das der stepper dann schwer gängig ist
Habe dann
Rot an 1A
Blau an 2A
Grün an 1B
Schwarz an 2B
Und dann ist das rausgekommen
ramps stepper problem youtube
Habe dann
Rot an 1A
Blau an 2A
Grün an 1B
Schwarz an 2B
Und dann ist das rausgekommen
ramps stepper problem youtube
|
Re: ramps1.4 nur Probleme :/ 26. August 2014 07:25 |
Registrierungsdatum: 11 Jahre zuvor Beiträge: 254 |
Hi
Was ich ganz am Anfang des Filmes sehe ist: rot und grün sind nebeneinander und demzufolge schwarz und blau. Das klappt so vermutlich nicht.
Und jetzt mal zum Anfang zurück:
Verbinde NUR die Drähte des Motors rot und blau miteinander. NIRGENS anschliessen! Und den Wiederstand der Motorachse gegenüber vorher vergleichen. Sollte spührbar schwerer gehen den Motor zu drehen.
Dann nehme die Reihenfolge: schwarz grün blau rot. Das sollte gehen. Wenn der Motor verkehrt dreht, den Stecker drehen.
Gruss
Niggi
Früher waren es Modell-Helis aber bei meinen Flugkünsten waren die Ersatzteile zu teuer...
Vielleicht werden mit meinem Mendel90 Ersatzteile billiger und besser ;-)
Was ich ganz am Anfang des Filmes sehe ist: rot und grün sind nebeneinander und demzufolge schwarz und blau. Das klappt so vermutlich nicht.
Und jetzt mal zum Anfang zurück:
Verbinde NUR die Drähte des Motors rot und blau miteinander. NIRGENS anschliessen! Und den Wiederstand der Motorachse gegenüber vorher vergleichen. Sollte spührbar schwerer gehen den Motor zu drehen.
Dann nehme die Reihenfolge: schwarz grün blau rot. Das sollte gehen. Wenn der Motor verkehrt dreht, den Stecker drehen.
Gruss
Niggi
Früher waren es Modell-Helis aber bei meinen Flugkünsten waren die Ersatzteile zu teuer...
Vielleicht werden mit meinem Mendel90 Ersatzteile billiger und besser ;-)
|
Re: ramps1.4 nur Probleme :/ 26. August 2014 11:13 |
Registrierungsdatum: 9 Jahre zuvor Beiträge: 38 |
Also habe die 2 Drähte miteinander verbunden und die anderen zwei so hängen lassen und ich habe keinen größeren wiederstand festgestellt ....
Die Reihenfolge hab ich ausprobiert schwarz grün blau rot und umgekehrt und immernoch nur ein zucken....
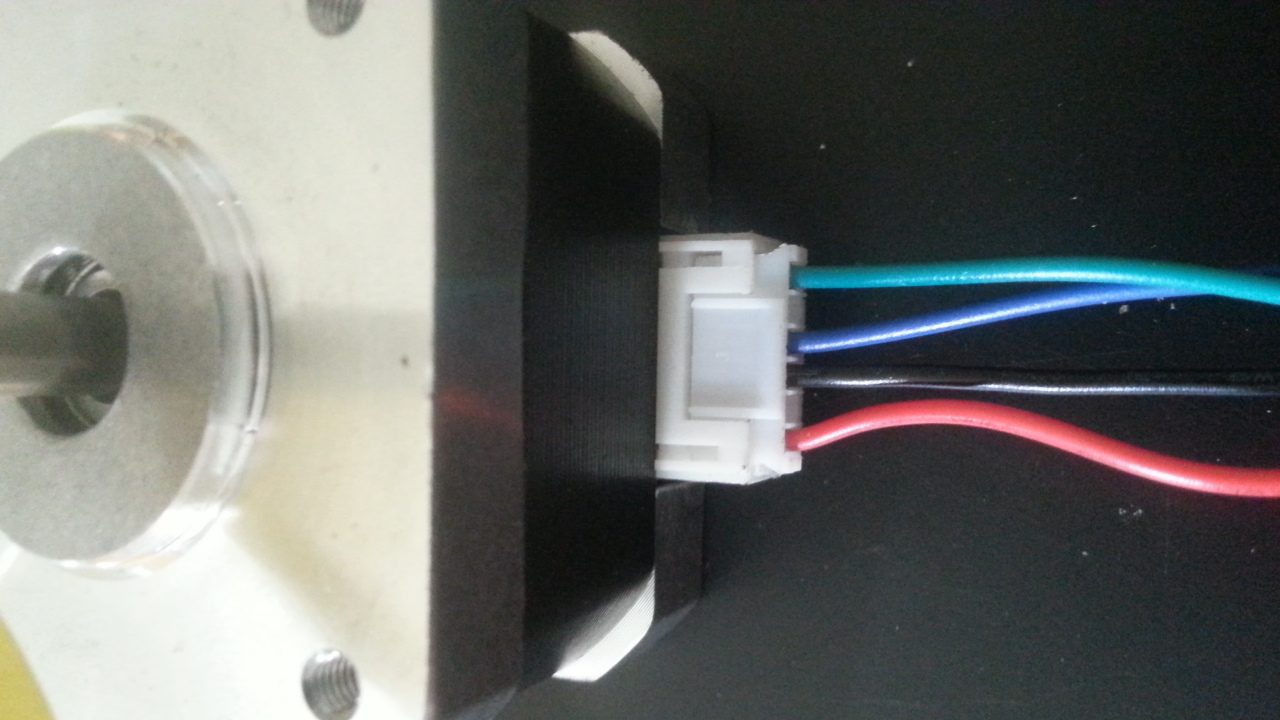
Ist vill die Verkabelung direkt am Motor falsch ?
Bild habe ich angehängt
Oder vill was an der Marlin Firmware hab die runtergeladen und so wie sie War aufgespielt
1-mal bearbeitet. Zuletzt am 26.08.14 11:15.
Die Reihenfolge hab ich ausprobiert schwarz grün blau rot und umgekehrt und immernoch nur ein zucken....
Ist vill die Verkabelung direkt am Motor falsch ?
Bild habe ich angehängt
Oder vill was an der Marlin Firmware hab die runtergeladen und so wie sie War aufgespielt
1-mal bearbeitet. Zuletzt am 26.08.14 11:15.
|
Re: ramps1.4 nur Probleme :/ 26. August 2014 11:44 |
Registrierungsdatum: 10 Jahre zuvor Beiträge: 1.689 |
hast Du ein Kabel (zB ROT) auch mit den anderen Kabeln verbunden und die Achse zu drehen versucht?
Hast Du Endstops am Board hängen? Wenn Ja, erst Homing im Menü, ggfls die Schalter per Hand betätigen, dann erst die Achsen bewegen. Mein Ramps/Marlin zuckelt auch nur, wenn nicht vorher auf Homing gegangen bin.
Grüße
seefew
Hast Du Endstops am Board hängen? Wenn Ja, erst Homing im Menü, ggfls die Schalter per Hand betätigen, dann erst die Achsen bewegen. Mein Ramps/Marlin zuckelt auch nur, wenn nicht vorher auf Homing gegangen bin.
Grüße
seefew
|
Re: ramps1.4 nur Probleme :/ 26. August 2014 12:30 |
Registrierungsdatum: 9 Jahre zuvor Beiträge: 38 |
|
Re: ramps1.4 nur Probleme :/ 26. August 2014 17:08 |
Registrierungsdatum: 9 Jahre zuvor Beiträge: 38 |
|
Re: ramps1.4 nur Probleme :/ 28. August 2014 15:47 |
Registrierungsdatum: 9 Jahre zuvor Beiträge: 38 |
hey leute hab en neuer spannungswandler drauf gelötet und siehe da er funktioniert wieder 
hab aber immer noch das gleiche problem mit dem stepper das die nur zucken
hab die verkabelung getest von:
aber auch nur ein zucken!!!
dann habe ich die pinbelegung nach diesem bild reprap forum ausprobiert, und es zuckt weiterhin !!
habe dann 2 endstops angeschlossen und es zuckt immernoch
wie sieht es da mit der firmware aus muss ich da noch was umschreiben das sich der stepper endlich mal um kreis dreht ??
hab aber immer noch das gleiche problem mit dem stepper das die nur zucken
hab die verkabelung getest von:
Quote
hutzlibatz
Dann nehme die Reihenfolge: schwarz grün blau rot. Das sollte gehen. Wenn der Motor verkehrt dreht, den Stecker drehen.
Niggi
aber auch nur ein zucken!!!
dann habe ich die pinbelegung nach diesem bild reprap forum ausprobiert, und es zuckt weiterhin !!
habe dann 2 endstops angeschlossen und es zuckt immernoch
wie sieht es da mit der firmware aus muss ich da noch was umschreiben das sich der stepper endlich mal um kreis dreht ??
|
Re: ramps1.4 nur Probleme :/ 28. August 2014 23:46 |
Registrierungsdatum: 11 Jahre zuvor Beiträge: 254 |
Aber hast Du die Paarungen der Kabel herausgefunden, welche 2 zusammen gehören?
Eine kleine andere Frage:
Gibst Du dem Motor auch den Befehl zu laufen? Das ist nicht wie ein dummes Motörchen, das nur mit Strom dreht. Das ist ein noch dümmeres Motörchen dem Du auch sagen musst dass es sich drehen soll.
Gruss
Niggi
Früher waren es Modell-Helis aber bei meinen Flugkünsten waren die Ersatzteile zu teuer...
Vielleicht werden mit meinem Mendel90 Ersatzteile billiger und besser ;-)
Eine kleine andere Frage:
Gibst Du dem Motor auch den Befehl zu laufen? Das ist nicht wie ein dummes Motörchen, das nur mit Strom dreht. Das ist ein noch dümmeres Motörchen dem Du auch sagen musst dass es sich drehen soll.
Gruss
Niggi
Früher waren es Modell-Helis aber bei meinen Flugkünsten waren die Ersatzteile zu teuer...
Vielleicht werden mit meinem Mendel90 Ersatzteile billiger und besser ;-)
|
Re: ramps1.4 nur Probleme :/ 29. August 2014 02:42 |
Registrierungsdatum: 10 Jahre zuvor Beiträge: 1.689 |
|
Re: ramps1.4 nur Probleme :/ 29. August 2014 03:40 |
Registrierungsdatum: 10 Jahre zuvor Beiträge: 1.516 |
|
Re: ramps1.4 nur Probleme :/ 29. August 2014 15:35 |
Registrierungsdatum: 9 Jahre zuvor Beiträge: 38 |
Quote
hutzlibatz
Aber hast Du die Paarungen der Kabel herausgefunden, welche 2 zusammen gehören?
Eine kleine andere Frage:
Gibst Du dem Motor auch den Befehl zu laufen? Das ist nicht wie ein dummes Motörchen, das nur mit Strom dreht. Das ist ein noch dümmeres Motörchen dem Du auch sagen musst dass es sich drehen soll.
Gruss
Niggi
ja rot-blau / grün-schwarz
über den display nur ein zucken und über repetier-host zuckt er nur wenn ich X-Home (symbol) drücke über das steuer kreuz passiert rein gar nichts
Quote
seefew
nix für Ungut, aber sag jetzt bitte nicht, Du hast die Firmware nicht konfiguriert?Quote
skillertheking
wie sieht es da mit der firmware aus muss ich da noch was umschreiben das sich der stepper endlich mal um kreis dreht ??
Grüße
seefew
wie gesagt ich bin in dem bereich noch blutiger anfänger
aber naja tutorials hab ich zu dem ganzen nichts gefunden Quote
mantus
was sagt M119 zu den Endstops?
welche Endstops hast du angeschlossen?
Was passiert genau wenn du versuchst ein "home" zu machen?
21:21:33.165 : Reporting endstop status
21:21:33.181 : x_min: TRIGGERED hier ist ein endstop angeschlossen -nicht gedrückt-
21:21:33.193 : x_max: open
21:21:33.214 : y_min: TRIGGERED
21:21:33.226 : y_max: open
21:21:33.243 : z_min: TRIGGERED
21:21:33.255 : z_max: open
21:21:33.259 : ok
21:21:46.622 : Reporting endstop status
21:21:46.633 : x_min: open hier ist ein endstop angeschlossen -gedrückt-
21:21:46.646 : x_max: open
21:21:46.662 : y_min: TRIGGERED
21:21:46.674 : y_max: open
21:21:46.691 : z_min: TRIGGERED
21:21:46.708 : z_max: open
21:21:46.708 : ok
ist es normal das x/y/z-min Standard auf TRIGGERED ist? wenn auch nichts angeschlossen ist? y/z-min kein endstop angeschlossen
|
Re: ramps1.4 nur Probleme :/ 29. August 2014 16:28 |
Registrierungsdatum: 10 Jahre zuvor Beiträge: 1.689 |
|
Re: ramps1.4 nur Probleme :/ 29. August 2014 17:10 |
Registrierungsdatum: 10 Jahre zuvor Beiträge: 1.516 |
Quote
skillertheking
ist es normal das x/y/z-min Standard auf TRIGGERED ist? wenn auch nichts angeschlossen ist? y/z-min kein endstop angeschlossen
tja deine FW glaubt sie hängt bei 0,0,0 fest, daher bewegt sie sich nicht wirklich um nichts kaputt zu machen.
Du musst deine Endstops umstellen im configuration.h
const bool X_MIN_ENDSTOP_INVERTING = true; // set to true to invert the logic of the endstop. const bool Y_MIN_ENDSTOP_INVERTING = true; // set to true to invert the logic of the endstop. const bool Z_MIN_ENDSTOP_INVERTING = true; // set to true to invert the logic of the endstop. const bool X_MAX_ENDSTOP_INVERTING = true; // set to true to invert the logic of the endstop. const bool Y_MAX_ENDSTOP_INVERTING = true; // set to true to invert the logic of the endstop. const bool Z_MAX_ENDSTOP_INVERTING = true; // set to true to invert the logic of the endstop.diese codestelle musst du umstellen, wenn sie auf true sind auf false oder umgekehrt.
Vor allem als Anfänger würde ich dir von Marlin abraten, greif doch lieber zu Repetier, hier kannst du die Firmware schon mal sehr gut vorkonfigurieren
[www.repetier.com]
|
Re: ramps1.4 nur Probleme :/ 30. August 2014 20:23 |
Registrierungsdatum: 9 Jahre zuvor Beiträge: 38 |
ohh man leute ist grade voll deprimierend das es nicht funktioniert 
hab jetzt repetier drauf gemacht hab den motor so angeschlossen
Anschlussplan und der zuckt immer noch .... ich hab so langsam das gefühl das die stepperdriver kaputt sind hab alle 5 die dabei waren ausprobiert auf allen 5 ausgängen mit poti einstellung auf 12--15--18--21--24uhr und immer das gleich starke zucken
X-min/max endstops aktiviert und angeschlossen und funktionieren richtig
standart pinbelegung am motor : (links nach rechts, welle nach oben)
1=rot
2=frei
3=schwarz
4=blau
5=frei
6=grün
pinbelegung am motor (bild von oben)
1=rot--2B
2=blau--2A
3=grün--1A
4=schwarz--1B
5=frei
6=frei
kabel paar ist rot-grün bei dem es schwerer ging. bei blau-schwarz ist nichts passiert.
gruß tobi
p.s. kommt von euch jemand villeicht aus dem raum Biberach, Sigmaringen, Ulm der mir helfen könnte das es endlich mal läuft
2-mal bearbeitet. Zuletzt am 30.08.14 21:11.
hab jetzt repetier drauf gemacht hab den motor so angeschlossen
Anschlussplan und der zuckt immer noch .... ich hab so langsam das gefühl das die stepperdriver kaputt sind hab alle 5 die dabei waren ausprobiert auf allen 5 ausgängen mit poti einstellung auf 12--15--18--21--24uhr und immer das gleich starke zucken
X-min/max endstops aktiviert und angeschlossen und funktionieren richtig
standart pinbelegung am motor : (links nach rechts, welle nach oben)
1=rot
2=frei
3=schwarz
4=blau
5=frei
6=grün
pinbelegung am motor (bild von oben)
1=rot--2B
2=blau--2A
3=grün--1A
4=schwarz--1B
5=frei
6=frei
kabel paar ist rot-grün bei dem es schwerer ging. bei blau-schwarz ist nichts passiert.
gruß tobi
p.s. kommt von euch jemand villeicht aus dem raum Biberach, Sigmaringen, Ulm der mir helfen könnte das es endlich mal läuft
2-mal bearbeitet. Zuletzt am 30.08.14 21:11.
|
Re: ramps1.4 nur Probleme :/ 30. August 2014 23:04 |
Registrierungsdatum: 10 Jahre zuvor Beiträge: 1.689 |
nochmal zum Motor:
rot-grün kurzgeschlossen, blau-schwarz offen > Achse lässt sich schwer drehen
blau-schwarz kurzgeschlossen, rot-grün offen > ?
weiter oben hast Du doch ne andere Paarung angegeben: rot-blau / grün-schwarz
demnach sollte:
rot-blau kurzgeschlossen, grün-schwarz offen > Achse dreht schwer
rot-blau offen, grün-schwarz kurzgeschlossen > Achse dreht schwer
Hat der Motor (ohne Stecker) 4 oder 6 Pins?
Wird langsam verwirrend.
Grüße
1-mal bearbeitet. Zuletzt am 30.08.14 23:12.
Alle Adern offen > Achse lässt sich leicht drehenQuote
kabel paar ist rot-grün bei dem es schwerer ging. bei blau-schwarz ist nichts passiert.
rot-grün kurzgeschlossen, blau-schwarz offen > Achse lässt sich schwer drehen
blau-schwarz kurzgeschlossen, rot-grün offen > ?
weiter oben hast Du doch ne andere Paarung angegeben: rot-blau / grün-schwarz
demnach sollte:
rot-blau kurzgeschlossen, grün-schwarz offen > Achse dreht schwer
rot-blau offen, grün-schwarz kurzgeschlossen > Achse dreht schwer
Hat der Motor (ohne Stecker) 4 oder 6 Pins?
Wird langsam verwirrend.
Grüße
1-mal bearbeitet. Zuletzt am 30.08.14 23:12.
|
Re: ramps1.4 nur Probleme :/ 31. August 2014 18:59 |
Registrierungsdatum: 9 Jahre zuvor Beiträge: 38 |
Das zweite Bild ist die standart pinbelegung so wie er geliefert wurde
Das dritte Bild ist die pinbelegung nach dem Anschluss Plan nach dem Bild reprap wiki
Das dritte Bild ist die pinbelegung nach dem Anschluss Plan nach dem Bild reprap wiki
|
Re: ramps1.4 nur Probleme :/ 31. August 2014 23:46 |
Registrierungsdatum: 11 Jahre zuvor Beiträge: 254 |
Ach du grünes Ei..
Du solltest nicht am Motor die Verdrahtung drehen, sondern am Anschluss zum Board!
Gruss
Niggi
1-mal bearbeitet. Zuletzt am 31.08.14 23:46.
Früher waren es Modell-Helis aber bei meinen Flugkünsten waren die Ersatzteile zu teuer...
Vielleicht werden mit meinem Mendel90 Ersatzteile billiger und besser ;-)
Du solltest nicht am Motor die Verdrahtung drehen, sondern am Anschluss zum Board!
Gruss
Niggi
1-mal bearbeitet. Zuletzt am 31.08.14 23:46.
Früher waren es Modell-Helis aber bei meinen Flugkünsten waren die Ersatzteile zu teuer...
Vielleicht werden mit meinem Mendel90 Ersatzteile billiger und besser ;-)
|
Re: ramps1.4 nur Probleme :/ 31. August 2014 23:56 |
Registrierungsdatum: 10 Jahre zuvor Beiträge: 1.689 |
ich dachte die Aderpaare wären klar?
Häng bitte mal deine "Configuration.h" an.
Grüße
Welchen Motor Du hast, hattest Du ja weiter oben schon beschrieben.Quote
rot-blau kurzgeschlossen, grün-schwarz offen > Achse dreht schwer
rot-blau offen, grün-schwarz kurzgeschlossen > Achse dreht schwer
Häng bitte mal deine "Configuration.h" an.
Grüße
|
Re: ramps1.4 nur Probleme :/ 01. September 2014 03:56 |
Registrierungsdatum: 13 Jahre zuvor Beiträge: 7.616 |
Quote
hutzlibatz
Du solltest nicht am Motor die Verdrahtung drehen, sondern am Anschluss zum Board!
Bei einer vernünftig ausgestatteten Elektronik ist sowas gar nicht möglich. Da wird es ja bei jedem aus- und wieder einstecken zum Glücksspiel, ob der Motor noch funktioniert.
| Generation 7 Electronics | Teacup Firmware | RepRap DIY |
|
Re: ramps1.4 nur Probleme :/ 01. September 2014 04:05 |
Registrierungsdatum: 13 Jahre zuvor Beiträge: 7.616 |
Quote
seefew
In der "Configuration.h" müssen die passenden Werte (zB Steps/Unit) eingetragen werden.
Das macht für Motor laufen/nicht laufen keinen Unterschied.
| Generation 7 Electronics | Teacup Firmware | RepRap DIY |
|
Re: ramps1.4 nur Probleme :/ 01. September 2014 04:25 |
Registrierungsdatum: 13 Jahre zuvor Beiträge: 7.616 |
Zum Poti: ganz nach links, dann eine Viertel Umdrehung aufdrehen. Dazu den Motor ausbauen oder zumindest den Riemen herunter nehmen. Dann läuft er auf jeden Fall ... wenn die Verdrahtung stimmt.
Bei Motoren mit 6 Drähten ist die Verkabelung etwas schwieriger. Geht am besten mit einem Multimeter. Erst mal die beiden Spulen voneinander trennen: 3 Drähte haben keinen Kontakt zu den anderen drei Drähten. Jede dieser beiden Dreiergruppen gehört zu jeweils einer Spule.
Innerhalb einer Dreiergruppe kann man 2 Paarungen mit geringem Widerstand und eine Paarung mit dem doppelten dieses geringen Widerstands finden. Dabei jeden Draht gegen jeden anderen Draht messen. Dieses eine Paar mit dem höheren Widerstand in jeder Gruppe ist das Paar, das man braucht. Den dritten Draht ignorieren.
Dann das eine Paar auf die linken beiden Kontakte des Steckers, das andere Paar auf die rechten beiden Kontakte. Dann sollte er laufen. Läuft er falsch herum, die beiden Drähte von einem der beiden Paare vertauschen.
Endstops erst mal beiseite lassen. Selbst bei der Marlin laufen die Motoren auch mit fehlerhaften Endstops zumindest in eine Richtung. Also beide Richtungen probieren.
G-code am besten von Hand senden. Klicken ist Glücksspiel. Mit einem Serial Terminal, z.B. PuTTY, TeraTerm, GtkTerm oder CoolTerm. Oder zumindest mit Pronterface, das den G-code nur wenig verschlimmbessert.
Bei Motoren mit 6 Drähten ist die Verkabelung etwas schwieriger. Geht am besten mit einem Multimeter. Erst mal die beiden Spulen voneinander trennen: 3 Drähte haben keinen Kontakt zu den anderen drei Drähten. Jede dieser beiden Dreiergruppen gehört zu jeweils einer Spule.
Innerhalb einer Dreiergruppe kann man 2 Paarungen mit geringem Widerstand und eine Paarung mit dem doppelten dieses geringen Widerstands finden. Dabei jeden Draht gegen jeden anderen Draht messen. Dieses eine Paar mit dem höheren Widerstand in jeder Gruppe ist das Paar, das man braucht. Den dritten Draht ignorieren.
Dann das eine Paar auf die linken beiden Kontakte des Steckers, das andere Paar auf die rechten beiden Kontakte. Dann sollte er laufen. Läuft er falsch herum, die beiden Drähte von einem der beiden Paare vertauschen.
Endstops erst mal beiseite lassen. Selbst bei der Marlin laufen die Motoren auch mit fehlerhaften Endstops zumindest in eine Richtung. Also beide Richtungen probieren.
G-code am besten von Hand senden. Klicken ist Glücksspiel. Mit einem Serial Terminal, z.B. PuTTY, TeraTerm, GtkTerm oder CoolTerm. Oder zumindest mit Pronterface, das den G-code nur wenig verschlimmbessert.
| Generation 7 Electronics | Teacup Firmware | RepRap DIY |
|
Re: ramps1.4 nur Probleme :/ 01. September 2014 08:23 |
Registrierungsdatum: 11 Jahre zuvor Beiträge: 254 |
Hallo Traumflug
Nicht alle Motorkabel sind fertig konfektioniert ;-)
Und Vernünftig... keiner von uns ist vernünftig, sonst hätten wir eine Briefmarkensammlung anstatt eines 3D-Druckers
Gruss
Niggi
Früher waren es Modell-Helis aber bei meinen Flugkünsten waren die Ersatzteile zu teuer...
Vielleicht werden mit meinem Mendel90 Ersatzteile billiger und besser ;-)
Nicht alle Motorkabel sind fertig konfektioniert ;-)
Und Vernünftig... keiner von uns ist vernünftig, sonst hätten wir eine Briefmarkensammlung anstatt eines 3D-Druckers
Gruss
Niggi
Früher waren es Modell-Helis aber bei meinen Flugkünsten waren die Ersatzteile zu teuer...
Vielleicht werden mit meinem Mendel90 Ersatzteile billiger und besser ;-)
|
Re: ramps1.4 nur Probleme :/ 01. September 2014 23:15 |
Registrierungsdatum: 10 Jahre zuvor Beiträge: 1.689 |
Ach Herr Oberlehrer...Quote
Traumflug
Quote
seefew
In der "Configuration.h" müssen die passenden Werte (zB Steps/Unit) eingetragen werden.
Das macht für Motor laufen/nicht laufen keinen Unterschied.
aber wenn schon, dann bitte richtig; Motoren laufen nicht, sie drehen, und damit's komplett ist, nicht der Motor dreht sich, sondern die Welle.
Weshalb ich auf die "Conf..." hingewiesen Hab:
Versuchsweise mal übertrieben falsche Werte eingetragen, Resultat > Motoren ruckelten nur.
Grüße
|
Re: ramps1.4 nur Probleme :/ 02. September 2014 05:32 |
Registrierungsdatum: 13 Jahre zuvor Beiträge: 7.616 |
Und, habt Ihr zwei Helden mit Eurem planlosen Herumprobieren die Motoren zum laufen gebracht? Offensichtlich ja nicht.
Es ist genau dieses werkeln nach Zufallsprinzip, das die Leute mehr verwirrt als dass es hilft. So ein Controller funktioniert deterministisch (nicht zufällig), d.h. man kann Schritt für Schritt feststellen, welche Teile funktionieren und welche nicht. Und genau das sollte man auch tun.
Es ist genau dieses werkeln nach Zufallsprinzip, das die Leute mehr verwirrt als dass es hilft. So ein Controller funktioniert deterministisch (nicht zufällig), d.h. man kann Schritt für Schritt feststellen, welche Teile funktionieren und welche nicht. Und genau das sollte man auch tun.
| Generation 7 Electronics | Teacup Firmware | RepRap DIY |
|
Re: ramps1.4 nur Probleme :/ 02. September 2014 06:58 |
Registrierungsdatum: 11 Jahre zuvor Beiträge: 254 |
Lieber Skillertheking
Traumflug der Besserwisser wird dein Problem zügig aus der Welt schaffen.
Viel Glück
Niggi
"Zum Poti: ganz nach links, dann eine Viertel Umdrehung aufdrehen. Dazu den Motor ausbauen oder zumindest den Riemen herunter nehmen. Dann läuft er auf jeden Fall ... wenn die Verdrahtung stimmt.
Bei Motoren mit 6 Drähten ist die Verkabelung etwas schwieriger. Geht am besten mit einem Multimeter. Erst mal die beiden Spulen voneinander trennen: 3 Drähte haben keinen Kontakt zu den anderen drei Drähten. Jede dieser beiden Dreiergruppen gehört zu jeweils einer Spule.
Innerhalb einer Dreiergruppe kann man 2 Paarungen mit geringem Widerstand und eine Paarung mit dem doppelten dieses geringen Widerstands finden. Dabei jeden Draht gegen jeden anderen Draht messen. Dieses eine Paar mit dem höheren Widerstand in jeder Gruppe ist das Paar, das man braucht. Den dritten Draht ignorieren.
Dann das eine Paar auf die linken beiden Kontakte des Steckers, das andere Paar auf die rechten beiden Kontakte. Dann sollte er laufen. Läuft er falsch herum, die beiden Drähte von einem der beiden Paare vertauschen.
Endstops erst mal beiseite lassen. Selbst bei der Marlin laufen die Motoren auch mit fehlerhaften Endstops zumindest in eine Richtung. Also beide Richtungen probieren.
G-code am besten von Hand senden. Klicken ist Glücksspiel. Mit einem Serial Terminal, z.B. PuTTY, TeraTerm, GtkTerm oder CoolTerm. Oder zumindest mit Pronterface, das den G-code nur wenig verschlimmbessert."
Das hat Dir sicher schon viel gebracht
Das ist ja strukturiert, und hochanalytisch
1-mal bearbeitet. Zuletzt am 02.09.14 07:13.
Früher waren es Modell-Helis aber bei meinen Flugkünsten waren die Ersatzteile zu teuer...
Vielleicht werden mit meinem Mendel90 Ersatzteile billiger und besser ;-)
Traumflug der Besserwisser wird dein Problem zügig aus der Welt schaffen.
Viel Glück
Niggi
"Zum Poti: ganz nach links, dann eine Viertel Umdrehung aufdrehen. Dazu den Motor ausbauen oder zumindest den Riemen herunter nehmen. Dann läuft er auf jeden Fall ... wenn die Verdrahtung stimmt.
Bei Motoren mit 6 Drähten ist die Verkabelung etwas schwieriger. Geht am besten mit einem Multimeter. Erst mal die beiden Spulen voneinander trennen: 3 Drähte haben keinen Kontakt zu den anderen drei Drähten. Jede dieser beiden Dreiergruppen gehört zu jeweils einer Spule.
Innerhalb einer Dreiergruppe kann man 2 Paarungen mit geringem Widerstand und eine Paarung mit dem doppelten dieses geringen Widerstands finden. Dabei jeden Draht gegen jeden anderen Draht messen. Dieses eine Paar mit dem höheren Widerstand in jeder Gruppe ist das Paar, das man braucht. Den dritten Draht ignorieren.
Dann das eine Paar auf die linken beiden Kontakte des Steckers, das andere Paar auf die rechten beiden Kontakte. Dann sollte er laufen. Läuft er falsch herum, die beiden Drähte von einem der beiden Paare vertauschen.
Endstops erst mal beiseite lassen. Selbst bei der Marlin laufen die Motoren auch mit fehlerhaften Endstops zumindest in eine Richtung. Also beide Richtungen probieren.
G-code am besten von Hand senden. Klicken ist Glücksspiel. Mit einem Serial Terminal, z.B. PuTTY, TeraTerm, GtkTerm oder CoolTerm. Oder zumindest mit Pronterface, das den G-code nur wenig verschlimmbessert."
Das hat Dir sicher schon viel gebracht
Das ist ja strukturiert, und hochanalytisch
1-mal bearbeitet. Zuletzt am 02.09.14 07:13.
Früher waren es Modell-Helis aber bei meinen Flugkünsten waren die Ersatzteile zu teuer...
Vielleicht werden mit meinem Mendel90 Ersatzteile billiger und besser ;-)
|
Re: ramps1.4 nur Probleme :/ 02. September 2014 10:48 |
Registrierungsdatum: 9 Jahre zuvor Beiträge: 4.977 |
Traumflug hat allerdings recht!
Wie man im Verlauf des Threads gesehen hat sind die Motoren noch nicht richtig verkabelt. Wenn man dann versucht etwas in der Firmware einzustellen kommt man sicherlich nicht weiter!
Wie man im Verlauf des Threads gesehen hat sind die Motoren noch nicht richtig verkabelt. Wenn man dann versucht etwas in der Firmware einzustellen kommt man sicherlich nicht weiter!
| Triffid Hunter's Calibration Guide | --> X <-- Drill for new Monitor | Most important Gcode. |
|
Re: ramps1.4 nur Probleme :/ 02. September 2014 11:37 |
Registrierungsdatum: 9 Jahre zuvor Beiträge: 38 |
so leute  jetzt bin ich wirklich verwirrt
jetzt bin ich wirklich verwirrt
repetier firmware confi.h
2 endstops angeschlossen x min/max an den angehängten bildern sieht man das sie funktionieren
und wie gehts jetzt weiter ? ausschlussverfahren?
jetzt bin ich wirklich verwirrtrepetier firmware confi.h
Quote
/* This file is part of Repetier-Firmware. Repetier-Firmware is free software: you can redistribute it and/or modify it under the terms of the GNU General Public License as published by the Free Software Foundation, either version 3 of the License, or (at your option) any later version. Repetier-Firmware is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU General Public License for more details. You should have received a copy of the GNU General Public License along with Repetier-Firmware. If not, see [www.gnu.org]. */ #ifndef CONFIGURATION_H #define CONFIGURATION_H /**************** READ FIRST ************************ This configuration file was created with the configuration tool. For that reason, it does not contain the same informations as the original Configuration.h file. It misses the comments and unused parts. Open this file file in the config tool to see and change the data. You can also upload it to newer/older versions. The system will silently add new options, so compilation continues to work. This file is optimized for version 0.91 generator: [www.repetier.com] If you are in doubt which named functions use which pins on your board, please check the pins.h for the used name->pin assignments and your board documentation to verify it is as you expect. */ #define NUM_EXTRUDER 1 #define MOTHERBOARD 33 #include "pins.h" // ################## EDIT THESE SETTINGS MANUALLY ################ // ################ END MANUAL SETTINGS ########################## #define FAN_BOARD_PIN -1 //#define EXTERNALSERIAL use Arduino serial library instead of build in. Requires more ram, has only 63 byte input buffer. // Uncomment the following line if you are using arduino compatible firmware made for Arduino version earlier then 1.0 // If it is incompatible you will get compiler errors about write functions not beeing compatible! //#define COMPAT_PRE1 #define DRIVE_SYSTEM 0 #define XAXIS_STEPS_PER_MM 80 #define YAXIS_STEPS_PER_MM 80 #define ZAXIS_STEPS_PER_MM 80 #define EXTRUDER_FAN_COOL_TEMP 50 #define EXT0_X_OFFSET 0 #define EXT0_Y_OFFSET 0 #define EXT0_STEPS_PER_MM 370 #define EXT0_TEMPSENSOR_TYPE 1 #define EXT0_TEMPSENSOR_PIN TEMP_0_PIN #define EXT0_HEATER_PIN HEATER_0_PIN #define EXT0_STEP_PIN ORIG_E0_STEP_PIN #define EXT0_DIR_PIN ORIG_E0_DIR_PIN #define EXT0_INVERSE 0 #define EXT0_ENABLE_PIN E0_ENABLE_PIN #define EXT0_ENABLE_ON 0 #define EXT0_MAX_FEEDRATE 50 #define EXT0_MAX_START_FEEDRATE 20 #define EXT0_MAX_ACCELERATION 5000 #define EXT0_HEAT_MANAGER 3 #define EXT0_WATCHPERIOD 1 #define EXT0_PID_INTEGRAL_DRIVE_MAX 230 #define EXT0_PID_INTEGRAL_DRIVE_MIN 40 #define EXT0_PID_P 7 #define EXT0_PID_I 2 #define EXT0_PID_D 40 #define EXT0_PID_MAX 255 #define EXT0_ADVANCE_K 0 #define EXT0_ADVANCE_L 0 #define EXT0_ADVANCE_BACKLASH_STEPS 0 #define EXT0_WAIT_RETRACT_TEMP 150 #define EXT0_WAIT_RETRACT_UNITS 0 #define EXT0_SELECT_COMMANDS "" #define EXT0_DESELECT_COMMANDS "" #define EXT0_EXTRUDER_COOLER_PIN -1 #define EXT0_EXTRUDER_COOLER_SPEED 255 #define RETRACT_DURING_HEATUP true #define PID_CONTROL_RANGE 20 #define SKIP_M109_IF_WITHIN 2 #define SCALE_PID_TO_MAX 0 #define TEMP_HYSTERESIS 0 #define EXTRUDE_MAXLENGTH 160 #define NUM_TEMPS_USERTHERMISTOR0 0 #define USER_THERMISTORTABLE0 {} #define NUM_TEMPS_USERTHERMISTOR1 0 #define USER_THERMISTORTABLE1 {} #define NUM_TEMPS_USERTHERMISTOR2 0 #define USER_THERMISTORTABLE2 {} #define GENERIC_THERM_VREF 5 #define GENERIC_THERM_NUM_ENTRIES 33 #define HEATER_PWM_SPEED 0 // ############# Heated bed configuration ######################## #define HAVE_HEATED_BED 0 #define HEATED_BED_MAX_TEMP 120 #define SKIP_M190_IF_WITHIN 3 #define HEATED_BED_SENSOR_TYPE 1 #define HEATED_BED_SENSOR_PIN TEMP_1_PIN #define HEATED_BED_HEATER_PIN HEATER_1_PIN #define HEATED_BED_SET_INTERVAL 5000 #define HEATED_BED_HEAT_MANAGER 0 #define HEATED_BED_PID_INTEGRAL_DRIVE_MAX 255 #define HEATED_BED_PID_INTEGRAL_DRIVE_MIN 80 #define HEATED_BED_PID_PGAIN 196 #define HEATED_BED_PID_IGAIN 33 #define HEATED_BED_PID_DGAIN 290 #define HEATED_BED_PID_MAX 255 #define MIN_EXTRUDER_TEMP 150 #define MAXTEMP 275 #define MIN_DEFECT_TEMPERATURE -10 #define MAX_DEFECT_TEMPERATURE 290 // ################ Endstop configuration ##################### #define ENDSTOP_PULLUP_X_MIN true #define ENDSTOP_X_MIN_INVERTING true #define MIN_HARDWARE_ENDSTOP_X true #define ENDSTOP_PULLUP_Y_MIN false #define ENDSTOP_Y_MIN_INVERTING false #define MIN_HARDWARE_ENDSTOP_Y false #define ENDSTOP_PULLUP_Z_MIN false #define ENDSTOP_Z_MIN_INVERTING false #define MIN_HARDWARE_ENDSTOP_Z false #define ENDSTOP_PULLUP_X_MAX true #define ENDSTOP_X_MAX_INVERTING true #define MAX_HARDWARE_ENDSTOP_X true #define ENDSTOP_PULLUP_Y_MAX true #define ENDSTOP_Y_MAX_INVERTING false #define MAX_HARDWARE_ENDSTOP_Y false #define ENDSTOP_PULLUP_Z_MAX false #define ENDSTOP_Z_MAX_INVERTING false #define MAX_HARDWARE_ENDSTOP_Z false #define max_software_endstop_r false #define min_software_endstop_x true #define min_software_endstop_y false #define min_software_endstop_z false #define max_software_endstop_x true #define max_software_endstop_y false #define max_software_endstop_z false #define ENDSTOP_X_BACK_MOVE 5 #define ENDSTOP_Y_BACK_MOVE 5 #define ENDSTOP_Z_BACK_MOVE 2 #define ENDSTOP_X_RETEST_REDUCTION_FACTOR 3 #define ENDSTOP_Y_RETEST_REDUCTION_FACTOR 3 #define ENDSTOP_Z_RETEST_REDUCTION_FACTOR 3 #define ENDSTOP_X_BACK_ON_HOME 1 #define ENDSTOP_Y_BACK_ON_HOME 1 #define ENDSTOP_Z_BACK_ON_HOME 0 #define ALWAYS_CHECK_ENDSTOPS 1 // ################# XYZ movements ################### #define X_ENABLE_ON 0 #define Y_ENABLE_ON 0 #define Z_ENABLE_ON 0 #define DISABLE_X 0 #define DISABLE_Y 0 #define DISABLE_Z 0 #define DISABLE_E 0 #define INVERT_X_DIR 0 #define INVERT_Y_DIR 0 #define INVERT_Z_DIR 0 #define X_HOME_DIR -1 #define Y_HOME_DIR -1 #define Z_HOME_DIR -1 #define X_MAX_LENGTH 200 #define Y_MAX_LENGTH 200 #define Z_MAX_LENGTH 120 #define X_MIN_POS 0 #define Y_MIN_POS 0 #define Z_MIN_POS 0 // ########################################################################################## // ## Movement settings ## // ########################################################################################## #define FEATURE_BABYSTEPPING 1 #define BABYSTEP_MULTIPLICATOR 1 #define DELTA_SEGMENTS_PER_SECOND_PRINT 180 // Move accurate setting for print moves #define DELTA_SEGMENTS_PER_SECOND_MOVE 70 // Less accurate setting for other moves // Delta settings #define DELTA_HOME_ON_POWER 0 #define MAX_DELTA_SEGMENTS_PER_LINE 24 #define STEPPER_INACTIVE_TIME 360L #define MAX_INACTIVE_TIME 0L #define MAX_FEEDRATE_X 200 #define MAX_FEEDRATE_Y 200 #define MAX_FEEDRATE_Z 2 #define HOMING_FEEDRATE_X 40 #define HOMING_FEEDRATE_Y 40 #define HOMING_FEEDRATE_Z 2 #define HOMING_ORDER HOME_ORDER_ZXY #define ENABLE_BACKLASH_COMPENSATION 0 #define X_BACKLASH 0 #define Y_BACKLASH 0 #define Z_BACKLASH 0 #define RAMP_ACCELERATION 1 #define STEPPER_HIGH_DELAY 0 #define STEP_DOUBLER_FREQUENCY 12000 #define ALLOW_QUADSTEPPING 1 #define DOUBLE_STEP_DELAY 1 // time in microseconds #define MAX_HALFSTEP_INTERVAL 1999 #define MAX_ACCELERATION_UNITS_PER_SQ_SECOND_X 1000 #define MAX_ACCELERATION_UNITS_PER_SQ_SECOND_Y 1000 #define MAX_ACCELERATION_UNITS_PER_SQ_SECOND_Z 100 #define MAX_TRAVEL_ACCELERATION_UNITS_PER_SQ_SECOND_X 1000 #define MAX_TRAVEL_ACCELERATION_UNITS_PER_SQ_SECOND_Y 1000 #define MAX_TRAVEL_ACCELERATION_UNITS_PER_SQ_SECOND_Z 100 #define MAX_JERK 20 #define MAX_ZJERK 0.3 #define MOVE_CACHE_SIZE 16 #define MOVE_CACHE_LOW 10 #define LOW_TICKS_PER_MOVE 250000 #define FEATURE_TWO_XSTEPPER 0 #define X2_STEP_PIN ORIG_E1_STEP_PIN #define X2_DIR_PIN ORIG_E1_DIR_PIN #define X2_ENABLE_PIN E1_ENABLE_PIN #define FEATURE_TWO_YSTEPPER 0 #define Y2_STEP_PIN ORIG_E1_STEP_PIN #define Y2_DIR_PIN ORIG_E1_DIR_PIN #define Y2_ENABLE_PIN E1_ENABLE_PIN #define FEATURE_TWO_ZSTEPPER 0 #define Z2_STEP_PIN ORIG_E1_STEP_PIN #define Z2_DIR_PIN ORIG_E1_DIR_PIN #define Z2_ENABLE_PIN E1_ENABLE_PIN #define FEATURE_DITTO_PRINTING 0 // ################# Misc. settings ################## #define BAUDRATE 115200 #define ENABLE_POWER_ON_STARTUP #define POWER_INVERTING 0 #define KILL_METHOD 1 #define GCODE_BUFFER_SIZE 2 #define ACK_WITH_LINENUMBER #define WAITING_IDENTIFIER "wait" #define ECHO_ON_EXECUTE #define EEPROM_MODE 1 /* ======== Servos ======= Control the servos with M340 P S / ServoID = 0..3 pulseInUs = 500..2500 Servos are controlled by a pulse width normally between 500 and 2500 with 1500ms in center position. 0 turns servo off. WARNING: Servos can draw a considerable amount of current. Make sure your system can handle this or you may risk your hardware! */ #define FEATURE_SERVO 0 #define SERVO0_PIN 11 #define SERVO1_PIN -1 #define SERVO2_PIN -1 #define SERVO3_PIN -1 #define FEATURE_WATCHDOG 0 // #################### Z-Probing ##################### #define FEATURE_Z_PROBE 0 #define Z_PROBE_BED_DISTANCE 10 #define Z_PROBE_PIN -1 #define Z_PROBE_PULLUP 0 #define Z_PROBE_ON_HIGH 0 #define Z_PROBE_X_OFFSET 0 #define Z_PROBE_Y_OFFSET 0 #define Z_PROBE_WAIT_BEFORE_TEST 0 #define Z_PROBE_SPEED 2 #define Z_PROBE_XY_SPEED 150 #define Z_PROBE_SWITCHING_DISTANCE 1 #define Z_PROBE_REPETITIONS 1 #define Z_PROBE_HEIGHT 40 #define Z_PROBE_START_SCRIPT "" #define Z_PROBE_FINISHED_SCRIPT "" #define FEATURE_AUTOLEVEL 1 #define Z_PROBE_X1 20 #define Z_PROBE_Y1 20 #define Z_PROBE_X2 160 #define Z_PROBE_Y2 20 #define Z_PROBE_X3 100 #define Z_PROBE_Y3 160 #ifndef SDSUPPORT // Some boards have sd support on board. These define the values already in pins.h #define SDSUPPORT 0 #define SDCARDDETECT -1 #define SDCARDDETECTINVERTED 0 #endif #define SD_EXTENDED_DIR 1 /** Show extended directory including file length. Don't use this with Pronterface! */ #define ARC_SUPPORT 1 #define FEATURE_MEMORY_POSITION 1 #define FEATURE_CHECKSUM_FORCED 0 #define FEATURE_FAN_CONTROL 1 #define FEATURE_CONTROLLER 2 #define UI_LANGUAGE 1 #define UI_PRINTER_NAME "RepRap" #define UI_PRINTER_COMPANY "Home made" #define UI_PAGES_DURATION 4000 #define UI_ANIMATION 0 #define UI_SPEEDDEPENDENT_POSITIONING 0 #define UI_DISABLE_AUTO_PAGESWITCH 0 #define UI_AUTORETURN_TO_MENU_AFTER 30000 #define FEATURE_UI_KEYS 0 #define UI_ENCODER_SPEED 0 #define UI_KEY_BOUNCETIME 10 #define UI_KEY_FIRST_REPEAT 500 #define UI_KEY_REDUCE_REPEAT 50 #define UI_KEY_MIN_REPEAT 50 #define FEATURE_BEEPER 1 #define CASE_LIGHTS_PIN -1 #define CASE_LIGHT_DEFAULT_ON 1 #define UI_START_SCREEN_DELAY 1000 /** Beeper sound definitions for short beeps during key actions and longer beeps for important actions. Parameter is delay in microseconds and the secons is the number of repetitions. Values must be in range 1..255 */ #define BEEPER_SHORT_SEQUENCE 2,2 #define BEEPER_LONG_SEQUENCE 8,8 #define UI_SET_PRESET_HEATED_BED_TEMP_PLA 60 #define UI_SET_PRESET_EXTRUDER_TEMP_PLA 190 #define UI_SET_PRESET_HEATED_BED_TEMP_ABS 110 #define UI_SET_PRESET_EXTRUDER_TEMP_ABS 240 #define UI_SET_MIN_HEATED_BED_TEMP 30 #define UI_SET_MAX_HEATED_BED_TEMP 120 #define UI_SET_MIN_EXTRUDER_TEMP 170 #define UI_SET_MAX_EXTRUDER_TEMP 260 #define UI_SET_EXTRUDER_FEEDRATE 2 #define UI_SET_EXTRUDER_RETRACT_DISTANCE 3 #endif /* Below you will find the configuration string, that created this Configuration.h ========== Start configuration string ========== { "editMode": 0, "processor": 0, "baudrate": 115200, "xStepsPerMM": 80, "yStepsPerMM": 80, "zStepsPerMM": 80, "xInvert": 0, "xInvertEnable": 0, "eepromMode": 1, "yInvert": 0, "yInvertEnable": 0, "zInvert": 0, "zInvertEnable": 0, "extruder": [[/color] { "id": 0, "heatManager": 3, "pidDriveMin": 40, "pidDriveMax": 230, "pidMax": 255, "sensorType": 1, "sensorPin": "TEMP_0_PIN", "heaterPin": "HEATER_0_PIN", "maxFeedrate": 50, "startFeedrate": 20, "invert": "0", "invertEnable": "0", "acceleration": 5000, "watchPeriod": 1, "pidP": 7, "pidI": 2, "pidD": 40, "advanceK": 0, "advanceL": 0, "waitRetractTemp": 150, "waitRetractUnits": 0, "waitRetract": 0, "stepsPerMM": 370, "coolerPin": -1, "coolerSpeed": 255, "selectCommands": "", "deselectCommands": "", "xOffset": 0, "yOffset": 0, "xOffsetSteps": 0, "yOffsetSteps": 0, "stepper": { "name": "Extruder 0", "step": "ORIG_E0_STEP_PIN", "dir": "ORIG_E0_DIR_PIN", "enable": "E0_ENABLE_PIN" }, "advanceBacklashSteps": 0 } ], "uiLanguage": 1, "uiController": 0, "xMinEndstop": 1, "yMinEndstop": 0, "zMinEndstop": 0, "xMaxEndstop": 0, "yMaxEndstop": 0, "zMaxEndstop": 0, "motherboard": 33, "driveSystem": 0, "xMaxSpeed": 200, "xHomingSpeed": 40, "xTravelAcceleration": 1000, "xPrintAcceleration": 1000, "yMaxSpeed": 200, "yHomingSpeed": 40, "yTravelAcceleration": 1000, "yPrintAcceleration": 1000, "zMaxSpeed": 2, "zHomingSpeed": 2, "zTravelAcceleration": 100, "zPrintAcceleration": 100, "xMotor": { "name": "X motor", "step": "ORIG_X_STEP_PIN", "dir": "ORIG_X_DIR_PIN", "enable": "ORIG_X_ENABLE_PIN" }, "yMotor": { "name": "Y motor", "step": "ORIG_Y_STEP_PIN", "dir": "ORIG_Y_DIR_PIN", "enable": "ORIG_Y_ENABLE_PIN" }, "zMotor": { "name": "Z motor", "step": "ORIG_Z_STEP_PIN", "dir": "ORIG_Z_DIR_PIN", "enable": "ORIG_Z_ENABLE_PIN" }, "enableBacklash": "0", "backlashX": 0, "backlashY": 0, "backlashZ": 0, "stepperInactiveTime": 360, "maxInactiveTime": 0, "xMinPos": 0, "yMinPos": 0, "zMinPos": 0, "xLength": 200, "yLength": 200, "zLength": 120, "alwaysCheckEndstops": "1", "disableX": "0", "disableY": "0", "disableZ": "0", "disableE": "0", "xHomeDir": "-1", "yHomeDir": "-1", "zHomeDir": "-1", "xEndstopBack": 1, "yEndstopBack": 1, "zEndstopBack": 0, "deltaSegmentsPerSecondPrint": 180, "deltaSegmentsPerSecondTravel": 70, "deltaDiagonalRod": 445, "deltaHorizontalRadius": 209.25, "deltaAlphaA": 210, "deltaAlphaB": 330, "deltaAlphaC": 90, "deltaDiagonalCorrA": 0, "deltaDiagonalCorrB": 0, "deltaDiagonalCorrC": 0, "deltaMaxRadius": 150, "deltaRadiusCorrA": 0, "deltaRadiusCorrB": 0, "deltaRadiusCorrC": 0, "deltaXOffsetSteps": 0, "deltaYOffsetSteps": 0, "deltaZOffsetSteps": 0, "deltaSegmentsPerLine": 24, "stepperHighDelay": 0, "stepDoublerFrequency": 12000, "allowQuadstepping": "1", "doubleStepDelay": 1, "maxHalfstepInterval": 1999, "maxJerk": 20, "maxZJerk": 0.3, "moveCacheSize": 16, "moveCacheLow": 10, "lowTicksPerMove": 250000, "enablePowerOnStartup": "1", "echoOnExecute": "1", "sendWaits": "1", "ackWithLineNumber": "1", "killMethod": 1, "useAdvance": "0", "useQuadraticAdvance": "0", "powerInverting": 0, "mirrorX": 0, "mirrorXMotor": { "name": "Extruder 1", "step": "ORIG_E1_STEP_PIN", "dir": "ORIG_E1_DIR_PIN", "enable": "E1_ENABLE_PIN" }, "mirrorY": 0, "mirrorYMotor": { "name": "Extruder 1", "step": "ORIG_E1_STEP_PIN", "dir": "ORIG_E1_DIR_PIN", "enable": "E1_ENABLE_PIN" }, "mirrorZ": 0, "mirrorZMotor": { "name": "Extruder 1", "step": "ORIG_E1_STEP_PIN", "dir": "ORIG_E1_DIR_PIN", "enable": "E1_ENABLE_PIN" }, "dittoPrinting": "0", "featureServos": "0", "servo0Pin": 11, "servo1Pin": -1, "servo2Pin": -1, "servo3Pin": -1, "featureWatchdog": "0", "hasHeatedBed": "0", "enableZProbing": "0", "extrudeMaxLength": 160, "homeOrder": "HOME_ORDER_ZXY", "featureController": 2, "uiPrinterName": "RepRap", "uiPrinterCompany": "Home made", "uiPagesDuration": 4000, "uiAnimation": "0", "uiDisablePageswitch": "0", "uiAutoReturnAfter": 30000, "featureKeys": "0", "uiEncoderSpeed": 0, "uiKeyBouncetime": 10, "uiKeyFirstRepeat": 500, "uiKeyReduceRepeat": 50, "uiKeyMinRepeat": 50, "featureBeeper": "1", "uiPresetBedTempPLA": 60, "uiPresetBedABS": 110, "uiPresetExtruderPLA": 190, "uiPresetExtruderABS": 240, "uiMinHeatedBed": 30, "uiMaxHeatedBed": 120, "uiMinEtxruderTemp": 170, "uiMaxExtruderTemp": 260, "uiExtruderFeedrate": 2, "uiExtruderRetractDistance": 3, "uiSpeeddependentPositioning": "0", "maxBedTemperature": 120, "bedSensorType": 1, "bedSensorPin": "TEMP_1_PIN", "bedHeaterPin": "HEATER_1_PIN", "bedHeatManager": 0, "bedUpdateInterval": 5000, "bedPidDriveMin": 80, "bedPidDriveMax": 255, "bedPidP": 196, "bedPidI": 33, "bedPidD": 290, "bedPidMax": 255, "caseLightPin": -1, "caseLightDefaultOn": "1", "bedSkipIfWithin": 3, "gen1T0": 25, "gen1R0": 100000, "gen1Beta": 4036, "gen1MinTemp": -20, "gen1MaxTemp": 300, "gen1R1": 0, "gen1R2": 4700, "gen2T0": 25, "gen2R0": 100000, "gen2Beta": 4036, "gen2MinTemp": -20, "gen2MaxTemp": 300, "gen2R1": 0, "gen2R2": 4700, "gen3T0": 25, "gen3R0": 100000, "gen3Beta": 4036, "gen3MinTemp": -20, "gen3MaxTemp": 300, "gen3R1": 0, "gen3R2": 4700, "userTable0": { "r1": 0, "r2": 4700, "temps": [[/color] ] }, "userTable1": { "r1": 0, "r2": 4700, "temps": [[/color] ] }, "userTable2": { "r1": 0, "r2": 4700, "temps": [[/color] ] }, "tempHysteresis": 0, "pidControlRange": 20, "skipM109Within": 2, "extruderFanCoolTemp": 50, "minTemp": 150, "maxTemp": 275, "minDefectTemp": -10, "maxDefectTemp": 290, "arcSupport": "1", "featureMemoryPositionWatchdog": "1", "forceChecksum": "0", "sdExtendedDir": "1", "featureFanControl": "1", "fanPin": "ORIG_FAN_PIN", "scalePidToMax": 0, "zProbePin": -1, "zProbeBedDistance": 10, "zProbePullup": "0", "zProbeOnHigh": "0", "zProbeXOffset": 0, "zProbeYOffset": 0, "zProbeWaitBeforeTest": "0", "zProbeSpeed": 2, "zProbeXYSpeed": 150, "zProbeHeight": 40, "zProbeStartScript": "", "zProbeFinishedScript": "", "featureAutolevel": "1", "zProbeX1": 20, "zProbeY1": 20, "zProbeX2": 160, "zProbeY2": 20, "zProbeX3": 100, "zProbeY3": 160, "zProbeSwitchingDistance": 1, "zProbeRepetitions": 1, "sdSupport": "0", "sdCardDetectPin": -1, "sdCardDetectInverted": "0", "uiStartScreenDelay": 1000, "xEndstopBackMove": 5, "yEndstopBackMove": 5, "zEndstopBackMove": 2, "xEndstopRetestFactor": 3, "yEndstopRetestFactor": 3, "zEndstopRetestFactor": 3, "xMinPin": "ORIG_X_MIN_PIN", "yMinPin": "ORIG_Y_MIN_PIN", "zMinPin": "ORIG_Z_MIN_PIN", "xMaxPin": "ORIG_X_MAX_PIN", "yMaxPin": "ORIG_Y_MAX_PIN", "zMaxPin": "ORIG_Z_MAX_PIN", "deltaHomeOnPower": "0", "fanBoardPin": -1, "heaterPWMSpeed": 0, "featureBabystepping": "1", "babystepMultiplicator": 1, "hasMAX6675": false, "hasMAX31855": false, "hasGeneric1": false, "hasGeneric2": false, "hasGeneric3": false, "hasUser0": false, "hasUser1": false, "hasUser2": false, "numExtruder": 1, "version": 91.7 } ========== End configuration string ========== */
2 endstops angeschlossen x min/max an den angehängten bildern sieht man das sie funktionieren
und wie gehts jetzt weiter ? ausschlussverfahren?
|
Re: ramps1.4 nur Probleme :/ 02. September 2014 12:56 |
Registrierungsdatum: 9 Jahre zuvor Beiträge: 4.977 |
Vergiss die Firmware und versuch erstmal die richtigen Kabel deiner Motoren, nach der Methode die Traumflug beschrieben hat, zu finden.
| Triffid Hunter's Calibration Guide | --> X <-- Drill for new Monitor | Most important Gcode. |

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
In diesem Forum dürfen leider nur registrierte Teilnehmer schreiben.