Home
>
RepRap User Groups
>
Europe
>
Deutschsprachiges Forum
>
Elektrik & Elektronik
>
Thema
>
Seite 2
Hat jemand Full Graphic Smart LCD Controller von reprapdiscount am laufen?
geschrieben von Twister
|
Re: Hat jemand Full Graphic Smart LCD Controller von reprapdiscount am laufen? 09. August 2014 07:10 |
Registrierungsdatum: 11 Jahre zuvor Beiträge: 51 |
Also ich fand die kurze Anleitung von Andreas schonmal hilfreich ... bei mit hat der aber nach dem einfügen der Lib automatisch #include in meine marlin_delta eingefügt .... daher habe ich das nicht mehr gemacht
Funktionieren tut es aber jetzt trotzdem nicht .... strom und klickgeräusche habe ich .... aber auch nur wenn das USB Kabel dran ist. Ist das normal?
Danke
Edit: Jetzt klappt es auch bei mir ... wer lesen kann ist klar im Vorteil ... ich hatte in der define Zeile das FULL nicht drin ... die sind aber auch leicht zu verwechseln
1-mal bearbeitet. Zuletzt am 09.08.14 07:33.
Funktionieren tut es aber jetzt trotzdem nicht .... strom und klickgeräusche habe ich .... aber auch nur wenn das USB Kabel dran ist. Ist das normal?
Danke
Edit: Jetzt klappt es auch bei mir ... wer lesen kann ist klar im Vorteil ... ich hatte in der define Zeile das FULL nicht drin ... die sind aber auch leicht zu verwechseln
Quote
Andreas
Also dein Ansatz ist schon mal richtig, die beiden Zeilen dürfen nicht auskommentiert sein in der Config-Datei. Die ist im Marlin-Ordner zu finden, "Configuration.h". Diese mit einem Editor öffnen (Tipp: Notepad++ ist eine gute Freeware für sowas) und die beiden Zeilen suchen und die "//" davor entfernen. Dann fehlt noch die u8g-Lib in der Arudino-IDE. Dazu die IDE starten und Sketch->Library importieren->Library hinzufügen den Ordner mit der Library auswählen. Danach muss noch der Firmware gesagt werden, dass die Library genutzt werden soll. Dazu muss in, nach dem öffnen von Marlin.ino, die Zeile #include eingefügt werden. Damit das ganze dann hardwareseitig funktioniert, muss noch der Ramps mit dem LCD richtig verbunden sein. Die Stecker sind beschriftet, einfach die passenden miteinander verbinden. Danach die Firmware hochladen und schon müsst alles laufen
1-mal bearbeitet. Zuletzt am 09.08.14 07:33.
|
Re: Hat jemand Full Graphic Smart LCD Controller von reprapdiscount am laufen? 14. August 2014 13:05 |
Registrierungsdatum: 11 Jahre zuvor Beiträge: 51 |
Hat es jemand schonmal hinbekommen die überflüssigen Extruder aus der Status-Übersicht zu entfernen? Ich habe nur einen Extruder und will mir die anderen beiden Extruder nicht anzeigen lassen ...
Ich weiß zwar wie man das macht, aber es hat noch nicht zum Erfolg geführt
In Marlin muss man in die DOGMbitmaps.h gehen und die zwei unteren Bilder anpassen ... da habe ich schon diverses ausprobiert ... es kommt nur Pixelsalat raus ...
Bei dem Startbildschirm (oberes Bild in DOGMbitmaps) klappt es aber ... sehr kurios ... ich vermute das hängt mit der bytewith zusammen ... keine Ahnung wofür die steht
Danke
Ich weiß zwar wie man das macht, aber es hat noch nicht zum Erfolg geführt
In Marlin muss man in die DOGMbitmaps.h gehen und die zwei unteren Bilder anpassen ... da habe ich schon diverses ausprobiert ... es kommt nur Pixelsalat raus ...
Bei dem Startbildschirm (oberes Bild in DOGMbitmaps) klappt es aber ... sehr kurios ... ich vermute das hängt mit der bytewith zusammen ... keine Ahnung wofür die steht
Danke
|
Re: Hat jemand Full Graphic Smart LCD Controller von reprapdiscount am laufen? 12. November 2014 08:59 |
Registrierungsdatum: 11 Jahre zuvor Beiträge: 188 |
Quote
Tom82
Hat es jemand schonmal hinbekommen die überflüssigen Extruder aus der Status-Übersicht zu entfernen? Ich habe nur einen Extruder und will mir die anderen beiden Extruder nicht anzeigen lassen ...
Hi Tom, ist bei Dir lange her, wollte das bei mir aber grade auch raus haben, ging gut. Hab die Ergebnisse in die Wiki geschrieben.
[reprap.org]
LG
Jonas
|
Re: Hat jemand Full Graphic Smart LCD Controller von reprapdiscount am laufen? 12. November 2014 21:00 |
Registrierungsdatum: 11 Jahre zuvor Beiträge: 188 |
|
Re: Hat jemand Full Graphic Smart LCD Controller von reprapdiscount am laufen? 16. December 2014 18:18 |
Registrierungsdatum: 9 Jahre zuvor Beiträge: 18 |
Hallo
Ich habe alles so definiert wie hier beschrieben und funktioniert ohne Display super! Sobald ich jedoch das Graphic Display rein kommentieren will kann ich Marlin nicht mehr kompilieren. Es kommt immer folgende Fehlermeldung:
cardreader.cpp: In member function 'void CardReader::startFileprint()':
cardreader.cpp:208: error: 'flush_presort' was not declared in this scope
Was mach ich falsch?
Danke!
Sparknoob
Ich habe alles so definiert wie hier beschrieben und funktioniert ohne Display super! Sobald ich jedoch das Graphic Display rein kommentieren will kann ich Marlin nicht mehr kompilieren. Es kommt immer folgende Fehlermeldung:
cardreader.cpp: In member function 'void CardReader::startFileprint()':
cardreader.cpp:208: error: 'flush_presort' was not declared in this scope
Was mach ich falsch?
Danke!
Sparknoob
|
Re: Hat jemand Full Graphic Smart LCD Controller von reprapdiscount am laufen? 17. December 2014 12:24 |
Registrierungsdatum: 10 Jahre zuvor Beiträge: 55 |
|
Re: Hat jemand Full Graphic Smart LCD Controller von reprapdiscount am laufen? 18. December 2014 02:02 |
Registrierungsdatum: 9 Jahre zuvor Beiträge: 18 |
|
Re: Hat jemand Full Graphic Smart LCD Controller von reprapdiscount am laufen? 21. December 2014 10:58 |
Registrierungsdatum: 10 Jahre zuvor Beiträge: 55 |
|
Re: Hat jemand Full Graphic Smart LCD Controller von reprapdiscount am laufen? 26. March 2015 14:41 |
Registrierungsdatum: 9 Jahre zuvor Beiträge: 21 |
Hallo! Ich habe eine Fehler bei LCD Aktivierung. Was ist falsch bei mir?Kann jemand mir helfen?
***********************************************************************************
In file included from Marlin.h:22:0,
from cardreader.cpp:1:
Configuration.h:62:10: error: #include expects "FILENAME" or
#include
^
Fehler beim Kompilieren.
****************************************************************************************
***********************************************************************************
In file included from Marlin.h:22:0,
from cardreader.cpp:1:
Configuration.h:62:10: error: #include expects "FILENAME" or
#include
^
Fehler beim Kompilieren.
****************************************************************************************
|
Re: Hat jemand Full Graphic Smart LCD Controller von reprapdiscount am laufen? 26. March 2015 14:47 |
Registrierungsdatum: 9 Jahre zuvor Beiträge: 21 |
|
Re: Hat jemand Full Graphic Smart LCD Controller von reprapdiscount am laufen? 26. March 2015 15:16 |
Registrierungsdatum: 11 Jahre zuvor Beiträge: 2.469 |
selber gebastelt die firmware?
dann nimm mal original marlin übertrage deine Daten und du wirst sehen das geht dann
Commercium ----> Ramps, RADDS, e3d-Hotends und Filament kauft man hier.. und neu auch Schrauben,Muttern und Unterlegscheiben
Probleme mit dem e3d und bei mir gekauft? Schickt es ein, ich teste es für euch ob es wirklich defekt ist
Print Quality Troubleshooting Guide hier lang..
dann nimm mal original marlin übertrage deine Daten und du wirst sehen das geht dann
Commercium ----> Ramps, RADDS, e3d-Hotends und Filament kauft man hier.. und neu auch Schrauben,Muttern und Unterlegscheiben
Probleme mit dem e3d und bei mir gekauft? Schickt es ein, ich teste es für euch ob es wirklich defekt ist
Print Quality Troubleshooting Guide hier lang..
|
Re: Hat jemand Full Graphic Smart LCD Controller von reprapdiscount am laufen? 26. March 2015 15:19 |
Registrierungsdatum: 10 Jahre zuvor Beiträge: 360 |
Hallo,
also die Meldung ist doch im Klartext hingeschrieben worden.
Was kann man daran nicht verstehen?
Zeile 62 ist ein Include ohne weitere Angabe die Pflicht ist. Wie ist das denn passiert? Wieso ist das etwas gelöscht worden?
Also, los ran, Zeile 62 Korrigieren...
mfg,
Rickenharp
also die Meldung ist doch im Klartext hingeschrieben worden.
Was kann man daran nicht verstehen?
Zeile 62 ist ein Include ohne weitere Angabe die Pflicht ist. Wie ist das denn passiert? Wieso ist das etwas gelöscht worden?
Also, los ran, Zeile 62 Korrigieren...
mfg,
Rickenharp
|
Re: Hat jemand Full Graphic Smart LCD Controller von reprapdiscount am laufen? 26. March 2015 20:29 |
Registrierungsdatum: 9 Jahre zuvor Beiträge: 21 |
|
Re: Hat jemand Full Graphic Smart LCD Controller von reprapdiscount am laufen? 26. March 2015 20:35 |
Registrierungsdatum: 9 Jahre zuvor Beiträge: 21 |
#ifndef CONFIGURATION_H
#define CONFIGURATION_H
// This configuration file contains the basic settings.
// Advanced settings can be found in Configuration_adv.h
// BASIC SETTINGS: select your board type, temperature sensor type, axis scaling, and endstop configuration
// User-specified version info of this build to display in [Pronterface, etc] terminal window during
// startup. Implementation of an idea by Prof Braino to inform user that any changes made to this
// build by the user have been successfully uploaded into firmware.
#define STRING_VERSION_CONFIG_H __DATE__ " " __TIME__ // build date and time
#define STRING_CONFIG_H_AUTHOR "(FOLGERTECH, Kossel by MAKERFRONT)" // Who made the changes. ("Blomker" only edited the parametric values in the sketch. Author name is maintain as jcrocholl to indicate source of this sketch, and credit to where it is due)
// SERIAL_PORT selects which serial port should be used for communication with the host.
// This allows the connection of wireless adapters (for instance) to non-default port pins.
// Serial port 0 is still used by the Arduino bootloader regardless of this setting.
#define SERIAL_PORT 0
// This determines the communication speed of the printer
#define BAUDRATE 250000
//#define BAUDRATE 115200
//// The following define selects which electronics board you have. Please choose the one that matches your setup
// 10 = Gen7 custom (Alfons3 Version) "https://github.com/Alfons3/Generation_7_Electronics"
// 11 = Gen7 v1.1, v1.2 = 11
// 12 = Gen7 v1.3
// 13 = Gen7 v1.4
// 3 = MEGA/RAMPS up to 1.2 = 3
// 33 = RAMPS 1.3 / 1.4 (Power outputs: Extruder, Fan, Bed)
// 34 = RAMPS 1.3 / 1.4 (Power outputs: Extruder0, Extruder1, Bed)
// 35 = RAMPS 1.3 / 1.4 (Power outputs: Extruder, Fan, Fan)
// 4 = Duemilanove w/ ATMega328P pin assignment
// 5 = Gen6
// 51 = Gen6 deluxe
// 6 = Sanguinololu < 1.2
// 62 = Sanguinololu 1.2 and above
// 63 = Melzi
// 64 = STB V1.1
// 65 = Azteeg X1
// 66 = Melzi with ATmega1284 (MaKr3d version)
// 7 = Ultimaker
// 71 = Ultimaker (Older electronics. Pre 1.5.4. This is rare)
// 77 = 3Drag Controller
// 8 = Teensylu
// 80 = Rumba
// 81 = Printrboard (AT90USB1286)
// 82 = Brainwave (AT90USB646)
// 9 = Gen3+
// 70 = Megatronics
// 701= Megatronics v2.0
// 702= Minitronics v1.0
// 90 = Alpha OMCA board
// 91 = Final OMCA board
// 301 = Rambo
// 21 = Elefu Ra Board (v3)
#ifndef MOTHERBOARD
#define MOTHERBOARD 33
#endif
#define REPRAP_DISCOUNT_FULL_GRAPHIC_SMART_CONTROLLER
#include
// Define this to set a custom name for your generic Mendel,
#define CUSTOM_MENDEL_NAME "This Mendel"
// This defines the number of extruders
#define EXTRUDERS 1
//// The following define selects which power supply you have. Please choose the one that matches your setup
// 1 = ATX
// 2 = X-Box 360 203Watts (the blue wire connected to PS_ON and the red wire to VCC)
#define POWER_SUPPLY 1
//===========================================================================
//============================== Delta Settings =============================
//===========================================================================
// Enable DELTA kinematics
#define DELTA
// Make delta curves from many straight lines (linear interpolation).
// This is a trade-off between visible corners (not enough segments)
// and processor overload (too many expensive sqrt calls).
#define DELTA_SEGMENTS_PER_SECOND 200
// Center-to-center distance of the holes in the diagonal push rods.
#define DELTA_DIAGONAL_ROD 230 // mm (215)
// Horizontal offset from middle of printer to smooth rod center.
#define DELTA_SMOOTH_ROD_OFFSET 178 // mm (137.0)
// Horizontal offset of the universal joints on the end effector.
#define DELTA_EFFECTOR_OFFSET 25 // mm (19.9)
// Horizontal offset of the universal joints on the carriages.
#define DELTA_CARRIAGE_OFFSET 12.0 // mm (19.5)
// Effective horizontal distance bridged by diagonal push rods.
#define DELTA_RADIUS (DELTA_SMOOTH_ROD_OFFSET-DELTA_EFFECTOR_OFFSET-DELTA_CARRIAGE_OFFSET)
// Effective X/Y positions of the three vertical towers.
#define SIN_60 0.8660254037844386
#define COS_60 0.5
#define DELTA_TOWER1_X -SIN_60*DELTA_RADIUS // front left tower
#define DELTA_TOWER1_Y -COS_60*DELTA_RADIUS
#define DELTA_TOWER2_X SIN_60*DELTA_RADIUS // front right tower
#define DELTA_TOWER2_Y -COS_60*DELTA_RADIUS
#define DELTA_TOWER3_X 0.0 // back middle tower
#define DELTA_TOWER3_Y DELTA_RADIUS
// Diagonal rod squared
#define DELTA_DIAGONAL_ROD_2 pow(DELTA_DIAGONAL_ROD,2)
//===========================================================================
//=============================Thermal Settings ============================
//===========================================================================
//
//--NORMAL IS 4.7kohm PULLUP!-- 1kohm pullup can be used on hotend sensor, using correct resistor and table
//
//// Temperature sensor settings:
// -2 is thermocouple with MAX6675 (only for sensor 0)
// -1 is thermocouple with AD595
// 0 is not used
// 1 is 100k thermistor - best choice for EPCOS 100k (4.7k pullup)
// 2 is 200k thermistor - ATC Semitec 204GT-2 (4.7k pullup)
// 3 is mendel-parts thermistor (4.7k pullup)
// 4 is 10k thermistor !! do not use it for a hotend. It gives bad resolution at high temp. !!
// 5 is 100K thermistor - ATC Semitec 104GT-2 (Used in ParCan) (4.7k pullup)
// 6 is 100k EPCOS - Not as accurate as table 1 (created using a fluke thermocouple) (4.7k pullup)
// 7 is 100k Honeywell thermistor 135-104LAG-J01 (4.7k pullup)
// 71 is 100k Honeywell thermistor 135-104LAF-J01 (4.7k pullup)
// 8 is 100k 0603 SMD Vishay NTCS0603E3104FXT (4.7k pullup)
// 9 is 100k GE Sensing AL03006-58.2K-97-G1 (4.7k pullup)
// 10 is 100k RS thermistor 198-961 (4.7k pullup)
// 60 is 100k Maker's Tool Works Kapton Bed Thermister
//
// 1k ohm pullup tables - This is not normal, you would have to have changed out your 4.7k for 1k
// (but gives greater accuracy and more stable PID)
// 51 is 100k thermistor - EPCOS (1k pullup)
// 52 is 200k thermistor - ATC Semitec 204GT-2 (1k pullup)
// 55 is 100k thermistor - ATC Semitec 104GT-2 (Used in ParCan) (1k pullup)
#define TEMP_SENSOR_0 1
#define TEMP_SENSOR_1 0
#define TEMP_SENSOR_2 0
#define TEMP_SENSOR_BED 1
// This makes temp sensor 1 a redundant sensor for sensor 0. If the temperatures difference between these sensors is to high the print will be aborted.
//#define TEMP_SENSOR_1_AS_REDUNDANT
#define MAX_REDUNDANT_TEMP_SENSOR_DIFF 10
// Actual temperature must be close to target for this long before M109 returns success
#define TEMP_RESIDENCY_TIME 10 // (seconds)
#define TEMP_HYSTERESIS 3 // (degC) range of +/- temperatures considered "close" to the target one
#define TEMP_WINDOW 1 // (degC) Window around target to start the residency timer x degC early.
// The minimal temperature defines the temperature below which the heater will not be enabled It is used
// to check that the wiring to the thermistor is not broken.
// Otherwise this would lead to the heater being powered on all the time.
#define HEATER_0_MINTEMP 5
#define HEATER_1_MINTEMP 5
#define HEATER_2_MINTEMP 5
#define BED_MINTEMP 5
// When temperature exceeds max temp, your heater will be switched off.
// This feature exists to protect your hotend from overheating accidentally, but *NOT* from thermistor short/failure!
// You should use MINTEMP for thermistor short/failure protection.
#define HEATER_0_MAXTEMP 300
#define HEATER_1_MAXTEMP 260
#define HEATER_2_MAXTEMP 260
#define BED_MAXTEMP 150
// If your bed has low resistance e.g. .6 ohm and throws the fuse you can duty cycle it to reduce the
// average current. The value should be an integer and the heat bed will be turned on for 1 interval of
// HEATER_BED_DUTY_CYCLE_DIVIDER intervals.
//#define HEATER_BED_DUTY_CYCLE_DIVIDER 4
// PID settings:
// Comment the following line to disable PID and enable bang-bang.
#define PIDTEMP
#define BANG_MAX 255 // limits current to nozzle while in bang-bang mode; 255=full current
#define PID_MAX 255 // limits current to nozzle while PID is active (see PID_FUNCTIONAL_RANGE below); 255=full current
#ifdef PIDTEMP
//#define PID_DEBUG // Sends debug data to the serial port.
//#define PID_OPENLOOP 1 // Puts PID in open loop. M104/M140 sets the output power from 0 to PID_MAX
#define PID_FUNCTIONAL_RANGE 10 // If the temperature difference between the target temperature and the actual temperature
// is more then PID_FUNCTIONAL_RANGE then the PID will be shut off and the heater will be set to min/max.
#define PID_INTEGRAL_DRIVE_MAX 255 //limit for the integral term
#define K1 0.95 //smoothing factor within the PID
#define PID_dT ((16.0 * 8.0)/(F_CPU / 64.0 / 256.0)) //sampling period of the temperature routine
// If you are using a preconfigured hotend then you can use one of the value sets by uncommenting it
// Ultimaker
#define DEFAULT_Kp 22.2
#define DEFAULT_Ki 1.08
#define DEFAULT_Kd 114
// Makergear
// #define DEFAULT_Kp 7.0
// #define DEFAULT_Ki 0.1
// #define DEFAULT_Kd 12
// Mendel Parts V9 on 12V
// #define DEFAULT_Kp 63.0
// #define DEFAULT_Ki 2.25
// #define DEFAULT_Kd 440
#endif // PIDTEMP
// Bed Temperature Control
// Select PID or bang-bang with PIDTEMPBED. If bang-bang, BED_LIMIT_SWITCHING will enable hysteresis
//
// Uncomment this to enable PID on the bed. It uses the same frequency PWM as the extruder.
// If your PID_dT above is the default, and correct for your hardware/configuration, that means 7.689Hz,
// which is fine for driving a square wave into a resistive load and does not significantly impact you FET heating.
// This also works fine on a Fotek SSR-10DA Solid State Relay into a 250W heater.
// If your configuration is significantly different than this and you don't understand the issues involved, you probably
// shouldn't use bed PID until someone else verifies your hardware works.
// If this is enabled, find your own PID constants below.
//#define PIDTEMPBED
//
//#define BED_LIMIT_SWITCHING
// This sets the max power delivered to the bed, and replaces the HEATER_BED_DUTY_CYCLE_DIVIDER option.
// all forms of bed control obey this (PID, bang-bang, bang-bang with hysteresis)
// setting this to anything other than 255 enables a form of PWM to the bed just like HEATER_BED_DUTY_CYCLE_DIVIDER did,
// so you shouldn't use it unless you are OK with PWM on your bed. (see the comment on enabling PIDTEMPBED)
#define MAX_BED_POWER 255 // limits duty cycle to bed; 255=full current
#ifdef PIDTEMPBED
//120v 250W silicone heater into 4mm borosilicate (MendelMax 1.5+)
//from FOPDT model - kp=.39 Tp=405 Tdead=66, Tc set to 79.2, aggressive factor of .15 (vs .1, 1, 10)
#define DEFAULT_bedKp 10.00
#define DEFAULT_bedKi .023
#define DEFAULT_bedKd 305.4
//120v 250W silicone heater into 4mm borosilicate (MendelMax 1.5+)
//from pidautotune
// #define DEFAULT_bedKp 97.1
// #define DEFAULT_bedKi 1.41
// #define DEFAULT_bedKd 1675.16
// FIND YOUR OWN: "M303 E-1 C8 S90" to run autotune on the bed at 90 degreesC for 8 cycles.
#endif // PIDTEMPBED
//this prevents dangerous Extruder moves, i.e. if the temperature is under the limit
//can be software-disabled for whatever purposes by
#define PREVENT_DANGEROUS_EXTRUDE
//if PREVENT_DANGEROUS_EXTRUDE is on, you can still disable (uncomment) very long bits of extrusion separately.
#define PREVENT_LENGTHY_EXTRUDE
#define EXTRUDE_MINTEMP 170
#define EXTRUDE_MAXLENGTH (X_MAX_LENGTH+Y_MAX_LENGTH) //prevent extrusion of very large distances.
//===========================================================================
//=============================Mechanical Settings===========================
//===========================================================================
// Uncomment the following line to enable CoreXY kinematics
// #define COREXY
// coarse Endstop Settings
#define ENDSTOPPULLUPS // Comment this out (using // at the start of the line) to disable the endstop pullup resistors
#ifndef ENDSTOPPULLUPS
// fine Enstop settings: Individual Pullups. will be ignored if ENDSTOPPULLUPS is defined
// #define ENDSTOPPULLUP_XMAX
// #define ENDSTOPPULLUP_YMAX
// #define ENDSTOPPULLUP_ZMAX
// #define ENDSTOPPULLUP_XMIN
// #define ENDSTOPPULLUP_YMIN
// #define ENDSTOPPULLUP_ZMIN
#endif
#ifdef ENDSTOPPULLUPS
#define ENDSTOPPULLUP_XMAX
#define ENDSTOPPULLUP_YMAX
#define ENDSTOPPULLUP_ZMAX
#define ENDSTOPPULLUP_XMIN
#define ENDSTOPPULLUP_YMIN
#define ENDSTOPPULLUP_ZMIN
#endif
// The pullups are needed if you directly connect a mechanical endswitch between the signal and ground pins.
const bool X_MIN_ENDSTOP_INVERTING = true; // set to true to invert the logic of the endstop.
const bool Y_MIN_ENDSTOP_INVERTING = true; // set to true to invert the logic of the endstop.
const bool Z_MIN_ENDSTOP_INVERTING = false; // set to true to invert the logic of the endstop.
const bool X_MAX_ENDSTOP_INVERTING = true; // set to true to invert the logic of the endstop.
const bool Y_MAX_ENDSTOP_INVERTING = true; // set to true to invert the logic of the endstop.
const bool Z_MAX_ENDSTOP_INVERTING = true; // set to true to invert the logic of the endstop.
//#define DISABLE_MAX_ENDSTOPS
//#define DISABLE_MIN_ENDSTOPS
// Disable max endstops for compatibility with endstop checking routine
#if defined(COREXY) && !defined(DISABLE_MAX_ENDSTOPS)
#define DISABLE_MAX_ENDSTOPS
#endif
// For Inverting Stepper Enable Pins (Active Low) use 0, Non Inverting (Active High) use 1
#define X_ENABLE_ON 0
#define Y_ENABLE_ON 0
#define Z_ENABLE_ON 0
#define E_ENABLE_ON 0 // For all extruders
// Disables axis when it's not being used.
#define DISABLE_X false
#define DISABLE_Y false
#define DISABLE_Z false
#define DISABLE_E false // For all extruders
#define INVERT_X_DIR false // for Mendel set to false, for Orca set to true
#define INVERT_Y_DIR false // for Mendel set to true, for Orca set to false
#define INVERT_Z_DIR false // for Mendel set to false, for Orca set to true
#define INVERT_E0_DIR true // for direct drive extruder v9 set to true, for geared extruder set to false
#define INVERT_E1_DIR true // for direct drive extruder v9 set to true, for geared extruder set to false
#define INVERT_E2_DIR true // for direct drive extruder v9 set to true, for geared extruder set to false
// ENDSTOP SETTINGS:
// Sets direction of endstops when homing; 1=MAX, -1=MIN
#define X_HOME_DIR 1
#define Y_HOME_DIR 1
#define Z_HOME_DIR 1
#define min_software_endstops true // If true, axis won't move to coordinates less than HOME_POS.
#define max_software_endstops true // If true, axis won't move to coordinates greater than the defined lengths below.
// Travel limits after homing
#define X_MAX_POS 76
#define X_MIN_POS -76
#define Y_MAX_POS 76
#define Y_MIN_POS -76
#define Z_MAX_POS MANUAL_Z_HOME_POS
#define Z_MIN_POS 0
#define X_MAX_LENGTH (X_MAX_POS - X_MIN_POS)
#define Y_MAX_LENGTH (Y_MAX_POS - Y_MIN_POS)
#define Z_MAX_LENGTH (Z_MAX_POS - Z_MIN_POS)
// The position of the homing switches
#define MANUAL_HOME_POSITIONS // If defined, MANUAL_*_HOME_POS below will be used
#define BED_CENTER_AT_0_0 // If defined, the center of the bed is at (X=0, Y=0)
//Manual homing switch locations:
// For deltabots this means top and center of the cartesian print volume.
#define MANUAL_X_HOME_POS 0
#define MANUAL_Y_HOME_POS 0
#define MANUAL_Z_HOME_POS 253.9 // For delta: Distance between nozzle and print surface after homing.
#define AUTOLEVEL_GRID 20 // 26 Distance between autolevel Z probing points, should be less than print surface radius/3.
//// MOVEMENT SETTINGS
#define NUM_AXIS 4 // The axis order in all axis related arrays is X, Y, Z, E
#define HOMING_FEEDRATE {100*60, 100*60, 100*60, 0} // set the homing speeds (mm/min)
#define Z_RAISE_BETWEEN_PROBING=3
#define Z_PROBE_OFFSET {0, 12.5, -1.4, 0} // (0, 14, -6.5, 0) X, Y, Z, E distance between hotend nozzle and deployed bed leveling probe.(0,19,-8,0)
// default settings
#define DEFAULT_AXIS_STEPS_PER_UNIT {100/2.25, 100/2.25, 100/2.25, 100}
#define DEFAULT_MAX_FEEDRATE {300, 300, 300, 300} // (mm/sec)
#define DEFAULT_MAX_ACCELERATION {1000,1000,1000,1000} // X, Y, Z, E maximum start speed for accelerated moves. E default values are good for skeinforge 40+, for older versions raise them a lot.
#define DEFAULT_ACCELERATION 3000 // X, Y, Z and E max acceleration in mm/s^2 for printing moves
#define DEFAULT_RETRACT_ACCELERATION 3000 // X, Y, Z and E max acceleration in mm/s^2 for retracts
// Offset of the extruders (uncomment if using more than one and relying on firmware to position when changing).
// The offset has to be X=0, Y=0 for the extruder 0 hotend (default extruder).
// For the other hotends it is their distance from the extruder 0 hotend.
// #define EXTRUDER_OFFSET_X {0.0, 20.00} // (in mm) for each extruder, offset of the hotend on the X axis
// #define EXTRUDER_OFFSET_Y {0.0, 5.00} // (in mm) for each extruder, offset of the hotend on the Y axis
// The speed change that does not require acceleration (i.e. the software might assume it can be done instantaneously)
#define DEFAULT_XYJERK 20.0 // (mm/sec)
#define DEFAULT_ZJERK 20.0 // (mm/sec)
#define DEFAULT_EJERK 20.0 // (mm/sec)
//===========================================================================
//=============================Additional Features===========================
//===========================================================================
// EEPROM
// the microcontroller can store settings in the EEPROM, e.g. max velocity...
// M500 - stores paramters in EEPROM
// M501 - reads parameters from EEPROM (if you need reset them after you changed them temporarily).
// M502 - reverts to the default "factory settings". You still need to store them in EEPROM afterwards if you want to.
//define this to enable eeprom support
#define EEPROM_SETTINGS
//to disable EEPROM Serial responses and decrease program space by ~1700 byte: comment this out:
// please keep turned on if you can.
#define EEPROM_CHITCHAT
// Preheat Constants
#define PLA_PREHEAT_HOTEND_TEMP 210
#define PLA_PREHEAT_HPB_TEMP 40
#define PLA_PREHEAT_FAN_SPEED 255 // Insert Value between 0 and 255
#define ABS_PREHEAT_HOTEND_TEMP 230
#define ABS_PREHEAT_HPB_TEMP 80
#define ABS_PREHEAT_FAN_SPEED 255 // Insert Value between 0 and 255
//LCD and SD support
//#define ULTRA_LCD //general lcd support, also 16x2
//#define DOGLCD // Support for SPI LCD 128x64 (Controller ST7565R graphic Display Family)
#define SDSUPPORT // Enable SD Card Support in Hardware Console
//#define SDSLOW // Use slower SD transfer mode (not normally needed - uncomment if you're getting volume init error)
//#define ULTIMAKERCONTROLLER //as available from the ultimaker online store.
//#define ULTIPANEL //the ultipanel as on thingiverse
// The MaKr3d Makr-Panel with graphic controller and SD support
// [reprap.org]
//#define MAKRPANEL
// The RepRapDiscount Smart Controller (white PC
// [reprap.org]
#define REPRAP_DISCOUNT_SMART_CONTROLLER
// The GADGETS3D G3D LCD/SD Controller (blue PC
// [reprap.org]
//#define G3D_PANEL
// The RepRapDiscount FULL GRAPHIC Smart Controller (quadratic white PC
// [reprap.org]
//
// ==> REMEMBER TO INSTALL U8glib to your ARDUINO library folder: [code.google.com]
//#define REPRAP_DISCOUNT_FULL_GRAPHIC_SMART_CONTROLLER
// The RepRapWorld REPRAPWORLD_KEYPAD v1.1
// [reprapworld.com]
//#define REPRAPWORLD_KEYPAD
//#define REPRAPWORLD_KEYPAD_MOVE_STEP 10.0 // how much should be moved when a key is pressed, eg 10.0 means 10mm per click
// The Elefu RA Board Control Panel
// [www.elefu.com]
// REMEMBER TO INSTALL LiquidCrystal_I2C.h in your ARUDINO library folder: [github.com]
//#define RA_CONTROL_PANEL
//automatic expansion
#if defined (MAKRPANEL)
#define DOGLCD
#define SDSUPPORT
#define ULTIPANEL
#define NEWPANEL
#define DEFAULT_LCD_CONTRAST 17
#endif
#if defined (REPRAP_DISCOUNT_FULL_GRAPHIC_SMART_CONTROLLER)
#define DOGLCD
#define U8GLIB_ST7920
#define REPRAP_DISCOUNT_SMART_CONTROLLER
#endif
#if defined(ULTIMAKERCONTROLLER) || defined(REPRAP_DISCOUNT_SMART_CONTROLLER) || defined(G3D_PANEL)
#define ULTIPANEL
#define NEWPANEL
#endif
#if defined(REPRAPWORLD_KEYPAD)
#define NEWPANEL
#define ULTIPANEL
#endif
#if defined(RA_CONTROL_PANEL)
#define ULTIPANEL
#define NEWPANEL
#define LCD_I2C_TYPE_PCA8574
#define LCD_I2C_ADDRESS 0x27 // I2C Address of the port expander
#endif
//I2C PANELS
//#define LCD_I2C_SAINSMART_YWROBOT
#ifdef LCD_I2C_SAINSMART_YWROBOT
// This uses the LiquidCrystal_I2C library ( [bitbucket.org] )
// Make sure it is placed in the Arduino libraries directory.
#define LCD_I2C_TYPE_PCF8575
#define LCD_I2C_ADDRESS 0x27 // I2C Address of the port expander
#define NEWPANEL
#define ULTIPANEL
#endif
// PANELOLU2 LCD with status LEDs, separate encoder and click inputs
//#define LCD_I2C_PANELOLU2
#ifdef LCD_I2C_PANELOLU2
// This uses the LiquidTWI2 library v1.2.3 or later ( [github.com] )
// Make sure the LiquidTWI2 directory is placed in the Arduino or Sketchbook libraries subdirectory.
// (v1.2.3 no longer requires you to define PANELOLU in the LiquidTWI2.h library header file)
// Note: The PANELOLU2 encoder click input can either be directly connected to a pin
// (if BTN_ENC defined to != -1) or read through I2C (when BTN_ENC == -1).
#define LCD_I2C_TYPE_MCP23017
#define LCD_I2C_ADDRESS 0x20 // I2C Address of the port expander
#define LCD_USE_I2C_BUZZER //comment out to disable buzzer on LCD
#define NEWPANEL
#define ULTIPANEL
#endif
// Panucatt VIKI LCD with status LEDs, integrated click & L/R/U/P buttons, separate encoder inputs
//#define LCD_I2C_VIKI
#ifdef LCD_I2C_VIKI
// This uses the LiquidTWI2 library v1.2.3 or later ( [github.com] )
// Make sure the LiquidTWI2 directory is placed in the Arduino or Sketchbook libraries subdirectory.
// Note: The pause/stop/resume LCD button pin should be connected to the Arduino
// BTN_ENC pin (or set BTN_ENC to -1 if not used)
#define LCD_I2C_TYPE_MCP23017
#define LCD_I2C_ADDRESS 0x20 // I2C Address of the port expander
#define LCD_USE_I2C_BUZZER //comment out to disable buzzer on LCD (requires LiquidTWI2 v1.2.3 or later)
#define NEWPANEL
#define ULTIPANEL
#endif
#ifdef ULTIPANEL
// #define NEWPANEL //enable this if you have a click-encoder panel
#define SDSUPPORT
#define ULTRA_LCD
#ifdef DOGLCD // Change number of lines to match the DOG graphic display
#define LCD_WIDTH 20
#define LCD_HEIGHT 5
#else
#define LCD_WIDTH 20
#define LCD_HEIGHT 4
#endif
#else //no panel but just lcd
#ifdef ULTRA_LCD
#ifdef DOGLCD // Change number of lines to match the 128x64 graphics display
#define LCD_WIDTH 20
#define LCD_HEIGHT 5
#else
#define LCD_WIDTH 16
#define LCD_HEIGHT 2
#endif
#endif
#endif
// default LCD contrast for dogm-like LCD displays
#ifdef DOGLCD
# ifndef DEFAULT_LCD_CONTRAST
# define DEFAULT_LCD_CONTRAST 32
# endif
#endif
// Increase the FAN pwm frequency. Removes the PWM noise but increases heating in the FET/Arduino
//#define FAST_PWM_FAN
// Use software PWM to drive the fan, as for the heaters. This uses a very low frequency
// which is not ass annoying as with the hardware PWM. On the other hand, if this frequency
// is too low, you should also increment SOFT_PWM_SCALE.
//#define FAN_SOFT_PWM
// Incrementing this by 1 will double the software PWM frequency,
// affecting heaters, and the fan if FAN_SOFT_PWM is enabled.
// However, control resolution will be halved for each increment;
// at zero value, there are 128 effective control positions.
#define SOFT_PWM_SCALE 0
// M240 Triggers a camera by emulating a Canon RC-1 Remote
// Data from: [www.doc-diy.net]
// #define PHOTOGRAPH_PIN 23
// SF send wrong arc g-codes when using Arc Point as fillet procedure
//#define SF_ARC_FIX
// Support for the BariCUDA Paste Extruder.
//#define BARICUDA
/*********************************************************************\
* R/C SERVO support
* Sponsored by TrinityLabs, Reworked by codexmas
**********************************************************************/
// Number of servos
//
// If you select a configuration below, this will receive a default value and does not need to be set manually
// set it manually if you have more servos than extruders and wish to manually control some
// leaving it undefined or defining as 0 will disable the servo subsystem
// If unsure, leave commented / disabled
//
#define NUM_SERVOS 1 // Servo index starts with 0 for M280 command
// Servo Endstops
//
// This allows for servo actuated endstops, primary usage is for the Z Axis to eliminate calibration or bed height changes.
// Use M206 command to correct for switch height offset to actual nozzle height. Store that setting with M500.
//
//#define SERVO_ENDSTOPS {-1, -1, 0} // Servo index for X, Y, Z. Disable with -1
#define SERVO_ENDSTOP_ANGLES {0,0, 0,0, 5,120} // X,Y,Z Axis Extend and Retract angles
#include "Configuration_adv.h"
#include "thermistortables.h"
#endif //__CONFIGURATION_H
#define CONFIGURATION_H
// This configuration file contains the basic settings.
// Advanced settings can be found in Configuration_adv.h
// BASIC SETTINGS: select your board type, temperature sensor type, axis scaling, and endstop configuration
// User-specified version info of this build to display in [Pronterface, etc] terminal window during
// startup. Implementation of an idea by Prof Braino to inform user that any changes made to this
// build by the user have been successfully uploaded into firmware.
#define STRING_VERSION_CONFIG_H __DATE__ " " __TIME__ // build date and time
#define STRING_CONFIG_H_AUTHOR "(FOLGERTECH, Kossel by MAKERFRONT)" // Who made the changes. ("Blomker" only edited the parametric values in the sketch. Author name is maintain as jcrocholl to indicate source of this sketch, and credit to where it is due)
// SERIAL_PORT selects which serial port should be used for communication with the host.
// This allows the connection of wireless adapters (for instance) to non-default port pins.
// Serial port 0 is still used by the Arduino bootloader regardless of this setting.
#define SERIAL_PORT 0
// This determines the communication speed of the printer
#define BAUDRATE 250000
//#define BAUDRATE 115200
//// The following define selects which electronics board you have. Please choose the one that matches your setup
// 10 = Gen7 custom (Alfons3 Version) "https://github.com/Alfons3/Generation_7_Electronics"
// 11 = Gen7 v1.1, v1.2 = 11
// 12 = Gen7 v1.3
// 13 = Gen7 v1.4
// 3 = MEGA/RAMPS up to 1.2 = 3
// 33 = RAMPS 1.3 / 1.4 (Power outputs: Extruder, Fan, Bed)
// 34 = RAMPS 1.3 / 1.4 (Power outputs: Extruder0, Extruder1, Bed)
// 35 = RAMPS 1.3 / 1.4 (Power outputs: Extruder, Fan, Fan)
// 4 = Duemilanove w/ ATMega328P pin assignment
// 5 = Gen6
// 51 = Gen6 deluxe
// 6 = Sanguinololu < 1.2
// 62 = Sanguinololu 1.2 and above
// 63 = Melzi
// 64 = STB V1.1
// 65 = Azteeg X1
// 66 = Melzi with ATmega1284 (MaKr3d version)
// 7 = Ultimaker
// 71 = Ultimaker (Older electronics. Pre 1.5.4. This is rare)
// 77 = 3Drag Controller
// 8 = Teensylu
// 80 = Rumba
// 81 = Printrboard (AT90USB1286)
// 82 = Brainwave (AT90USB646)
// 9 = Gen3+
// 70 = Megatronics
// 701= Megatronics v2.0
// 702= Minitronics v1.0
// 90 = Alpha OMCA board
// 91 = Final OMCA board
// 301 = Rambo
// 21 = Elefu Ra Board (v3)
#ifndef MOTHERBOARD
#define MOTHERBOARD 33
#endif
#define REPRAP_DISCOUNT_FULL_GRAPHIC_SMART_CONTROLLER
#include
// Define this to set a custom name for your generic Mendel,
#define CUSTOM_MENDEL_NAME "This Mendel"
// This defines the number of extruders
#define EXTRUDERS 1
//// The following define selects which power supply you have. Please choose the one that matches your setup
// 1 = ATX
// 2 = X-Box 360 203Watts (the blue wire connected to PS_ON and the red wire to VCC)
#define POWER_SUPPLY 1
//===========================================================================
//============================== Delta Settings =============================
//===========================================================================
// Enable DELTA kinematics
#define DELTA
// Make delta curves from many straight lines (linear interpolation).
// This is a trade-off between visible corners (not enough segments)
// and processor overload (too many expensive sqrt calls).
#define DELTA_SEGMENTS_PER_SECOND 200
// Center-to-center distance of the holes in the diagonal push rods.
#define DELTA_DIAGONAL_ROD 230 // mm (215)
// Horizontal offset from middle of printer to smooth rod center.
#define DELTA_SMOOTH_ROD_OFFSET 178 // mm (137.0)
// Horizontal offset of the universal joints on the end effector.
#define DELTA_EFFECTOR_OFFSET 25 // mm (19.9)
// Horizontal offset of the universal joints on the carriages.
#define DELTA_CARRIAGE_OFFSET 12.0 // mm (19.5)
// Effective horizontal distance bridged by diagonal push rods.
#define DELTA_RADIUS (DELTA_SMOOTH_ROD_OFFSET-DELTA_EFFECTOR_OFFSET-DELTA_CARRIAGE_OFFSET)
// Effective X/Y positions of the three vertical towers.
#define SIN_60 0.8660254037844386
#define COS_60 0.5
#define DELTA_TOWER1_X -SIN_60*DELTA_RADIUS // front left tower
#define DELTA_TOWER1_Y -COS_60*DELTA_RADIUS
#define DELTA_TOWER2_X SIN_60*DELTA_RADIUS // front right tower
#define DELTA_TOWER2_Y -COS_60*DELTA_RADIUS
#define DELTA_TOWER3_X 0.0 // back middle tower
#define DELTA_TOWER3_Y DELTA_RADIUS
// Diagonal rod squared
#define DELTA_DIAGONAL_ROD_2 pow(DELTA_DIAGONAL_ROD,2)
//===========================================================================
//=============================Thermal Settings ============================
//===========================================================================
//
//--NORMAL IS 4.7kohm PULLUP!-- 1kohm pullup can be used on hotend sensor, using correct resistor and table
//
//// Temperature sensor settings:
// -2 is thermocouple with MAX6675 (only for sensor 0)
// -1 is thermocouple with AD595
// 0 is not used
// 1 is 100k thermistor - best choice for EPCOS 100k (4.7k pullup)
// 2 is 200k thermistor - ATC Semitec 204GT-2 (4.7k pullup)
// 3 is mendel-parts thermistor (4.7k pullup)
// 4 is 10k thermistor !! do not use it for a hotend. It gives bad resolution at high temp. !!
// 5 is 100K thermistor - ATC Semitec 104GT-2 (Used in ParCan) (4.7k pullup)
// 6 is 100k EPCOS - Not as accurate as table 1 (created using a fluke thermocouple) (4.7k pullup)
// 7 is 100k Honeywell thermistor 135-104LAG-J01 (4.7k pullup)
// 71 is 100k Honeywell thermistor 135-104LAF-J01 (4.7k pullup)
// 8 is 100k 0603 SMD Vishay NTCS0603E3104FXT (4.7k pullup)
// 9 is 100k GE Sensing AL03006-58.2K-97-G1 (4.7k pullup)
// 10 is 100k RS thermistor 198-961 (4.7k pullup)
// 60 is 100k Maker's Tool Works Kapton Bed Thermister
//
// 1k ohm pullup tables - This is not normal, you would have to have changed out your 4.7k for 1k
// (but gives greater accuracy and more stable PID)
// 51 is 100k thermistor - EPCOS (1k pullup)
// 52 is 200k thermistor - ATC Semitec 204GT-2 (1k pullup)
// 55 is 100k thermistor - ATC Semitec 104GT-2 (Used in ParCan) (1k pullup)
#define TEMP_SENSOR_0 1
#define TEMP_SENSOR_1 0
#define TEMP_SENSOR_2 0
#define TEMP_SENSOR_BED 1
// This makes temp sensor 1 a redundant sensor for sensor 0. If the temperatures difference between these sensors is to high the print will be aborted.
//#define TEMP_SENSOR_1_AS_REDUNDANT
#define MAX_REDUNDANT_TEMP_SENSOR_DIFF 10
// Actual temperature must be close to target for this long before M109 returns success
#define TEMP_RESIDENCY_TIME 10 // (seconds)
#define TEMP_HYSTERESIS 3 // (degC) range of +/- temperatures considered "close" to the target one
#define TEMP_WINDOW 1 // (degC) Window around target to start the residency timer x degC early.
// The minimal temperature defines the temperature below which the heater will not be enabled It is used
// to check that the wiring to the thermistor is not broken.
// Otherwise this would lead to the heater being powered on all the time.
#define HEATER_0_MINTEMP 5
#define HEATER_1_MINTEMP 5
#define HEATER_2_MINTEMP 5
#define BED_MINTEMP 5
// When temperature exceeds max temp, your heater will be switched off.
// This feature exists to protect your hotend from overheating accidentally, but *NOT* from thermistor short/failure!
// You should use MINTEMP for thermistor short/failure protection.
#define HEATER_0_MAXTEMP 300
#define HEATER_1_MAXTEMP 260
#define HEATER_2_MAXTEMP 260
#define BED_MAXTEMP 150
// If your bed has low resistance e.g. .6 ohm and throws the fuse you can duty cycle it to reduce the
// average current. The value should be an integer and the heat bed will be turned on for 1 interval of
// HEATER_BED_DUTY_CYCLE_DIVIDER intervals.
//#define HEATER_BED_DUTY_CYCLE_DIVIDER 4
// PID settings:
// Comment the following line to disable PID and enable bang-bang.
#define PIDTEMP
#define BANG_MAX 255 // limits current to nozzle while in bang-bang mode; 255=full current
#define PID_MAX 255 // limits current to nozzle while PID is active (see PID_FUNCTIONAL_RANGE below); 255=full current
#ifdef PIDTEMP
//#define PID_DEBUG // Sends debug data to the serial port.
//#define PID_OPENLOOP 1 // Puts PID in open loop. M104/M140 sets the output power from 0 to PID_MAX
#define PID_FUNCTIONAL_RANGE 10 // If the temperature difference between the target temperature and the actual temperature
// is more then PID_FUNCTIONAL_RANGE then the PID will be shut off and the heater will be set to min/max.
#define PID_INTEGRAL_DRIVE_MAX 255 //limit for the integral term
#define K1 0.95 //smoothing factor within the PID
#define PID_dT ((16.0 * 8.0)/(F_CPU / 64.0 / 256.0)) //sampling period of the temperature routine
// If you are using a preconfigured hotend then you can use one of the value sets by uncommenting it
// Ultimaker
#define DEFAULT_Kp 22.2
#define DEFAULT_Ki 1.08
#define DEFAULT_Kd 114
// Makergear
// #define DEFAULT_Kp 7.0
// #define DEFAULT_Ki 0.1
// #define DEFAULT_Kd 12
// Mendel Parts V9 on 12V
// #define DEFAULT_Kp 63.0
// #define DEFAULT_Ki 2.25
// #define DEFAULT_Kd 440
#endif // PIDTEMP
// Bed Temperature Control
// Select PID or bang-bang with PIDTEMPBED. If bang-bang, BED_LIMIT_SWITCHING will enable hysteresis
//
// Uncomment this to enable PID on the bed. It uses the same frequency PWM as the extruder.
// If your PID_dT above is the default, and correct for your hardware/configuration, that means 7.689Hz,
// which is fine for driving a square wave into a resistive load and does not significantly impact you FET heating.
// This also works fine on a Fotek SSR-10DA Solid State Relay into a 250W heater.
// If your configuration is significantly different than this and you don't understand the issues involved, you probably
// shouldn't use bed PID until someone else verifies your hardware works.
// If this is enabled, find your own PID constants below.
//#define PIDTEMPBED
//
//#define BED_LIMIT_SWITCHING
// This sets the max power delivered to the bed, and replaces the HEATER_BED_DUTY_CYCLE_DIVIDER option.
// all forms of bed control obey this (PID, bang-bang, bang-bang with hysteresis)
// setting this to anything other than 255 enables a form of PWM to the bed just like HEATER_BED_DUTY_CYCLE_DIVIDER did,
// so you shouldn't use it unless you are OK with PWM on your bed. (see the comment on enabling PIDTEMPBED)
#define MAX_BED_POWER 255 // limits duty cycle to bed; 255=full current
#ifdef PIDTEMPBED
//120v 250W silicone heater into 4mm borosilicate (MendelMax 1.5+)
//from FOPDT model - kp=.39 Tp=405 Tdead=66, Tc set to 79.2, aggressive factor of .15 (vs .1, 1, 10)
#define DEFAULT_bedKp 10.00
#define DEFAULT_bedKi .023
#define DEFAULT_bedKd 305.4
//120v 250W silicone heater into 4mm borosilicate (MendelMax 1.5+)
//from pidautotune
// #define DEFAULT_bedKp 97.1
// #define DEFAULT_bedKi 1.41
// #define DEFAULT_bedKd 1675.16
// FIND YOUR OWN: "M303 E-1 C8 S90" to run autotune on the bed at 90 degreesC for 8 cycles.
#endif // PIDTEMPBED
//this prevents dangerous Extruder moves, i.e. if the temperature is under the limit
//can be software-disabled for whatever purposes by
#define PREVENT_DANGEROUS_EXTRUDE
//if PREVENT_DANGEROUS_EXTRUDE is on, you can still disable (uncomment) very long bits of extrusion separately.
#define PREVENT_LENGTHY_EXTRUDE
#define EXTRUDE_MINTEMP 170
#define EXTRUDE_MAXLENGTH (X_MAX_LENGTH+Y_MAX_LENGTH) //prevent extrusion of very large distances.
//===========================================================================
//=============================Mechanical Settings===========================
//===========================================================================
// Uncomment the following line to enable CoreXY kinematics
// #define COREXY
// coarse Endstop Settings
#define ENDSTOPPULLUPS // Comment this out (using // at the start of the line) to disable the endstop pullup resistors
#ifndef ENDSTOPPULLUPS
// fine Enstop settings: Individual Pullups. will be ignored if ENDSTOPPULLUPS is defined
// #define ENDSTOPPULLUP_XMAX
// #define ENDSTOPPULLUP_YMAX
// #define ENDSTOPPULLUP_ZMAX
// #define ENDSTOPPULLUP_XMIN
// #define ENDSTOPPULLUP_YMIN
// #define ENDSTOPPULLUP_ZMIN
#endif
#ifdef ENDSTOPPULLUPS
#define ENDSTOPPULLUP_XMAX
#define ENDSTOPPULLUP_YMAX
#define ENDSTOPPULLUP_ZMAX
#define ENDSTOPPULLUP_XMIN
#define ENDSTOPPULLUP_YMIN
#define ENDSTOPPULLUP_ZMIN
#endif
// The pullups are needed if you directly connect a mechanical endswitch between the signal and ground pins.
const bool X_MIN_ENDSTOP_INVERTING = true; // set to true to invert the logic of the endstop.
const bool Y_MIN_ENDSTOP_INVERTING = true; // set to true to invert the logic of the endstop.
const bool Z_MIN_ENDSTOP_INVERTING = false; // set to true to invert the logic of the endstop.
const bool X_MAX_ENDSTOP_INVERTING = true; // set to true to invert the logic of the endstop.
const bool Y_MAX_ENDSTOP_INVERTING = true; // set to true to invert the logic of the endstop.
const bool Z_MAX_ENDSTOP_INVERTING = true; // set to true to invert the logic of the endstop.
//#define DISABLE_MAX_ENDSTOPS
//#define DISABLE_MIN_ENDSTOPS
// Disable max endstops for compatibility with endstop checking routine
#if defined(COREXY) && !defined(DISABLE_MAX_ENDSTOPS)
#define DISABLE_MAX_ENDSTOPS
#endif
// For Inverting Stepper Enable Pins (Active Low) use 0, Non Inverting (Active High) use 1
#define X_ENABLE_ON 0
#define Y_ENABLE_ON 0
#define Z_ENABLE_ON 0
#define E_ENABLE_ON 0 // For all extruders
// Disables axis when it's not being used.
#define DISABLE_X false
#define DISABLE_Y false
#define DISABLE_Z false
#define DISABLE_E false // For all extruders
#define INVERT_X_DIR false // for Mendel set to false, for Orca set to true
#define INVERT_Y_DIR false // for Mendel set to true, for Orca set to false
#define INVERT_Z_DIR false // for Mendel set to false, for Orca set to true
#define INVERT_E0_DIR true // for direct drive extruder v9 set to true, for geared extruder set to false
#define INVERT_E1_DIR true // for direct drive extruder v9 set to true, for geared extruder set to false
#define INVERT_E2_DIR true // for direct drive extruder v9 set to true, for geared extruder set to false
// ENDSTOP SETTINGS:
// Sets direction of endstops when homing; 1=MAX, -1=MIN
#define X_HOME_DIR 1
#define Y_HOME_DIR 1
#define Z_HOME_DIR 1
#define min_software_endstops true // If true, axis won't move to coordinates less than HOME_POS.
#define max_software_endstops true // If true, axis won't move to coordinates greater than the defined lengths below.
// Travel limits after homing
#define X_MAX_POS 76
#define X_MIN_POS -76
#define Y_MAX_POS 76
#define Y_MIN_POS -76
#define Z_MAX_POS MANUAL_Z_HOME_POS
#define Z_MIN_POS 0
#define X_MAX_LENGTH (X_MAX_POS - X_MIN_POS)
#define Y_MAX_LENGTH (Y_MAX_POS - Y_MIN_POS)
#define Z_MAX_LENGTH (Z_MAX_POS - Z_MIN_POS)
// The position of the homing switches
#define MANUAL_HOME_POSITIONS // If defined, MANUAL_*_HOME_POS below will be used
#define BED_CENTER_AT_0_0 // If defined, the center of the bed is at (X=0, Y=0)
//Manual homing switch locations:
// For deltabots this means top and center of the cartesian print volume.
#define MANUAL_X_HOME_POS 0
#define MANUAL_Y_HOME_POS 0
#define MANUAL_Z_HOME_POS 253.9 // For delta: Distance between nozzle and print surface after homing.
#define AUTOLEVEL_GRID 20 // 26 Distance between autolevel Z probing points, should be less than print surface radius/3.
//// MOVEMENT SETTINGS
#define NUM_AXIS 4 // The axis order in all axis related arrays is X, Y, Z, E
#define HOMING_FEEDRATE {100*60, 100*60, 100*60, 0} // set the homing speeds (mm/min)
#define Z_RAISE_BETWEEN_PROBING=3
#define Z_PROBE_OFFSET {0, 12.5, -1.4, 0} // (0, 14, -6.5, 0) X, Y, Z, E distance between hotend nozzle and deployed bed leveling probe.(0,19,-8,0)
// default settings
#define DEFAULT_AXIS_STEPS_PER_UNIT {100/2.25, 100/2.25, 100/2.25, 100}
#define DEFAULT_MAX_FEEDRATE {300, 300, 300, 300} // (mm/sec)
#define DEFAULT_MAX_ACCELERATION {1000,1000,1000,1000} // X, Y, Z, E maximum start speed for accelerated moves. E default values are good for skeinforge 40+, for older versions raise them a lot.
#define DEFAULT_ACCELERATION 3000 // X, Y, Z and E max acceleration in mm/s^2 for printing moves
#define DEFAULT_RETRACT_ACCELERATION 3000 // X, Y, Z and E max acceleration in mm/s^2 for retracts
// Offset of the extruders (uncomment if using more than one and relying on firmware to position when changing).
// The offset has to be X=0, Y=0 for the extruder 0 hotend (default extruder).
// For the other hotends it is their distance from the extruder 0 hotend.
// #define EXTRUDER_OFFSET_X {0.0, 20.00} // (in mm) for each extruder, offset of the hotend on the X axis
// #define EXTRUDER_OFFSET_Y {0.0, 5.00} // (in mm) for each extruder, offset of the hotend on the Y axis
// The speed change that does not require acceleration (i.e. the software might assume it can be done instantaneously)
#define DEFAULT_XYJERK 20.0 // (mm/sec)
#define DEFAULT_ZJERK 20.0 // (mm/sec)
#define DEFAULT_EJERK 20.0 // (mm/sec)
//===========================================================================
//=============================Additional Features===========================
//===========================================================================
// EEPROM
// the microcontroller can store settings in the EEPROM, e.g. max velocity...
// M500 - stores paramters in EEPROM
// M501 - reads parameters from EEPROM (if you need reset them after you changed them temporarily).
// M502 - reverts to the default "factory settings". You still need to store them in EEPROM afterwards if you want to.
//define this to enable eeprom support
#define EEPROM_SETTINGS
//to disable EEPROM Serial responses and decrease program space by ~1700 byte: comment this out:
// please keep turned on if you can.
#define EEPROM_CHITCHAT
// Preheat Constants
#define PLA_PREHEAT_HOTEND_TEMP 210
#define PLA_PREHEAT_HPB_TEMP 40
#define PLA_PREHEAT_FAN_SPEED 255 // Insert Value between 0 and 255
#define ABS_PREHEAT_HOTEND_TEMP 230
#define ABS_PREHEAT_HPB_TEMP 80
#define ABS_PREHEAT_FAN_SPEED 255 // Insert Value between 0 and 255
//LCD and SD support
//#define ULTRA_LCD //general lcd support, also 16x2
//#define DOGLCD // Support for SPI LCD 128x64 (Controller ST7565R graphic Display Family)
#define SDSUPPORT // Enable SD Card Support in Hardware Console
//#define SDSLOW // Use slower SD transfer mode (not normally needed - uncomment if you're getting volume init error)
//#define ULTIMAKERCONTROLLER //as available from the ultimaker online store.
//#define ULTIPANEL //the ultipanel as on thingiverse
// The MaKr3d Makr-Panel with graphic controller and SD support
// [reprap.org]
//#define MAKRPANEL
// The RepRapDiscount Smart Controller (white PC
// [reprap.org]
#define REPRAP_DISCOUNT_SMART_CONTROLLER
// The GADGETS3D G3D LCD/SD Controller (blue PC
// [reprap.org]
//#define G3D_PANEL
// The RepRapDiscount FULL GRAPHIC Smart Controller (quadratic white PC
// [reprap.org]
//
// ==> REMEMBER TO INSTALL U8glib to your ARDUINO library folder: [code.google.com]
//#define REPRAP_DISCOUNT_FULL_GRAPHIC_SMART_CONTROLLER
// The RepRapWorld REPRAPWORLD_KEYPAD v1.1
// [reprapworld.com]
//#define REPRAPWORLD_KEYPAD
//#define REPRAPWORLD_KEYPAD_MOVE_STEP 10.0 // how much should be moved when a key is pressed, eg 10.0 means 10mm per click
// The Elefu RA Board Control Panel
// [www.elefu.com]
// REMEMBER TO INSTALL LiquidCrystal_I2C.h in your ARUDINO library folder: [github.com]
//#define RA_CONTROL_PANEL
//automatic expansion
#if defined (MAKRPANEL)
#define DOGLCD
#define SDSUPPORT
#define ULTIPANEL
#define NEWPANEL
#define DEFAULT_LCD_CONTRAST 17
#endif
#if defined (REPRAP_DISCOUNT_FULL_GRAPHIC_SMART_CONTROLLER)
#define DOGLCD
#define U8GLIB_ST7920
#define REPRAP_DISCOUNT_SMART_CONTROLLER
#endif
#if defined(ULTIMAKERCONTROLLER) || defined(REPRAP_DISCOUNT_SMART_CONTROLLER) || defined(G3D_PANEL)
#define ULTIPANEL
#define NEWPANEL
#endif
#if defined(REPRAPWORLD_KEYPAD)
#define NEWPANEL
#define ULTIPANEL
#endif
#if defined(RA_CONTROL_PANEL)
#define ULTIPANEL
#define NEWPANEL
#define LCD_I2C_TYPE_PCA8574
#define LCD_I2C_ADDRESS 0x27 // I2C Address of the port expander
#endif
//I2C PANELS
//#define LCD_I2C_SAINSMART_YWROBOT
#ifdef LCD_I2C_SAINSMART_YWROBOT
// This uses the LiquidCrystal_I2C library ( [bitbucket.org] )
// Make sure it is placed in the Arduino libraries directory.
#define LCD_I2C_TYPE_PCF8575
#define LCD_I2C_ADDRESS 0x27 // I2C Address of the port expander
#define NEWPANEL
#define ULTIPANEL
#endif
// PANELOLU2 LCD with status LEDs, separate encoder and click inputs
//#define LCD_I2C_PANELOLU2
#ifdef LCD_I2C_PANELOLU2
// This uses the LiquidTWI2 library v1.2.3 or later ( [github.com] )
// Make sure the LiquidTWI2 directory is placed in the Arduino or Sketchbook libraries subdirectory.
// (v1.2.3 no longer requires you to define PANELOLU in the LiquidTWI2.h library header file)
// Note: The PANELOLU2 encoder click input can either be directly connected to a pin
// (if BTN_ENC defined to != -1) or read through I2C (when BTN_ENC == -1).
#define LCD_I2C_TYPE_MCP23017
#define LCD_I2C_ADDRESS 0x20 // I2C Address of the port expander
#define LCD_USE_I2C_BUZZER //comment out to disable buzzer on LCD
#define NEWPANEL
#define ULTIPANEL
#endif
// Panucatt VIKI LCD with status LEDs, integrated click & L/R/U/P buttons, separate encoder inputs
//#define LCD_I2C_VIKI
#ifdef LCD_I2C_VIKI
// This uses the LiquidTWI2 library v1.2.3 or later ( [github.com] )
// Make sure the LiquidTWI2 directory is placed in the Arduino or Sketchbook libraries subdirectory.
// Note: The pause/stop/resume LCD button pin should be connected to the Arduino
// BTN_ENC pin (or set BTN_ENC to -1 if not used)
#define LCD_I2C_TYPE_MCP23017
#define LCD_I2C_ADDRESS 0x20 // I2C Address of the port expander
#define LCD_USE_I2C_BUZZER //comment out to disable buzzer on LCD (requires LiquidTWI2 v1.2.3 or later)
#define NEWPANEL
#define ULTIPANEL
#endif
#ifdef ULTIPANEL
// #define NEWPANEL //enable this if you have a click-encoder panel
#define SDSUPPORT
#define ULTRA_LCD
#ifdef DOGLCD // Change number of lines to match the DOG graphic display
#define LCD_WIDTH 20
#define LCD_HEIGHT 5
#else
#define LCD_WIDTH 20
#define LCD_HEIGHT 4
#endif
#else //no panel but just lcd
#ifdef ULTRA_LCD
#ifdef DOGLCD // Change number of lines to match the 128x64 graphics display
#define LCD_WIDTH 20
#define LCD_HEIGHT 5
#else
#define LCD_WIDTH 16
#define LCD_HEIGHT 2
#endif
#endif
#endif
// default LCD contrast for dogm-like LCD displays
#ifdef DOGLCD
# ifndef DEFAULT_LCD_CONTRAST
# define DEFAULT_LCD_CONTRAST 32
# endif
#endif
// Increase the FAN pwm frequency. Removes the PWM noise but increases heating in the FET/Arduino
//#define FAST_PWM_FAN
// Use software PWM to drive the fan, as for the heaters. This uses a very low frequency
// which is not ass annoying as with the hardware PWM. On the other hand, if this frequency
// is too low, you should also increment SOFT_PWM_SCALE.
//#define FAN_SOFT_PWM
// Incrementing this by 1 will double the software PWM frequency,
// affecting heaters, and the fan if FAN_SOFT_PWM is enabled.
// However, control resolution will be halved for each increment;
// at zero value, there are 128 effective control positions.
#define SOFT_PWM_SCALE 0
// M240 Triggers a camera by emulating a Canon RC-1 Remote
// Data from: [www.doc-diy.net]
// #define PHOTOGRAPH_PIN 23
// SF send wrong arc g-codes when using Arc Point as fillet procedure
//#define SF_ARC_FIX
// Support for the BariCUDA Paste Extruder.
//#define BARICUDA
/*********************************************************************\
* R/C SERVO support
* Sponsored by TrinityLabs, Reworked by codexmas
**********************************************************************/
// Number of servos
//
// If you select a configuration below, this will receive a default value and does not need to be set manually
// set it manually if you have more servos than extruders and wish to manually control some
// leaving it undefined or defining as 0 will disable the servo subsystem
// If unsure, leave commented / disabled
//
#define NUM_SERVOS 1 // Servo index starts with 0 for M280 command
// Servo Endstops
//
// This allows for servo actuated endstops, primary usage is for the Z Axis to eliminate calibration or bed height changes.
// Use M206 command to correct for switch height offset to actual nozzle height. Store that setting with M500.
//
//#define SERVO_ENDSTOPS {-1, -1, 0} // Servo index for X, Y, Z. Disable with -1
#define SERVO_ENDSTOP_ANGLES {0,0, 0,0, 5,120} // X,Y,Z Axis Extend and Retract angles
#include "Configuration_adv.h"
#include "thermistortables.h"
#endif //__CONFIGURATION_H
|
Re: Hat jemand Full Graphic Smart LCD Controller von reprapdiscount am laufen? 26. March 2015 20:37 |
Registrierungsdatum: 9 Jahre zuvor Beiträge: 21 |
|
Re: Hat jemand Full Graphic Smart LCD Controller von reprapdiscount am laufen? 26. March 2015 20:46 |
Registrierungsdatum: 9 Jahre zuvor Beiträge: 21 |
.......hier ist Fehler.....
****************************************
,#include "Marlin.h"
#include "cardreader.h"
#include "ultralcd.h"
#include "stepper.h"
#include "temperature.h"
#include "language.h"
#ifdef SDSUPPORT
CardReader::CardReader()
{
filesize = 0;
sdpos = 0;
sdprinting = false;
cardOK = false;
saving = false;
logging = false;
autostart_atmillis=0;
workDirDepth = 0;
memset(workDirParents, 0, sizeof(workDirParents));
autostart_stilltocheck=true; //the sd start is delayed, because otherwise the serial cannot answer fast enought to make contact with the hostsoftware.
lastnr=0;
//power to SD reader
#if SDPOWER > -1
SET_OUTPUT(SDPOWER);
WRITE(SDPOWER,HIGH);
#endif //SDPOWER
autostart_atmillis=millis()+5000;
}
char *createFilename(char *buffer,const dir_t &p) //buffer>12characters
{
char *pos=buffer;
for (uint8_t i = 0; i < 11; i++)
{
if (p.name == ' ')continue;
if (i == 8)
{
*pos++='.';
}
*pos++=p.name;
}
*pos++=0;
return buffer;
}
void CardReader::lsDive(const char *prepend,SdFile parent)
{
dir_t p;
uint8_t cnt=0;
while (parent.readDir(p, longFilename) > 0)
{
if( DIR_IS_SUBDIR(&p) && lsAction!=LS_Count && lsAction!=LS_GetFilename) // hence LS_SerialPrint
{
char path[13*2];
char lfilename[13];
createFilename(lfilename,p);
path[0]=0;
if(strlen(prepend)==0) //avoid leading / if already in prepend
{
strcat(path,"/");
}
strcat(path,prepend);
strcat(path,lfilename);
strcat(path,"/");
//Serial.print(path);
SdFile dir;
if(!dir.open(parent,lfilename, O_READ))
{
if(lsAction==LS_SerialPrint)
{
SERIAL_ECHO_START;
SERIAL_ECHOLN(MSG_SD_CANT_OPEN_SUBDIR);
SERIAL_ECHOLN(lfilename);
}
}
lsDive(path,dir);
//close done automatically by destructor of SdFile
}
else
{
if (p.name[0] == DIR_NAME_FREE) break;
if (p.name[0] == DIR_NAME_DELETED || p.name[0] == '.'|| p.name[0] == '_') continue;
if (longFilename[0] != '\0' &&
(longFilename[0] == '.' || longFilename[0] == '_')) continue;
if ( p.name[0] == '.')
{
if ( p.name[1] != '.')
continue;
}
if (!DIR_IS_FILE_OR_SUBDIR(&p)) continue;
filenameIsDir=DIR_IS_SUBDIR(&p);
if(!filenameIsDir)
{
if(p.name[8]!='G') continue;
if(p.name[9]=='~') continue;
}
//if(cnt++!=nr) continue;
createFilename(filename,p);
if(lsAction==LS_SerialPrint)
{
SERIAL_PROTOCOL(prepend);
SERIAL_PROTOCOLLN(filename);
}
else if(lsAction==LS_Count)
{
nrFiles++;
}
else if(lsAction==LS_GetFilename)
{
if(cnt==nrFiles)
return;
cnt++;
}
}
}
}
void CardReader::ls()
{
lsAction=LS_SerialPrint;
if(lsAction==LS_Count)
nrFiles=0;
root.rewind();
lsDive("",root);
}
void CardReader::initsd()
{
cardOK = false;
if(root.isOpen())
root.close();
#ifdef SDSLOW
if (!card.init(SPI_HALF_SPEED,SDSS))
#else
if (!card.init(SPI_FULL_SPEED,SDSS))
#endif
{
//if (!card.init(SPI_HALF_SPEED,SDSS))
SERIAL_ECHO_START;
SERIAL_ECHOLNPGM(MSG_SD_INIT_FAIL);
}
else if (!volume.init(&card))
{
SERIAL_ERROR_START;
SERIAL_ERRORLNPGM(MSG_SD_VOL_INIT_FAIL);
}
else if (!root.openRoot(&volume))
{
SERIAL_ERROR_START;
SERIAL_ERRORLNPGM(MSG_SD_OPENROOT_FAIL);
}
else
{
cardOK = true;
SERIAL_ECHO_START;
SERIAL_ECHOLNPGM(MSG_SD_CARD_OK);
}
workDir=root;
curDir=&root;
/*
if(!workDir.openRoot(&volume))
{
SERIAL_ECHOLNPGM(MSG_SD_WORKDIR_FAIL);
}
*/
}
void CardReader::setroot()
{
/*if(!workDir.openRoot(&volume))
{
SERIAL_ECHOLNPGM(MSG_SD_WORKDIR_FAIL);
}*/
workDir=root;
curDir=&workDir;
}
void CardReader::release()
{
sdprinting = false;
cardOK = false;
}
void CardReader::startFileprint()
{
if(cardOK)
{
sdprinting = true;
}
}
void CardReader::pauseSDPrint()
{
if(sdprinting)
{
sdprinting = false;
}
}
void CardReader penLogFile(char* name)
penLogFile(char* name)
{
logging = true;
openFile(name, false);
}
void CardReaderpenFile(char* name,bool read)
{
if(!cardOK)
return;
file.close();
sdprinting = false;
SdFile myDir;
curDir=&root;
char *fname=name;
char *dirname_start,*dirname_end;
if(name[0]=='/')
{
dirname_start=strchr(name,'/')+1;
while(dirname_start>0)
{
dirname_end=strchr(dirname_start,'/');
//SERIAL_ECHO("start:");SERIAL_ECHOLN((int)(dirname_start-name));
//SERIAL_ECHO("end :");SERIAL_ECHOLN((int)(dirname_end-name));
if(dirname_end>0 && dirname_end>dirname_start)
{
char subdirname[13];
strncpy(subdirname, dirname_start, dirname_end-dirname_start);
subdirname[dirname_end-dirname_start]=0;
SERIAL_ECHOLN(subdirname);
if(!myDir.open(curDir,subdirname,O_READ))
{
SERIAL_PROTOCOLPGM(MSG_SD_OPEN_FILE_FAIL);
SERIAL_PROTOCOL(subdirname);
SERIAL_PROTOCOLLNPGM(".");
return;
}
else
{
//SERIAL_ECHOLN("dive ok");
}
curDir=&myDir;
dirname_start=dirname_end+1;
}
else // the reminder after all /fsa/fdsa/ is the filename
{
fname=dirname_start;
//SERIAL_ECHOLN("remaider");
//SERIAL_ECHOLN(fname);
break;
}
}
}
else //relative path
{
curDir=&workDir;
}
if(read)
{
if (file.open(curDir, fname, O_READ))
{
filesize = file.fileSize();
SERIAL_PROTOCOLPGM(MSG_SD_FILE_OPENED);
SERIAL_PROTOCOL(fname);
SERIAL_PROTOCOLPGM(MSG_SD_SIZE);
SERIAL_PROTOCOLLN(filesize);
sdpos = 0;
SERIAL_PROTOCOLLNPGM(MSG_SD_FILE_SELECTED);
lcd_setstatus(fname);
}
else
{
SERIAL_PROTOCOLPGM(MSG_SD_OPEN_FILE_FAIL);
SERIAL_PROTOCOL(fname);
SERIAL_PROTOCOLLNPGM(".");
}
}
else
{ //write
if (!file.open(curDir, fname, O_CREAT | O_APPEND | O_WRITE | O_TRUNC))
{
SERIAL_PROTOCOLPGM(MSG_SD_OPEN_FILE_FAIL);
SERIAL_PROTOCOL(fname);
SERIAL_PROTOCOLLNPGM(".");
}
else
{
saving = true;
SERIAL_PROTOCOLPGM(MSG_SD_WRITE_TO_FILE);
SERIAL_PROTOCOLLN(name);
lcd_setstatus(fname);
}
}
}
void CardReader::removeFile(char* name)
{
if(!cardOK)
return;
file.close();
sdprinting = false;
SdFile myDir;
curDir=&root;
char *fname=name;
char *dirname_start,*dirname_end;
if(name[0]=='/')
{
dirname_start=strchr(name,'/')+1;
while(dirname_start>0)
{
dirname_end=strchr(dirname_start,'/');
//SERIAL_ECHO("start:");SERIAL_ECHOLN((int)(dirname_start-name));
//SERIAL_ECHO("end :");SERIAL_ECHOLN((int)(dirname_end-name));
if(dirname_end>0 && dirname_end>dirname_start)
{
char subdirname[13];
strncpy(subdirname, dirname_start, dirname_end-dirname_start);
subdirname[dirname_end-dirname_start]=0;
SERIAL_ECHOLN(subdirname);
if(!myDir.open(curDir,subdirname,O_READ))
{
SERIAL_PROTOCOLPGM("open failed, File: ");
SERIAL_PROTOCOL(subdirname);
SERIAL_PROTOCOLLNPGM(".");
return;
}
else
{
//SERIAL_ECHOLN("dive ok");
}
curDir=&myDir;
dirname_start=dirname_end+1;
}
else // the reminder after all /fsa/fdsa/ is the filename
{
fname=dirname_start;
//SERIAL_ECHOLN("remaider");
//SERIAL_ECHOLN(fname);
break;
}
}
}
else //relative path
{
curDir=&workDir;
}
if (file.remove(curDir, fname))
{
SERIAL_PROTOCOLPGM("File deleted:");
SERIAL_PROTOCOL(fname);
sdpos = 0;
}
else
{
SERIAL_PROTOCOLPGM("Deletion failed, File: ");
SERIAL_PROTOCOL(fname);
SERIAL_PROTOCOLLNPGM(".");
}
}
void CardReader::getStatus()
{
if(cardOK){
SERIAL_PROTOCOLPGM(MSG_SD_PRINTING_BYTE);
SERIAL_PROTOCOL(sdpos);
SERIAL_PROTOCOLPGM("/");
SERIAL_PROTOCOLLN(filesize);
}
else{
SERIAL_PROTOCOLLNPGM(MSG_SD_NOT_PRINTING);
}
}
void CardReader::write_command(char *buf)
{
char* begin = buf;
char* npos = 0;
char* end = buf + strlen(buf) - 1;
file.writeError = false;
if((npos = strchr(buf, 'N')) != NULL)
{
begin = strchr(npos, ' ') + 1;
end = strchr(npos, '*') - 1;
}
end[1] = '\r';
end[2] = '\n';
end[3] = '\0';
file.write(begin);
if (file.writeError)
{
SERIAL_ERROR_START;
SERIAL_ERRORLNPGM(MSG_SD_ERR_WRITE_TO_FILE);
}
}
void CardReader::checkautostart(bool force)
{
if(!force)
{
if(!autostart_stilltocheck)
return;
if(autostart_atmillis 0)
{
for(int8_t i=0;i<(int8_t)strlen((char*)p.name);i++)
p.name=tolower(p.name);
//Serial.print((char*)p.name);
//Serial.print(" ");
//Serial.println(autoname);
if(p.name[9]!='~') //skip safety copies
if(strncmp((char*)p.name,autoname,5)==0)
{
char cmd[30];
sprintf_P(cmd, PSTR("M23 %s"), autoname);
enquecommand(cmd);
enquecommand_P(PSTR("M24"));
found=true;
}
}
if(!found)
lastnr=-1;
else
lastnr++;
}
void CardReader::closefile()
{
file.sync();
file.close();
saving = false;
logging = false;
}
void CardReader::getfilename(const uint8_t nr)
{
curDir=&workDir;
lsAction=LS_GetFilename;
nrFiles=nr;
curDir->rewind();
lsDive("",*curDir);
}
uint16_t CardReader::getnrfilenames()
{
curDir=&workDir;
lsAction=LS_Count;
nrFiles=0;
curDir->rewind();
lsDive("",*curDir);
//SERIAL_ECHOLN(nrFiles);
return nrFiles;
}
void CardReader::chdir(const char * relpath)
{
SdFile newfile;
SdFile *parent=&root;
if(workDir.isOpen())
parent=&workDir;
if(!newfile.open(*parent,relpath, O_READ))
{
SERIAL_ECHO_START;
SERIAL_ECHOPGM(MSG_SD_CANT_ENTER_SUBDIR);
SERIAL_ECHOLN(relpath);
}
else
{
if (workDirDepth < MAX_DIR_DEPTH) {
for (int d = ++workDirDepth; d--
workDirParents[d+1] = workDirParents[d];
workDirParents[0]=*parent;
}
workDir=newfile;
}
}
void CardReader::updir()
{
if(workDirDepth > 0)
{
--workDirDepth;
workDir = workDirParents[0];
int d;
for (int d = 0; d < workDirDepth; d++)
workDirParents[d] = workDirParents[d+1];
}
}
void CardReader::printingHasFinished()
{
st_synchronize();
quickStop();
file.close();
sdprinting = false;
if(SD_FINISHED_STEPPERRELEASE)
{
//finishAndDisableSteppers();
enquecommand_P(PSTR(SD_FINISHED_RELEASECOMMAND));
}
autotempShutdown();
}
#endif //SDSUPPORT
****************************************
,#include "Marlin.h"
#include "cardreader.h"
#include "ultralcd.h"
#include "stepper.h"
#include "temperature.h"
#include "language.h"
#ifdef SDSUPPORT
CardReader::CardReader()
{
filesize = 0;
sdpos = 0;
sdprinting = false;
cardOK = false;
saving = false;
logging = false;
autostart_atmillis=0;
workDirDepth = 0;
memset(workDirParents, 0, sizeof(workDirParents));
autostart_stilltocheck=true; //the sd start is delayed, because otherwise the serial cannot answer fast enought to make contact with the hostsoftware.
lastnr=0;
//power to SD reader
#if SDPOWER > -1
SET_OUTPUT(SDPOWER);
WRITE(SDPOWER,HIGH);
#endif //SDPOWER
autostart_atmillis=millis()+5000;
}
char *createFilename(char *buffer,const dir_t &p) //buffer>12characters
{
char *pos=buffer;
for (uint8_t i = 0; i < 11; i++)
{
if (p.name == ' ')continue;
if (i == 8)
{
*pos++='.';
}
*pos++=p.name;
}
*pos++=0;
return buffer;
}
void CardReader::lsDive(const char *prepend,SdFile parent)
{
dir_t p;
uint8_t cnt=0;
while (parent.readDir(p, longFilename) > 0)
{
if( DIR_IS_SUBDIR(&p) && lsAction!=LS_Count && lsAction!=LS_GetFilename) // hence LS_SerialPrint
{
char path[13*2];
char lfilename[13];
createFilename(lfilename,p);
path[0]=0;
if(strlen(prepend)==0) //avoid leading / if already in prepend
{
strcat(path,"/");
}
strcat(path,prepend);
strcat(path,lfilename);
strcat(path,"/");
//Serial.print(path);
SdFile dir;
if(!dir.open(parent,lfilename, O_READ))
{
if(lsAction==LS_SerialPrint)
{
SERIAL_ECHO_START;
SERIAL_ECHOLN(MSG_SD_CANT_OPEN_SUBDIR);
SERIAL_ECHOLN(lfilename);
}
}
lsDive(path,dir);
//close done automatically by destructor of SdFile
}
else
{
if (p.name[0] == DIR_NAME_FREE) break;
if (p.name[0] == DIR_NAME_DELETED || p.name[0] == '.'|| p.name[0] == '_') continue;
if (longFilename[0] != '\0' &&
(longFilename[0] == '.' || longFilename[0] == '_')) continue;
if ( p.name[0] == '.')
{
if ( p.name[1] != '.')
continue;
}
if (!DIR_IS_FILE_OR_SUBDIR(&p)) continue;
filenameIsDir=DIR_IS_SUBDIR(&p);
if(!filenameIsDir)
{
if(p.name[8]!='G') continue;
if(p.name[9]=='~') continue;
}
//if(cnt++!=nr) continue;
createFilename(filename,p);
if(lsAction==LS_SerialPrint)
{
SERIAL_PROTOCOL(prepend);
SERIAL_PROTOCOLLN(filename);
}
else if(lsAction==LS_Count)
{
nrFiles++;
}
else if(lsAction==LS_GetFilename)
{
if(cnt==nrFiles)
return;
cnt++;
}
}
}
}
void CardReader::ls()
{
lsAction=LS_SerialPrint;
if(lsAction==LS_Count)
nrFiles=0;
root.rewind();
lsDive("",root);
}
void CardReader::initsd()
{
cardOK = false;
if(root.isOpen())
root.close();
#ifdef SDSLOW
if (!card.init(SPI_HALF_SPEED,SDSS))
#else
if (!card.init(SPI_FULL_SPEED,SDSS))
#endif
{
//if (!card.init(SPI_HALF_SPEED,SDSS))
SERIAL_ECHO_START;
SERIAL_ECHOLNPGM(MSG_SD_INIT_FAIL);
}
else if (!volume.init(&card))
{
SERIAL_ERROR_START;
SERIAL_ERRORLNPGM(MSG_SD_VOL_INIT_FAIL);
}
else if (!root.openRoot(&volume))
{
SERIAL_ERROR_START;
SERIAL_ERRORLNPGM(MSG_SD_OPENROOT_FAIL);
}
else
{
cardOK = true;
SERIAL_ECHO_START;
SERIAL_ECHOLNPGM(MSG_SD_CARD_OK);
}
workDir=root;
curDir=&root;
/*
if(!workDir.openRoot(&volume))
{
SERIAL_ECHOLNPGM(MSG_SD_WORKDIR_FAIL);
}
*/
}
void CardReader::setroot()
{
/*if(!workDir.openRoot(&volume))
{
SERIAL_ECHOLNPGM(MSG_SD_WORKDIR_FAIL);
}*/
workDir=root;
curDir=&workDir;
}
void CardReader::release()
{
sdprinting = false;
cardOK = false;
}
void CardReader::startFileprint()
{
if(cardOK)
{
sdprinting = true;
}
}
void CardReader::pauseSDPrint()
{
if(sdprinting)
{
sdprinting = false;
}
}
void CardReader
penLogFile(char* name){
logging = true;
openFile(name, false);
}
void CardReader
penFile(char* name,bool read){
if(!cardOK)
return;
file.close();
sdprinting = false;
SdFile myDir;
curDir=&root;
char *fname=name;
char *dirname_start,*dirname_end;
if(name[0]=='/')
{
dirname_start=strchr(name,'/')+1;
while(dirname_start>0)
{
dirname_end=strchr(dirname_start,'/');
//SERIAL_ECHO("start:");SERIAL_ECHOLN((int)(dirname_start-name));
//SERIAL_ECHO("end :");SERIAL_ECHOLN((int)(dirname_end-name));
if(dirname_end>0 && dirname_end>dirname_start)
{
char subdirname[13];
strncpy(subdirname, dirname_start, dirname_end-dirname_start);
subdirname[dirname_end-dirname_start]=0;
SERIAL_ECHOLN(subdirname);
if(!myDir.open(curDir,subdirname,O_READ))
{
SERIAL_PROTOCOLPGM(MSG_SD_OPEN_FILE_FAIL);
SERIAL_PROTOCOL(subdirname);
SERIAL_PROTOCOLLNPGM(".");
return;
}
else
{
//SERIAL_ECHOLN("dive ok");
}
curDir=&myDir;
dirname_start=dirname_end+1;
}
else // the reminder after all /fsa/fdsa/ is the filename
{
fname=dirname_start;
//SERIAL_ECHOLN("remaider");
//SERIAL_ECHOLN(fname);
break;
}
}
}
else //relative path
{
curDir=&workDir;
}
if(read)
{
if (file.open(curDir, fname, O_READ))
{
filesize = file.fileSize();
SERIAL_PROTOCOLPGM(MSG_SD_FILE_OPENED);
SERIAL_PROTOCOL(fname);
SERIAL_PROTOCOLPGM(MSG_SD_SIZE);
SERIAL_PROTOCOLLN(filesize);
sdpos = 0;
SERIAL_PROTOCOLLNPGM(MSG_SD_FILE_SELECTED);
lcd_setstatus(fname);
}
else
{
SERIAL_PROTOCOLPGM(MSG_SD_OPEN_FILE_FAIL);
SERIAL_PROTOCOL(fname);
SERIAL_PROTOCOLLNPGM(".");
}
}
else
{ //write
if (!file.open(curDir, fname, O_CREAT | O_APPEND | O_WRITE | O_TRUNC))
{
SERIAL_PROTOCOLPGM(MSG_SD_OPEN_FILE_FAIL);
SERIAL_PROTOCOL(fname);
SERIAL_PROTOCOLLNPGM(".");
}
else
{
saving = true;
SERIAL_PROTOCOLPGM(MSG_SD_WRITE_TO_FILE);
SERIAL_PROTOCOLLN(name);
lcd_setstatus(fname);
}
}
}
void CardReader::removeFile(char* name)
{
if(!cardOK)
return;
file.close();
sdprinting = false;
SdFile myDir;
curDir=&root;
char *fname=name;
char *dirname_start,*dirname_end;
if(name[0]=='/')
{
dirname_start=strchr(name,'/')+1;
while(dirname_start>0)
{
dirname_end=strchr(dirname_start,'/');
//SERIAL_ECHO("start:");SERIAL_ECHOLN((int)(dirname_start-name));
//SERIAL_ECHO("end :");SERIAL_ECHOLN((int)(dirname_end-name));
if(dirname_end>0 && dirname_end>dirname_start)
{
char subdirname[13];
strncpy(subdirname, dirname_start, dirname_end-dirname_start);
subdirname[dirname_end-dirname_start]=0;
SERIAL_ECHOLN(subdirname);
if(!myDir.open(curDir,subdirname,O_READ))
{
SERIAL_PROTOCOLPGM("open failed, File: ");
SERIAL_PROTOCOL(subdirname);
SERIAL_PROTOCOLLNPGM(".");
return;
}
else
{
//SERIAL_ECHOLN("dive ok");
}
curDir=&myDir;
dirname_start=dirname_end+1;
}
else // the reminder after all /fsa/fdsa/ is the filename
{
fname=dirname_start;
//SERIAL_ECHOLN("remaider");
//SERIAL_ECHOLN(fname);
break;
}
}
}
else //relative path
{
curDir=&workDir;
}
if (file.remove(curDir, fname))
{
SERIAL_PROTOCOLPGM("File deleted:");
SERIAL_PROTOCOL(fname);
sdpos = 0;
}
else
{
SERIAL_PROTOCOLPGM("Deletion failed, File: ");
SERIAL_PROTOCOL(fname);
SERIAL_PROTOCOLLNPGM(".");
}
}
void CardReader::getStatus()
{
if(cardOK){
SERIAL_PROTOCOLPGM(MSG_SD_PRINTING_BYTE);
SERIAL_PROTOCOL(sdpos);
SERIAL_PROTOCOLPGM("/");
SERIAL_PROTOCOLLN(filesize);
}
else{
SERIAL_PROTOCOLLNPGM(MSG_SD_NOT_PRINTING);
}
}
void CardReader::write_command(char *buf)
{
char* begin = buf;
char* npos = 0;
char* end = buf + strlen(buf) - 1;
file.writeError = false;
if((npos = strchr(buf, 'N')) != NULL)
{
begin = strchr(npos, ' ') + 1;
end = strchr(npos, '*') - 1;
}
end[1] = '\r';
end[2] = '\n';
end[3] = '\0';
file.write(begin);
if (file.writeError)
{
SERIAL_ERROR_START;
SERIAL_ERRORLNPGM(MSG_SD_ERR_WRITE_TO_FILE);
}
}
void CardReader::checkautostart(bool force)
{
if(!force)
{
if(!autostart_stilltocheck)
return;
if(autostart_atmillis 0)
{
for(int8_t i=0;i<(int8_t)strlen((char*)p.name);i++)
p.name=tolower(p.name);
//Serial.print((char*)p.name);
//Serial.print(" ");
//Serial.println(autoname);
if(p.name[9]!='~') //skip safety copies
if(strncmp((char*)p.name,autoname,5)==0)
{
char cmd[30];
sprintf_P(cmd, PSTR("M23 %s"), autoname);
enquecommand(cmd);
enquecommand_P(PSTR("M24"));
found=true;
}
}
if(!found)
lastnr=-1;
else
lastnr++;
}
void CardReader::closefile()
{
file.sync();
file.close();
saving = false;
logging = false;
}
void CardReader::getfilename(const uint8_t nr)
{
curDir=&workDir;
lsAction=LS_GetFilename;
nrFiles=nr;
curDir->rewind();
lsDive("",*curDir);
}
uint16_t CardReader::getnrfilenames()
{
curDir=&workDir;
lsAction=LS_Count;
nrFiles=0;
curDir->rewind();
lsDive("",*curDir);
//SERIAL_ECHOLN(nrFiles);
return nrFiles;
}
void CardReader::chdir(const char * relpath)
{
SdFile newfile;
SdFile *parent=&root;
if(workDir.isOpen())
parent=&workDir;
if(!newfile.open(*parent,relpath, O_READ))
{
SERIAL_ECHO_START;
SERIAL_ECHOPGM(MSG_SD_CANT_ENTER_SUBDIR);
SERIAL_ECHOLN(relpath);
}
else
{
if (workDirDepth < MAX_DIR_DEPTH) {
for (int d = ++workDirDepth; d--
workDirParents[d+1] = workDirParents[d];
workDirParents[0]=*parent;
}
workDir=newfile;
}
}
void CardReader::updir()
{
if(workDirDepth > 0)
{
--workDirDepth;
workDir = workDirParents[0];
int d;
for (int d = 0; d < workDirDepth; d++)
workDirParents[d] = workDirParents[d+1];
}
}
void CardReader::printingHasFinished()
{
st_synchronize();
quickStop();
file.close();
sdprinting = false;
if(SD_FINISHED_STEPPERRELEASE)
{
//finishAndDisableSteppers();
enquecommand_P(PSTR(SD_FINISHED_RELEASECOMMAND));
}
autotempShutdown();
}
#endif //SDSUPPORT
|
Re: Hat jemand Full Graphic Smart LCD Controller von reprapdiscount am laufen? 27. March 2015 02:54 |
Registrierungsdatum: 11 Jahre zuvor Beiträge: 2.469 |
Eben
Und du weist nicht was du tust.
Schau mal bei 80% deines Textes da ist das display zu aktivieren nicht da oben was du gemacht hast
Und man kann die config als Datei ranhaengen und nicht so am Stück einfügen.
Commercium ----> Ramps, RADDS, e3d-Hotends und Filament kauft man hier.. und neu auch Schrauben,Muttern und Unterlegscheiben
Probleme mit dem e3d und bei mir gekauft? Schickt es ein, ich teste es für euch ob es wirklich defekt ist
Print Quality Troubleshooting Guide hier lang..
Und du weist nicht was du tust.
Schau mal bei 80% deines Textes da ist das display zu aktivieren nicht da oben was du gemacht hast
Und man kann die config als Datei ranhaengen und nicht so am Stück einfügen.
Commercium ----> Ramps, RADDS, e3d-Hotends und Filament kauft man hier.. und neu auch Schrauben,Muttern und Unterlegscheiben
Probleme mit dem e3d und bei mir gekauft? Schickt es ein, ich teste es für euch ob es wirklich defekt ist
Print Quality Troubleshooting Guide hier lang..
|
Re: Hat jemand Full Graphic Smart LCD Controller von reprapdiscount am laufen? 27. March 2015 12:40 |
Registrierungsdatum: 12 Jahre zuvor Beiträge: 212 |
Hi !
Falsch: ",#include "Marlin.h""
Richtig: "#include "Marlin.h"
Grüße / Regards
STB
______________________________________________________________
Basics about MOSFETs
Falsch: ",#include "Marlin.h""
Richtig: "#include "Marlin.h"
Grüße / Regards
STB
______________________________________________________________
Basics about MOSFETs
|
Re: Hat jemand Full Graphic Smart LCD Controller von reprapdiscount am laufen? 27. March 2015 14:41 |
Registrierungsdatum: 9 Jahre zuvor Beiträge: 300 |
@Hallo gdservice
mach mal folgendes ,
//#define REPRAP_DISCOUNT_FULL_GRAPHIC_SMART_CONTROLLER
//#include kommittier das so mal aus.
scroll mal nach ganz unten //LCD and SD support
// The RepRapDiscount Smart Controller (white PCcool smiley
// [reprap.org]
//#define REPRAP_DISCOUNT_SMART_CONTROLLER das so aus kommitiren //
// The RepRapDiscount FULL GRAPHIC Smart Controller (quadratic white PCcool smiley
// [reprap.org]
//
// ==> REMEMBER TO INSTALL U8glib to your ARDUINO library folder: [code.google.com]
//#define REPRAP_DISCOUNT_FULL_GRAPHIC_SMART_CONTROLLER das weg machen //
dann müsste es klappen
wenn es nicht klappen sollte , lade dir mal das herunter GitHab Marlin v1.0.2
Edit: lösch nur mal das #include habe es getestet.
1-mal bearbeitet. Zuletzt am 27.03.15 14:59.
mach mal folgendes ,
//#define REPRAP_DISCOUNT_FULL_GRAPHIC_SMART_CONTROLLER
//#include kommittier das so mal aus.
scroll mal nach ganz unten //LCD and SD support
// The RepRapDiscount Smart Controller (white PCcool smiley
// [reprap.org]
//#define REPRAP_DISCOUNT_SMART_CONTROLLER das so aus kommitiren //
// The RepRapDiscount FULL GRAPHIC Smart Controller (quadratic white PCcool smiley
// [reprap.org]
//
// ==> REMEMBER TO INSTALL U8glib to your ARDUINO library folder: [code.google.com]
//#define REPRAP_DISCOUNT_FULL_GRAPHIC_SMART_CONTROLLER das weg machen //
dann müsste es klappen
wenn es nicht klappen sollte , lade dir mal das herunter GitHab Marlin v1.0.2
Edit: lösch nur mal das #include habe es getestet.
1-mal bearbeitet. Zuletzt am 27.03.15 14:59.

{kind=link}
{kind=link}
{kind=link}
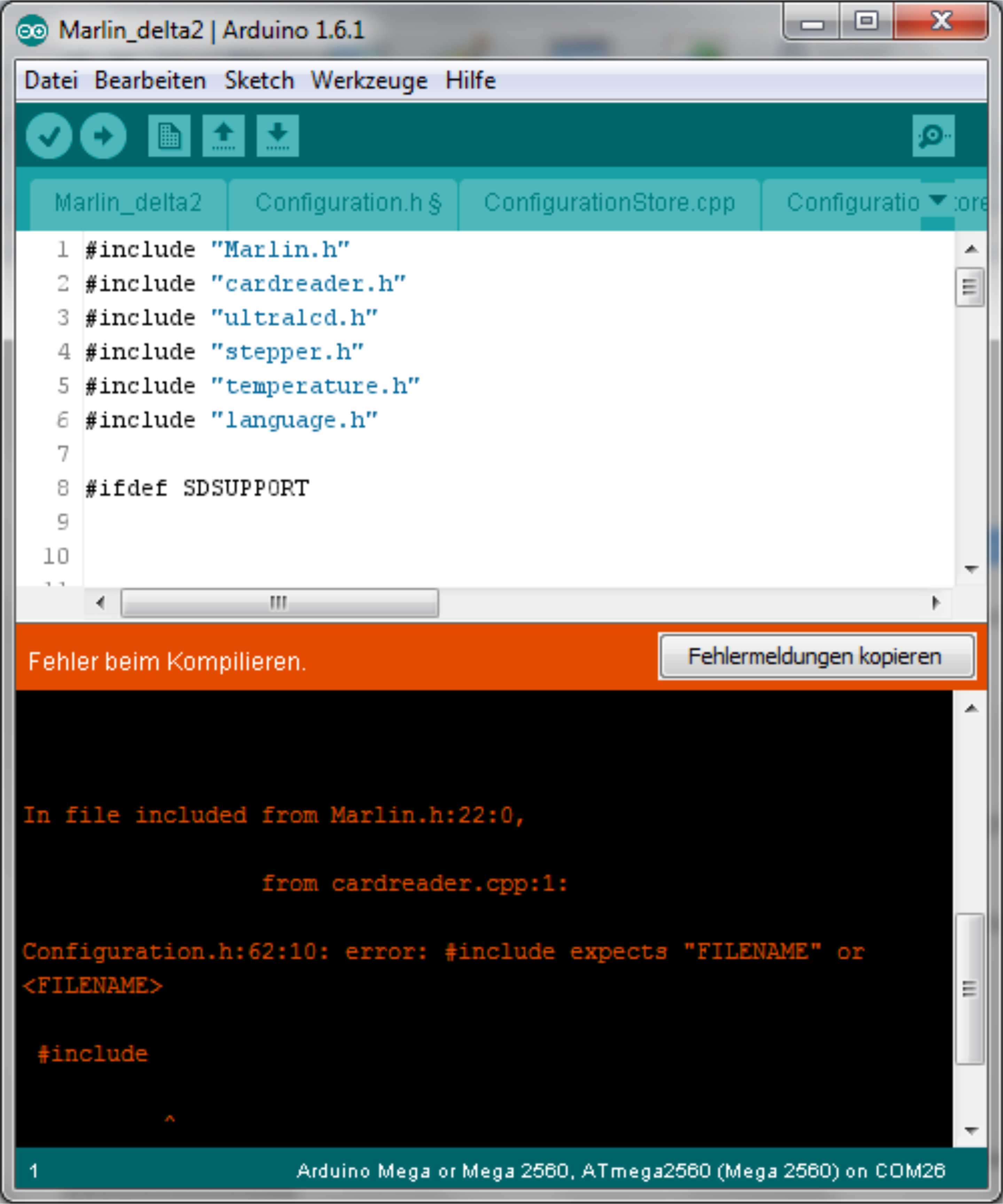{kind=link}
In diesem Forum dürfen leider nur registrierte Teilnehmer schreiben.