Wantai 0,9° (400 steps) Schrittmotoren für Riementrieb
geschrieben von angelo
|
Wantai 0,9° (400 steps) Schrittmotoren für Riementrieb 20. January 2014 09:45 |
Registrierungsdatum: 11 Jahre zuvor Beiträge: 1.807 |
Kurz mal eine Frage, bitte.
Ich will mir diese Schrittmotoren einbauen: Wantai Nema17 Stepper Motor 0.9° 42BYGHM810
Für meinen Delta werde ich pro Turm (Achse) wegen der Zahnriehmenlänge wohl 2 Motoren (oben und unten) und zwei gegenläufige 6mm GT2 Riemen einbauen müssen (Backslash).
Eine Umdrehung bei GT2 mit 18 Zähnen 36mm, Gewicht des Laufschlittens (1G) ca. 300 Gramm, Verfahrweg ca. 1200 mm.
Machen diese Sinn, bzw. kennt einer die Qualität von Wantai?
[www.wantmotor.com]
Part No.: 42BYGHM810
Frame Size: NEMA17
Step Angle: 0.9 degree
Voltage: 1.92V
Current: 2.4 A/phase
Resistance: 0.8 Ohm/phase
Inductance: 1.8 mH/phase
Holding torque: 4200g-cm 60OZ-IN
Rotor inertia: 68 g-cm2
Detent torque: 0.22 kg-cm
Number of wire leads: 4
Weight: 0.34 kg
Length: 48mm
Motor Shaft: 5mm
Front Shaft length: 20mm
Für einen Tipp oder Ratschlag wäre ich sehr Dankbar.
Muss bald mal die Motoren parallel bestellen.
Danke und Gruss
Angelo
1-mal bearbeitet. Zuletzt am 20.01.14 09:47.
Ich will mir diese Schrittmotoren einbauen: Wantai Nema17 Stepper Motor 0.9° 42BYGHM810
Für meinen Delta werde ich pro Turm (Achse) wegen der Zahnriehmenlänge wohl 2 Motoren (oben und unten) und zwei gegenläufige 6mm GT2 Riemen einbauen müssen (Backslash).
Eine Umdrehung bei GT2 mit 18 Zähnen 36mm, Gewicht des Laufschlittens (1G) ca. 300 Gramm, Verfahrweg ca. 1200 mm.
Machen diese Sinn, bzw. kennt einer die Qualität von Wantai?
[www.wantmotor.com]
Part No.: 42BYGHM810
Frame Size: NEMA17
Step Angle: 0.9 degree
Voltage: 1.92V
Current: 2.4 A/phase
Resistance: 0.8 Ohm/phase
Inductance: 1.8 mH/phase
Holding torque: 4200g-cm 60OZ-IN
Rotor inertia: 68 g-cm2
Detent torque: 0.22 kg-cm
Number of wire leads: 4
Weight: 0.34 kg
Length: 48mm
Motor Shaft: 5mm
Front Shaft length: 20mm
Für einen Tipp oder Ratschlag wäre ich sehr Dankbar.
Muss bald mal die Motoren parallel bestellen.
Danke und Gruss
Angelo
1-mal bearbeitet. Zuletzt am 20.01.14 09:47.
|
Re: Wantai 0,9° (400 steps) Schrittmotoren für Riementrieb 21. January 2014 00:28 |
Registrierungsdatum: 10 Jahre zuvor Beiträge: 1.103 |
|
Re: Wantai 0,9° (400 steps) Schrittmotoren für Riementrieb 21. January 2014 06:43 |
Registrierungsdatum: 11 Jahre zuvor Beiträge: 1.807 |
|
Re: Wantai 0,9° (400 steps) Schrittmotoren für Riementrieb 21. January 2014 14:35 |
Registrierungsdatum: 10 Jahre zuvor Beiträge: 1.164 |
Also, kenne mich ein wenig aus mit Riementrieben, aber nur ein wenig 
Im Bezug auf 1,2m Verfahrweg, würde ich das Ganze wirklich nicht mehr mit GT2 Riementrieben machen. Wobei GT2 die falsche Bezeichnung ist. Es müsste wenn dann GT3 2M heißen. Dieser Riemen kommt von Gates, allerdings hat man Probleme bei der Riemenscheibenbeschaffung. Den China Scheiß, weißt ja, würde ich jetzt nicht nehmen.
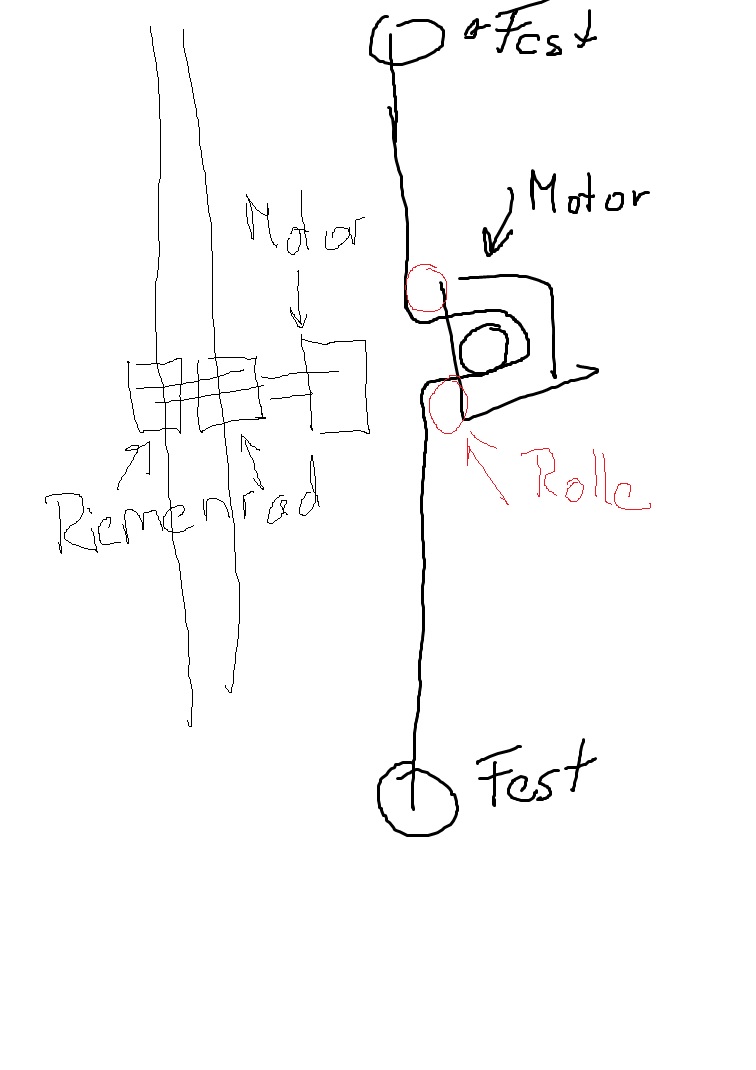
Bei 1,2m musst Du mit Sicherheit mechanisch ein wenig mehr tun, dass bedeutet der Riemen muss Intelligent verspannt und geführt sein. Eine Umlenkung oben und unten, auch mit 2 Motoren halte ich als nicht sinnvoll bei dieser Länge. Besser wäre es wenn Du den Motor direkt an den Schlitten machst und den Riemen fest spannst. Der Riemen muss allerdings dann über min. 2 Rollen, besser 4 Rollen am Rücken "geführt/gespannt" werden. Bei vergleichbaren Riemen wie z.B. MXL würde ich jetzt sagen am besten 2 Riemen nehmen, fest spannen oben und unten, Motor direkt an Schlitten (Nachteil ist dann die bewegte Masse), und über 2 Zahnriemenscheiben leicht verspannt führen lassen. somit hast weniger Probleme.
Würde ich ausprobieren wenn ich vor der Wahl stehen würde. Allerdings würde ich den Riemen ersetzen und würde Zahnstangentriebe nehmen, gibt es auch bei Mädler in Kunststoffausführung. Zahnrad (in der Breite geteilt) genau so wieder verspannen mit Fibro Elastomer, kann man schön einstellen und fertig. Kein Spiel, nur ein wenig laut. Mit Kunststoff allerdings erträglich.
Hoffe ich konnte Dir ein wenig helfen Für das sind wir ja hier
Für das sind wir ja hier
Gruß
Mirco
Druckwerk-3D.com
Im Bezug auf 1,2m Verfahrweg, würde ich das Ganze wirklich nicht mehr mit GT2 Riementrieben machen. Wobei GT2 die falsche Bezeichnung ist. Es müsste wenn dann GT3 2M heißen. Dieser Riemen kommt von Gates, allerdings hat man Probleme bei der Riemenscheibenbeschaffung. Den China Scheiß, weißt ja, würde ich jetzt nicht nehmen.
Bei 1,2m musst Du mit Sicherheit mechanisch ein wenig mehr tun, dass bedeutet der Riemen muss Intelligent verspannt und geführt sein. Eine Umlenkung oben und unten, auch mit 2 Motoren halte ich als nicht sinnvoll bei dieser Länge. Besser wäre es wenn Du den Motor direkt an den Schlitten machst und den Riemen fest spannst. Der Riemen muss allerdings dann über min. 2 Rollen, besser 4 Rollen am Rücken "geführt/gespannt" werden. Bei vergleichbaren Riemen wie z.B. MXL würde ich jetzt sagen am besten 2 Riemen nehmen, fest spannen oben und unten, Motor direkt an Schlitten (Nachteil ist dann die bewegte Masse), und über 2 Zahnriemenscheiben leicht verspannt führen lassen. somit hast weniger Probleme.
Würde ich ausprobieren wenn ich vor der Wahl stehen würde. Allerdings würde ich den Riemen ersetzen und würde Zahnstangentriebe nehmen, gibt es auch bei Mädler in Kunststoffausführung. Zahnrad (in der Breite geteilt) genau so wieder verspannen mit Fibro Elastomer, kann man schön einstellen und fertig. Kein Spiel, nur ein wenig laut. Mit Kunststoff allerdings erträglich.
Hoffe ich konnte Dir ein wenig helfen
Für das sind wir ja hier Gruß
Mirco
Druckwerk-3D.com
{kind=link}
{kind=link}
|
Re: Wantai 0,9° (400 steps) Schrittmotoren für Riementrieb 22. January 2014 02:38 |
Registrierungsdatum: 14 Jahre zuvor Beiträge: 494 |
Mit bewegten Motoren nimmst du dir den großen Gewichtsvorteil den so ein Delta hat. Obwohl ich diesen Antrieb mit Motor und Riemenumlenkung wohl auch bald mal einsetzen werde.
Zwei Rienem finde ich auch übertrieben. Lieber einen sehr breiten.
z. B. die HDT Profile, die gibt es auch in 15 mm Breite und vorgedehnt. (maedler)
Zwei Rienem finde ich auch übertrieben. Lieber einen sehr breiten.
z. B. die HDT Profile, die gibt es auch in 15 mm Breite und vorgedehnt. (maedler)
|
Re: Wantai 0,9° (400 steps) Schrittmotoren für Riementrieb 22. January 2014 04:20 |
Registrierungsdatum: 11 Jahre zuvor Beiträge: 1.807 |
Hallo Chaosstifter,
vielen Dank. Schau mir die HDT Riemen gleich einmal an. Haben diese auch Keflar-Fasern ?
Kannst du mir bitte noch erklären, wie du das mit dem Gewichtsvorteil beim Delta meinst, bitte.
Mit den zwei riemen hatte ich die Idee bei zwei gegenlaufenden Motoren, das ein Riemen immer spannt und umgekehrt.
@Mirco_S
danke dir für die Infos.
Ein Schrittmotor hat mit Ritzel und Kabel ca. 500 gramm + Laufwagen.
Zahnstangentriebe haben immer Schlupf ...
Ich schau trotzdem noch einmal nach, danke.
Gruss
angelo
1-mal bearbeitet. Zuletzt am 22.01.14 04:20.
vielen Dank. Schau mir die HDT Riemen gleich einmal an. Haben diese auch Keflar-Fasern ?
Kannst du mir bitte noch erklären, wie du das mit dem Gewichtsvorteil beim Delta meinst, bitte.
Mit den zwei riemen hatte ich die Idee bei zwei gegenlaufenden Motoren, das ein Riemen immer spannt und umgekehrt.
@Mirco_S
danke dir für die Infos.
Ein Schrittmotor hat mit Ritzel und Kabel ca. 500 gramm + Laufwagen.
Zahnstangentriebe haben immer Schlupf ...
Ich schau trotzdem noch einmal nach, danke.
Gruss
angelo
1-mal bearbeitet. Zuletzt am 22.01.14 04:20.
|
Re: Wantai 0,9° (400 steps) Schrittmotoren für Riementrieb 22. January 2014 06:58 |
Registrierungsdatum: 10 Jahre zuvor Beiträge: 1.164 |
Also,
bezüglich Spiel ist das eigentlich ganz einfach.
Schau Dir die Bilder an. Hier muss man das Zahnrad teilen und dann Fibro Kunstoff Federelemente reinquetschen (lassen sich sehr gut frästechnisch bearbeiten). Diese werden vom Zahn aus gesehen nicht in beide Zahnräder gleich auf der gleichen Achse rein gefräst sondern so um 2-5° versetzt (ist vom Zahnflankenspiel abhängig).
Beide liegen auf der Motorwelle, das vordere kann man fest machen, das hintere mit einem Sprengring auf der Motorwelle befestigen, vielleicht noch eine Tellerfeder rein und gut müsste es sein. Die Montage ist ein wenig ein Scheiß, aber es geht. hier bei diesem Beispiel ist es eine geradverzahnte Stange. Es müsste schon eine Evolventenverzahnung sein. Rollt sich besser und genauer ab, Qualität 8-10 müsste ausreichend sein. Wenn es das noch als schrägverzahnt gibt, perfekt!
Beim umlaufenden Riemen, hast Du immer das Problem dass dieser mit schwingt, deshalb der Rat, Riemen oben und unten fest machen, HDT Profil sehr gut, rollt sich besser ab, Nachteil, keine Teilung unter 3 verfügbar, hier verschenkt man ein wenig was an Genauigkeit, aber gut, damit kann man vermutlich leben.
Bei den Zahnstangen, es müsste schon was auf dem Markt geben in die Richtung, nimm nicht Polymide sondern POM ist besser.
Würde ich einen Delta bauen, dann mit diesem Antrieb, und vielleicht nicht mit Hiwin Wagen. Nimm NSK wenn schon dann schon. Ist nicht umsonst Weltmarktführer. Hier ist die 15er Serie die billigste. Wobei ich eine andere Konstruktion wählen würde.
Gruß
Mirco
Druckwerk-3D.com
bezüglich Spiel ist das eigentlich ganz einfach.
Schau Dir die Bilder an. Hier muss man das Zahnrad teilen und dann Fibro Kunstoff Federelemente reinquetschen (lassen sich sehr gut frästechnisch bearbeiten). Diese werden vom Zahn aus gesehen nicht in beide Zahnräder gleich auf der gleichen Achse rein gefräst sondern so um 2-5° versetzt (ist vom Zahnflankenspiel abhängig).
Beide liegen auf der Motorwelle, das vordere kann man fest machen, das hintere mit einem Sprengring auf der Motorwelle befestigen, vielleicht noch eine Tellerfeder rein und gut müsste es sein. Die Montage ist ein wenig ein Scheiß, aber es geht. hier bei diesem Beispiel ist es eine geradverzahnte Stange. Es müsste schon eine Evolventenverzahnung sein. Rollt sich besser und genauer ab, Qualität 8-10 müsste ausreichend sein. Wenn es das noch als schrägverzahnt gibt, perfekt!
Beim umlaufenden Riemen, hast Du immer das Problem dass dieser mit schwingt, deshalb der Rat, Riemen oben und unten fest machen, HDT Profil sehr gut, rollt sich besser ab, Nachteil, keine Teilung unter 3 verfügbar, hier verschenkt man ein wenig was an Genauigkeit, aber gut, damit kann man vermutlich leben.
Bei den Zahnstangen, es müsste schon was auf dem Markt geben in die Richtung, nimm nicht Polymide sondern POM ist besser.
Würde ich einen Delta bauen, dann mit diesem Antrieb, und vielleicht nicht mit Hiwin Wagen. Nimm NSK wenn schon dann schon. Ist nicht umsonst Weltmarktführer. Hier ist die 15er Serie die billigste. Wobei ich eine andere Konstruktion wählen würde.
Gruß
Mirco
Druckwerk-3D.com
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
In diesem Forum dürfen leider nur registrierte Teilnehmer schreiben.