Motorgeräusch = SIgnaltute eines rückwärtsfahrenden LKWs
geschrieben von Genneri
|
Motorgeräusch = SIgnaltute eines rückwärtsfahrenden LKWs 25. November 2019 02:58 |
Registrierungsdatum: 6 Jahre zuvor Beiträge: 29 |
Hallöchen,
ich bin gerade dabei bei meinem Anet A8 das Motherboard auszutauschen (neben den Motoren somit fast das letzte Orginalteil) Das habe ich nun auch schon geschafft, leider wollen nun die Motoren nicht mehr so, wie sie sollen. Statt flüssiger Bewegungen gibt es eine Art kurzes anruckeln, dann Stillstand und ein lautes Geräusch, was ich nur mit einer kaputten Signaltute eines rückwärtsfahrenden LKWs vergleichen kann.
Folgende Elektronik benutze ich:
Mks Gen V1.4
A4988 Stepper Driver (dadrunter sind jeweils drei Jumper verbastelt)
Netzteil:12V 20A (Orginal Anet)
5 Motoren (dual z-Axis) (Spezifikation sind mir leider unbekannt, Orginal Anet, Nema 17 Style)
Marlin 1.1.9 Bugfix als Firmware
Ich habe bereits folgendes versucht:
google, Themensuche des Forums bin aber leider nicht fündig geworden
Desweiteren habe ich mal bei der X-Axis den Stepper-Driver ausgetauscht gegen einen DRV8825 = gleiches Problem
Ich habe den Stepper Driver gegen einen anderen A4988 ausgetauscht = gleiches Problem
Ich habe den Motor getauscht an der gleichen Axis, jeweils mit alten, neuen A4988 und DRV8825 = gleiches Problem
Ich habe beides getauscht = gleiches Problem
Kabelgetauscht = gleiches Problem
Kabelreihenfolge untersucht und B und A getauscht = gleiches Problem
Ich würde mich über jede Hilfestellung sehr freuen. Vielen Dank.
Gen
1-mal bearbeitet. Zuletzt am 25.11.19 02:59.
ich bin gerade dabei bei meinem Anet A8 das Motherboard auszutauschen (neben den Motoren somit fast das letzte Orginalteil) Das habe ich nun auch schon geschafft, leider wollen nun die Motoren nicht mehr so, wie sie sollen. Statt flüssiger Bewegungen gibt es eine Art kurzes anruckeln, dann Stillstand und ein lautes Geräusch, was ich nur mit einer kaputten Signaltute eines rückwärtsfahrenden LKWs vergleichen kann.
Folgende Elektronik benutze ich:
Mks Gen V1.4
A4988 Stepper Driver (dadrunter sind jeweils drei Jumper verbastelt)
Netzteil:12V 20A (Orginal Anet)
5 Motoren (dual z-Axis) (Spezifikation sind mir leider unbekannt, Orginal Anet, Nema 17 Style)
Marlin 1.1.9 Bugfix als Firmware
Ich habe bereits folgendes versucht:
google, Themensuche des Forums bin aber leider nicht fündig geworden
Desweiteren habe ich mal bei der X-Axis den Stepper-Driver ausgetauscht gegen einen DRV8825 = gleiches Problem
Ich habe den Stepper Driver gegen einen anderen A4988 ausgetauscht = gleiches Problem
Ich habe den Motor getauscht an der gleichen Axis, jeweils mit alten, neuen A4988 und DRV8825 = gleiches Problem
Ich habe beides getauscht = gleiches Problem
Kabelgetauscht = gleiches Problem
Kabelreihenfolge untersucht und B und A getauscht = gleiches Problem
Ich würde mich über jede Hilfestellung sehr freuen. Vielen Dank.
Gen
1-mal bearbeitet. Zuletzt am 25.11.19 02:59.
|
Re: Motorgeräusch = SIgnaltute eines rückwärtsfahrenden LKWs 25. November 2019 03:14 |
Administrator Registrierungsdatum: 16 Jahre zuvor Beiträge: 13.884 |
... die Schrittfrequenz ist viel zu hoch - entweder hat's die Mikroschritte verstellt (bzw. nicht passend eingestellt) oder du mußt die Geschwindigkeiten drastisch reduzieren ...
Viktor
--------
Aufruf zum Projekt "Müll-freie Meere" - [reprap.org] -- Deutsche Facebook-Gruppe - [www.facebook.com]
Call for the project "garbage-free seas" - [reprap.org]
Viktor
--------
Aufruf zum Projekt "Müll-freie Meere" - [reprap.org] -- Deutsche Facebook-Gruppe - [www.facebook.com]
Call for the project "garbage-free seas" - [reprap.org]
|
Re: Motorgeräusch = SIgnaltute eines rückwärtsfahrenden LKWs 25. November 2019 04:08 |
Registrierungsdatum: 6 Jahre zuvor Beiträge: 29 |
Hallo Viktor,
tatsächlich hatte ich eigentlich alles aus der alten Marlin-Firmware übernommen. Unterschied war jedoch u.a. das man unter "Stepper Driver" nun die A4988 defined. Das sind meine Movment Settings die ich benutze, ich seh da nix falsches?!
Vielen Dank, Gen
========================================================================
//============================== Movement Settings ============================
//=============================================================================
// @section motion
/**
* Default Settings
*
* These settings can be reset by M502
*
* Note that if EEPROM is enabled, saved values will override these.
*/
/**
* With this option each E stepper can have its own factors for the
* following movement settings. If fewer factors are given than the
* total number of extruders, the last value applies to the rest.
*/
//#define DISTINCT_E_FACTORS
/**
* Default Axis Steps Per Unit (steps/mm)
* Override with M92
* X, Y, Z, E0 [, E1[, E2[, E3[, E4]]]]
*/
#define DEFAULT_AXIS_STEPS_PER_UNIT { 100, 100, 400, 95 }
/**
* Default Max Feed Rate (mm/s)
* Override with M203
* X, Y, Z, E0 [, E1[, E2[, E3[, E4]]]]
*/
#define DEFAULT_MAX_FEEDRATE { 400, 400, 8, 50 }
/**
* Default Max Acceleration (change/s) change = mm/s
* (Maximum start speed for accelerated moves)
* Override with M201
* X, Y, Z, E0 [, E1[, E2[, E3[, E4]]]]
*/
#define DEFAULT_MAX_ACCELERATION { 2000, 2000, 100, 10000 }
/**
* Default Acceleration (change/s) change = mm/s
* Override with M204
*
* M204 P Acceleration
* M204 R Retract Acceleration
* M204 T Travel Acceleration
*/
#define DEFAULT_ACCELERATION 400 // X, Y, Z and E acceleration for printing moves
#define DEFAULT_RETRACT_ACCELERATION 1000 // E acceleration for retracts
#define DEFAULT_TRAVEL_ACCELERATION 1000 // X, Y, Z acceleration for travel (non printing) moves
/**
* Default Jerk (mm/s)
* Override with M205 X Y Z E
*
* "Jerk" specifies the minimum speed change that requires acceleration.
* When changing speed and direction, if the difference is less than the
* value set here, it may happen instantaneously.
*/
#define DEFAULT_XJERK 20.0
#define DEFAULT_YJERK 20.0
#define DEFAULT_ZJERK 0.3
#define DEFAULT_EJERK 5.0
/**
* S-Curve Acceleration
*
* This option eliminates vibration during printing by fitting a Bézier
* curve to move acceleration, producing much smoother direction changes.
*
* See [github.com]
*/
//#define S_CURVE_ACCELERATION
tatsächlich hatte ich eigentlich alles aus der alten Marlin-Firmware übernommen. Unterschied war jedoch u.a. das man unter "Stepper Driver" nun die A4988 defined. Das sind meine Movment Settings die ich benutze, ich seh da nix falsches?!
Vielen Dank, Gen
========================================================================
//============================== Movement Settings ============================
//=============================================================================
// @section motion
/**
* Default Settings
*
* These settings can be reset by M502
*
* Note that if EEPROM is enabled, saved values will override these.
*/
/**
* With this option each E stepper can have its own factors for the
* following movement settings. If fewer factors are given than the
* total number of extruders, the last value applies to the rest.
*/
//#define DISTINCT_E_FACTORS
/**
* Default Axis Steps Per Unit (steps/mm)
* Override with M92
* X, Y, Z, E0 [, E1[, E2[, E3[, E4]]]]
*/
#define DEFAULT_AXIS_STEPS_PER_UNIT { 100, 100, 400, 95 }
/**
* Default Max Feed Rate (mm/s)
* Override with M203
* X, Y, Z, E0 [, E1[, E2[, E3[, E4]]]]
*/
#define DEFAULT_MAX_FEEDRATE { 400, 400, 8, 50 }
/**
* Default Max Acceleration (change/s) change = mm/s
* (Maximum start speed for accelerated moves)
* Override with M201
* X, Y, Z, E0 [, E1[, E2[, E3[, E4]]]]
*/
#define DEFAULT_MAX_ACCELERATION { 2000, 2000, 100, 10000 }
/**
* Default Acceleration (change/s) change = mm/s
* Override with M204
*
* M204 P Acceleration
* M204 R Retract Acceleration
* M204 T Travel Acceleration
*/
#define DEFAULT_ACCELERATION 400 // X, Y, Z and E acceleration for printing moves
#define DEFAULT_RETRACT_ACCELERATION 1000 // E acceleration for retracts
#define DEFAULT_TRAVEL_ACCELERATION 1000 // X, Y, Z acceleration for travel (non printing) moves
/**
* Default Jerk (mm/s)
* Override with M205 X Y Z E
*
* "Jerk" specifies the minimum speed change that requires acceleration.
* When changing speed and direction, if the difference is less than the
* value set here, it may happen instantaneously.
*/
#define DEFAULT_XJERK 20.0
#define DEFAULT_YJERK 20.0
#define DEFAULT_ZJERK 0.3
#define DEFAULT_EJERK 5.0
/**
* S-Curve Acceleration
*
* This option eliminates vibration during printing by fitting a Bézier
* curve to move acceleration, producing much smoother direction changes.
*
* See [github.com]
*/
//#define S_CURVE_ACCELERATION
|
Re: Motorgeräusch = SIgnaltute eines rückwärtsfahrenden LKWs 25. November 2019 04:17 |
Administrator Registrierungsdatum: 16 Jahre zuvor Beiträge: 13.884 |
... die Mikroschritte setzt du entweder über Jumper unter den Treibern oder per Software, wenn's "intelligente" Treiber sind -- das hat mit den "Axis Steps Per Unit" erstmal nichts zu tun (die sind nur sekundär von den Mikroschritten abhängig) ...
Viktor
--------
Aufruf zum Projekt "Müll-freie Meere" - [reprap.org] -- Deutsche Facebook-Gruppe - [www.facebook.com]
Call for the project "garbage-free seas" - [reprap.org]
Viktor
--------
Aufruf zum Projekt "Müll-freie Meere" - [reprap.org] -- Deutsche Facebook-Gruppe - [www.facebook.com]
Call for the project "garbage-free seas" - [reprap.org]
|
Re: Motorgeräusch = SIgnaltute eines rückwärtsfahrenden LKWs 25. November 2019 05:15 |
Registrierungsdatum: 6 Jahre zuvor Beiträge: 29 |
Hallo Viktor,
das probiere ich mal aus. ich hatte jedoch hier gelesen [sturm.selfhost.eu] , dass man bei den A4988 immer alle drei Jumper setzt. Dementsprechend sitzen auch unter meinen Treibern jeweils drei Jumper.
Liebe Grüße, Gen
" Die Steckplätze der Jumper werden von link nach rechts jeweils mit MS1, MS2 und MS3 bezeichnet. Gemäß folgender Tabelle wird für A4988-Treiber die Schrittweite (Microstepping) eingestellt:
MS1 MS2 MS3 Schrittweite
0 0 0 1 -> Vollschritt
x 0 0 1/2 -> Halbschritt
0 x 0 1/4 -> Viertelschritt
x x 0 1/8 -> Achtelschritt
x x x 1/16 -> Sechzehntelschritt
Da nahezu alle Konfigurationen im 3D-Druckerbereich von 1/16-Mikrostepping ausgehen, rate ich dazu, dies auch beim Aufbau einzustellen. Das heißt:
Beim A4988 werden alle Jumper gesteckt."
EDIT: A4988 sind meiner Meinung nach keine "intelligenten" Treiber.
2-mal bearbeitet. Zuletzt am 25.11.19 05:25.
das probiere ich mal aus. ich hatte jedoch hier gelesen [sturm.selfhost.eu] , dass man bei den A4988 immer alle drei Jumper setzt. Dementsprechend sitzen auch unter meinen Treibern jeweils drei Jumper.
Liebe Grüße, Gen
" Die Steckplätze der Jumper werden von link nach rechts jeweils mit MS1, MS2 und MS3 bezeichnet. Gemäß folgender Tabelle wird für A4988-Treiber die Schrittweite (Microstepping) eingestellt:
MS1 MS2 MS3 Schrittweite
0 0 0 1 -> Vollschritt
x 0 0 1/2 -> Halbschritt
0 x 0 1/4 -> Viertelschritt
x x 0 1/8 -> Achtelschritt
x x x 1/16 -> Sechzehntelschritt
Da nahezu alle Konfigurationen im 3D-Druckerbereich von 1/16-Mikrostepping ausgehen, rate ich dazu, dies auch beim Aufbau einzustellen. Das heißt:
Beim A4988 werden alle Jumper gesteckt."
EDIT: A4988 sind meiner Meinung nach keine "intelligenten" Treiber.
2-mal bearbeitet. Zuletzt am 25.11.19 05:25.
|
Re: Motorgeräusch = SIgnaltute eines rückwärtsfahrenden LKWs 25. November 2019 05:56 |
Administrator Registrierungsdatum: 16 Jahre zuvor Beiträge: 13.884 |
... wenn die Mikroschritt-Jumper richtig sitzen (und auch erkannt werden), und das laute "Jaulen" darauf hindeutet, daß der Strom nicht zu niedrig ist, dann liegt es mit größter Wahrscheinlichkeit an einer zu hoch eingestellten Beschleunigung und/oder Geschwindigkeit, so daß die Motoren nicht mehr mitkommen ...
Viktor
--------
Aufruf zum Projekt "Müll-freie Meere" - [reprap.org] -- Deutsche Facebook-Gruppe - [www.facebook.com]
Call for the project "garbage-free seas" - [reprap.org]
Viktor
--------
Aufruf zum Projekt "Müll-freie Meere" - [reprap.org] -- Deutsche Facebook-Gruppe - [www.facebook.com]
Call for the project "garbage-free seas" - [reprap.org]
|
Re: Motorgeräusch = SIgnaltute eines rückwärtsfahrenden LKWs 25. November 2019 09:53 |
Registrierungsdatum: 6 Jahre zuvor Beiträge: 29 |
Hallo Viktor,
ich habe mit den Jumpern nun rumgespielt, aber geändert hat das nichts. Leider kann ich mit deiner letzten Antwort nur wenig anfangen...
1) Wie kann ich herausfinden ob die Jumper "richtig erkannt" werden? Ich finde dazu irgendwie nischt
2) Das Mks gen 1.4 ist 12/24V ausgelegt. Ich habe das 12V 20A Netzteil vom Anet angeschlossen, welches zuvor ja genug Strom lieferte. Ich habe mich dabei an diesen Anschlussplan gehalten (https://drucktipps3d.de/wp-content/uploads/2018/11/Anschluesse.jpg), nur den Bltouch noch hinzugefügt, der erkannt und funktionstüchtig ist. Dementsprechend weiß ich nicht so Recht... Neben dem Anschluss für das Netzteil ist am Mks-board noch ein Ansteckplatz zum möglich einlöten vorhanden (sieht man auch im Bild), diesen habe ich aber nicht besetzt... Dran liegt es nicht (oder?), dass zweimal 12V daraufgehören?
Liebe Grüße, Gen
1-mal bearbeitet. Zuletzt am 25.11.19 09:55.
ich habe mit den Jumpern nun rumgespielt, aber geändert hat das nichts. Leider kann ich mit deiner letzten Antwort nur wenig anfangen...
1) Wie kann ich herausfinden ob die Jumper "richtig erkannt" werden? Ich finde dazu irgendwie nischt
2) Das Mks gen 1.4 ist 12/24V ausgelegt. Ich habe das 12V 20A Netzteil vom Anet angeschlossen, welches zuvor ja genug Strom lieferte. Ich habe mich dabei an diesen Anschlussplan gehalten (https://drucktipps3d.de/wp-content/uploads/2018/11/Anschluesse.jpg), nur den Bltouch noch hinzugefügt, der erkannt und funktionstüchtig ist. Dementsprechend weiß ich nicht so Recht... Neben dem Anschluss für das Netzteil ist am Mks-board noch ein Ansteckplatz zum möglich einlöten vorhanden (sieht man auch im Bild), diesen habe ich aber nicht besetzt... Dran liegt es nicht (oder?), dass zweimal 12V daraufgehören?
Liebe Grüße, Gen
1-mal bearbeitet. Zuletzt am 25.11.19 09:55.
|
Re: Motorgeräusch = SIgnaltute eines rückwärtsfahrenden LKWs 25. November 2019 10:43 |
Registrierungsdatum: 11 Jahre zuvor Beiträge: 3.969 |
Gibt es hier ein EEPROM, was man auslesen kann. Dann mit Repetier Host an den Kontroller gehen und Daten auslesen. Da sollten dann auch die Geschwindigkeiten der Motoren drin stehen.
Liebe Grüße aus Kaltenkirchen.
Frithjof
Meine Seite
[www.facebook.com]
Liebe Grüße aus Kaltenkirchen.
Frithjof
Meine Seite
[www.facebook.com]
|
Re: Motorgeräusch = SIgnaltute eines rückwärtsfahrenden LKWs 25. November 2019 13:40 |
Registrierungsdatum: 4 Jahre zuvor Beiträge: 199 |
Hi Gen,
ich glaube, du hast da Viktor falsch verstanden. Es geht nicht um die Spannung oder Leistung deines Netzteils, sondern um den Strom, der an den Motoren anliegt. Dieser wird auf den Steppertreibern mit einem kleinen Poti über eine Spannung eingestellt, wird Vref genannt. Liegt da zu viel an, werden die Motoren und die Treiber zu heiß, eventuell machen die Motoren seltsame Geräusche. Liegt da zu wenig an, ruckeln die Motoren von Step zu Step oder gehen gar nicht mehr. Wenn du das Messen kannst, sind 0,8 V ein guter Anfangswert, ansonsten muss man sich da mit etwas Gefühl rantasten: Gerade so hoch, dass der Motor schön dreht, aber nicht heiß wird, und dann ein klein wenig mehr.
Bei so einem Jaulen würde ich aber auch denken, dass da ebenfalls irgendwas mit Geschwindigkeit, Jerk und Beschleunigung nicht stimmt. Darum mal mit Repetier-Host verbinden und im EEPROM flott alle Werte auslesen (Wie ja schon Frithjof schrieb) und testweise drastisch reduzieren und dann erneut vorsichtig testen, zwischendurch immer mal mit dem Finger die Temperatur checken, sowohl am Motor als auch am Treiber.
Gruß,
Georg
ich glaube, du hast da Viktor falsch verstanden. Es geht nicht um die Spannung oder Leistung deines Netzteils, sondern um den Strom, der an den Motoren anliegt. Dieser wird auf den Steppertreibern mit einem kleinen Poti über eine Spannung eingestellt, wird Vref genannt. Liegt da zu viel an, werden die Motoren und die Treiber zu heiß, eventuell machen die Motoren seltsame Geräusche. Liegt da zu wenig an, ruckeln die Motoren von Step zu Step oder gehen gar nicht mehr. Wenn du das Messen kannst, sind 0,8 V ein guter Anfangswert, ansonsten muss man sich da mit etwas Gefühl rantasten: Gerade so hoch, dass der Motor schön dreht, aber nicht heiß wird, und dann ein klein wenig mehr.
Bei so einem Jaulen würde ich aber auch denken, dass da ebenfalls irgendwas mit Geschwindigkeit, Jerk und Beschleunigung nicht stimmt. Darum mal mit Repetier-Host verbinden und im EEPROM flott alle Werte auslesen (Wie ja schon Frithjof schrieb) und testweise drastisch reduzieren und dann erneut vorsichtig testen, zwischendurch immer mal mit dem Finger die Temperatur checken, sowohl am Motor als auch am Treiber.
Gruß,
Georg
|
Re: Motorgeräusch = SIgnaltute eines rückwärtsfahrenden LKWs 25. November 2019 14:54 |
Registrierungsdatum: 6 Jahre zuvor Beiträge: 29 |
Hallo ihr Lieben,
bin ganz überwältigt von Eurer Hilfe Vielen Dank.
Vielen Dank.
Also ich direkt zurück in die Firmware von Marlin und nochmal gechecked ob alles EEPROM-mäßige aktivert ist, dabei Reptier die Option grau blieb und nicht ausgewählt werden konnte. Firmware neu hochgeladen, EEPROM initaliziert und einmal ausgeschmissen.
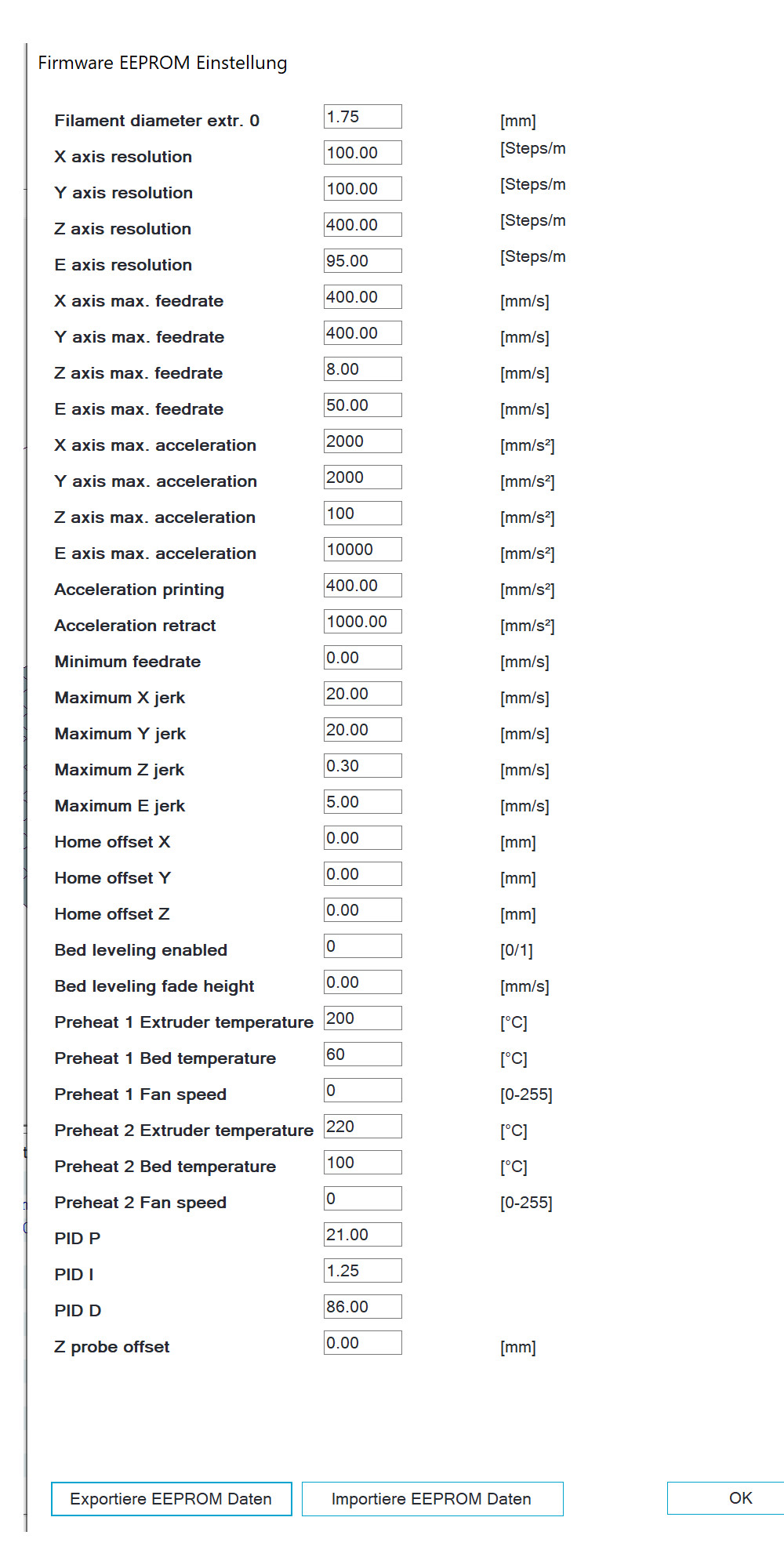
Die Datei habe ich einmal angehangen und auch als Foto. Leider werde ich daraus nicht so richtig schlau. Ich habe alle Axis nochmal durchprobiert dabei ist Z (wahrscheinlich weil zwei Motoren) am lautesten... Das mit dem Messen mach ich als nächstes.
Soweit, Liebe Grüße, Gen
1-mal bearbeitet. Zuletzt am 25.11.19 14:54.
bin ganz überwältigt von Eurer Hilfe
Vielen Dank.Also ich direkt zurück in die Firmware von Marlin und nochmal gechecked ob alles EEPROM-mäßige aktivert ist, dabei Reptier die Option grau blieb und nicht ausgewählt werden konnte. Firmware neu hochgeladen, EEPROM initaliziert und einmal ausgeschmissen.
Die Datei habe ich einmal angehangen und auch als Foto. Leider werde ich daraus nicht so richtig schlau. Ich habe alle Axis nochmal durchprobiert dabei ist Z (wahrscheinlich weil zwei Motoren) am lautesten... Das mit dem Messen mach ich als nächstes.
Soweit, Liebe Grüße, Gen
1-mal bearbeitet. Zuletzt am 25.11.19 14:54.
{kind=link}
{kind=link}
|
Re: Motorgeräusch = SIgnaltute eines rückwärtsfahrenden LKWs 26. November 2019 05:02 |
Registrierungsdatum: 5 Jahre zuvor Beiträge: 143 |
Du hast ein neues Board verbaut und die Stepper? sind vom Anet oder neu?,
Wenn die Stepper neu sind müssen diese erst mal eingestellt werden (Strom über Vref), google/youtube das mal wie man das richtig macht ohne das du etwas beschädigst, denn das kann unterschiedlich funktionieren zwischen den A4988 und den 8825!
Übrigens unterscheiden sich die 4988 von 8825 nicht nur beim einstellen sondern auch bei der Jumperung A4988 macht 16 MicroSteps, der 8825 32 MicroSteps bei 3 gesetzten Jumpern.
Das muss dann auch in Marlin angepasst werden oder man verwendet nur 2 Jumpern für die 8825 was sich aber dem Sinn der 8825 einen schöneren und ruhigeren Lauf zu haben entgegen stellt.
Ender 2:
Marlin 2.0x auf SKR mini V1.1 (32Bit)
alle Treiber 2208, Heizbett über Mosfet,
mit Bigtreetech Touchscreen TFT24 V1.1
auch eingehaust.
Cube EB V2,
Klipper auf Raspi 3B+
2 Y Stepper, 1 X Stepper, 2 Z Stepper
Druckbereich: 310x310x370,
230V Heizmatte, SSR, plangefrästes Alubett, magnetwechselbare Druckfläche
Bl-Touch, SKR 1.4 Turbo, TMC2226
Direkt Extruder Microswiss
Noch nicht ganz eingehaust.
Wenn die Stepper neu sind müssen diese erst mal eingestellt werden (Strom über Vref), google/youtube das mal wie man das richtig macht ohne das du etwas beschädigst, denn das kann unterschiedlich funktionieren zwischen den A4988 und den 8825!
Übrigens unterscheiden sich die 4988 von 8825 nicht nur beim einstellen sondern auch bei der Jumperung A4988 macht 16 MicroSteps, der 8825 32 MicroSteps bei 3 gesetzten Jumpern.
Das muss dann auch in Marlin angepasst werden oder man verwendet nur 2 Jumpern für die 8825 was sich aber dem Sinn der 8825 einen schöneren und ruhigeren Lauf zu haben entgegen stellt.
Ender 2:
Marlin 2.0x auf SKR mini V1.1 (32Bit)
alle Treiber 2208, Heizbett über Mosfet,
mit Bigtreetech Touchscreen TFT24 V1.1
auch eingehaust.
Cube EB V2,
Klipper auf Raspi 3B+
2 Y Stepper, 1 X Stepper, 2 Z Stepper
Druckbereich: 310x310x370,
230V Heizmatte, SSR, plangefrästes Alubett, magnetwechselbare Druckfläche
Bl-Touch, SKR 1.4 Turbo, TMC2226
Direkt Extruder Microswiss
Noch nicht ganz eingehaust.
|
Re: Motorgeräusch = SIgnaltute eines rückwärtsfahrenden LKWs 27. November 2019 04:49 |
Registrierungsdatum: 6 Jahre zuvor Beiträge: 29 |
Hallo, und nochmals vielen Dank.
@wintex: Neues Board und neue Treiber, habe jetzt alle auf 0,8V eingestellt. Auf den A4988 sind R100 Widerstände verlötet, was glaube ich für 0,1 Ohm steht, was eben dann zu dieser Einstellung führen sollte?! Tatsächlich waren sie vorher alle zwischen 1,2-1,9V eingestellt.
Dadurch hat sich auf jedenfall schon einmal das laute Geräusch gegeben, jedoch bewegen tuen sich die Motoren tortzdem nicht. Ob über Reptier oder manuel über das Eingabemenü des Diplays, ruckelt zwar der Motor, aber drehen/bewegen tat es nicht...
BIS ich nun an den steps/mm in der eeeprom zu resolution rumgespielt habe, diese standen auf 100 zu 100 zu 400 zu 95 zu jeweils erstmal alle auf 20 gestetzt habe. Nun funktionieren schonmal die Motoren, jedoch glaube ich dass ich dort ansonsten immer noch sehr viel Crap eingestellt habe. Ich mach mich jetzt ran rauszubekommen, welche Setting da gut wären.
Falls dazu jmd. einen Tip oder Ratschlag hat, wäre das ganz wunderbar.
Liebe Grüße, Gen
@wintex: Neues Board und neue Treiber, habe jetzt alle auf 0,8V eingestellt. Auf den A4988 sind R100 Widerstände verlötet, was glaube ich für 0,1 Ohm steht, was eben dann zu dieser Einstellung führen sollte?! Tatsächlich waren sie vorher alle zwischen 1,2-1,9V eingestellt.
Dadurch hat sich auf jedenfall schon einmal das laute Geräusch gegeben, jedoch bewegen tuen sich die Motoren tortzdem nicht. Ob über Reptier oder manuel über das Eingabemenü des Diplays, ruckelt zwar der Motor, aber drehen/bewegen tat es nicht...
BIS ich nun an den steps/mm in der eeeprom zu resolution rumgespielt habe, diese standen auf 100 zu 100 zu 400 zu 95 zu jeweils erstmal alle auf 20 gestetzt habe. Nun funktionieren schonmal die Motoren, jedoch glaube ich dass ich dort ansonsten immer noch sehr viel Crap eingestellt habe. Ich mach mich jetzt ran rauszubekommen, welche Setting da gut wären.
Falls dazu jmd. einen Tip oder Ratschlag hat, wäre das ganz wunderbar.
Liebe Grüße, Gen
|
Re: Motorgeräusch = SIgnaltute eines rückwärtsfahrenden LKWs 27. November 2019 13:54 |
Registrierungsdatum: 5 Jahre zuvor Beiträge: 143 |
Wie bist du auf 0,8v vref gekommen?
Das scheint mir zu niedrig für die a4988.
Setzt die steps/mm im eeprom wieder auf die richtigen Werte (100,100,400,95).
Eher sind die Jerk Werte X,Y zu hoch (würde erstmal 15 empfehlen).
Und jetzt stellst du vref jeweils um 0,1V höher bis die Motoren über das Display oder Repetier sauber laufen und legst dann nochmal 0,1V drauf.
Das ist für jede Achse individuell. Stell einfach erstmal X ein und danach die anderen.
Beachte das die Stepper Treiber aktiv am besten mit Lüfter gekühlt werden müssen im laufenden Betrieb (laufender Betrieb ist auch schon Motor ist zugeschaltet ohne Fahrweg)
Zu niedrig eingestellter Strom oder zu hohe Temperaturen der StepperTreiber führen im Druck-Betrieb zu Schichtversatz.
Ender 2:
Marlin 2.0x auf SKR mini V1.1 (32Bit)
alle Treiber 2208, Heizbett über Mosfet,
mit Bigtreetech Touchscreen TFT24 V1.1
auch eingehaust.
Cube EB V2,
Klipper auf Raspi 3B+
2 Y Stepper, 1 X Stepper, 2 Z Stepper
Druckbereich: 310x310x370,
230V Heizmatte, SSR, plangefrästes Alubett, magnetwechselbare Druckfläche
Bl-Touch, SKR 1.4 Turbo, TMC2226
Direkt Extruder Microswiss
Noch nicht ganz eingehaust.
Das scheint mir zu niedrig für die a4988.
Setzt die steps/mm im eeprom wieder auf die richtigen Werte (100,100,400,95).
Eher sind die Jerk Werte X,Y zu hoch (würde erstmal 15 empfehlen).
Und jetzt stellst du vref jeweils um 0,1V höher bis die Motoren über das Display oder Repetier sauber laufen und legst dann nochmal 0,1V drauf.
Das ist für jede Achse individuell. Stell einfach erstmal X ein und danach die anderen.
Beachte das die Stepper Treiber aktiv am besten mit Lüfter gekühlt werden müssen im laufenden Betrieb (laufender Betrieb ist auch schon Motor ist zugeschaltet ohne Fahrweg)
Zu niedrig eingestellter Strom oder zu hohe Temperaturen der StepperTreiber führen im Druck-Betrieb zu Schichtversatz.
Ender 2:
Marlin 2.0x auf SKR mini V1.1 (32Bit)
alle Treiber 2208, Heizbett über Mosfet,
mit Bigtreetech Touchscreen TFT24 V1.1
auch eingehaust.
Cube EB V2,
Klipper auf Raspi 3B+
2 Y Stepper, 1 X Stepper, 2 Z Stepper
Druckbereich: 310x310x370,
230V Heizmatte, SSR, plangefrästes Alubett, magnetwechselbare Druckfläche
Bl-Touch, SKR 1.4 Turbo, TMC2226
Direkt Extruder Microswiss
Noch nicht ganz eingehaust.
|
Re: Motorgeräusch = SIgnaltute eines rückwärtsfahrenden LKWs 30. November 2019 06:00 |
Registrierungsdatum: 6 Jahre zuvor Beiträge: 29 |
Hallo liebe Leute,
tut mir Leid, dass ein bisschen Zeit jetzt vergangen ist und ich mich hier nicht nochmal gemeldet habe. Folgender Stand:
Das die Motoren sich nicht bewegten lag daran, dass die Orginalmotoren vom Anet irgendwie anders Verkabelt sind bzw. die Farben andere Bedeutung haben. Deswegen bin ich jetzt erstmal dabei diese Pole herauszufinden und neu zu verkabeln. Ich melde mich sobald ich das geschafft habe (oder auf ein neues problem stoße ).
Einen schönen ersten Advent an alle Weihnachtsfans und allen anderen ein schönes Wochenende.
Gen
tut mir Leid, dass ein bisschen Zeit jetzt vergangen ist und ich mich hier nicht nochmal gemeldet habe. Folgender Stand:
Das die Motoren sich nicht bewegten lag daran, dass die Orginalmotoren vom Anet irgendwie anders Verkabelt sind bzw. die Farben andere Bedeutung haben. Deswegen bin ich jetzt erstmal dabei diese Pole herauszufinden und neu zu verkabeln. Ich melde mich sobald ich das geschafft habe (oder auf ein neues problem stoße
).Einen schönen ersten Advent an alle Weihnachtsfans und allen anderen ein schönes Wochenende.
Gen
In diesem Forum dürfen leider nur registrierte Teilnehmer schreiben.