Experimental firmware 059b-dc42 and web interface 0.77
Posted by dc42
|
Re: Experimental firmware 059b-dc42 and web interface 0.77 June 01, 2014 04:19AM |
Registered: 9 years ago Posts: 24 |
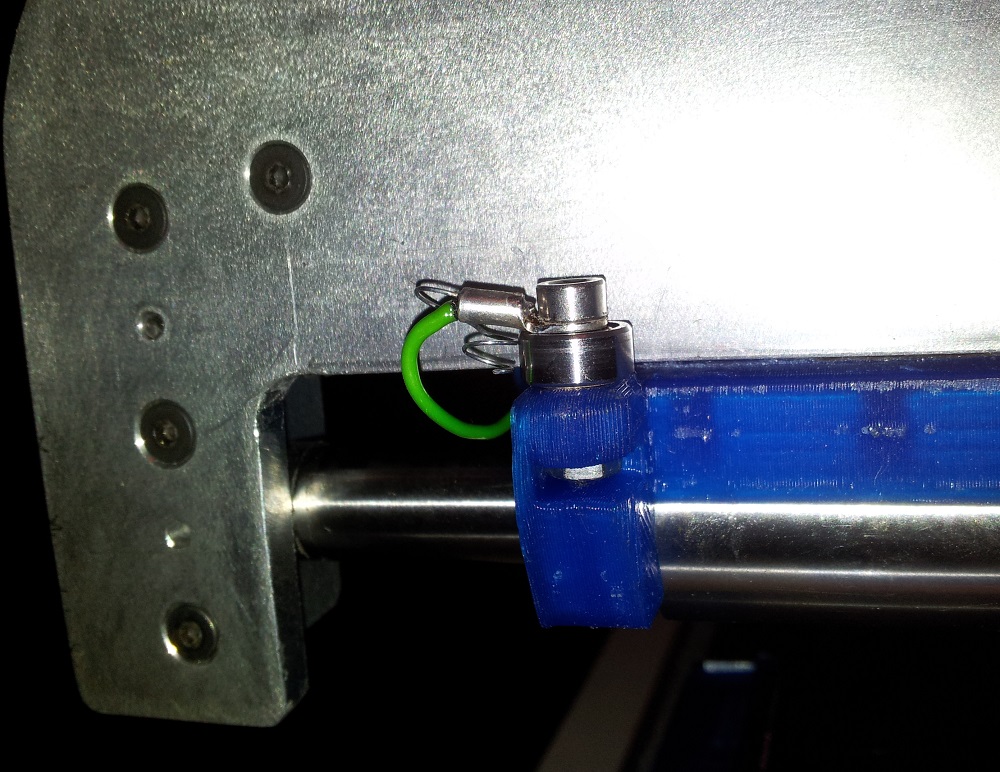
PS. Here's a pic of my Z switch ... contact (or not) between the anti-tilt bearing and my alloy arm, with a light spring that rubs on the outer race of the bearing so that the current doesn't need to flow through the balls and lubricant in the bearing. 30 ohms or less when closed. Of course, the nozzle does need to be snot-free at its tip, but hot snot does get squished out of the way pretty well.
Ken.
Ken.
|
Re: Experimental firmware 059b-dc42 and web interface 0.77 June 01, 2014 04:23AM |
Registered: 10 years ago Posts: 14,672 |
You can use the G31 command to set the height at which the switch is assumed to trigger. Another user implemented this and I merged his change into my firmware fork a few versions ago.
I tried that approach to height sensing a couple of weeks ago, but I didn't get it working well enough to my satisfaction. Contact would be lost, then be restored a moment later. I'm getting better results with differential IR sensing.
Edited 1 time(s). Last edit at 06/01/2014 04:30AM by dc42.
Large delta printer [miscsolutions.wordpress.com], E3D tool changer, Robotdigg SCARA printer, Crane Quad and Ormerod
Disclosure: I design Duet electronics and work on RepRapFirmware, [duet3d.com].
I tried that approach to height sensing a couple of weeks ago, but I didn't get it working well enough to my satisfaction. Contact would be lost, then be restored a moment later. I'm getting better results with differential IR sensing.
Edited 1 time(s). Last edit at 06/01/2014 04:30AM by dc42.
Large delta printer [miscsolutions.wordpress.com], E3D tool changer, Robotdigg SCARA printer, Crane Quad and Ormerod
Disclosure: I design Duet electronics and work on RepRapFirmware, [duet3d.com].
|
Re: Experimental firmware 059b-dc42 and web interface 0.77 June 01, 2014 04:39AM |
Registered: 9 years ago Posts: 24 |
Thanks, Dave, but perhaps a bit of a misunderstanding. After I've initially used the switch to set Z=0 at my X,Y homing position, I don't then want to reset Z. Instead, I'd like to be able to move to other X,Y positions and see at what Z positions the Z switch switches there, so that I can check whether the bed is level, and adjust if necessary.
Ken.
Ken.
|
Re: Experimental firmware 059b-dc42 and web interface 0.77 June 01, 2014 04:54AM |
Registered: 10 years ago Posts: 14,672 |
Ah, I see. That would require a further change. Perhaps S1 on a move command could work as now, but S2 activates the endstop but doesn't reset the position when it is hit.
EDIT: You could set up 4 XY points using M557 and run bed compensation. Then use M111 S2 to see what the 4 heights were.
Edited 2 time(s). Last edit at 06/01/2014 04:57AM by dc42.
Large delta printer [miscsolutions.wordpress.com], E3D tool changer, Robotdigg SCARA printer, Crane Quad and Ormerod
Disclosure: I design Duet electronics and work on RepRapFirmware, [duet3d.com].
EDIT: You could set up 4 XY points using M557 and run bed compensation. Then use M111 S2 to see what the 4 heights were.
Edited 2 time(s). Last edit at 06/01/2014 04:57AM by dc42.
Large delta printer [miscsolutions.wordpress.com], E3D tool changer, Robotdigg SCARA printer, Crane Quad and Ormerod
Disclosure: I design Duet electronics and work on RepRapFirmware, [duet3d.com].

{kind=link}
{kind=link}
Sorry, only registered users may post in this forum.