Minor updates: firmware 0.78r-dc42 and web interface 1.02
Posted by dc42
|
Minor updates: firmware 0.78r-dc42 and web interface 1.02 September 06, 2014 04:37PM |
Registered: 10 years ago Posts: 14,672 |
I've released these at [github.com] and [github.com].
Changes to the firmware since 0.78q:
Changes to web interface since 1.01:
As usual, only reprap.htm and reprap.js have changed from the previous version of the web interface, so those are the only files you need to upload. The new firmware will still work with the previous web interface, and vice versa.
Large delta printer [miscsolutions.wordpress.com], E3D tool changer, Robotdigg SCARA printer, Crane Quad and Ormerod
Disclosure: I design Duet electronics and work on RepRapFirmware, [duet3d.com].
Changes to the firmware since 0.78q:
Quote
The default S parameter for the PIDs is now 1.0 for all heaters. This is to make transitioning to my firmware easier on Ormerod 1 printers using the original ATX power supply.
Implemented the M570 command to allow the heater timeout to be adjusted. The default is 120 seconds.
Minor correction to the move lookahead code.
M81 command now waits for all moves to complete before turning the power off.
Changes to web interface since 1.01:
Quote
Fixed a problem with a missing variable in a cookie that caused problems for some users
Fixed an issue with graph sizing that caused the interface to no longer work in Chrome on Android
The file information displayed on clicking the info icon next to an SD card filename now includes the object height.
As usual, only reprap.htm and reprap.js have changed from the previous version of the web interface, so those are the only files you need to upload. The new firmware will still work with the previous web interface, and vice versa.
Large delta printer [miscsolutions.wordpress.com], E3D tool changer, Robotdigg SCARA printer, Crane Quad and Ormerod
Disclosure: I design Duet electronics and work on RepRapFirmware, [duet3d.com].
|
Re: Minor updates: firmware 0.78r-dc42 and web interface 1.02 September 07, 2014 03:20AM |
Registered: 10 years ago Posts: 147 |
|
Re: Minor updates: firmware 0.78r-dc42 and web interface 1.02 September 07, 2014 03:24AM |
Registered: 10 years ago Posts: 147 |
|
Re: Minor updates: firmware 0.78r-dc42 and web interface 1.02 September 07, 2014 03:58AM |
Registered: 10 years ago Posts: 147 |
my printing just wont start printing. i have T1 code. but in the web my head 1 are off after the bed met the temp.
; generated by Slic3r 1.0.0RC3 on 2014-08-30 at 11:32:14
; layer_height = 0.25
; perimeters = 3
; top_solid_layers = 3
; bottom_solid_layers = 3
; fill_density = 0.35
; perimeter_speed = 30
; infill_speed = 50
; travel_speed = 130
; nozzle_diameter = 0.5
; filament_diameter = 1.75
; extrusion_multiplier = 1
; perimeters extrusion width = 0.50mm
; infill extrusion width = 0.40mm
; solid infill extrusion width = 0.25mm
; top infill extrusion width = 0.25mm
; first layer extrusion width = 0.45mm
G21 ; set units to millimeters
M190 S60 ; wait for bed temperature to be reached
M104 S185 ; set temperature
T1
M107
G28
M109 S173 ; wait for temperature to be reached
G90 ; use absolute coordinates
M83 ; use relative distances for extrusion
Edited 1 time(s). Last edit at 09/07/2014 04:02AM by antlvk.
; generated by Slic3r 1.0.0RC3 on 2014-08-30 at 11:32:14
; layer_height = 0.25
; perimeters = 3
; top_solid_layers = 3
; bottom_solid_layers = 3
; fill_density = 0.35
; perimeter_speed = 30
; infill_speed = 50
; travel_speed = 130
; nozzle_diameter = 0.5
; filament_diameter = 1.75
; extrusion_multiplier = 1
; perimeters extrusion width = 0.50mm
; infill extrusion width = 0.40mm
; solid infill extrusion width = 0.25mm
; top infill extrusion width = 0.25mm
; first layer extrusion width = 0.45mm
G21 ; set units to millimeters
M190 S60 ; wait for bed temperature to be reached
M104 S185 ; set temperature
T1
M107
G28
M109 S173 ; wait for temperature to be reached
G90 ; use absolute coordinates
M83 ; use relative distances for extrusion
Edited 1 time(s). Last edit at 09/07/2014 04:02AM by antlvk.
|
Re: Minor updates: firmware 0.78r-dc42 and web interface 1.02 September 07, 2014 05:10AM |
Registered: 10 years ago Posts: 14,672 |
If it happens again, check the message log for error messages. It could be that with the PID parameters you are using, the head is taking more than 120 seconds to get up to temperature.
Large delta printer [miscsolutions.wordpress.com], E3D tool changer, Robotdigg SCARA printer, Crane Quad and Ormerod
Disclosure: I design Duet electronics and work on RepRapFirmware, [duet3d.com].
Large delta printer [miscsolutions.wordpress.com], E3D tool changer, Robotdigg SCARA printer, Crane Quad and Ormerod
Disclosure: I design Duet electronics and work on RepRapFirmware, [duet3d.com].
|
Re: Minor updates: firmware 0.78r-dc42 and web interface 1.02 September 07, 2014 05:24AM |
Registered: 9 years ago Posts: 12 |
With this firmware and the previous 0.78 versions I have an issue after the print finishes. The hot end temperature changes over from 'active' to 'standby' and there is no way to change the temperature after that point without powering off the unit. Embedded temperature commands in the gceode file are ignored. Is powering off and on the only option or have I missed something fundamental?
Dave
Ormerod V1
Edited 1 time(s). Last edit at 09/07/2014 05:25AM by Fatlab.
Dave
Ormerod V1
Edited 1 time(s). Last edit at 09/07/2014 05:25AM by Fatlab.
|
Re: Minor updates: firmware 0.78r-dc42 and web interface 1.02 September 07, 2014 06:10AM |
Registered: 10 years ago Posts: 14,672 |
To make head 1 active again, either click the Head 1 text in the web interface, or send the T1 command. You may wish to put a T1 command in your slic3r start gcode.
Large delta printer [miscsolutions.wordpress.com], E3D tool changer, Robotdigg SCARA printer, Crane Quad and Ormerod
Disclosure: I design Duet electronics and work on RepRapFirmware, [duet3d.com].
Large delta printer [miscsolutions.wordpress.com], E3D tool changer, Robotdigg SCARA printer, Crane Quad and Ormerod
Disclosure: I design Duet electronics and work on RepRapFirmware, [duet3d.com].
|
Re: Minor updates: firmware 0.78r-dc42 and web interface 1.02 September 07, 2014 10:33AM |
Registered: 10 years ago Posts: 28 |
Dave
You mention the S parameter for the PID control 'The default S parameter for the PIDs is now 1.0 for all heaters'
Is this something we can change and if so does it allow the Intergral action to be individually set?
I ask the question because the hot end on my printer is taking well over the 120s default timeout and I've set it to 300s to be sure it does not cause a shutdown before printing starts.
The shape of the graph indicates to me that it is the 'I' term that is causing my problem although when it eventually reaches setpoint it holds well.
Ray
You mention the S parameter for the PID control 'The default S parameter for the PIDs is now 1.0 for all heaters'
Is this something we can change and if so does it allow the Intergral action to be individually set?
I ask the question because the hot end on my printer is taking well over the 120s default timeout and I've set it to 300s to be sure it does not cause a shutdown before printing starts.
The shape of the graph indicates to me that it is the 'I' term that is causing my problem although when it eventually reaches setpoint it holds well.
Ray
|
Re: Minor updates: firmware 0.78r-dc42 and web interface 1.02 September 07, 2014 12:25PM |
Registered: 10 years ago Posts: 14,672 |
Hi Ray,
See [reprap.org] for how to set the S parameter and all the other parameters. If you send M301 H1 with no parameters, then the firmware will return the current parameters, and you can view this response in the Message Log tab of the web interface.
If the heater is heating rapidly to within about 30C (the B-value) of the target temperature, and then the heating rate suddenly slows down and it takes a long time to reach the target, then it is probably the T parameter that you need to increase. To calculate the theoretical ideal value of the T-parameter:
- Heat the hot end to working temperature and wait for the temperature to stabilise
- Send M122 and look in the response in the message log for the value of Heater 1 I-accumulator
- Divide the value you find there by the difference between the hot end temperature and room temperature
On my system, with the hot end at 185C the I-accumulator is about 60. Dividing this by (185 - 25) gives a theoretical T term of 0.375. The default is 0.25. Too high a T term will cause the temperature to overshoot.
Don't try adjusting both S and T at the same time because they interact. There is little point in increasing S beyond 1.0.
Edited 1 time(s). Last edit at 09/07/2014 12:27PM by dc42.
Large delta printer [miscsolutions.wordpress.com], E3D tool changer, Robotdigg SCARA printer, Crane Quad and Ormerod
Disclosure: I design Duet electronics and work on RepRapFirmware, [duet3d.com].
See [reprap.org] for how to set the S parameter and all the other parameters. If you send M301 H1 with no parameters, then the firmware will return the current parameters, and you can view this response in the Message Log tab of the web interface.
If the heater is heating rapidly to within about 30C (the B-value) of the target temperature, and then the heating rate suddenly slows down and it takes a long time to reach the target, then it is probably the T parameter that you need to increase. To calculate the theoretical ideal value of the T-parameter:
- Heat the hot end to working temperature and wait for the temperature to stabilise
- Send M122 and look in the response in the message log for the value of Heater 1 I-accumulator
- Divide the value you find there by the difference between the hot end temperature and room temperature
On my system, with the hot end at 185C the I-accumulator is about 60. Dividing this by (185 - 25) gives a theoretical T term of 0.375. The default is 0.25. Too high a T term will cause the temperature to overshoot.
Don't try adjusting both S and T at the same time because they interact. There is little point in increasing S beyond 1.0.
Edited 1 time(s). Last edit at 09/07/2014 12:27PM by dc42.
Large delta printer [miscsolutions.wordpress.com], E3D tool changer, Robotdigg SCARA printer, Crane Quad and Ormerod
Disclosure: I design Duet electronics and work on RepRapFirmware, [duet3d.com].
|
Re: Minor updates: firmware 0.78r-dc42 and web interface 1.02 September 07, 2014 01:05PM |
Registered: 10 years ago Posts: 28 |
|
Re: Minor updates: firmware 0.78r-dc42 and web interface 1.02 September 07, 2014 01:07PM |
Registered: 10 years ago Posts: 28 |
|
Re: Minor updates: firmware 0.78r-dc42 and web interface 1.02 September 07, 2014 01:08PM |
Registered: 9 years ago Posts: 73 |
Hi,
I have problems with Y axis
I home all axes, and it works corectly. The movement is ok, no belt sliping or something
but when i send G32 command.
The bed seems not to be on right coordinates. it is at y180 to 190 on P1 when it should be at y160 and when it moves to P2 the bed moves even further to almoust the end.
But the bed should be at y175. So the x axis crashes in bed.
It's shoving 160, but x axis is over the edge of bed
This started happening when i flashed 0.78q, so i flashed 0.78r and it's still happening
I attached copy of config.g
Edited 2 time(s). Last edit at 09/07/2014 02:32PM by Mercnik.
I have problems with Y axis
I home all axes, and it works corectly. The movement is ok, no belt sliping or something
but when i send G32 command.
The bed seems not to be on right coordinates. it is at y180 to 190 on P1 when it should be at y160 and when it moves to P2 the bed moves even further to almoust the end.
But the bed should be at y175. So the x axis crashes in bed.
It's shoving 160, but x axis is over the edge of bed
This started happening when i flashed 0.78q, so i flashed 0.78r and it's still happening
I attached copy of config.g
Edited 2 time(s). Last edit at 09/07/2014 02:32PM by Mercnik.
|
Re: Minor updates: firmware 0.78r-dc42 and web interface 1.02 September 07, 2014 02:18PM |
Registered: 10 years ago Posts: 14,672 |
RayC40, yes, the default I term in my fork is 0.1. If you increase it, you will probably get overshoot and at least some oscillation.
Edited 1 time(s). Last edit at 09/07/2014 02:20PM by dc42.
Large delta printer [miscsolutions.wordpress.com], E3D tool changer, Robotdigg SCARA printer, Crane Quad and Ormerod
Disclosure: I design Duet electronics and work on RepRapFirmware, [duet3d.com].
Edited 1 time(s). Last edit at 09/07/2014 02:20PM by dc42.
Large delta printer [miscsolutions.wordpress.com], E3D tool changer, Robotdigg SCARA printer, Crane Quad and Ormerod
Disclosure: I design Duet electronics and work on RepRapFirmware, [duet3d.com].
|
Re: Minor updates: firmware 0.78r-dc42 and web interface 1.02 September 07, 2014 02:33PM |
Registered: 10 years ago Posts: 14,672 |
Quote
Mercnik
Hi,
I have problems with Y axis
I home all axes, and it works corectly. The movement is ok, no belt sliping or something
but when i send G32 command.
The bed seems not to be on right coordinates. it is at y180 to 190 on P1 and when it moves to P2 the bed moves even further to almoust the end.
But the bed should be at y175. So the x axis crashes in bed.
It's shoving 160, but x axis is over the edge of bed
Your config.g file shows that in the M557 commands you are using XY coordinates (55,0), (55,160), (220,160) and (220,0) for the bed compensation points. Are those the points you intended to use, or is 220mm off the edge of the bed? You need to choose the XY coordinates so that they are in-range and they place the proximity sensor head near the centres of the white targets and not too close to the bed clips.
You don't have any M208 commands in your config.g.file, so the firmware will assume the defaults. These are that X goes from 0 to +220mm, and Y and Z each go from 0 to +200mm.
Large delta printer [miscsolutions.wordpress.com], E3D tool changer, Robotdigg SCARA printer, Crane Quad and Ormerod
Disclosure: I design Duet electronics and work on RepRapFirmware, [duet3d.com].
|
Re: Minor updates: firmware 0.78r-dc42 and web interface 1.02 September 07, 2014 02:43PM |
Registered: 9 years ago Posts: 73 |
The coordinates are set so only now. X is ok, the problem is with y.
I have the probe over center of paper at (55,0), (55,175), (220,175) and (220,0).
But the problem is that the y axis-bed is not moving corectly at bed compensation.
At p0 is ok, P1 x is ok, but y is around 190-almoust at the edge, when head moves to p2 bed moves (looks like sliping) even further.
But if i use commands on webinterface, bed moves corectly- i messured it.
When x is moving from P1 to P2, interface shovs Y-7.6.
Edited 1 time(s). Last edit at 09/07/2014 02:46PM by Mercnik.
I have the probe over center of paper at (55,0), (55,175), (220,175) and (220,0).
But the problem is that the y axis-bed is not moving corectly at bed compensation.
At p0 is ok, P1 x is ok, but y is around 190-almoust at the edge, when head moves to p2 bed moves (looks like sliping) even further.
But if i use commands on webinterface, bed moves corectly- i messured it.
When x is moving from P1 to P2, interface shovs Y-7.6.
Edited 1 time(s). Last edit at 09/07/2014 02:46PM by Mercnik.
|
Re: Minor updates: firmware 0.78r-dc42 and web interface 1.02 September 07, 2014 02:55PM |
Registered: 9 years ago Posts: 73 |
|
Re: Minor updates: firmware 0.78r-dc42 and web interface 1.02 September 07, 2014 03:21PM |
Registered: 10 years ago Posts: 14,672 |
Quote
Mercnik
I tried it again
And as soon as it moves from P0 to P1.
Y coordinates jump from 0 to -7.5.
And then it drives to y160, but is 7.5 more
From P1 to P2 y also moves slightly, for at least 5mm
At P3 it shows X220 y-7.5
Try commenting out the M556 axis compensation line in config.g, then reset the Duet, home all axes and run G32 again.
Edited 1 time(s). Last edit at 09/07/2014 03:21PM by dc42.
Large delta printer [miscsolutions.wordpress.com], E3D tool changer, Robotdigg SCARA printer, Crane Quad and Ormerod
Disclosure: I design Duet electronics and work on RepRapFirmware, [duet3d.com].
|
Re: Minor updates: firmware 0.78r-dc42 and web interface 1.02 September 07, 2014 03:42PM |
Registered: 9 years ago Posts: 73 |
|
Re: Minor updates: firmware 0.78r-dc42 and web interface 1.02 September 07, 2014 04:23PM |
Registered: 10 years ago Posts: 14,672 |
It sounds very much like an axis compensation issue to me. Are you sure you are not executing another M556 command somewhere else, e.g. in your setbed.g file?
You could try homing the axes, then execute M556 directly from the web interface or Pronterface and check the response in the message log to make sure the axis compensation values are all zero. Then send G32 directly from the web interface or Pronterface.
PS: you have M558 P2 in config.g. Are you really using a modulated IR sensor?
Edited 2 time(s). Last edit at 09/07/2014 04:25PM by dc42.
Large delta printer [miscsolutions.wordpress.com], E3D tool changer, Robotdigg SCARA printer, Crane Quad and Ormerod
Disclosure: I design Duet electronics and work on RepRapFirmware, [duet3d.com].
You could try homing the axes, then execute M556 directly from the web interface or Pronterface and check the response in the message log to make sure the axis compensation values are all zero. Then send G32 directly from the web interface or Pronterface.
PS: you have M558 P2 in config.g. Are you really using a modulated IR sensor?
Edited 2 time(s). Last edit at 09/07/2014 04:25PM by dc42.
Large delta printer [miscsolutions.wordpress.com], E3D tool changer, Robotdigg SCARA printer, Crane Quad and Ormerod
Disclosure: I design Duet electronics and work on RepRapFirmware, [duet3d.com].
|
Re: Minor updates: firmware 0.78r-dc42 and web interface 1.02 September 07, 2014 04:51PM |
Registered: 9 years ago Posts: 73 |
I have checked sys files for M556 code. but didn't find any
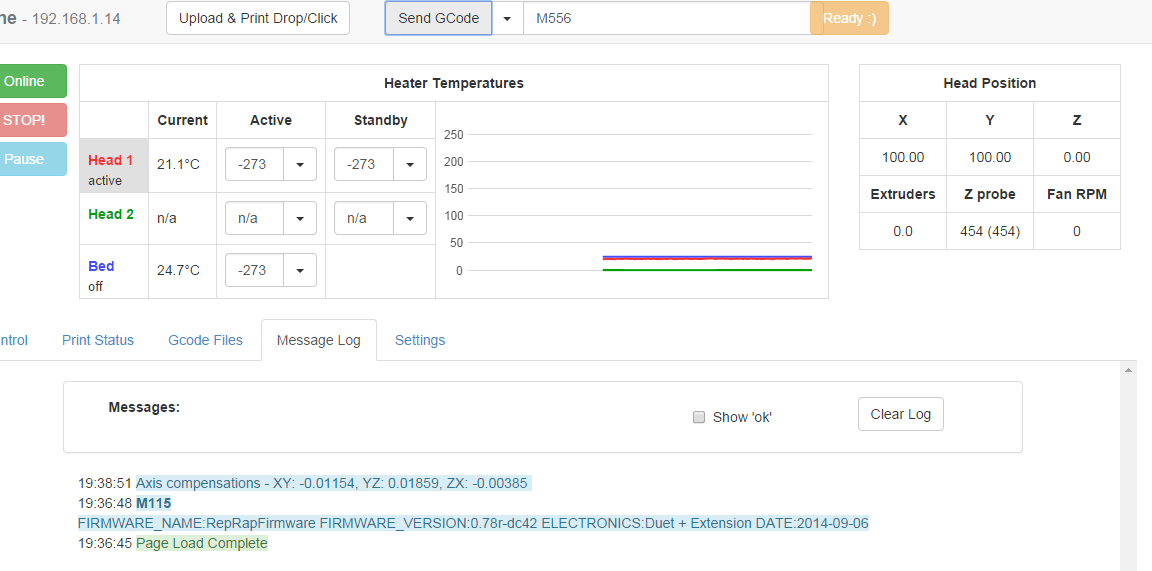
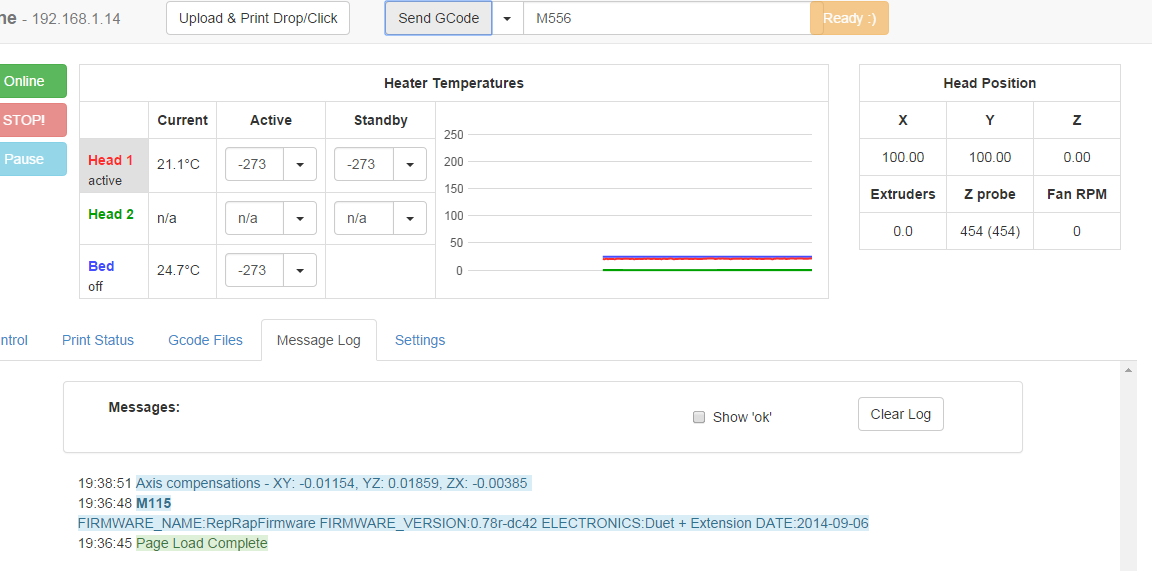
send M556 command, and got response -- Axis compensations - XY: -0.01154, YZ: 0.01859, ZX: -0.00385
Where could the command be.
I don't have a setbed file
Yes i have a modulated IR probe-4pins ( RRP send wrong one, from ormerod 2, it was just a week before 2 came out
Edited 3 time(s). Last edit at 09/07/2014 05:03PM by Mercnik.
send M556 command, and got response -- Axis compensations - XY: -0.01154, YZ: 0.01859, ZX: -0.00385
Where could the command be.
I don't have a setbed file
Yes i have a modulated IR probe-4pins ( RRP send wrong one, from ormerod 2, it was just a week before 2 came out
Edited 3 time(s). Last edit at 09/07/2014 05:03PM by Mercnik.
|
Re: Minor updates: firmware 0.78r-dc42 and web interface 1.02 September 08, 2014 03:49AM |
Registered: 10 years ago Posts: 665 |
|
Re: Minor updates: firmware 0.78r-dc42 and web interface 1.02 September 08, 2014 05:31AM |
Registered: 9 years ago Posts: 73 |
|
Re: Minor updates: firmware 0.78r-dc42 and web interface 1.02 September 08, 2014 07:12AM |
Registered: 10 years ago Posts: 14,672 |
Quote
Mercnik
I have checked sys files for M556 code. but didn't find any
send M556 command, and got response -- Axis compensations - XY: -0.01154, YZ: 0.01859, ZX: -0.00385
Where could the command be.
I don't have a setbed file
You have these commands in config.g:
G31 Z2.20 P553 ; Set the probe height and threshold (deliberately too high to avoid bed crash on setup) M556 S78 X-0.9 Y1.45 Z-0.3 ; Put your axis compensation here
First, did you reset the duet after commenting out the M556 command in config.g and uploading or copying the modified file to the SD card?
Second, you have the comment "deliberately too high to avoid bed crash on setup" against the G31 command. If by this you mean you have set the Z parameter too high, then of course this will cause the Z axis homing to be too high.
Large delta printer [miscsolutions.wordpress.com], E3D tool changer, Robotdigg SCARA printer, Crane Quad and Ormerod
Disclosure: I design Duet electronics and work on RepRapFirmware, [duet3d.com].
|
Re: Minor updates: firmware 0.78r-dc42 and web interface 1.02 September 08, 2014 08:19AM |
Registered: 9 years ago Posts: 73 |
Yes i have reset the duet several times, after uploading and commenting out M556 command.
The --- G31 Z2.20 P553 ; Set the probe height and threshold (deliberately too high to avoid bed crash on setup)---
command line is from original RRP SD ormerod1 file.
Should i cooment it out? I think similar line was in old files (0.78)
But homing of all axes works fine. The problem is only when i send G32 command. then I have problem as described above in previous posts.
The --- G31 Z2.20 P553 ; Set the probe height and threshold (deliberately too high to avoid bed crash on setup)---
command line is from original RRP SD ormerod1 file.
Should i cooment it out? I think similar line was in old files (0.78)
But homing of all axes works fine. The problem is only when i send G32 command. then I have problem as described above in previous posts.
|
Re: Minor updates: firmware 0.78r-dc42 and web interface 1.02 September 08, 2014 08:57AM |
Registered: 10 years ago Posts: 14,672 |
Mercnik, you need to adjust the G31 parameters in that line in config.g to suit your particular machine. Otherwise, Z-homing will not be accurate. See [reprappro.com].
Large delta printer [miscsolutions.wordpress.com], E3D tool changer, Robotdigg SCARA printer, Crane Quad and Ormerod
Disclosure: I design Duet electronics and work on RepRapFirmware, [duet3d.com].
Large delta printer [miscsolutions.wordpress.com], E3D tool changer, Robotdigg SCARA printer, Crane Quad and Ormerod
Disclosure: I design Duet electronics and work on RepRapFirmware, [duet3d.com].
|
Re: Minor updates: firmware 0.78r-dc42 and web interface 1.02 September 08, 2014 09:56AM |
Registered: 9 years ago Posts: 73 |
Yes i did. This are my parameters G31 Z2.20 P553. The ''Set the probe height and threshold (deliberately too high to avoid bed crash on setup)''
is just a sentence that remained from RRp original file.
And again, all axes home normaly.
The problem is just with G32 command.
As i described. THe bed moves to much.
As soon as probe measures first point P0 (x55 y0), and starts moving up,
Y coordinate on webinterface jumps on value -7.48. But the bed doesn't move.
So when the bed moves, that the probe can measure point 2 -P1 it moves more (probably 160+7.48)- i've set 160 to avoid crash-so probe stayes above paper even do, bed moves to far.
And when head moves to measure point 3- P2 (the bed should stay as it is-same y coordinates), but the bed moves-y motor turns for cca. half turn.
And finaly, when it moves to point 4 -P3, interface shovs y coordinate as 0, but it is not- it moved for 15mm.
All x coordinate values are corect, as are the z values.
is just a sentence that remained from RRp original file.
And again, all axes home normaly.
The problem is just with G32 command.
As i described. THe bed moves to much.
As soon as probe measures first point P0 (x55 y0), and starts moving up,
Y coordinate on webinterface jumps on value -7.48. But the bed doesn't move.
So when the bed moves, that the probe can measure point 2 -P1 it moves more (probably 160+7.48)- i've set 160 to avoid crash-so probe stayes above paper even do, bed moves to far.
And when head moves to measure point 3- P2 (the bed should stay as it is-same y coordinates), but the bed moves-y motor turns for cca. half turn.
And finaly, when it moves to point 4 -P3, interface shovs y coordinate as 0, but it is not- it moved for 15mm.
All x coordinate values are corect, as are the z values.
|
Re: Minor updates: firmware 0.78r-dc42 and web interface 1.02 September 08, 2014 11:15AM |
Registered: 10 years ago Posts: 14,672 |
Very strange. Something is definitely setting up axis compensation, because the values reported by M556 (with no parameters) should all be reported as zero if you have no axis compensation configured. I have just checked this on my own Ormerod, and the values are all zero as expected. I also checked that the code initialises all 3 axis compensation values to zero..
Large delta printer [miscsolutions.wordpress.com], E3D tool changer, Robotdigg SCARA printer, Crane Quad and Ormerod
Disclosure: I design Duet electronics and work on RepRapFirmware, [duet3d.com].
Large delta printer [miscsolutions.wordpress.com], E3D tool changer, Robotdigg SCARA printer, Crane Quad and Ormerod
Disclosure: I design Duet electronics and work on RepRapFirmware, [duet3d.com].
|
Re: Minor updates: firmware 0.78r-dc42 and web interface 1.02 September 08, 2014 11:51AM |
Registered: 9 years ago Posts: 73 |
Hmm.
And what can i do?
Do you think flashing again your 0.78r version would help?
I did it twice allready.
Or should i try flashing 0.78b from RRP?
I looked again in all sys files on SD, but no M556 command.
I tried setting all M556 values to zero, no change.
But 7.5mm is to much even if M556 is trigered somehov?
And then all axes would compensate, but only Y ax (bed) moves.
As soon as z motor is triggered, the Y value on webinterface, jumps to (-7.5)
Could this happen becouse of electricity jump?? radiation?? (don't know the expression in english), over to duet from Z motor???
Becouse of faulty wire (do not see anything wrong with wires or motor).
It is the same if I try to run G32 command over pronterface.
And what can i do?
Do you think flashing again your 0.78r version would help?
I did it twice allready.
Or should i try flashing 0.78b from RRP?
I looked again in all sys files on SD, but no M556 command.
I tried setting all M556 values to zero, no change.
But 7.5mm is to much even if M556 is trigered somehov?
And then all axes would compensate, but only Y ax (bed) moves.
As soon as z motor is triggered, the Y value on webinterface, jumps to (-7.5)
Could this happen becouse of electricity jump?? radiation?? (don't know the expression in english), over to duet from Z motor???
Becouse of faulty wire (do not see anything wrong with wires or motor).
It is the same if I try to run G32 command over pronterface.
|
Re: Minor updates: firmware 0.78r-dc42 and web interface 1.02 September 08, 2014 01:04PM |
Registered: 10 years ago Posts: 14,672 |
I agree, even with those axis compensation values, it shouldn't move as much as 7.5mm. Try this:
1. Home all axes.
2. Do G1 X100 Y100
3. Run M556 and see what the axis compensation values are shown as.
4. Move the had in the Z direction a little and see if X or Y is reported as moving (or actually moves).
5. Run M556 S78 X0 Y0 Z0
6. Run M556 by itself and check that all 3 compensation values are reported as 0.
7. Move the Z axis again and see if there is any X or Y actual or reported movement.
If you like, try re-flashing 0.78r or flashing RRP 0.78b.
Large delta printer [miscsolutions.wordpress.com], E3D tool changer, Robotdigg SCARA printer, Crane Quad and Ormerod
Disclosure: I design Duet electronics and work on RepRapFirmware, [duet3d.com].
1. Home all axes.
2. Do G1 X100 Y100
3. Run M556 and see what the axis compensation values are shown as.
4. Move the had in the Z direction a little and see if X or Y is reported as moving (or actually moves).
5. Run M556 S78 X0 Y0 Z0
6. Run M556 by itself and check that all 3 compensation values are reported as 0.
7. Move the Z axis again and see if there is any X or Y actual or reported movement.
If you like, try re-flashing 0.78r or flashing RRP 0.78b.
Large delta printer [miscsolutions.wordpress.com], E3D tool changer, Robotdigg SCARA printer, Crane Quad and Ormerod
Disclosure: I design Duet electronics and work on RepRapFirmware, [duet3d.com].
|
Re: Minor updates: firmware 0.78r-dc42 and web interface 1.02 September 08, 2014 02:01PM |
Registered: 9 years ago Posts: 73 |
Ok. i did all that, except reflashing.
Axis compenstaion values are attached.
I don't understand why There is still compenstaion, if i commented the command out?
After M556 S78 X0 Y0 Z0, values show 0.
I tried homing all axes, and G32 command and Y does not move.
But ofcourse after turning it off and back on it's the same old story.
What can I do, if reflashing several times did not help?
I tried to set values in config to 0, then it is ok. I leaved the '';'' infront of M556 command, but it still reads it. Why??
I tried to set y value to 0.725 so 1/2 what i had before, and the interface now shows y value -3.74 when it should be 0.
So this is also half from -7.48.
Why are movements so big? And why this was not happening before?
If the compenstaion values are so wrong (to large), this should be happening before.
I will set them to 0 for now, and try to print something to see if the wals are ok.
But the computer keeps making USB connect/disconnect sound again, nothing else is connected to other USB's.
Even during the print is connecting/disconecting all the time.
It's not beeing recognized by device manager or pronterface.
Edited 2 time(s). Last edit at 09/08/2014 03:12PM by Mercnik.
Axis compenstaion values are attached.
I don't understand why There is still compenstaion, if i commented the command out?
After M556 S78 X0 Y0 Z0, values show 0.
I tried homing all axes, and G32 command and Y does not move.
But ofcourse after turning it off and back on it's the same old story.
What can I do, if reflashing several times did not help?
I tried to set values in config to 0, then it is ok. I leaved the '';'' infront of M556 command, but it still reads it. Why??
I tried to set y value to 0.725 so 1/2 what i had before, and the interface now shows y value -3.74 when it should be 0.
So this is also half from -7.48.
Why are movements so big? And why this was not happening before?
If the compenstaion values are so wrong (to large), this should be happening before.
I will set them to 0 for now, and try to print something to see if the wals are ok.
But the computer keeps making USB connect/disconnect sound again, nothing else is connected to other USB's.
Even during the print is connecting/disconecting all the time.
It's not beeing recognized by device manager or pronterface.
Edited 2 time(s). Last edit at 09/08/2014 03:12PM by Mercnik.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Sorry, only registered users may post in this forum.