RepRap Delta Übersicht
Posted by wakeer
|
RepRap Delta Übersicht October 17, 2010 12:44PM |
Registered: 13 years ago Posts: 470 |
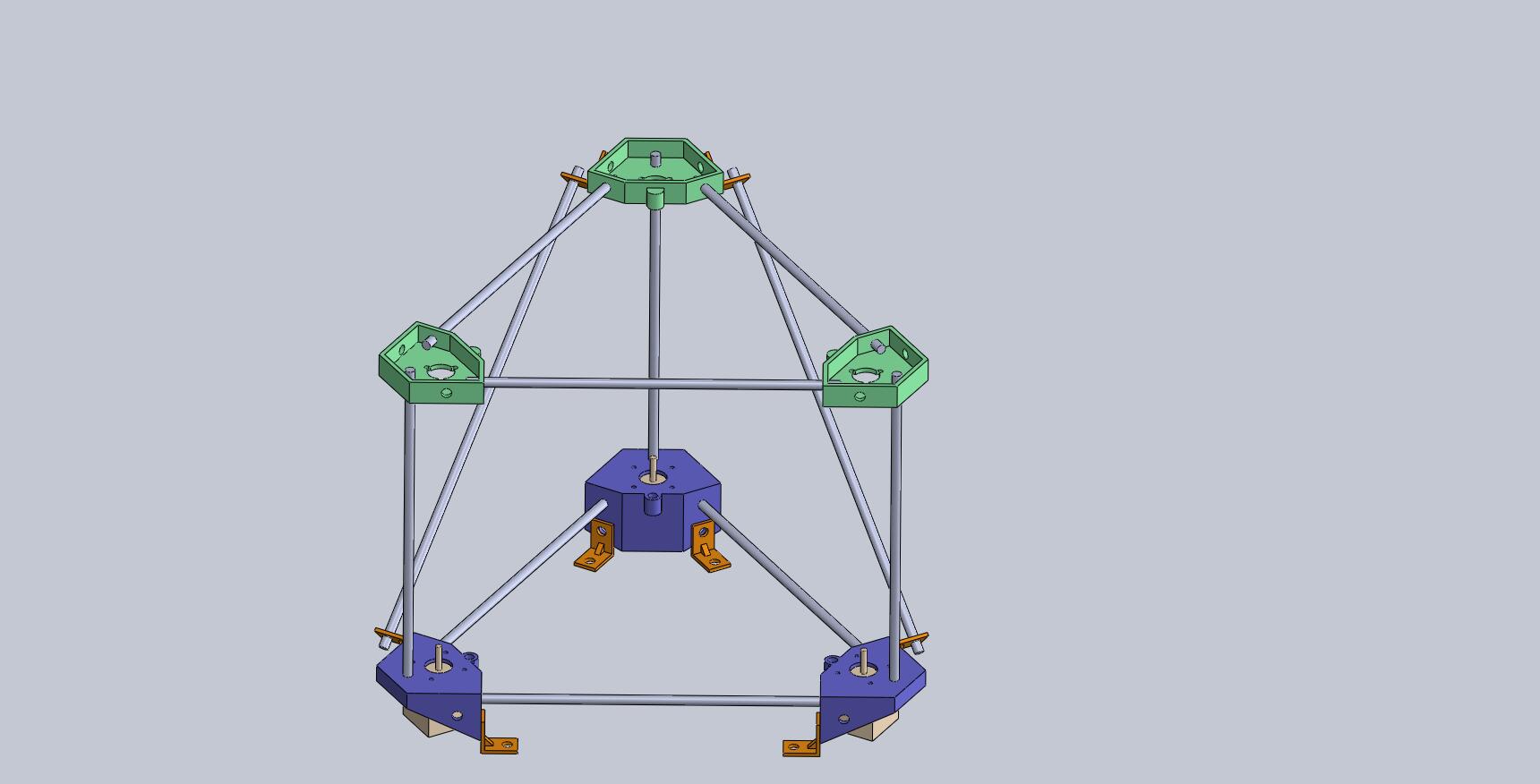
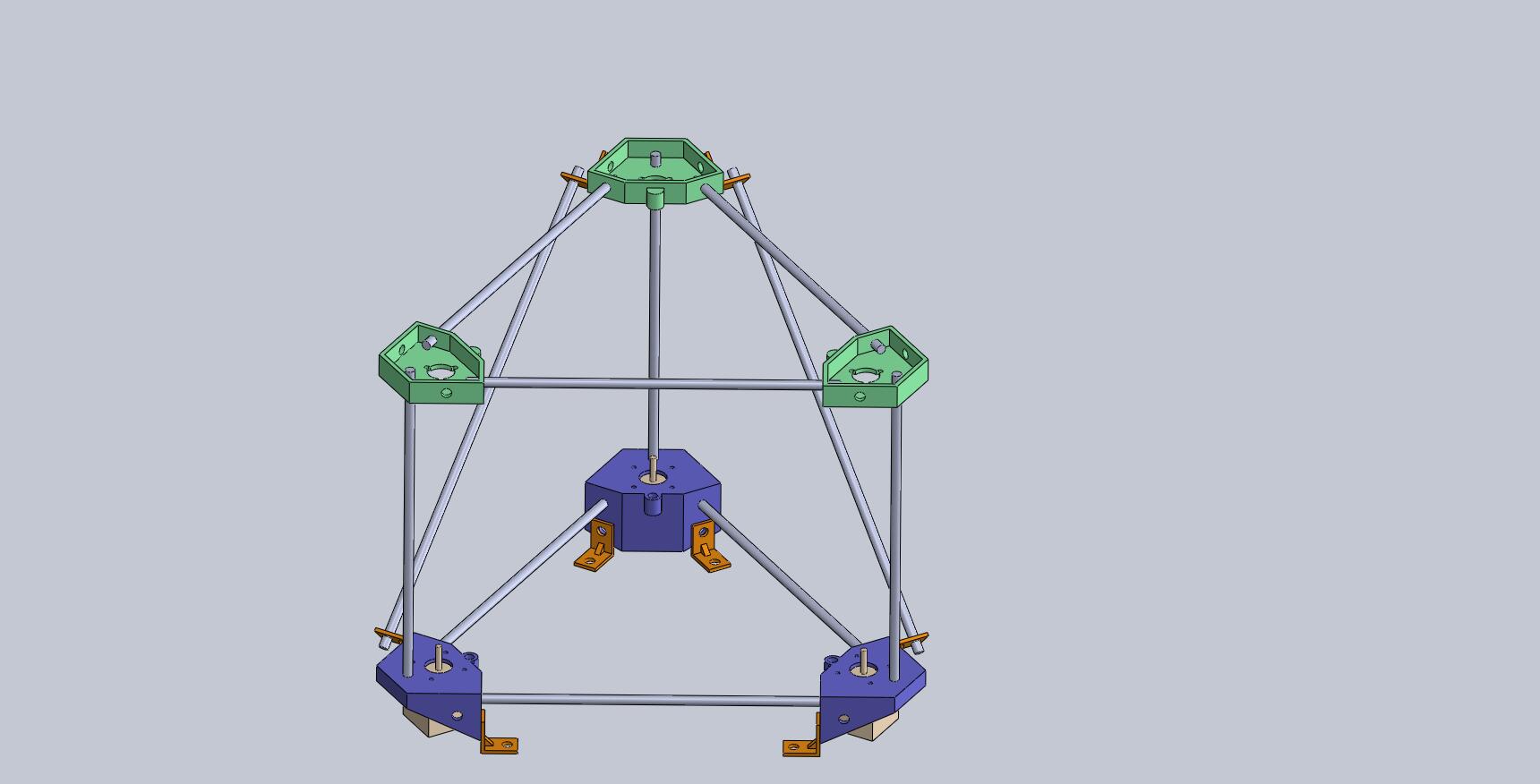
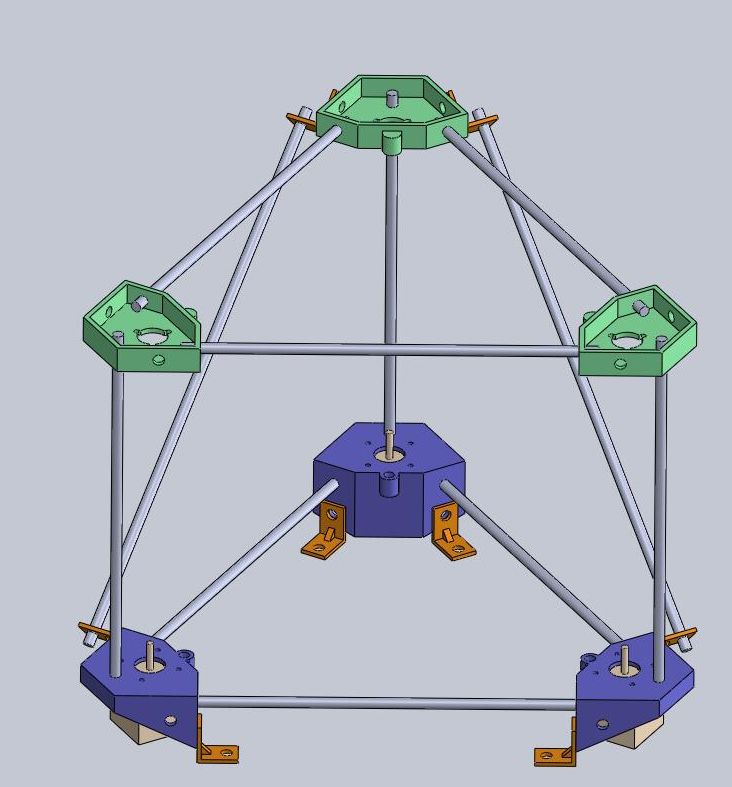
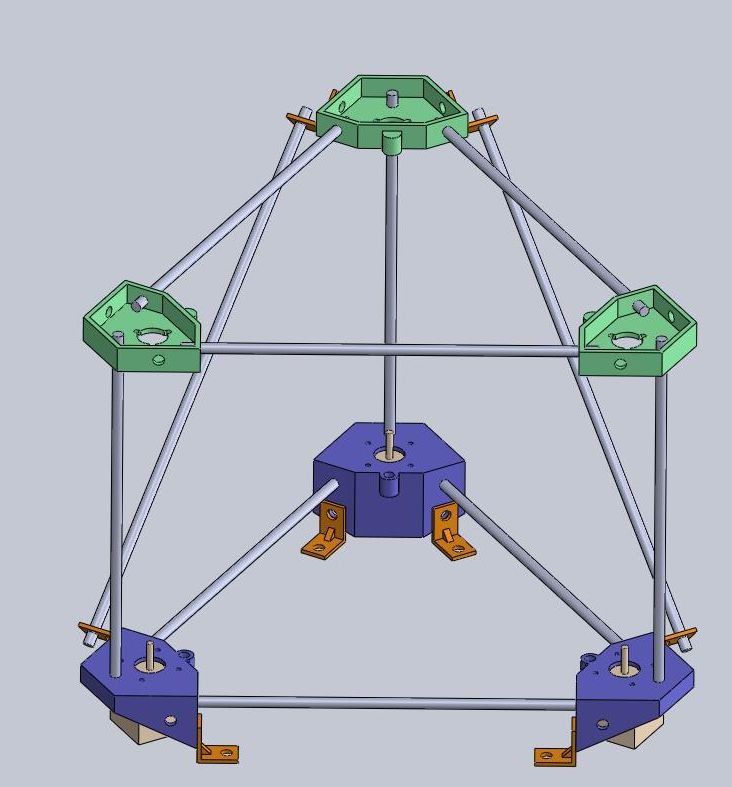
Projekt Bau eines RepRap Delta
Schritt 1: Detlef hat sich mit der Runde hier an den Delta gewagt.
Schritt 2: [www.heliumfrog.net63.net] hier wurde das Thema schon behandelt. Leider kam KEIN Kontakt zustande.
Schritt 3: Orientierend am Frosch Design versucht die deutsche Reprap Community nun ein Exemplar zum laufen zu bekommen. Das wäre die erste gemeinsame Entwicklung im Forum bezogen auf einen Delta.
Schritt 4: Peter (wakeer) + externe Hilfe zeichnet das Frosch Design ab PC nach.
Schritt 5: Wolfgang (Stoffel15) druckt die teile und gibt Schwachstellen an zum sofortigen nachbessern.
Schritt 6: Grundgerüst wird zusammengebaut und anschließend an die Elektroniker weitergereicht.(zerlegt)
Schritt 7: Elektronik incl. Verkabelung wird durchgeführt
Schritt 8: Übergabe an Softwarespezialisten. (Detlef)
Schritt 9: Saubere Doku für alle am besten zweisprachig
Schritt 7-9 sind noch offen wer da mitwirkt. Bitte kurz Antwort. Ich hoffe auf VDX, peer, Detlef, und und und.
Leitfaden:
1. Maße und Konstruktion am Mendel angelegt. (M8 Gewindestangen, Aufnahmen für Schrittmotoren usw.)
2. Einsatz von den gleichen Motoren wie beim Mendel
3. Elektronik Arduino
Edited 2 time(s). Last edit at 10/18/2010 12:36PM by wakeer.
Schritt 1: Detlef hat sich mit der Runde hier an den Delta gewagt.
Schritt 2: [www.heliumfrog.net63.net] hier wurde das Thema schon behandelt. Leider kam KEIN Kontakt zustande.
Schritt 3: Orientierend am Frosch Design versucht die deutsche Reprap Community nun ein Exemplar zum laufen zu bekommen. Das wäre die erste gemeinsame Entwicklung im Forum bezogen auf einen Delta.
Schritt 4: Peter (wakeer) + externe Hilfe zeichnet das Frosch Design ab PC nach.
Schritt 5: Wolfgang (Stoffel15) druckt die teile und gibt Schwachstellen an zum sofortigen nachbessern.
Schritt 6: Grundgerüst wird zusammengebaut und anschließend an die Elektroniker weitergereicht.(zerlegt)
Schritt 7: Elektronik incl. Verkabelung wird durchgeführt
Schritt 8: Übergabe an Softwarespezialisten. (Detlef)
Schritt 9: Saubere Doku für alle am besten zweisprachig
Schritt 7-9 sind noch offen wer da mitwirkt. Bitte kurz Antwort. Ich hoffe auf VDX, peer, Detlef, und und und.
Leitfaden:
1. Maße und Konstruktion am Mendel angelegt. (M8 Gewindestangen, Aufnahmen für Schrittmotoren usw.)
2. Einsatz von den gleichen Motoren wie beim Mendel
3. Elektronik Arduino
Edited 2 time(s). Last edit at 10/18/2010 12:36PM by wakeer.
|
Re: RepRap Delta Übersicht October 17, 2010 01:36PM |
Registered: 14 years ago Posts: 7,505 |

{kind=link}
{kind=link}
{kind=link}
{kind=link}
Edited 1 time(s). Last edit at 10/17/2010 01:36PM by Stoffel15.
Mfg
Wolfgang
| Aller Anfang war schwer - Wolfstrap | Reprap-fab.org |  |
Erfahrungen kann man leider schlecht weiter geben, die muss man selber machen.
{kind=link}
{kind=link}
|
Re: RepRap Delta Übersicht October 18, 2010 06:21AM |
Admin Registered: 16 years ago Posts: 13,884 |
... zur Koordinatentransformations-Berechnung eines Tripods hatte ich hier schonmal was gepostet ...
Mit dem Bild eines reinen XY-Tripods (in der Ebene, entspricht Alex Joni's Toy) ergibt sich die Basisberechnung:
La = SQRT(X^2 + Y^2)
Lb = SQRT((Db-X)^2 + Y^2)
Lc = SQRT((Db/2-X)^2 + (Dc-Y)^2)
Um das in 3D umzurechnen, muß man wissen, daß bei diesem Tripod/Delta-Aufbau für die Z-achse einfach nur alle Motoren synchron verfahren werden.
Mit der Arm-Länge ARM und der Vereinfachung, daß die Größe/Ausdehnung des bewegten Kopfes im Koordinatenraum einfach ignoriert werden kann, da es keinen Unterschied macht, ob die Arme am Rand oder im Zentrum befestigt sind (ich muß nur die Breite/Höhe des Kopfes aus Db,Dc rausrechnen), bekomme ich folgende 3D-Transformation für die Bewegung der jeweiligen Achsen:
A = SQRT(ARM^2 - La^2) + Z
B = SQRT(ARM^2 - Lb^2) + Z
C = SQRT(ARM^2 - Lc^2) + Z
oder
A = SQRT(ARM^2 - X^2 - Y^2) + Z
B = SQRT(ARM^2 - (Db-X)^2 -Y^2) + Z
C = SQRT(ARM^2 - (Db/2-X)^2 - (Dc-Y)^2) + Z
Um damit eine möglichst lineare Bewegung des Kopfes hinzubekommen, muß jede XY(Z)-Bewegung in möglichst kurze (ich schätze mal <1mm) Segmente unterteilt werden und jede Bewegung nach X,Y(,Z) umgerechnet werden in A,B,C ... bei einer reinen Z-Bewegung fahren alle drei Motoren gleichzeitig die Z-Strecke ohne weitere Berechnung.
Falls es jemand nachrechnet und einen Fehler findet, bitte Bescheid sagen ...
Edited 2 time(s). Last edit at 10/18/2010 06:28AM by VDX.
Viktor
--------
Aufruf zum Projekt "Müll-freie Meere" - [reprap.org] -- Deutsche Facebook-Gruppe - [www.facebook.com]
Call for the project "garbage-free seas" - [reprap.org]
Mit dem Bild eines reinen XY-Tripods (in der Ebene, entspricht Alex Joni's Toy) ergibt sich die Basisberechnung:
La = SQRT(X^2 + Y^2)
Lb = SQRT((Db-X)^2 + Y^2)
Lc = SQRT((Db/2-X)^2 + (Dc-Y)^2)
Um das in 3D umzurechnen, muß man wissen, daß bei diesem Tripod/Delta-Aufbau für die Z-achse einfach nur alle Motoren synchron verfahren werden.
Mit der Arm-Länge ARM und der Vereinfachung, daß die Größe/Ausdehnung des bewegten Kopfes im Koordinatenraum einfach ignoriert werden kann, da es keinen Unterschied macht, ob die Arme am Rand oder im Zentrum befestigt sind (ich muß nur die Breite/Höhe des Kopfes aus Db,Dc rausrechnen), bekomme ich folgende 3D-Transformation für die Bewegung der jeweiligen Achsen:
A = SQRT(ARM^2 - La^2) + Z
B = SQRT(ARM^2 - Lb^2) + Z
C = SQRT(ARM^2 - Lc^2) + Z
oder
A = SQRT(ARM^2 - X^2 - Y^2) + Z
B = SQRT(ARM^2 - (Db-X)^2 -Y^2) + Z
C = SQRT(ARM^2 - (Db/2-X)^2 - (Dc-Y)^2) + Z
Um damit eine möglichst lineare Bewegung des Kopfes hinzubekommen, muß jede XY(Z)-Bewegung in möglichst kurze (ich schätze mal <1mm) Segmente unterteilt werden und jede Bewegung nach X,Y(,Z) umgerechnet werden in A,B,C ... bei einer reinen Z-Bewegung fahren alle drei Motoren gleichzeitig die Z-Strecke ohne weitere Berechnung.
Falls es jemand nachrechnet und einen Fehler findet, bitte Bescheid sagen ...
Edited 2 time(s). Last edit at 10/18/2010 06:28AM by VDX.
Viktor
--------
Aufruf zum Projekt "Müll-freie Meere" - [reprap.org] -- Deutsche Facebook-Gruppe - [www.facebook.com]
Call for the project "garbage-free seas" - [reprap.org]
|
Re: RepRap Delta Übersicht October 18, 2010 06:00PM |
Registered: 13 years ago Posts: 1,918 |
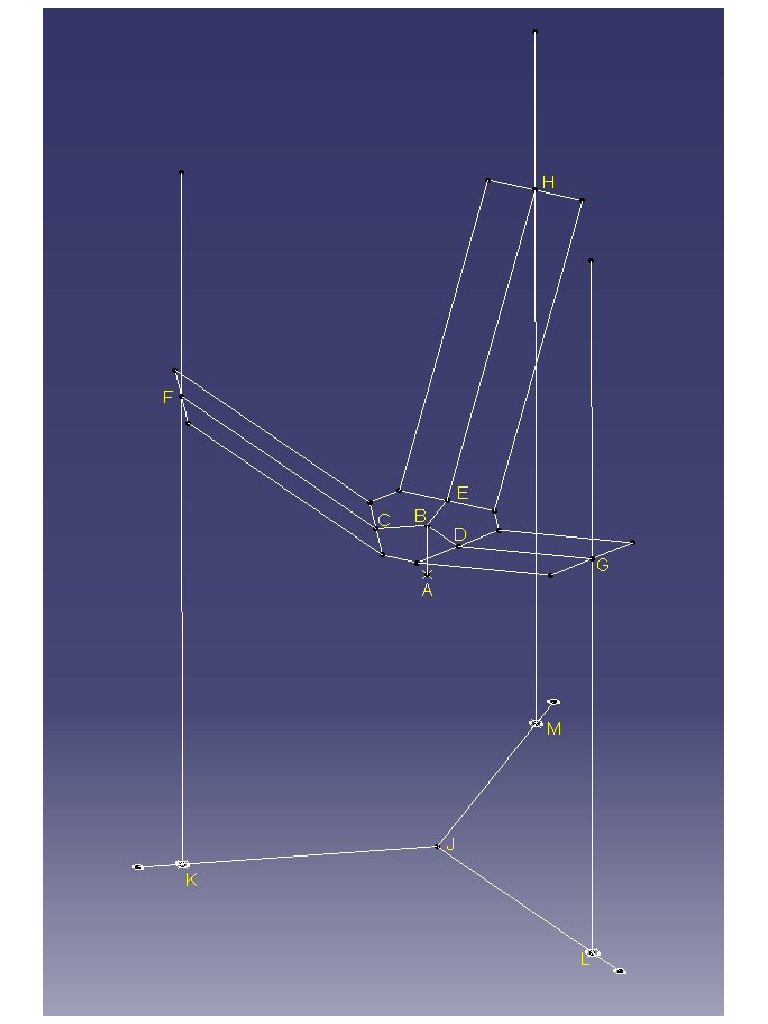
Schau Dir mal diese Skizze von der Froschseite an.
Wenn die "Vereinfachung, daß die Größe/Ausdehnung des bewegten Kopfes im Koordinatenraum einfach ignoriert werden kann", stimmt, müsste doch dist(F,B ) =const sein, oder? Ist es aber nicht. Es gilt nur dist(F,C ) =const und dist(C,B ) =const.
Hast Du das Excel-File von der Seite?
Edited 2 time(s). Last edit at 10/18/2010 06:10PM by theodleif.
Wenn die "Vereinfachung, daß die Größe/Ausdehnung des bewegten Kopfes im Koordinatenraum einfach ignoriert werden kann", stimmt, müsste doch dist(F,B ) =const sein, oder? Ist es aber nicht. Es gilt nur dist(F,C ) =const und dist(C,B ) =const.
Hast Du das Excel-File von der Seite?
Edited 2 time(s). Last edit at 10/18/2010 06:10PM by theodleif.
{kind=link}
{kind=link}
|
Re: RepRap Delta Übersicht October 18, 2010 07:15PM |
Registered: 13 years ago Posts: 7,616 |
Quote
diese Skizze
Sehr gute Idee, mit dem Catia. Da kann man erst mal die Formeln eingeben und gucken ob die auch richtig sind.
| Generation 7 Electronics | Teacup Firmware | RepRap DIY |
|
Re: RepRap Delta Übersicht October 19, 2010 03:15AM |
Admin Registered: 16 years ago Posts: 13,884 |
... du darfst nicht Dist[F,B] betrachten, sondern du mußt die Strecke [F,C] soweit verschieben, daß C=B wird! ... entsprechend wird die Strecke [K,J] um den Betrag von [C,B] kürzer ...
Da der Kopf sich nicht drehen oder kippen kann, darfst du die Mittellinie der Arme geometrisch so verschieben, daß sie genau in der Mitte ansetzen, ohne daß die verbundene Bewegung sich verändert - die meisten entsprechenden Skizzen werden der Mechanik angepaßt, ohne sich allzuviele Gedanken über mögliche Vereinfachungen zu machen ... oder sie werden soweit vereinfacht/abstrahiert, daß man dahinter das eigentliche mechanische System nicht mehr erkennt ...
Ich hatte es mir überlegt, wie ich die Berechnung möglichst simpel aufziehen kann und bin auf diese vereinfachte Darstellung gekommen, mit der sowohl die Betrachtung, als auch die Berechnung der Verkippungen viel leichter ist, als wenn du alle beteiligten Streckensegmente mit einbeziehst.
Bei meinem Tripod mit den Magnetkugelgelenken habe ich durch das Abrollen der Kugeln aufeinander zwischen den Kugelmittelpunkten noch je zwei kleine Winkelstücke, die ich mit einbeziehen muß, mit den Kugelgelenken oder einem kardanischen Gelenk hast du nur noch die Gelenk-Mittelpunkte, die Armlänge und den Abstand der Linearachsen, was in die Rechnung einfließt ...
Edited 2 time(s). Last edit at 10/19/2010 03:20AM by VDX.
Viktor
--------
Aufruf zum Projekt "Müll-freie Meere" - [reprap.org] -- Deutsche Facebook-Gruppe - [www.facebook.com]
Call for the project "garbage-free seas" - [reprap.org]
Da der Kopf sich nicht drehen oder kippen kann, darfst du die Mittellinie der Arme geometrisch so verschieben, daß sie genau in der Mitte ansetzen, ohne daß die verbundene Bewegung sich verändert - die meisten entsprechenden Skizzen werden der Mechanik angepaßt, ohne sich allzuviele Gedanken über mögliche Vereinfachungen zu machen ... oder sie werden soweit vereinfacht/abstrahiert, daß man dahinter das eigentliche mechanische System nicht mehr erkennt ...
Ich hatte es mir überlegt, wie ich die Berechnung möglichst simpel aufziehen kann und bin auf diese vereinfachte Darstellung gekommen, mit der sowohl die Betrachtung, als auch die Berechnung der Verkippungen viel leichter ist, als wenn du alle beteiligten Streckensegmente mit einbeziehst.
Bei meinem Tripod mit den Magnetkugelgelenken habe ich durch das Abrollen der Kugeln aufeinander zwischen den Kugelmittelpunkten noch je zwei kleine Winkelstücke, die ich mit einbeziehen muß, mit den Kugelgelenken oder einem kardanischen Gelenk hast du nur noch die Gelenk-Mittelpunkte, die Armlänge und den Abstand der Linearachsen, was in die Rechnung einfließt ...
Edited 2 time(s). Last edit at 10/19/2010 03:20AM by VDX.
Viktor
--------
Aufruf zum Projekt "Müll-freie Meere" - [reprap.org] -- Deutsche Facebook-Gruppe - [www.facebook.com]
Call for the project "garbage-free seas" - [reprap.org]
|
Re: RepRap Delta Übersicht October 20, 2010 10:22AM |
Admin Registered: 16 years ago Posts: 13,884 |
... wir sollten auch diesen Thread nicht vergessen, da hier auch noch über den Delta diskutiert wird ...
Viktor
--------
Aufruf zum Projekt "Müll-freie Meere" - [reprap.org] -- Deutsche Facebook-Gruppe - [www.facebook.com]
Call for the project "garbage-free seas" - [reprap.org]
Viktor
--------
Aufruf zum Projekt "Müll-freie Meere" - [reprap.org] -- Deutsche Facebook-Gruppe - [www.facebook.com]
Call for the project "garbage-free seas" - [reprap.org]
|
Re: RepRap Delta Übersicht October 20, 2010 10:33AM |
Registered: 13 years ago Posts: 1,918 |
|
Re: RepRap Delta Übersicht October 20, 2010 10:49AM |
Registered: 13 years ago Posts: 1,918 |
|
Re: RepRap Delta Übersicht October 27, 2010 04:01PM |
Registered: 15 years ago Posts: 376 |
Sorry, you do not have permission to post/reply in this forum.