Stromversorgung Mainboard?
Posted by goaran
|
Stromversorgung Mainboard? December 31, 2010 12:18PM |
Registered: 14 years ago Posts: 176 |
Hallo,
habe mal eine frage zu dem reprap mainboard. Das bekommt seinen Strom von den Steppern oder wie ist das gedacht?
Problem ist, dass ich andere Schrittmotortreiber habe, die nur ein dir/step Signal als Eingang haben.
Wenn ich das board an usb/ttl anschliesse leuchtet es grün und blinkt rot, aber ich kann mich nicht mit dem Board connecten (in ReplicatorG) oder liegt das an etwas anderem?
my projects: [www.robotik.dyyyh.de] ...
habe mal eine frage zu dem reprap mainboard. Das bekommt seinen Strom von den Steppern oder wie ist das gedacht?
Problem ist, dass ich andere Schrittmotortreiber habe, die nur ein dir/step Signal als Eingang haben.
Wenn ich das board an usb/ttl anschliesse leuchtet es grün und blinkt rot, aber ich kann mich nicht mit dem Board connecten (in ReplicatorG) oder liegt das an etwas anderem?
my projects: [www.robotik.dyyyh.de] ...
|
Re: Stromversorgung Mainboard? December 31, 2010 12:23PM |
Registered: 14 years ago Posts: 3,742 |
Welche firmware hast du geladen im mainboard?
Bob Morrison
Wörth am Rhein, Germany
"Luke, use the source!"
BLOG - PHOTOS - Thingiverse
Bob Morrison
Wörth am Rhein, Germany
"Luke, use the source!"
BLOG - PHOTOS - Thingiverse
|
Re: Stromversorgung Mainboard? December 31, 2010 12:42PM |
Registered: 14 years ago Posts: 7,505 |
Das Motherboard Gen3, wird an ein PC-Netzteil angeschlossen, das dann auch die Motoren mit Strom versorgt. Du solltest dem Motherboard die Spannungsversorgung geben, da dadurch auch die Extruderkarte und die Heizung mit Strom versorgt werden. Wie du deinen Motoren den nötigen Saft gibst ist dabei egal.
Mfg
Wolfgang
Erfahrungen kann man leider schlecht weiter geben, die muss man selber machen.
Mfg
Wolfgang
| Aller Anfang war schwer - Wolfstrap | Reprap-fab.org |  |
Erfahrungen kann man leider schlecht weiter geben, die muss man selber machen.
|
Re: Stromversorgung Mainboard? December 31, 2010 12:47PM |
Registered: 14 years ago Posts: 176 |
also das Board ist ein V1.2 (TechzoneRemix) das bekommt seinen Strom wohl auch über USB..
Firmware habe ich die aktuelle Version drauf. Ich werd mir mal die Schaltpläne anschauen glaub, dass ist am einfachsten.
my projects: [www.robotik.dyyyh.de] ...
Firmware habe ich die aktuelle Version drauf. Ich werd mir mal die Schaltpläne anschauen glaub, dass ist am einfachsten.
my projects: [www.robotik.dyyyh.de] ...
|
Re: Stromversorgung Mainboard? December 31, 2010 01:15PM |
Registered: 14 years ago Posts: 7,505 |
Soweit ich mich erinnere ist die Techtronix eigentlich ein Nachbau der Gen3. Müßte also grundsätzlich genauso funktionieren.
Mfg
Wolfgang
Erfahrungen kann man leider schlecht weiter geben, die muss man selber machen.
Mfg
Wolfgang
| Aller Anfang war schwer - Wolfstrap | Reprap-fab.org | |
Erfahrungen kann man leider schlecht weiter geben, die muss man selber machen.
|
Re: Stromversorgung Mainboard? December 31, 2010 01:22PM |
Registered: 13 years ago Posts: 7,616 |
Quote
also das Board ist ein V1.2 (TechzoneRemix) das bekommt seinen Strom wohl auch über USB.
USB liefert max. 0,5 A und nur 5 Volt. Das reicht gerade mal für die Prozessoren; für Schrittmotoren und Heizung ist das deutlich zu wenig.
Oh, und es gibt sicherlich fünf bis zehn Versionen der Firmware, die man als "aktuell" bezeichnen kann. Wenn die serielle Verbindung nicht klappt, erst mal mit GtkTerm, HyperTerminal oder einem anderen Terminal Emulator "von Hand" testen, was da auf der Leitung passiert.
| Generation 7 Electronics | Teacup Firmware | RepRap DIY |
|
Re: Stromversorgung Mainboard? December 31, 2010 01:57PM |
Registered: 14 years ago Posts: 176 |
das der Strom nicht für die Stepper reicht ist mir klar und für die Heizung sowieso nicht, aber für den atmega sollte es ja reichen.
Werde da wohl etwas rumbauen müssen, denn die Masseverbindung läuft nur über die Stepper-Treiber, das muss noch zusammen wenn ich die weglasse.
Firmware hatte ich vor 2 Tage von sourceforge gezogen, das meinte ich mit aktuell
in gtkterm sieht eigentlich alles gut aus, und mit der repraphostsoftware funktioniert es wohl besser, werde es jetzt erstmal damit machen.
falls es jemanden interessiert, so sieht die kleine aus :
[robotik.dyyyh.de]
[robotik.dyyyh.de]
[robotik.dyyyh.de]
gibt es eigentlich irgendeine liste was die blinkcodes auf den boards bedueten?
my projects: [www.robotik.dyyyh.de] ...
Werde da wohl etwas rumbauen müssen, denn die Masseverbindung läuft nur über die Stepper-Treiber, das muss noch zusammen wenn ich die weglasse.
Firmware hatte ich vor 2 Tage von sourceforge gezogen, das meinte ich mit aktuell
in gtkterm sieht eigentlich alles gut aus, und mit der repraphostsoftware funktioniert es wohl besser, werde es jetzt erstmal damit machen.
falls es jemanden interessiert, so sieht die kleine aus :
[robotik.dyyyh.de]
[robotik.dyyyh.de]
[robotik.dyyyh.de]
gibt es eigentlich irgendeine liste was die blinkcodes auf den boards bedueten?
my projects: [www.robotik.dyyyh.de] ...
|
Re: Stromversorgung Mainboard? December 31, 2010 02:03PM |
Registered: 14 years ago Posts: 7,505 |
Hey, pass auf, ReplikatoG läuft mit einer anderen Firmware als der Reprap-Host. Schmeiß die nicht durcheinander.
Das was du warscheinlich von sourceforge gezogen hast, ist die Firmware für den Host.
Mfg
Wolfgang
Erfahrungen kann man leider schlecht weiter geben, die muss man selber machen.
Das was du warscheinlich von sourceforge gezogen hast, ist die Firmware für den Host.
Mfg
Wolfgang
| Aller Anfang war schwer - Wolfstrap | Reprap-fab.org | |
Erfahrungen kann man leider schlecht weiter geben, die muss man selber machen.
|
Re: Stromversorgung Mainboard? December 31, 2010 03:01PM |
Registered: 14 years ago Posts: 176 |
Jipp das mit der firmware weis ich, die replicatorg firmware liess sich auch flashen das hat funktioniert, aber die kommunikation ging dann nicht..
my projects: [www.robotik.dyyyh.de] ...
my projects: [www.robotik.dyyyh.de] ...
|
Re: Stromversorgung Mainboard? December 31, 2010 03:24PM |
Registered: 14 years ago Posts: 7,505 |
Nur mit Strom vom USB-Port geht das auch nicht. Da mußt du schon das Netzteil dran hängen. Der blinkt dann zwar, aber sonst nix.
Mfg
Wolfgang
Erfahrungen kann man leider schlecht weiter geben, die muss man selber machen.
Mfg
Wolfgang
| Aller Anfang war schwer - Wolfstrap | Reprap-fab.org | |
Erfahrungen kann man leider schlecht weiter geben, die muss man selber machen.
|
Re: Stromversorgung Mainboard? December 31, 2010 03:37PM |
Registered: 14 years ago Posts: 7,505 |
Das Vorschubsystem von deinem Extruder finde ich ja garnicht schlecht. Mit dem Doppelten Vortrieb. Aber die Düse halte ich für etwas "Überdimensioniert".
Selber gebaut ?
Mfg
Wolfgang
Erfahrungen kann man leider schlecht weiter geben, die muss man selber machen.
Selber gebaut ?
Mfg
Wolfgang
| Aller Anfang war schwer - Wolfstrap | Reprap-fab.org | |
Erfahrungen kann man leider schlecht weiter geben, die muss man selber machen.
|
Re: Stromversorgung Mainboard? December 31, 2010 08:41PM |
Registered: 14 years ago Posts: 176 |
der extruder ist eigenbau siehe: [www.thingiverse.com]
die düse ist eine standard m6 hutmutter mit 0.3mm Bohrung
my projects: [www.robotik.dyyyh.de] ...
die düse ist eine standard m6 hutmutter mit 0.3mm Bohrung
my projects: [www.robotik.dyyyh.de] ...
|
Re: Stromversorgung Mainboard? January 01, 2011 03:24PM |
Registered: 14 years ago Posts: 176 |
Ok, habe jetzt mal alles zum laufen gebracht, alleridngs tut es nicht so wie es soll.
Wenn ich im xyz Tab in der ReprapHostSoftware die Schrittweite auf 10mm stelle und nach rechts fahre geht das, nach links jedoch nicht, bei der Z achse geht es gar nicht.
Ausserdem friert die Software desöfteren ein wenn man einen Button drückt.
System ist Ubuntu , Java ist Open JDK 6
Was auch seltsam ist, die LED am FET für den Heater leuchtet immer schwach, auch wenn er aus ist, oder wird der auch bei ausgeschaltetem heater leicht geheizt über PWM oder so?
jemand eine Idee?
my projects: [www.robotik.dyyyh.de] ...
Wenn ich im xyz Tab in der ReprapHostSoftware die Schrittweite auf 10mm stelle und nach rechts fahre geht das, nach links jedoch nicht, bei der Z achse geht es gar nicht.
Ausserdem friert die Software desöfteren ein wenn man einen Button drückt.
System ist Ubuntu , Java ist Open JDK 6
Was auch seltsam ist, die LED am FET für den Heater leuchtet immer schwach, auch wenn er aus ist, oder wird der auch bei ausgeschaltetem heater leicht geheizt über PWM oder so?
jemand eine Idee?
my projects: [www.robotik.dyyyh.de] ...
|
Re: Stromversorgung Mainboard? January 01, 2011 03:53PM |
Registered: 14 years ago Posts: 7,505 |
Die Ache braucht den Endschalter. dann geht die auch in die andere Richtung.
Bei dem Heater kann es sein, das man was in der Firmware umstellen muß.... so was hatte ich bei der Firmware von der Ramps auch.
Hab ich hier irgendwo aber mal beschrieben...
[forums.reprap.org]
Edited 1 time(s). Last edit at 01/01/2011 03:56PM by Stoffel15.
Mfg
Wolfgang
Erfahrungen kann man leider schlecht weiter geben, die muss man selber machen.
Bei dem Heater kann es sein, das man was in der Firmware umstellen muß.... so was hatte ich bei der Firmware von der Ramps auch.
Hab ich hier irgendwo aber mal beschrieben...
[forums.reprap.org]
Edited 1 time(s). Last edit at 01/01/2011 03:56PM by Stoffel15.
Mfg
Wolfgang
| Aller Anfang war schwer - Wolfstrap | Reprap-fab.org | |
Erfahrungen kann man leider schlecht weiter geben, die muss man selber machen.
|
Re: Stromversorgung Mainboard? January 01, 2011 07:00PM |
Registered: 14 years ago Posts: 176 |
Danke für den Link, das werde ich mir mal anschauen,
die Endschalter habe ich dran, bzw nicht die opto, sondern Taster, habe auch versucht mit invertiertem Signal in der config, das geht dann aber trotzdem nicht.
my projects: [www.robotik.dyyyh.de] ...
die Endschalter habe ich dran, bzw nicht die opto, sondern Taster, habe auch versucht mit invertiertem Signal in der config, das geht dann aber trotzdem nicht.
my projects: [www.robotik.dyyyh.de] ...
|
Re: Stromversorgung Mainboard? January 02, 2011 07:58AM |
Registered: 14 years ago Posts: 7,505 |
Also normalerweise laufen die Motoren in eine Richtung bis sie den Endschalter auslösen und laufen dann erst in die andere Richtung.
Es gibt aber auch irgendwo in der Wiki eine Firmware, mit der man die Motoren testen kann.
Da war mir der falsche Link rein geraten..sorry
[www.reprap.org]
Edited 2 time(s). Last edit at 01/03/2011 07:49AM by Stoffel15.
Mfg
Wolfgang
Erfahrungen kann man leider schlecht weiter geben, die muss man selber machen.
Es gibt aber auch irgendwo in der Wiki eine Firmware, mit der man die Motoren testen kann.
Da war mir der falsche Link rein geraten..sorry
[www.reprap.org]
Edited 2 time(s). Last edit at 01/03/2011 07:49AM by Stoffel15.
Mfg
Wolfgang
| Aller Anfang war schwer - Wolfstrap | Reprap-fab.org | |
Erfahrungen kann man leider schlecht weiter geben, die muss man selber machen.
|
Re: Stromversorgung Mainboard? January 03, 2011 05:47AM |
Registered: 13 years ago Posts: 7,616 |
... es sei denn, den Motorentreibern fehlt das DIR-Signal. Wenn nur das STEP-Signal durch kommt, laufen die Motoren auch immer in die gleiche Richtung.
| Generation 7 Electronics | Teacup Firmware | RepRap DIY |
|
Re: Stromversorgung Mainboard? January 03, 2011 07:49AM |
Registered: 14 years ago Posts: 7,505 |
Hab den link berichtigt... sorry
[www.reprap.org]
Mfg
Wolfgang
Erfahrungen kann man leider schlecht weiter geben, die muss man selber machen.
[www.reprap.org]
Mfg
Wolfgang
| Aller Anfang war schwer - Wolfstrap | Reprap-fab.org | |
Erfahrungen kann man leider schlecht weiter geben, die muss man selber machen.
|
Re: Stromversorgung Mainboard? January 03, 2011 12:59PM |
Registered: 14 years ago Posts: 176 |
Erst mal danke für die Hilfe bis jetzt, bin nun schon mal weiter.
Motoren laufen in alle Richtungen, der endschalter war defekt
XY Richtung funktionieren jetzt perfekt, bei der Z-Achse habe ich aber ein Problem, und zwar ist die extrem langsam (desswegen dachte ich erst sie geht nicht) Sie macht nur alle paar sekunden einen Schritt. In der firmware habe ich aber eigtnlich alles so eingestellt wie bei X und Y
benutze gerade repsnapper, die repraphost software tut bei mir nicht richtig, dort ist es aber genauso..
Und dann hätte ich noch eine Frage zu dem Extruder-Stepper, der ist extrem schwach, ist das normal oder kann man das umstellen? Ansosnten würde ich halt einen Steppertreiber dafür verwenden statt dem extruder-board, das sollte ja ohne Probleme gehen..
my projects: [www.robotik.dyyyh.de] ...
Motoren laufen in alle Richtungen, der endschalter war defekt
XY Richtung funktionieren jetzt perfekt, bei der Z-Achse habe ich aber ein Problem, und zwar ist die extrem langsam (desswegen dachte ich erst sie geht nicht) Sie macht nur alle paar sekunden einen Schritt. In der firmware habe ich aber eigtnlich alles so eingestellt wie bei X und Y
#define Z_STEPS_PER_MM 80 #define Z_STEPS_PER_INCH (Z_STEPS_PER_MM*INCHES_TO_MM) // *RO #define INVERT_Z_DIR 0 ... //our maximum feedrates in mm/minute #define FAST_XY_FEEDRATE 1500.0 #define FAST_Z_FEEDRATE 1500.0 // Data for acceleration calculations // Comment out the next line to turn accelerations off #define ACCELERATION_ON #define SLOW_XY_FEEDRATE 30.0 // Speed from which to start accelerating #define SLOW_Z_FEEDRATE 30.0
benutze gerade repsnapper, die repraphost software tut bei mir nicht richtig, dort ist es aber genauso..
Und dann hätte ich noch eine Frage zu dem Extruder-Stepper, der ist extrem schwach, ist das normal oder kann man das umstellen? Ansosnten würde ich halt einen Steppertreiber dafür verwenden statt dem extruder-board, das sollte ja ohne Probleme gehen..
my projects: [www.robotik.dyyyh.de] ...
|
Re: Stromversorgung Mainboard? January 03, 2011 01:10PM |
Registered: 14 years ago Posts: 7,505 |
kann es sein das du zu wenig steps per mm für die Z-achse angegeben hast ? ich hab vergessen was du für ein Gerät hast ? Mendel ?
Auf der Extruderkarte ist ein Poti, damit lässt sich die Kraft des Extruders einstellen (eigentlich der Strom zum Motor). Beim Host gibt es einen Parameter dafür, in Skeinforge ebenfalls. Beim ReplikatorG weis ich es jetzt nicht so genau, soweit ich mich erinnere aber auch.
Mfg
Wolfgang
Erfahrungen kann man leider schlecht weiter geben, die muss man selber machen.
Auf der Extruderkarte ist ein Poti, damit lässt sich die Kraft des Extruders einstellen (eigentlich der Strom zum Motor). Beim Host gibt es einen Parameter dafür, in Skeinforge ebenfalls. Beim ReplikatorG weis ich es jetzt nicht so genau, soweit ich mich erinnere aber auch.
Mfg
Wolfgang
| Aller Anfang war schwer - Wolfstrap | Reprap-fab.org | |
Erfahrungen kann man leider schlecht weiter geben, die muss man selber machen.
|
Re: Stromversorgung Mainboard? January 03, 2011 01:31PM |
Registered: 14 years ago Posts: 176 |
Ok, das mit dem Extruder bekomme ich hin,
das mit den Steps verwirrt mich aber.
Ich habe alle 3 Achsen gleich (sind auch Baugleich, ist eine CNC eigentlich)
hier mal meine config
das mit den Steps verwirrt mich aber.
Ich habe alle 3 Achsen gleich (sind auch Baugleich, ist eine CNC eigentlich)
hier mal meine config
#ifndef CONFIGURATION_H #define CONFIGURATION_H /* * This is the configuration file for the RepRap Motherboard microcontroller. * Set values in it to match your RepRap machine. * * Lines in here with a * * // *RO * * Comment at the end (read-only) should probably only be changed if you really * know what you are doing... */ // Here are the Motherboard codes; set MOTHERBOARD to the right one // A standard Mendel is MOTHERBOARD 2 // (Arduino: 0 - no longer in use) // Sanguino or RepRap Motherboard with direct drive extruders: 1 // RepRap Motherboard with RS485 extruders: 2 // Arduino Mega: 3 #define MOTHERBOARD 2 // The width of Henry VIII's thumb (or something). #define INCHES_TO_MM 25.4 // *RO // The number of real extruders in this machine #define EXTRUDER_COUNT 1 //********************************************************************************************** // These settings are mainly for a standard Mendel //********************************************************************************************* #if MOTHERBOARD == 2 // Comment out the next line if you are running a Darwin with a MOTHERBOARD > 1 #define MENDEL 1 // Set to 1 if enable pins are inverting // For RepRap stepper boards version 1.x the enable pins are *not* inverting. // For RepRap stepper boards version 2.x and above the enable pins are inverting. #define INVERT_ENABLE_PINS 1 // Set to one if the axis opto-sensor outputs inverting (ie: 1 means open, 0 means closed) // RepRap opto endstops with H21LOI sensors are not inverting; ones with H21LOB // are inverting. #define X_ENDSTOP_INVERTING false #define Y_ENDSTOP_INVERTING false #define Z_ENDSTOP_INVERTING false #define MY_NAME 'H' // Byte representing the name of this device #define E0_NAME '0' // Byte representing the name of extruder 0 #define E1_NAME '1' // Byte representing the name of extruder 1 #define RS485_MASTER 1 // *RO // Axis scaling in stepper-motor steps per mm of movement #define X_STEPS_PER_MM 80 #define X_STEPS_PER_INCH (X_STEPS_PER_MM*INCHES_TO_MM) // *RO #define INVERT_X_DIR 0 #define Y_STEPS_PER_MM 80 #define Y_STEPS_PER_INCH (Y_STEPS_PER_MM*INCHES_TO_MM) // *RO #define INVERT_Y_DIR 0 #define Z_STEPS_PER_MM 80 #define Z_STEPS_PER_INCH (Z_STEPS_PER_MM*INCHES_TO_MM) // *RO #define INVERT_Z_DIR 0 // Stepper-driven extruder // E_STEPS_PER_MM is the number of steps needed to // extrude 1mm out of the nozzle. E0 for extruder 0; // E1 for extruder 1, and so on. //#define E_STEPS_PER_MM 0.9 // NEMA 17 extruder 5mm diameter drive - empirically adjusted //#define E0_STEPS_PER_MM 2 // NEMA 17 59/11 geared extruder 8mm diameter drive //#define E1_STEPS_PER_MM 2.2 // NEMA 17 59/11 geared extruder 8mm diameter drive #define E0_STEPS_PER_MM 5 // Gefräster Extruder #endif //********************************************************************************************** // These settings are mainly for a Mendel with an Arduino Mega controller and Pololu stepper drivers // See [reprap.org] //********************************************************************************************* //********************************************************************************************** // All other Settings not specific to the motherboard type: //********************************************************************************************* // The speed at which to talk with the host computer; default is 19200 #define HOST_BAUD 19200 // *RO // Set 1s where you have endstops; 0s where you don't // Both Darwin and Mendel have MIN endstops, but not MAX ones. #define ENDSTOPS_MIN_ENABLED 1 #define ENDSTOPS_MAX_ENABLED 0 // The number of mm below which distances are insignificant (one tenth the // resolution of the machine is the default value). #define SMALL_DISTANCE 0.01 // *RO // Useful to have its square #define SMALL_DISTANCE2 (SMALL_DISTANCE*SMALL_DISTANCE) // *RO //our maximum feedrates in mm/minute #define FAST_XY_FEEDRATE 3000.0 #define FAST_Z_FEEDRATE 3000.0 // Data for acceleration calculations // Comment out the next line to turn accelerations off #define ACCELERATION_ON #define SLOW_XY_FEEDRATE 1000.0 // Speed from which to start accelerating #define SLOW_Z_FEEDRATE 1000.0 #if INVERT_ENABLE_PINS == 1 // *RO #define ENABLE_ON LOW // *RO #else // *RO #define ENABLE_ON HIGH // *RO #endif // *RO // Set these to 1 to disable an axis when it's not being used, // and for the extruder. Usually only Z is disabled when not in // use. You will probably find that disabling the others (i.e. // powering down the steppers that drive them) when the ends of // movements are reached causes poor-quality builds. (Inertia // causes overshoot if the motors are not left powered up.) #define DISABLE_X 0 #define DISABLE_Y 0 #define DISABLE_Z 0 #define DISABLE_E 0 // The number of 5-second intervals to wait at the target temperature for things to stabilise. // Too short, and the extruder will jam as only part of it will be hot enough. // Too long and the melt will extend too far up the insulating tube. // Default value: 10 #define WAIT_AT_TEMPERATURE 10 // PID gains. These are about right for a brass extruder about 8 mm // in diameter and 30 mm long heated by a 6 ohm coil with a 12v supply. #define TEMP_PID_PGAIN 2 #define TEMP_PID_IGAIN 0.07 #define TEMP_PID_DGAIN 1 //our command string length #define COMMAND_SIZE 128 // *RO // Our response string length #define RESPONSE_SIZE 256 // *RO // The size of the movement buffer #define BUFFER_SIZE 4 // *RO // Number of microseconds between timer interrupts when no movement // is happening #define DEFAULT_TICK (long)1000 // *RO // What delay() value to use when waiting for things to free up in milliseconds #define WAITING_DELAY 1 // *RO //****************************************************************************** // You probably only want to edit things below this line if you really really // know what you are doing... void delayMicrosecondsInterruptible(unsigned int us); // Inline interrupt control functions inline void enableTimerInterrupt() { TIMSK1 |= (1<Edited 1 time(s). Last edit at 01/03/2011 01:56PM by goaran.
my projects: [www.robotik.dyyyh.de] ...
|
Re: Stromversorgung Mainboard? January 03, 2011 02:42PM |
Registered: 14 years ago Posts: 7,505 |
Welche Firmware ist das ? Eine Trunk oder die letzte Offizielle ?
testeshalber würde ich den mal aus Machen, kannst du immer noch einschalten wenn du ihn laufen hast.
#define ACCELERATION_ON
Bei dir haben alle 3 Achsen die selbe Übersetzung ?
In der Firmware sehe ich auf Anhieb erst mal nix auffälliges. Was ist mit dem Replikator ? Maschines .xml was hast du da für die Achsen angeben ?
Der hat ja eh seine Eigene Firmware.
Mfg
Wolfgang
Erfahrungen kann man leider schlecht weiter geben, die muss man selber machen.
testeshalber würde ich den mal aus Machen, kannst du immer noch einschalten wenn du ihn laufen hast.
#define ACCELERATION_ON
Bei dir haben alle 3 Achsen die selbe Übersetzung ?
In der Firmware sehe ich auf Anhieb erst mal nix auffälliges. Was ist mit dem Replikator ? Maschines .xml was hast du da für die Achsen angeben ?
Der hat ja eh seine Eigene Firmware.
Mfg
Wolfgang
| Aller Anfang war schwer - Wolfstrap | Reprap-fab.org | |
Erfahrungen kann man leider schlecht weiter geben, die muss man selber machen.
|
Re: Stromversorgung Mainboard? January 03, 2011 03:05PM |
Registered: 14 years ago Posts: 176 |
firmware habe ich folgende: reprap-mendel-20100806.zip von hier: [sourceforge.net]
meine Achsen sind 3 Kugelumlaufspindeln mit 5mm steigung jeweis einem 200Schritte/Umdrehung Stepper mit halbschritt -> 80Steps/mm
Acceleration habe ich schon ausgeschaltet, weil er irgendwie nur beschleunigt aber dann nicht abbremst, das bringt ja nichts, da fehlt irgendwie die Rampe bei negativer Beschleunigung kann das sein?
was ich noch gefunden habe ist in der process_g_code.c folgendes:
alleridngs weis ich auch nicht was das tut,
EDIT:
habe mal testweise in der Pins.h die X und Z vertauscht, was nicht geht ist immer noch Z also liegt der fehler nicht an der Hardware...
Edited 1 time(s). Last edit at 01/03/2011 03:21PM by goaran.
my projects: [www.robotik.dyyyh.de] ...
meine Achsen sind 3 Kugelumlaufspindeln mit 5mm steigung jeweis einem 200Schritte/Umdrehung Stepper mit halbschritt -> 80Steps/mm
Acceleration habe ich schon ausgeschaltet, weil er irgendwie nur beschleunigt aber dann nicht abbremst, das bringt ja nichts, da fehlt irgendwie die Rampe bei negativer Beschleunigung kann das sein?
was ich noch gefunden habe ist in der process_g_code.c folgendes:
void zero) { where_i_am.f = SLOW_XY_FEEDRATE; specialMove
alleridngs weis ich auch nicht was das tut,
EDIT:
habe mal testweise in der Pins.h die X und Z vertauscht, was nicht geht ist immer noch Z also liegt der fehler nicht an der Hardware...
Edited 1 time(s). Last edit at 01/03/2011 03:21PM by goaran.
my projects: [www.robotik.dyyyh.de] ...
|
Re: Stromversorgung Mainboard? January 03, 2011 03:26PM |
Registered: 14 years ago Posts: 7,505 |
Du hast eben gesagt du benutzt ReplicatorG. Der hat eine eigene Firmware.
Da werden die Achsen in der machines.xml eingestellt.
Mfg
Wolfgang
Erfahrungen kann man leider schlecht weiter geben, die muss man selber machen.
Da werden die Achsen in der machines.xml eingestellt.
-- different pulleys on X and Y axii -- axis id="x" length="100" maxfeedrate="5000" scale="11.767463" axis id="y" length="100" maxfeedrate="5000" scale="11.767463" axis id="z" length="100" maxfeedrate="150" scale="320"
Mfg
Wolfgang
| Aller Anfang war schwer - Wolfstrap | Reprap-fab.org | |
Erfahrungen kann man leider schlecht weiter geben, die muss man selber machen.
|
Re: Stromversorgung Mainboard? January 03, 2011 03:38PM |
Registered: 14 years ago Posts: 176 |
nee den replicator habe ich nicht zum laufen gebracht und die ReprapHostsoftware hängt bei mir immer, desswegen habe ich gerade repsnapper.... Ist aber prinzipiell erst mal egal, weil wenn ich einfahc nur g-codes sende ist das ja software-unabhängig.
my projects: [www.robotik.dyyyh.de] ...
my projects: [www.robotik.dyyyh.de] ...
|
Re: Stromversorgung Mainboard? January 03, 2011 03:44PM |
Registered: 14 years ago Posts: 7,505 |
ja, den Host muß man etwas mit Vorsicht genießen... der ist nicht sehr stabil.
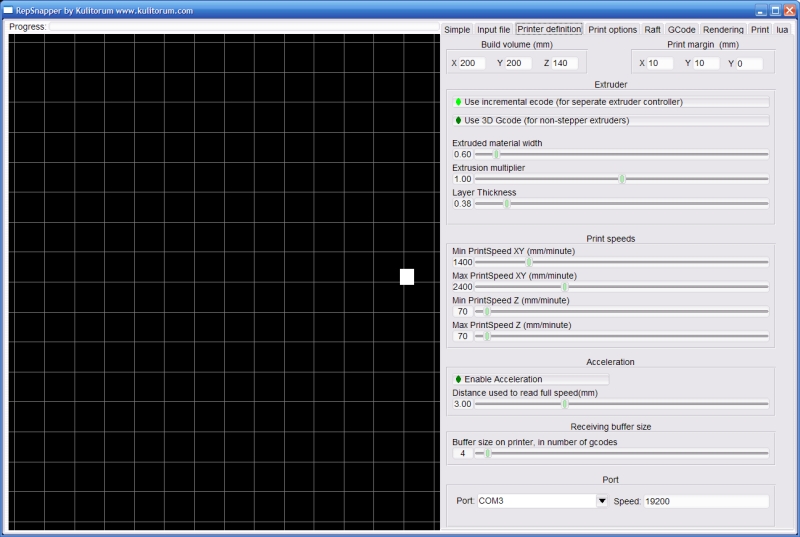
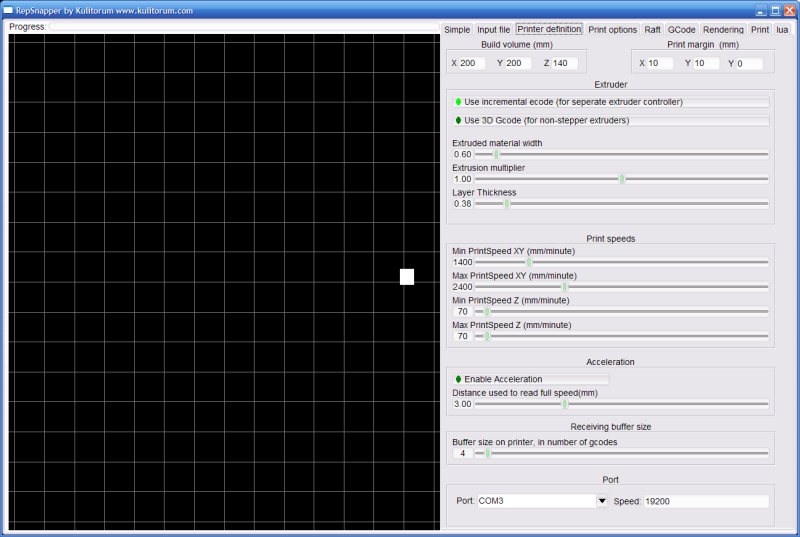
Hatte der Snapper nicht auch so eine Stelle wo dem die Achsen definiert wurden... ? Ich hab den leider nur ein oder zwei mal getestet.
Ja bei "printer definitions"
Mfg
Wolfgang
Erfahrungen kann man leider schlecht weiter geben, die muss man selber machen.
Hatte der Snapper nicht auch so eine Stelle wo dem die Achsen definiert wurden... ? Ich hab den leider nur ein oder zwei mal getestet.
Ja bei "printer definitions"
Mfg
Wolfgang
| Aller Anfang war schwer - Wolfstrap | Reprap-fab.org | |
Erfahrungen kann man leider schlecht weiter geben, die muss man selber machen.
|
Re: Stromversorgung Mainboard? January 03, 2011 03:56PM |
Registered: 14 years ago Posts: 176 |
Den Tab gibt es bei mir gar nicht, da is wohl beim compilieren was verloren gegangen...
allerdings löst das erstmal nicht mein z-Achsen Problem..
Edited 1 time(s). Last edit at 01/03/2011 03:57PM by goaran.
my projects: [www.robotik.dyyyh.de] ...
allerdings löst das erstmal nicht mein z-Achsen Problem..
Edited 1 time(s). Last edit at 01/03/2011 03:57PM by goaran.
my projects: [www.robotik.dyyyh.de] ...
|
Re: Stromversorgung Mainboard? January 03, 2011 04:08PM |
Registered: 14 years ago Posts: 7,505 |
Hmm... warum nicht ?
Edited 1 time(s). Last edit at 01/03/2011 04:09PM by Stoffel15.
Mfg
Wolfgang
Erfahrungen kann man leider schlecht weiter geben, die muss man selber machen.

Edited 1 time(s). Last edit at 01/03/2011 04:09PM by Stoffel15.
Mfg
Wolfgang
| Aller Anfang war schwer - Wolfstrap | Reprap-fab.org | |
Erfahrungen kann man leider schlecht weiter geben, die muss man selber machen.
|
Re: Stromversorgung Mainboard? January 03, 2011 04:10PM |
Registered: 14 years ago Posts: 176 |
Die Achse fährt immer langsam unabhängig von der Hostsoftware (repraphost sowie repsnapper) das liegt also an der Firmware denke ich ??
my projects: [www.robotik.dyyyh.de] ...
my projects: [www.robotik.dyyyh.de] ...
|
Re: Stromversorgung Mainboard? January 03, 2011 04:19PM |
Registered: 14 years ago Posts: 7,505 |
das glaub ich nicht...
Die Z-Achse ist immer langsamer gestellt in der Software, weil die in unseren Maschinen eine andere Übersetzung hat und die auch keine Geschwindigkeit braucht.
Hattest du das mal mit der Schrittmotor Testsoftware getestet ? Da müßten sie sich dann alle gleich verhalten. In der Firmware ist nur der Block den du gepostst hattest für die Achsen zuständig. Alles andere nicht. Configuration.h
Sonst wüste ich im Moment aber auch nix mehr.
Mfg
Wolfgang
Erfahrungen kann man leider schlecht weiter geben, die muss man selber machen.
Die Z-Achse ist immer langsamer gestellt in der Software, weil die in unseren Maschinen eine andere Übersetzung hat und die auch keine Geschwindigkeit braucht.
Hattest du das mal mit der Schrittmotor Testsoftware getestet ? Da müßten sie sich dann alle gleich verhalten. In der Firmware ist nur der Block den du gepostst hattest für die Achsen zuständig. Alles andere nicht. Configuration.h
Sonst wüste ich im Moment aber auch nix mehr.
Mfg
Wolfgang
| Aller Anfang war schwer - Wolfstrap | Reprap-fab.org | |
Erfahrungen kann man leider schlecht weiter geben, die muss man selber machen.

{kind=link}
{kind=link}
Sorry, you do not have permission to post/reply in this forum.