Home
>
RepRap User Groups
>
Europe
>
Italy RepRap User Group - Gruppo RepRap Italia
>
Elettronica e meccanica
>
Topic
>
Page 4
PiBot Optical Reflection Endstop 
Posted by MagoKimbra
|
Re: PiBot Optical Reflection Endstop October 22, 2015 11:45AM |
Registered: 8 years ago Posts: 33 |
Ciao a tutti!!
E' da un paio di giorni che sto dietro alla configurazione di questo sensore, ma non ne vengo a capo...
Riscontro diverse problematiche nonostante seguo scrupolosamente la guida relativa all'ABL del mago e le sue indicazioni presenti su questo tread..
Come macchina ho una cartesiana con elettronica classcia arduino e ramps (probabilmente cinese)..
Ad esempio non riesco ad impartirgli il coando M48 in Repetier.. (ho appena scoperto che invece mastica M49)
Inoltre se dal display faccio bed setting, la stampante fa la home ma poi il display rimane vuoto fino a che non gli do un altro comando da Repetier o aspetto qualche decina di secondi.. come firmware uso il kimbra ovviamente..
Qualche anima pia in grado di spiegarmi quale passaggio sbaglio?
E' da un paio di giorni che sto dietro alla configurazione di questo sensore, ma non ne vengo a capo...
Riscontro diverse problematiche nonostante seguo scrupolosamente la guida relativa all'ABL del mago e le sue indicazioni presenti su questo tread..
Come macchina ho una cartesiana con elettronica classcia arduino e ramps (probabilmente cinese)..
Ad esempio non riesco ad impartirgli il coando M48 in Repetier.. (ho appena scoperto che invece mastica M49)
Inoltre se dal display faccio bed setting, la stampante fa la home ma poi il display rimane vuoto fino a che non gli do un altro comando da Repetier o aspetto qualche decina di secondi.. come firmware uso il kimbra ovviamente..
Qualche anima pia in grado di spiegarmi quale passaggio sbaglio?
|
Re: PiBot Optical Reflection Endstop October 24, 2015 01:54PM |
Registered: 9 years ago Posts: 860 |
Allora rientrato dal maker mi rimetto anche io a sistemare la mia R2 poi tocchera alla Kossel
Partimo dalle origini e ok cosi cone FW per usare il Pibot collegato a Zmin e attuale micro meccanico di Zmin collegato a Zmax in modo che venga usato come estracorsa in caso non andasse il Pibot ?
Ho accorcato in questo modo
Quindi adesso che devo fare giro il potenziometro finche non si spegne mentre ugello e a contatto con il piatto ?
Scusate ma preferisco chiedere prima di far danni
Grazie
Edited 1 time(s). Last edit at 10/24/2015 02:02PM by saviothecnic.
www.saviot.com Stampante Prusa I3 R2.2 By Nicola P.
Ramps 1.4 Con FW MarlinKimba Fusore HE IeC 1.75mm Con Flusso Canalizzatore Estrusori BullDog XL
Piano maggiorato 240*311mm pilotato da SSR 24V con letto scaldante autocostruito
Lavori in Corso Prossimetro Autolivellamento Z Gestione Remota Raspberry PI 2 con OctoPrint
Rilevamento ottico Fine Filo Illuminazione e Visione AreaStampa Remotata In costruzione Trafilatore TL-Plastic
Partimo dalle origini e ok cosi cone FW per usare il Pibot collegato a Zmin e attuale micro meccanico di Zmin collegato a Zmax in modo che venga usato come estracorsa in caso non andasse il Pibot ?

Ho accorcato in questo modo

Quindi adesso che devo fare giro il potenziometro finche non si spegne mentre ugello e a contatto con il piatto ?

Scusate ma preferisco chiedere prima di far danni
Grazie
Edited 1 time(s). Last edit at 10/24/2015 02:02PM by saviothecnic.
www.saviot.com Stampante Prusa I3 R2.2 By Nicola P.
Ramps 1.4 Con FW MarlinKimba Fusore HE IeC 1.75mm Con Flusso Canalizzatore Estrusori BullDog XL
Piano maggiorato 240*311mm pilotato da SSR 24V con letto scaldante autocostruito
Lavori in Corso Prossimetro Autolivellamento Z Gestione Remota Raspberry PI 2 con OctoPrint
Rilevamento ottico Fine Filo Illuminazione e Visione AreaStampa Remotata In costruzione Trafilatore TL-Plastic
|
Re: PiBot Optical Reflection Endstop October 25, 2015 01:52AM |
Registered: 10 years ago Posts: 6,409 |
Ma perchè tutti quei giri di pin,lascia su zmin l'endstop meccanico e metti la probe su zmax...
regola il trimmer in modo che la luce blu si accenda quando il nozzle sia a 3/5 mm dal piatto..
Controlla sempre il funzionamento con m119.
COMPRA ITALIANO - sostieni le nostre aziende - sostieni la nostra gente - sostieni il tuo popolo - sosterrai te stesso.
Alberto C. felice possessore di una Kossel K2
My Blog - My Thingiverse
regola il trimmer in modo che la luce blu si accenda quando il nozzle sia a 3/5 mm dal piatto..
Controlla sempre il funzionamento con m119.
COMPRA ITALIANO - sostieni le nostre aziende - sostieni la nostra gente - sostieni il tuo popolo - sosterrai te stesso.
Alberto C. felice possessore di una Kossel K2
My Blog - My Thingiverse
|
Re: PiBot Optical Reflection Endstop October 25, 2015 10:01AM |
Registered: 9 years ago Posts: 860 |
Scusa non ho premesso questo giro di PIN perche voglio lasciarmi Libero Zin e Max in caso voglio montare LCD seriale comunque parte elettrica tutto OK
Ho usato X e Y Max per i segnali di probe e Zmin
Home OK
M119 OK
E anche G29 ok
Quando lo lancio si fa il giro della griglia e rimane poi fermo con il probe on sul ultimo punto della griglia
Pero M48 non mi fa nulla ?
E da quando ho abilitato ABSL tutto il sistema è stranamente lento
RH è sempre in attesa comandi se voglio per esempio dare il comando 1 mm + o - in Z ma in qualsiasi asse passano due secondi mentre il sistema registra il comando e lo esegue
E inidializzazione del SD va in errore ma quello lo vedo dopo magari nel ultima mod e cambiato qualcosa nella gestioen SD poi provo gli altri parametri
:Edit
Ok adesso M48 va dovevo flaggare anche Enable Z-Probe repeatability test
Ma lo fa solo su un punto non girando tutto il piatto ed è durato pochi minuti leggevo che durava ore dove sbaglio ?
Edited 1 time(s). Last edit at 10/25/2015 12:42PM by saviothecnic.
www.saviot.com Stampante Prusa I3 R2.2 By Nicola P.
Ramps 1.4 Con FW MarlinKimba Fusore HE IeC 1.75mm Con Flusso Canalizzatore Estrusori BullDog XL
Piano maggiorato 240*311mm pilotato da SSR 24V con letto scaldante autocostruito
Lavori in Corso Prossimetro Autolivellamento Z Gestione Remota Raspberry PI 2 con OctoPrint
Rilevamento ottico Fine Filo Illuminazione e Visione AreaStampa Remotata In costruzione Trafilatore TL-Plastic
Ho usato X e Y Max per i segnali di probe e Zmin
Home OK
M119 OK
E anche G29 ok
Quando lo lancio si fa il giro della griglia e rimane poi fermo con il probe on sul ultimo punto della griglia
Pero M48 non mi fa nulla ?
E da quando ho abilitato ABSL tutto il sistema è stranamente lento
RH è sempre in attesa comandi se voglio per esempio dare il comando 1 mm + o - in Z ma in qualsiasi asse passano due secondi mentre il sistema registra il comando e lo esegue
E inidializzazione del SD va in errore ma quello lo vedo dopo magari nel ultima mod e cambiato qualcosa nella gestioen SD poi provo gli altri parametri
:Edit
Ok adesso M48 va dovevo flaggare anche Enable Z-Probe repeatability test
Ma lo fa solo su un punto non girando tutto il piatto ed è durato pochi minuti leggevo che durava ore dove sbaglio ?
17:36:45.388 : echo: M48 Z-Probe Repeatability test 17:36:48.964 : echo: deploy_z_probe > current_position: (178.01, 178.00, 19.46) 17:36:48.968 : echo: setup_for_endstop_move > enable_endstops(true) 17:36:59.785 : echo: run_z_probe > current_position: (178.01, 178.00, -0.51) 17:37:03.397 : echo: do_blocking_move_to: (178.01, 178.00, 9.49) 17:37:03.401 : echo: setup_for_endstop_move > enable_endstops(true) 17:37:10.520 : echo: run_z_probe > current_position: (178.01, 178.00, -0.53) 17:37:14.198 : echo: do_blocking_move_to: (178.01, 178.00, 9.49) 17:37:14.202 : echo: setup_for_endstop_move > enable_endstops(true) 17:37:21.321 : echo: run_z_probe > current_position: (178.01, 178.00, -0.53) 17:37:24.983 : echo: do_blocking_move_to: (178.01, 178.00, 9.49) 17:37:24.987 : echo: setup_for_endstop_move > enable_endstops(true) 17:37:32.105 : echo: run_z_probe > current_position: (178.01, 178.00, -0.52) 17:37:35.681 : echo: do_blocking_move_to: (178.01, 178.00, 9.49) 17:37:35.689 : echo: setup_for_endstop_move > enable_endstops(true) 17:37:42.906 : echo: run_z_probe > current_position: (178.01, 178.00, -0.52) 17:37:46.486 : echo: do_blocking_move_to: (178.01, 178.00, 9.49) 17:37:46.490 : echo: setup_for_endstop_move > enable_endstops(true) 17:37:53.690 : echo: run_z_probe > current_position: (178.01, 178.00, -0.52) 17:37:57.266 : echo: do_blocking_move_to: (178.01, 178.00, 9.49) 17:37:57.274 : echo: setup_for_endstop_move > enable_endstops(true) 17:38:04.471 : echo: run_z_probe > current_position: (178.01, 178.00, -0.53) 17:38:08.050 : echo: do_blocking_move_to: (178.01, 178.00, 9.49) 17:38:08.054 : echo: setup_for_endstop_move > enable_endstops(true) 17:38:15.173 : echo: run_z_probe > current_position: (178.01, 178.00, -0.53) 17:38:18.851 : echo: do_blocking_move_to: (178.01, 178.00, 9.49) 17:38:18.855 : echo: setup_for_endstop_move > enable_endstops(true) 17:38:25.974 : echo: run_z_probe > current_position: (178.01, 178.00, -0.52) 17:38:29.553 : echo: do_blocking_move_to: (178.01, 178.00, 9.49) 17:38:29.557 : echo: setup_for_endstop_move > enable_endstops(true) 17:38:36.775 : echo: run_z_probe > current_position: (178.01, 178.00, -0.52) 17:38:40.354 : echo: do_blocking_move_to: (178.01, 178.00, 9.49) 17:38:40.358 : echo: setup_for_endstop_move > enable_endstops(true) 17:38:47.558 : echo: run_z_probe > current_position: (178.01, 178.00, -0.53) 17:38:51.139 : echo: stow_z_probe > current_position: (178.01, 178.00, -0.53) 17:38:52.143 : echo: setup_for_endstop_move > enable_endstops(false) 17:38:52.147 : Mean: -0.526750 17:38:52.147 : Standard Deviation: 0.004548

Edited 1 time(s). Last edit at 10/25/2015 12:42PM by saviothecnic.
www.saviot.com Stampante Prusa I3 R2.2 By Nicola P.
Ramps 1.4 Con FW MarlinKimba Fusore HE IeC 1.75mm Con Flusso Canalizzatore Estrusori BullDog XL
Piano maggiorato 240*311mm pilotato da SSR 24V con letto scaldante autocostruito
Lavori in Corso Prossimetro Autolivellamento Z Gestione Remota Raspberry PI 2 con OctoPrint
Rilevamento ottico Fine Filo Illuminazione e Visione AreaStampa Remotata In costruzione Trafilatore TL-Plastic
|
Re: PiBot Optical Reflection Endstop October 25, 2015 02:07PM |
Registered: 10 years ago Posts: 6,409 |
Primo nessuna modifica sulla SD è rimasto tutto com'era...
Si dopo aver fatto i test rimane sul'ultimo punto perché non dovrebbe??
M48 repeteability test fa una serie di test su un punto per verificare se la sonda funziona a dovere, dove hai letto che ci mette ore??? Semmai quello è G30 A per la Kossel!!!
Impossibile che la sd non va su ramps 1.4 e arduino mega tutto è come prima...
COMPRA ITALIANO - sostieni le nostre aziende - sostieni la nostra gente - sostieni il tuo popolo - sosterrai te stesso.
Alberto C. felice possessore di una Kossel K2
My Blog - My Thingiverse
Si dopo aver fatto i test rimane sul'ultimo punto perché non dovrebbe??
M48 repeteability test fa una serie di test su un punto per verificare se la sonda funziona a dovere, dove hai letto che ci mette ore??? Semmai quello è G30 A per la Kossel!!!
Impossibile che la sd non va su ramps 1.4 e arduino mega tutto è come prima...
COMPRA ITALIANO - sostieni le nostre aziende - sostieni la nostra gente - sostieni il tuo popolo - sosterrai te stesso.
Alberto C. felice possessore di una Kossel K2
My Blog - My Thingiverse
|
Re: PiBot Optical Reflection Endstop October 25, 2015 03:55PM |
Registered: 9 years ago Posts: 860 |
Scusate confermo non so cosa sia sucesso si deve essere incartato il mio arduinoQuote
MagoKimbra
Primo nessuna modifica sulla SD è rimasto tutto com'era...
Gli ho ricaricato un vecchio fw e poi lostesso e adesso SD tutto OK
Credevo che alla fine si alzava fino a perdere il contatto come fa con lo Z che lo prende lo perde lo riprende e poi appena lo riperde e si fermaQuote
MagoKimbra
Si dopo aver fatto i test rimane sul'ultimo punto perché non dovrebbe??
E si mi sono confuso con quello per la Kossel allora be allora posso dire che funziona tutto a primo colo eccezzionaleQuote
MagoKimbra
M48 repeteability test fa una serie di test su un punto per verificare se la sonda funziona a dovere, dove hai letto che ci mette ore??? Semmai quello è G30 A per la Kossel!!!
Comunque a me non va bene con il nastro blui e lacca legge valori diversi in giro per il piano

Quindi la sequenza è questa:
M119 verifico che i finecorsa siano ok
G28 home generale
G29 verifica dei vari punti del piatto
M48 verifica riperibilita della lettura sensore
Diciamo che il sensore si attiva luce blu a 5mm tra ugello e piatto in che modo gli dico che deve scendere dicamo 4.95mm ?
Con il potenziomentro non si ha questa finezza mi sembra leggendo i tuoi post dietro una qualcosa con M666 P
ma non mi è chiaro come e dopo in quale casella del FW metto questo parametro in modo fisso oltre che salvarlo al volo sulla EEprom
Grazie
www.saviot.com Stampante Prusa I3 R2.2 By Nicola P.
Ramps 1.4 Con FW MarlinKimba Fusore HE IeC 1.75mm Con Flusso Canalizzatore Estrusori BullDog XL
Piano maggiorato 240*311mm pilotato da SSR 24V con letto scaldante autocostruito
Lavori in Corso Prossimetro Autolivellamento Z Gestione Remota Raspberry PI 2 con OctoPrint
Rilevamento ottico Fine Filo Illuminazione e Visione AreaStampa Remotata In costruzione Trafilatore TL-Plastic
|
Re: PiBot Optical Reflection Endstop October 26, 2015 02:41AM |
Registered: 10 years ago Posts: 6,409 |
Il pibot è più preciso a distanze tra i 7 e 10 mm quindi aumenta un po con il trimmer la distanza a cui rileva...
Con l'offset regoli poi di quanto deve scendere per far si che il nozzle sia sul piatto: M666 L leggi il valore attuale, M666 P cambi il valore. Ricordati che deve essere negativo.
COMPRA ITALIANO - sostieni le nostre aziende - sostieni la nostra gente - sostieni il tuo popolo - sosterrai te stesso.
Alberto C. felice possessore di una Kossel K2
My Blog - My Thingiverse
Con l'offset regoli poi di quanto deve scendere per far si che il nozzle sia sul piatto: M666 L leggi il valore attuale, M666 P cambi il valore. Ricordati che deve essere negativo.
COMPRA ITALIANO - sostieni le nostre aziende - sostieni la nostra gente - sostieni il tuo popolo - sosterrai te stesso.
Alberto C. felice possessore di una Kossel K2
My Blog - My Thingiverse
|
Re: PiBot Optical Reflection Endstop October 26, 2015 02:50AM |
Registered: 9 years ago Posts: 860 |
A ecco dove ho sbagliato ho cercato di tarare tutto con il trimer e forse ho abbassato troppo la sensibilitaQuote
MagoKimbra
Il pibot è più preciso a distanze tra i 7 e 10 mm quindi aumenta un po con il trimmer la distanza a cui rileva...
Con l'offset regoli poi di quanto deve scendere per far si che il nozzle sia sul piatto: M666 L leggi il valore attuale, M666 P cambi il valore. Ricordati che deve essere negativo.
Quindi la strada giusta invece è inversa lasciare una bella potrnza con il trimmer per rilevvare a distanza piu alta e poi andare di offset
era questo che non mi era chiaro uso del M666
Quindi diciamo quando ho il led blu acceso mando un M666 L lui di dara un valore in Z
io misurando quando manca hai 0,05mm del foglio gli rido un M666 P con il valore di Z sotratta la distanza in eccesso esatto ?
E poi questo valore lo metto nel FW nella casella Z probe offset from nozzle
Ho capito bene ?
Stasera appena arrivo a casa provo
Questa la prova che ho fatto ieri
Grazie
www.saviot.com Stampante Prusa I3 R2.2 By Nicola P.
Ramps 1.4 Con FW MarlinKimba Fusore HE IeC 1.75mm Con Flusso Canalizzatore Estrusori BullDog XL
Piano maggiorato 240*311mm pilotato da SSR 24V con letto scaldante autocostruito
Lavori in Corso Prossimetro Autolivellamento Z Gestione Remota Raspberry PI 2 con OctoPrint
Rilevamento ottico Fine Filo Illuminazione e Visione AreaStampa Remotata In costruzione Trafilatore TL-Plastic
|
Re: PiBot Optical Reflection Endstop October 26, 2015 03:04AM |
Registered: 10 years ago Posts: 6,409 |
No con m666 setti solo l'offset, per vedere i valori di Z dai m114 V.
COMPRA ITALIANO - sostieni le nostre aziende - sostieni la nostra gente - sostieni il tuo popolo - sosterrai te stesso.
Alberto C. felice possessore di una Kossel K2
My Blog - My Thingiverse
COMPRA ITALIANO - sostieni le nostre aziende - sostieni la nostra gente - sostieni il tuo popolo - sosterrai te stesso.
Alberto C. felice possessore di una Kossel K2
My Blog - My Thingiverse
|
Re: PiBot Optical Reflection Endstop October 26, 2015 01:01PM |
Registered: 9 years ago Posts: 860 |
:Edit sembra che ho capito ho giocato con i comandi M666 e messo poi impostazione nel FW e sembra che va
Domanda ma adesso è Ok il Gcode di inizio cosi ?
#define min_software_endstops false in configuration_cartesian
Lo chiedo perche non trovo questa righa nel FW Dev 4.2.0 ?
Ok allora dato il m114 V
Ho questo risultato
Adesso ho Z circa 5mm piu un alto rispetto al piano che devo fare ?
Nel FW in Z probe offset from nozzle mettere valore -5 ?
G28 mi da
Il G29
M48
Edited 1 time(s). Last edit at 10/26/2015 02:11PM by saviothecnic.
www.saviot.com Stampante Prusa I3 R2.2 By Nicola P.
Ramps 1.4 Con FW MarlinKimba Fusore HE IeC 1.75mm Con Flusso Canalizzatore Estrusori BullDog XL
Piano maggiorato 240*311mm pilotato da SSR 24V con letto scaldante autocostruito
Lavori in Corso Prossimetro Autolivellamento Z Gestione Remota Raspberry PI 2 con OctoPrint
Rilevamento ottico Fine Filo Illuminazione e Visione AreaStampa Remotata In costruzione Trafilatore TL-Plastic
Domanda ma adesso è Ok il Gcode di inizio cosi ?
; Default start code
M80 ; Accendi alimentatore
{IF_EXT0}M104 T0 S{TEMP0}
{IF_EXT1}M104 T1 S{TEMP1}
{IF_EXT2}M104 T2 S{TEMP2}
{IF_EXT3}M104 T3 S{TEMP3}
G28 ; Home
G29 ; Autobed level
G0 X0 Y0 Z5 F8000 ; Out plane
{IF_BED}M190 S{BED}
M107 ; Turn off fan
G90 ; Absolute positioning
M82 ; Extruder in absolute mode
G92 E0 ; Reset extruder position
; Wait for all used extruders to reach temperature
{IF_EXT0}M109 T0 S{TEMP0}
{IF_EXT1}M109 T1 S{TEMP1}
{IF_EXT2}M109 T2 S{TEMP2}
{IF_EXT3}M109 T3 S{TEMP3}
Domanda ma devo settarlo questo aprametro che avevo letto in un altor topic ?Quote
MagoKimbra
No con m666 setti solo l'offset, per vedere i valori di Z dai m114 V.
#define min_software_endstops false in configuration_cartesian
Lo chiedo perche non trovo questa righa nel FW Dev 4.2.0 ?
Ok allora dato il m114 V
Ho questo risultato
18:00:24.851 : N473 M114 V *113 18:00:24.857 : echo: N473 M114 V *113 18:00:24.865 : ok X:178.00 Y:178.01 Z:1.00 E:0.00 Count X: 178.00 Y:178.01 Z:1.00 18:00:24.869 : echo: X:178.00 Y:178.01 Z:1.00 E:0.00 Count X: 178.00 Y:178.01 Z:1.00 18:00:24.869 : ok
Adesso ho Z circa 5mm piu un alto rispetto al piano che devo fare ?
Nel FW in Z probe offset from nozzle mettere valore -5 ?
G28 mi da
17:50:50.781 : N185 G28 *63 17:50:50.825 : echo: N185 G28 *63 17:50:50.829 : echo: gcode_G28 >>> 17:50:50.834 : echo: setup_for_endstop_move > enable_endstops(true) 17:50:50.837 : echo: >>> homeaxis(0) 17:50:52.644 : echo: setup_for_endstop_move > enable_endstops(false) 17:50:52.734 : echo: setup_for_endstop_move > enable_endstops(true) 17:50:52.988 : echo: > TRIGGER ENDSTOP > current_position: (0.00, 0.00, 0.00) 17:50:52.996 : echo: set_axis_is_at_home 0 > (home_offset[axis]==0.00) > current_position: (0.00, 0.00, 0.00) 17:50:53.004 : echo: > AFTER set_axis_is_at_home > current_position: (0.00, 0.00, 0.00) 17:50:53.004 : echo: <<< homeaxis(0) 17:50:53.008 : echo: > homeX: (0.00, 0.00, 0.00) 17:50:53.012 : echo: >>> homeaxis(1) 17:50:55.044 : echo: setup_for_endstop_move > enable_endstops(false) 17:50:55.134 : echo: setup_for_endstop_move > enable_endstops(true) 17:50:55.392 : echo: > TRIGGER ENDSTOP > current_position: (0.00, 0.00, 0.00) 17:50:55.400 : echo: set_axis_is_at_home 1 > (home_offset[axis]==0.00) > current_position: (0.00, -22.00, 0.00) 17:50:55.404 : echo: > AFTER set_axis_is_at_home > current_position: (0.00, -22.00, 0.00) 17:50:55.408 : echo: <<< homeaxis(1) 17:50:55.412 : echo: > homeY: (0.00, -22.00, 0.00) 17:50:55.412 : echo: > Z_SAFE_HOMING >>> 17:50:55.425 : echo: Raise Z (before homing) by 10.00 > home_all_axis > current_position: (0.00, -22.00, 0.00) > home_all_axis > destination: (115.00, 144.00, 10.00) 17:50:58.091 : echo: >>> homeaxis(2) 17:50:59.819 : echo: setup_for_endstop_move > enable_endstops(false) 17:51:00.540 : echo: setup_for_endstop_move > enable_endstops(true) 17:51:01.888 : echo: > TRIGGER ENDSTOP > current_position: (115.00, 144.00, 0.00) 17:51:01.900 : echo: set_axis_is_at_home 2 > (home_offset[axis]==0.00) > current_position: (115.00, 144.00, 1.00) 17:51:01.904 : echo: > AFTER set_axis_is_at_home > current_position: (115.00, 144.00, 1.00) 17:51:01.908 : echo: <<< homeaxis(2) 17:51:01.908 : echo: <<< Z_SAFE_HOMING 17:51:01.912 : echo: setup_for_endstop_move > enable_endstops(false) 17:51:01.916 : echo: <<< gcode_G28 17:51:01.920 : ok X:115.00 Y:144.00 Z:1.00 E:0.00 Count X: 115.00 Y:144.00 Z:1.00 17:51:01.920 : ok
Il G29
17:51:48.870 : N230 G29 *51 17:51:48.875 : echo: N230 G29 *51 17:51:48.875 : echo: gcode_G29 >>> 17:51:48.879 : echo: G29 Auto Bed Leveling 17:51:48.883 : echo: setup_for_endstop_move > enable_endstops(true) 17:51:48.888 : echo: z_before = (before) 10.00 17:51:48.888 : echo: probe_pt >>> 17:51:48.896 : echo: > ProbeAction:1 > current_position: (115.00, 144.00, 1.00) 17:51:48.900 : echo: Z Raise to z_before 10.00 > do_blocking_move_to_z 10.00 17:51:48.904 : echo: do_blocking_move_to: (115.00, 144.00, 10.00) 17:51:51.963 : echo: > do_blocking_move_to_xy 178.00, 40.00 17:51:51.968 : echo: do_blocking_move_to: (178.00, 40.00, 10.00) 17:51:52.754 : echo: > ProbeDeploy 17:51:52.758 : echo: deploy_z_probe > current_position: (178.00, 40.00, 10.00) 17:51:59.476 : echo: run_z_probe > current_position: (178.00, 40.00, -3.73) 17:51:59.476 : echo: <<< probe_pt 17:51:59.480 : echo: z_before = (between) 6.27 17:51:59.480 : echo: probe_pt >>> 17:51:59.488 : echo: > ProbeAction:0 > current_position: (178.00, 40.00, -3.73) 17:51:59.492 : echo: Z Raise to z_before 6.27 > do_blocking_move_to_z 6.27 17:51:59.496 : echo: do_blocking_move_to: (178.00, 40.00, 6.27) 17:52:02.891 : echo: > do_blocking_move_to_xy 132.00, 40.00 17:52:02.895 : echo: do_blocking_move_to: (132.00, 40.00, 6.27) 17:52:08.654 : echo: run_z_probe > current_position: (132.00, 40.00, -3.69) 17:52:08.654 : echo: <<< probe_pt 17:52:08.658 : echo: z_before = (between) 6.31 17:52:08.658 : echo: probe_pt >>> 17:52:08.666 : echo: > ProbeAction:0 > current_position: (132.00, 40.00, -3.69) 17:52:08.670 : echo: Z Raise to z_before 6.31 > do_blocking_move_to_z 6.31 17:52:08.674 : echo: do_blocking_move_to: (132.00, 40.00, 6.31) 17:52:12.066 : echo: > do_blocking_move_to_xy 86.00, 40.00 17:52:12.070 : echo: do_blocking_move_to: (86.00, 40.00, 6.31) 17:52:17.817 : echo: run_z_probe > current_position: (86.00, 40.00, -3.62) 17:52:17.817 : echo: <<< probe_pt 17:52:17.821 : echo: z_before = (between) 6.38 17:52:17.821 : echo: probe_pt >>> 17:52:17.829 : echo: > ProbeAction:0 > current_position: (86.00, 40.00, -3.62) 17:52:17.833 : echo: Z Raise to z_before 6.38 > do_blocking_move_to_z 6.38 17:52:17.837 : echo: do_blocking_move_to: (86.00, 40.00, 6.38) 17:52:21.232 : echo: > do_blocking_move_to_xy 40.00, 40.00 17:52:21.236 : echo: do_blocking_move_to: (40.00, 40.00, 6.38) 17:52:27.155 : echo: run_z_probe > current_position: (40.00, 40.00, -3.91) 17:52:27.155 : echo: <<< probe_pt 17:52:27.159 : echo: z_before = (between) 6.09 17:52:27.159 : echo: probe_pt >>> 17:52:27.163 : echo: > ProbeAction:0 > current_position: (40.00, 40.00, -3.91) 17:52:27.171 : echo: Z Raise to z_before 6.09 > do_blocking_move_to_z 6.09 17:52:27.175 : echo: do_blocking_move_to: (40.00, 40.00, 6.09) 17:52:30.566 : echo: > do_blocking_move_to_xy 40.00, 86.00 17:52:30.570 : echo: do_blocking_move_to: (40.00, 86.00, 6.09) 17:52:36.453 : echo: run_z_probe > current_position: (40.00, 86.00, -4.26) 17:52:36.457 : echo: <<< probe_pt 17:52:36.457 : echo: z_before = (between) 5.74 17:52:36.461 : echo: probe_pt >>> 17:52:36.465 : echo: > ProbeAction:0 > current_position: (40.00, 86.00, -4.26) 17:52:36.469 : echo: Z Raise to z_before 5.74 > do_blocking_move_to_z 5.74 17:52:36.473 : echo: do_blocking_move_to: (40.00, 86.00, 5.74) 17:52:39.868 : echo: > do_blocking_move_to_xy 86.00, 86.00 17:52:39.872 : echo: do_blocking_move_to: (86.00, 86.00, 5.74) 17:52:44.955 : echo: run_z_probe > current_position: (86.00, 86.00, -2.14) 17:52:44.955 : echo: <<< probe_pt 17:52:44.959 : echo: z_before = (between) 7.86 17:52:44.959 : echo: probe_pt >>> 17:52:44.967 : echo: > ProbeAction:0 > current_position: (86.00, 86.00, -2.14) 17:52:44.972 : echo: Z Raise to z_before 7.86 > do_blocking_move_to_z 7.86 17:52:44.975 : echo: do_blocking_move_to: (86.00, 86.00, 7.86) 17:52:48.367 : echo: > do_blocking_move_to_xy 132.00, 86.00 17:52:48.371 : echo: do_blocking_move_to: (132.00, 86.00, 7.86) 17:52:54.368 : echo: run_z_probe > current_position: (132.00, 86.00, -2.80) 17:52:54.368 : echo: <<< probe_pt 17:52:54.372 : echo: z_before = (between) 7.20 17:52:54.372 : echo: probe_pt >>> 17:52:54.376 : echo: > ProbeAction:0 > current_position: (132.00, 86.00, -2.80) 17:52:54.384 : echo: Z Raise to z_before 7.20 > do_blocking_move_to_z 7.20 17:52:54.388 : echo: do_blocking_move_to: (132.00, 86.00, 7.20) 17:52:57.779 : echo: > do_blocking_move_to_xy 178.00, 86.00 17:52:57.783 : echo: do_blocking_move_to: (178.00, 86.00, 7.20) 17:53:03.870 : echo: run_z_probe > current_position: (178.00, 86.00, -3.54) 17:53:03.870 : echo: <<< probe_pt 17:53:03.874 : echo: z_before = (between) 6.46 17:53:03.878 : echo: probe_pt >>> 17:53:03.882 : echo: > ProbeAction:0 > current_position: (178.00, 86.00, -3.54) 17:53:03.886 : echo: Z Raise to z_before 6.46 > do_blocking_move_to_z 6.46 17:53:03.890 : echo: do_blocking_move_to: (178.00, 86.00, 6.46) 17:53:06.606 : echo: Now fresh file: INFO.CFG 17:53:06.623 : echo: Writing to file: INFO.CFG 17:53:07.328 : echo: > do_blocking_move_to_xy 178.00, 132.00 17:53:07.331 : echo: do_blocking_move_to: (178.00, 132.00, 6.46) 17:53:13.446 : echo: run_z_probe > current_position: (178.00, 132.00, -4.56) 17:53:13.446 : echo: <<< probe_pt 17:53:13.450 : echo: z_before = (between) 5.44 17:53:13.454 : echo: probe_pt >>> 17:53:13.458 : echo: > ProbeAction:0 > current_position: (178.00, 132.00, -4.56) 17:53:13.463 : echo: Z Raise to z_before 5.44 > do_blocking_move_to_z 5.44 17:53:13.467 : echo: do_blocking_move_to: (178.00, 132.00, 5.44) 17:53:16.862 : echo: > do_blocking_move_to_xy 132.00, 132.00 17:53:16.866 : echo: do_blocking_move_to: (132.00, 132.00, 5.44) 17:53:22.186 : echo: run_z_probe > current_position: (132.00, 132.00, -3.22) 17:53:22.190 : echo: <<< probe_pt 17:53:22.190 : echo: z_before = (between) 6.78 17:53:22.194 : echo: probe_pt >>> 17:53:22.198 : echo: > ProbeAction:0 > current_position: (132.00, 132.00, -3.22) 17:53:22.207 : echo: Z Raise to z_before 6.78 > do_blocking_move_to_z 6.78 17:53:22.210 : echo: do_blocking_move_to: (132.00, 132.00, 6.78) 17:53:25.603 : echo: > do_blocking_move_to_xy 86.00, 132.00 17:53:25.607 : echo: do_blocking_move_to: (86.00, 132.00, 6.78) 17:53:31.488 : echo: run_z_probe > current_position: (86.00, 132.00, -3.53) 17:53:31.488 : echo: <<< probe_pt 17:53:31.492 : echo: z_before = (between) 6.48 17:53:31.492 : echo: probe_pt >>> 17:53:31.501 : echo: > ProbeAction:0 > current_position: (86.00, 132.00, -3.53) 17:53:31.505 : echo: Z Raise to z_before 6.48 > do_blocking_move_to_z 6.48 17:53:31.509 : echo: do_blocking_move_to: (86.00, 132.00, 6.48) 17:53:34.900 : echo: > do_blocking_move_to_xy 40.00, 132.00 17:53:34.904 : echo: do_blocking_move_to: (40.00, 132.00, 6.48) 17:53:41.044 : echo: run_z_probe > current_position: (40.00, 132.00, -4.39) 17:53:41.044 : echo: <<< probe_pt 17:53:41.048 : echo: z_before = (between) 5.61 17:53:41.049 : echo: probe_pt >>> 17:53:41.057 : echo: > ProbeAction:0 > current_position: (40.00, 132.00, -4.39) 17:53:41.061 : echo: Z Raise to z_before 5.61 > do_blocking_move_to_z 5.61 17:53:41.065 : echo: do_blocking_move_to: (40.00, 132.00, 5.61) 17:53:44.460 : echo: > do_blocking_move_to_xy 40.00, 178.00 17:53:44.464 : echo: do_blocking_move_to: (40.00, 178.00, 5.61) 17:53:50.264 : echo: run_z_probe > current_position: (40.00, 178.00, -4.47) 17:53:50.264 : echo: <<< probe_pt 17:53:50.268 : echo: z_before = (between) 5.53 17:53:50.268 : echo: probe_pt >>> 17:53:50.276 : echo: > ProbeAction:0 > current_position: (40.00, 178.00, -4.47) 17:53:50.280 : echo: Z Raise to z_before 5.53 > do_blocking_move_to_z 5.53 17:53:50.284 : echo: do_blocking_move_to: (40.00, 178.00, 5.53) 17:53:53.679 : echo: > do_blocking_move_to_xy 86.00, 178.00 17:53:53.683 : echo: do_blocking_move_to: (86.00, 178.00, 5.53) 17:53:59.308 : echo: run_z_probe > current_position: (86.00, 178.00, -4.03) 17:53:59.312 : echo: <<< probe_pt 17:53:59.312 : echo: z_before = (between) 5.97 17:53:59.316 : echo: probe_pt >>> 17:53:59.320 : echo: > ProbeAction:0 > current_position: (86.00, 178.00, -4.03) 17:53:59.328 : echo: Z Raise to z_before 5.97 > do_blocking_move_to_z 5.97 17:53:59.332 : echo: do_blocking_move_to: (86.00, 178.00, 5.97) 17:54:02.723 : echo: > do_blocking_move_to_xy 132.00, 178.00 17:54:02.727 : echo: do_blocking_move_to: (132.00, 178.00, 5.97) 17:54:08.363 : echo: run_z_probe > current_position: (132.00, 178.00, -3.47) 17:54:08.363 : echo: <<< probe_pt 17:54:08.367 : echo: z_before = (between) 6.53 17:54:08.367 : echo: probe_pt >>> 17:54:08.375 : echo: > ProbeAction:2 > current_position: (132.00, 178.00, -3.47) 17:54:08.379 : echo: Z Raise to z_before 6.53 > do_blocking_move_to_z 6.53 17:54:08.383 : echo: do_blocking_move_to: (132.00, 178.00, 6.53) 17:54:11.779 : echo: > do_blocking_move_to_xy 178.00, 178.00 17:54:11.782 : echo: do_blocking_move_to: (178.00, 178.00, 6.53) 17:54:17.743 : echo: run_z_probe > current_position: (178.00, 178.00, -3.94) 17:54:17.747 : echo: > ProbeStow (stow_z_probe will do Z Raise) 17:54:17.751 : echo: stow_z_probe > current_position: (178.00, 178.00, -3.94) 17:54:17.751 : echo: <<< probe_pt 17:54:17.759 : echo: > probing complete > current_position: (178.00, 178.00, -3.94) 17:54:17.763 : echo: setup_for_endstop_move > enable_endstops(false) 17:54:17.784 : echo: Eqn coefficients: a: 0.00212431 b: -0.00314742 d: -3.59402823 17:54:17.788 : echo: planeNormal x: -0.002124 y: 0.003147 z: 1.000000 17:54:17.796 : echo: set_bed_level_equation_lsq > current_position: (177.99, 178.01, -3.75) 17:54:17.804 : echo: Bed Level Correction Matrix: 17:54:17.804 : echo: +0.999998 +0.000000 +0.002124 17:54:17.808 : echo: +0.000007 +0.999995 -0.003147 17:54:17.812 : echo: -0.002124 +0.003147 +0.999993 17:54:17.821 : echo: > AFTER apply_rotation_xyz > current_position[Z_AXIS]= -0.70586 17:54:17.821 : echo: <<< gcode_G29 17:54:17.829 : ok X:177.99 Y:178.01 Z:-0.71 E:0.00 Count X: 178.00 Y:178.01 Z:-0.89 17:54:17.829 : ok
M48
17:54:56.853 : N268 M48 *51 17:54:56.858 : echo: N268 M48 *51 17:54:56.862 : echo: M48 Z-Probe Repeatability test 17:55:00.257 : echo: deploy_z_probe > current_position: (178.00, 178.01, 9.11) 17:55:00.261 : echo: setup_for_endstop_move > enable_endstops(true) 17:55:05.749 : echo: run_z_probe > current_position: (178.00, 178.01, -0.90) 17:55:08.321 : echo: do_blocking_move_to: (178.00, 178.01, 9.10) 17:55:08.329 : echo: setup_for_endstop_move > enable_endstops(true) 17:55:13.761 : echo: run_z_probe > current_position: (178.00, 178.01, -0.90) 17:55:17.152 : echo: do_blocking_move_to: (178.00, 178.01, 9.10) 17:55:17.160 : echo: setup_for_endstop_move > enable_endstops(true) 17:55:22.591 : echo: run_z_probe > current_position: (178.00, 178.01, -0.90) 17:55:25.984 : echo: do_blocking_move_to: (178.00, 178.01, 9.10) 17:55:25.991 : echo: setup_for_endstop_move > enable_endstops(true) 17:55:31.419 : echo: run_z_probe > current_position: (178.00, 178.01, -0.89) 17:55:34.810 : echo: do_blocking_move_to: (178.00, 178.01, 9.10) 17:55:34.818 : echo: setup_for_endstop_move > enable_endstops(true) 17:55:36.923 : Communication timeout - reset send buffer block 17:55:40.257 : echo: run_z_probe > current_position: (178.00, 178.01, -0.90) 17:55:43.649 : echo: do_blocking_move_to: (178.00, 178.01, 9.10) 17:55:43.653 : echo: setup_for_endstop_move > enable_endstops(true) 17:55:49.104 : echo: run_z_probe > current_position: (178.00, 178.01, -0.90) 17:55:52.495 : echo: do_blocking_move_to: (178.00, 178.01, 9.10) 17:55:52.503 : echo: setup_for_endstop_move > enable_endstops(true) 17:55:57.979 : echo: run_z_probe > current_position: (178.00, 178.01, -0.89) 17:56:01.372 : echo: do_blocking_move_to: (178.00, 178.01, 9.10) 17:56:01.376 : echo: setup_for_endstop_move > enable_endstops(true) 17:56:06.876 : echo: run_z_probe > current_position: (178.00, 178.01, -0.90) 17:56:10.271 : echo: do_blocking_move_to: (178.00, 178.01, 9.10) 17:56:10.275 : echo: setup_for_endstop_move > enable_endstops(true) 17:56:15.760 : echo: run_z_probe > current_position: (178.00, 178.01, -0.90) 17:56:16.997 : Communication timeout - reset send buffer block 17:56:19.156 : echo: do_blocking_move_to: (178.00, 178.01, 9.10) 17:56:19.160 : echo: setup_for_endstop_move > enable_endstops(true) 17:56:24.652 : echo: run_z_probe > current_position: (178.00, 178.01, -0.91) 17:56:28.051 : echo: do_blocking_move_to: (178.00, 178.01, 9.10) 17:56:28.055 : echo: setup_for_endstop_move > enable_endstops(true) 17:56:33.543 : echo: run_z_probe > current_position: (178.00, 178.01, -0.91) 17:56:36.944 : echo: stow_z_probe > current_position: (178.00, 178.01, -0.91) 17:56:37.947 : echo: setup_for_endstop_move > enable_endstops(false) 17:56:37.947 : Mean: -0.898562 17:56:37.951 : Standard Deviation: 0.005870 17:56:37.951 : ok
Edited 1 time(s). Last edit at 10/26/2015 02:11PM by saviothecnic.
www.saviot.com Stampante Prusa I3 R2.2 By Nicola P.
Ramps 1.4 Con FW MarlinKimba Fusore HE IeC 1.75mm Con Flusso Canalizzatore Estrusori BullDog XL
Piano maggiorato 240*311mm pilotato da SSR 24V con letto scaldante autocostruito
Lavori in Corso Prossimetro Autolivellamento Z Gestione Remota Raspberry PI 2 con OctoPrint
Rilevamento ottico Fine Filo Illuminazione e Visione AreaStampa Remotata In costruzione Trafilatore TL-Plastic
|
Re: PiBot Optical Reflection Endstop October 26, 2015 03:59PM |
Registered: 10 years ago Posts: 6,409 |
Savio devi mettere l'offset in modo che scendendo a zero hai il nozzle sul piatto... M114 v ti restituisce un valore in funzione del offset che hai quindi se hai -5 ti restituisce 5 di Z dopo un g28...
Ma potrebbe essere che hai bisogno di scendere di più di 5 per arrivare al vero zero.
Io faccio cosi faccio g28 poi scendo e controllo se l'offset è giusto, potrebbe essere troppo o poco.
Se è poco quindi a Z0 hai il nozzle ancora alto rispetto al piatto aumento con M666 P e fai solo la home di Z con G28 Z.
Controlli e aggiusti e rifai con G28 Z fino a quando il nozzle a zero è sul piatto preciso...
Se è troppo cioè il nozzle è sul piatto, ma Z non è ancora arrivato a zero diminuisci l'offset e fai la stessa procedura come prima G28 Z correggi e riprovi fino a quando Z si ferma sul piatto a zero....
Alla fine memorizzi l'offset con M500 oppure lo metti nel fw e riscarichi....
COMPRA ITALIANO - sostieni le nostre aziende - sostieni la nostra gente - sostieni il tuo popolo - sosterrai te stesso.
Alberto C. felice possessore di una Kossel K2
My Blog - My Thingiverse
Ma potrebbe essere che hai bisogno di scendere di più di 5 per arrivare al vero zero.
Io faccio cosi faccio g28 poi scendo e controllo se l'offset è giusto, potrebbe essere troppo o poco.
Se è poco quindi a Z0 hai il nozzle ancora alto rispetto al piatto aumento con M666 P e fai solo la home di Z con G28 Z.
Controlli e aggiusti e rifai con G28 Z fino a quando il nozzle a zero è sul piatto preciso...
Se è troppo cioè il nozzle è sul piatto, ma Z non è ancora arrivato a zero diminuisci l'offset e fai la stessa procedura come prima G28 Z correggi e riprovi fino a quando Z si ferma sul piatto a zero....
Alla fine memorizzi l'offset con M500 oppure lo metti nel fw e riscarichi....
COMPRA ITALIANO - sostieni le nostre aziende - sostieni la nostra gente - sostieni il tuo popolo - sosterrai te stesso.
Alberto C. felice possessore di una Kossel K2
My Blog - My Thingiverse
|
Re: PiBot Optical Reflection Endstop October 27, 2015 04:36PM |
Registered: 8 years ago Posts: 33 |
Scusate, ma io non ci capisco più niente.....
a me non funzia nulla e ne ho provate di cotte e di crude...
questo è il mio configuration_cartesian.h
Il probe l'ho settato su Z_MAX, su Z_MIN ho il sensore magnetico..
Ho provato anche con #define Z_MIN_ENDSTOP_LOGIC true, ma da repetier non riesco ad andare in negativo, a meno che non invii io i comandi come g1 z-5 etc.. usando il pulsante e tramite mouse non combino nulla...
L'offset l'ho settato direttamente dal configuratore del firmware online ma se invio il comando M666 L mi ritorna sempre 0.00..
Dov'è che sbaglio? scusate se insisto, non voglio la pappa pronta, ma ci sto su da quasi 5 giorni e non ne vengo a capo...
a me non funzia nulla e ne ho provate di cotte e di crude...
questo è il mio configuration_cartesian.h
// Define this to set a custom name for your generic Mendel,
// Displayed in the LCD "Ready" message
#define CUSTOM_MACHINE_NAME "albo"
//===========================================================================
//=============================Mechanical Settings===========================
//===========================================================================
// coarse Endstop Settings
//#define ENDSTOPPULLUPS // Comment this out (using // at the start of the line) to disable the endstop pullup resistors
#ifndef ENDSTOPPULLUPS
// fine endstop settings: Individual pullups. will be ignored if ENDSTOPPULLUPS is defined
//#define ENDSTOPPULLUP_XMIN
//#define ENDSTOPPULLUP_YMIN
//#define ENDSTOPPULLUP_ZMIN
#define ENDSTOPPULLUP_Z2MIN
#define ENDSTOPPULLUP_XMAX
#define ENDSTOPPULLUP_YMAX
#define ENDSTOPPULLUP_ZMAX
#define ENDSTOPPULLUP_Z2MAX
#define ENDSTOPPULLUP_ZPROBE
#define ENDSTOPPULLUP_EMIN
#endif
// Mechanical endstop with COM to ground and NC to Signal uses "false" here (most common setup).
#define X_MIN_ENDSTOP_LOGIC false // set to true to invert the logic of the endstop.
#define Y_MIN_ENDSTOP_LOGIC false // set to true to invert the logic of the endstop.
#define Z_MIN_ENDSTOP_LOGIC false // set to true to invert the logic of the endstop.
#define Z2_MIN_ENDSTOP_LOGIC false // set to true to invert the logic of the endstop.
#define X_MAX_ENDSTOP_LOGIC false // set to true to invert the logic of the endstop.
#define Y_MAX_ENDSTOP_LOGIC false // set to true to invert the logic of the endstop.
#define Z_MAX_ENDSTOP_LOGIC false // set to true to invert the logic of the endstop.
#define Z2_MAX_ENDSTOP_LOGIC false // set to true to invert the logic of the endstop.
#define Z_PROBE_ENDSTOP_LOGIC false // set to true to invert the logic of the endstop.
#define E_MIN_ENDSTOP_LOGIC false // set to true to invert the logic of the endstop.
// ENDSTOP SETTINGS:
// Sets direction of endstop when homing; 1=MAX, -1=MIN
#define X_HOME_DIR -1
#define Y_HOME_DIR -1
#define Z_HOME_DIR -1
#define E_HOME_DIR -1
#define min_software_endstops false // If true, axis won't move to coordinates less than HOME_POS.
#define max_software_endstops false // If true, axis won't move to coordinates greater than the defined lengths below.
// For Inverting Stepper Enable Pins (Active Low) use 0, Non Inverting (Active High) use 1
#define X_ENABLE_ON 0
#define Y_ENABLE_ON 0
#define Z_ENABLE_ON 0
#define E_ENABLE_ON 0 // For all extruder
// Disables axis when it's not being used.
#define DISABLE_X false
#define DISABLE_Y false
#define DISABLE_Z false
#define DISABLE_E false // For all extruder
#define DISABLE_INACTIVE_EXTRUDER false //disable only inactive extruder and keep active extruder enabled
// Invert the stepper direction. Change (or reverse the motor connector) if an axis goes the wrong way.
#define INVERT_X_DIR true
#define INVERT_Y_DIR false
#define INVERT_Z_DIR true
#define INVERT_E0_DIR false
#define INVERT_E1_DIR false
#define INVERT_E2_DIR false
#define INVERT_E3_DIR false
// Travel limits after homing (units are in mm)
#define X_MAX_POS 150
#define X_MIN_POS 0
#define Y_MAX_POS 150
#define Y_MIN_POS 0
#define Z_MAX_POS 105
#define Z_MIN_POS 0
#define E_MIN_POS 0
//=====================================================================================
//============================= Bed Manual or Auto Leveling ===========================
//=====================================================================================
// set the rectangle in which to probe in manual or automatic
#define LEFT_PROBE_BED_POSITION 20
#define RIGHT_PROBE_BED_POSITION 130
#define FRONT_PROBE_BED_POSITION 20
#define BACK_PROBE_BED_POSITION 130
#define XY_TRAVEL_SPEED 10000 // X and Y axis travel speed between probes, in mm/min
//If you have enabled the Auto Bed Levelling and are using the same Z Probe for Z Homing,
//it is highly recommended you let this Z SAFE HOMING enabled!!!
#define Z_SAFE_HOMING
#ifdef Z_SAFE_HOMING
#define Z_SAFE_HOMING_X_POINT 75 // X point for Z homing when homing all axis (G28) or homing Z
#define Z_SAFE_HOMING_Y_POINT 75 // Y point for Z homing when homing all axis (G28) or homing Z
#endif
#define ENABLE_AUTO_BED_LEVELING // Delete the comment to enable (ABL)
#define Z_PROBE_REPEATABILITY_TEST // Delete the comment to enable
#ifdef ENABLE_AUTO_BED_LEVELING
// There are 2 different ways to specify probing locations
//
// - "grid" mode
// Probe several points in a rectangular grid.
// You specify the rectangle and the density of sample points.
// This mode is preferred because there are more measurements.
//
// - "3-point" mode
// Probe 3 arbitrary points on the bed (that aren't colinear)
// You specify the XY coordinates of all 3 points.
// Enable this to sample the bed in a grid (least squares solution)
// Note: this feature generates 10KB extra code size
#define AUTO_BED_LEVELING_GRID
#ifdef AUTO_BED_LEVELING_GRID
#define MIN_PROBE_EDGE 10 // The probe square sides can be no smaller than this
// Set the number of grid points per dimension
// You probably don't need more than 3 (squared=9)
#define AUTO_BED_LEVELING_GRID_POINTS 4
#else // not AUTO_BED_LEVELING_GRID
// Arbitrary points to probe. A simple cross-product
// is used to estimate the plane of the bed.
#define ABL_PROBE_PT_1_X 15
#define ABL_PROBE_PT_1_Y 180
#define ABL_PROBE_PT_2_X 15
#define ABL_PROBE_PT_2_Y 15
#define ABL_PROBE_PT_3_X 180
#define ABL_PROBE_PT_3_Y 15
#endif // AUTO_BED_LEVELING_GRID
// Offsets to the probe relative to the extruder tip (Hotend - Probe)
// X and Y offsets MUST be INTEGERS
#define X_PROBE_OFFSET_FROM_EXTRUDER 0 // Probe on: -left +right
#define Y_PROBE_OFFSET_FROM_EXTRUDER 0 // Probe on: -front +behind
#define Z_PROBE_OFFSET_FROM_EXTRUDER -7.95 // -below (always!)
#define Z_RAISE_BEFORE_HOMING 5 // (in mm) Raise Z before homing (G28) for Probe Clearance.
// Be sure you have this distance over your Z_MAX_POS in case
#define Z_RAISE_BEFORE_PROBING 5 // much the extruder will be raised before travelling to the first probing point.
#define Z_RAISE_BETWEEN_PROBINGS 5 // much the extruder will be raised when travelling from between next probing points
#define Z_RAISE_AFTER_PROBING 5 //How much the extruder will be raised after the last probing point.
//#define Z_PROBE_SLED // turn on if you have a z-probe mounted on a sled like those designed by Charles Bell
//#define SLED_DOCKING_OFFSET 5 // the extra distance the X axis must travel to pick up the sled. 0 should be fine but you can push it further if you'd like.
//If defined, the Probe servo will be turned on only during movement and then turned off to avoid jerk
//The value is the delay to turn the servo off after powered on - depends on the servo speed; 300ms is good value, but you can try lower it.
//You MUST HAVE the SERVO ENDSTOPS defined to use here a value higher than zero otherwise your code will not compile.
#define PROBE_SERVO_DEACTIVATION_DELAY 300
// Support for a dedicated Z PROBE endstop separate from the Z MIN endstop.
// If you would like to use both a Z PROBE and a Z MIN endstop together or just a Z PROBE with a custom pin, uncomment #define Z PROBE ENDSTOP and read the instructions below.
// If you want to still use the Z min endstop for homing, disable Z_SAFE_HOMING above. Eg; to park the head outside the bed area when homing with G28.
// WARNING: The Z MIN endstop will need to set properly as it would without a Z PROBE to prevent head crashes and premature stopping during a print.
// To use a separte Z PROBE endstop, you must have a Z_PROBE_PIN defined in the pins.h file for your control board.
// If you are using a servo based Z PROBE, you will need to enable NUM_SERVOS, SERVO_ENDSTOPS and SERVO_ENDSTOPS_ANGLES in the R/C Servo below.
// WARNING: Setting the wrong pin may have unexpected and potentially disastrous outcomes. Use with caution and do your homework.
#define Z_PROBE_ENDSTOP
#endif // ENABLE_AUTO_BED_LEVELING
// The position of the homing switches
//#define MANUAL_HOME_POSITIONS // If defined, MANUAL_*_HOME_POS below will be used
//#define BED_CENTER_AT_0_0 // If defined, the center of the bed is at (X=0, Y=0)
//Manual homing switch locations:
#ifdef MANUAL_HOME_POSITIONS
#define MANUAL_X_HOME_POS 0
#define MANUAL_Y_HOME_POS 0
#define MANUAL_Z_HOME_POS 0
#endif
// MOVEMENT SETTINGS
#define HOMING_FEEDRATE {50*60,50*60,6*60,0} // set the homing speeds (mm/min)
// default settings
#define DEFAULT_AXIS_STEPS_PER_UNIT {160,160,3200,160,625,625,625} // X, Y, Z, E0, E1, E2, E3 default steps per unit
#define DEFAULT_MAX_FEEDRATE {100,100,6,100,100,100,100} // X, Y, Z, E0, E1, E2, E3 (mm/sec)
#define DEFAULT_RETRACTION_MAX_FEEDRATE {150,100,100,100} // E0, E1, E2, E3 (mm/sec)
#define DEFAULT_MAX_ACCELERATION {1500,1500,50,1000,3000,3000,3000} // X, Y, Z, E0, E1, E2, E3 maximum start speed for accelerated moves.
#define DEFAULT_ACCELERATION 1500 // X, Y, Z and E max acceleration in mm/s^2 for printing moves
#define DEFAULT_RETRACT_ACCELERATION 5000 // E max acceleration in mm/s^2 for retracts
#define DEFAULT_TRAVEL_ACCELERATION 2000 // X, Y, Z acceleration in mm/s^2 for travel (non printing) moves
// Offset of the extruders (uncomment if using more than one and relying on firmware to position when changing).
// The offset has to be X=0, Y=0 for the extruder 0 hotend (default extruder).
// For the other hotends it is their distance from the extruder 0 hotend.
//#define HOTEND_OFFSET_X {0.0, 5.00, 0.0, 0.0} // (in mm) for each extruder, offset of the hotend on the X axis
//#define HOTEND_OFFSET_Y {0.0, 5.00, 0.0, 0.0} // (in mm) for each extruder, offset of the hotend on the Y axis
// The speed change that does not require acceleration (i.e. the software might assume it can be done instantaneously)
#define DEFAULT_XYJERK 10 // (mm/sec)
#define DEFAULT_ZJERK 0.4 // (mm/sec)
#define DEFAULT_EJERK 5 // (mm/sec)
//===========================================================================
//=============================Additional Features===========================
//===========================================================================
// Custom M code points
//#define CUSTOM_M_CODES
#ifdef CUSTOM_M_CODES
#define CUSTOM_M_CODE_SET_Z_PROBE_OFFSET 851
#define Z_PROBE_OFFSET_RANGE_MIN -20
#define Z_PROBE_OFFSET_RANGE_MAX 20
#endif
Il probe l'ho settato su Z_MAX, su Z_MIN ho il sensore magnetico..
Ho provato anche con #define Z_MIN_ENDSTOP_LOGIC true, ma da repetier non riesco ad andare in negativo, a meno che non invii io i comandi come g1 z-5 etc.. usando il pulsante e tramite mouse non combino nulla...
L'offset l'ho settato direttamente dal configuratore del firmware online ma se invio il comando M666 L mi ritorna sempre 0.00..
Dov'è che sbaglio? scusate se insisto, non voglio la pappa pronta, ma ci sto su da quasi 5 giorni e non ne vengo a capo...
|
Re: PiBot Optical Reflection Endstop October 28, 2015 02:58AM |
Registered: 9 years ago Posts: 860 |
Questo è strano ma che elettronica usi hai abilitato la EEprom ?Quote
almada
L'offset l'ho settato direttamente dal configuratore del firmware online ma se invio il comando M666 L mi ritorna sempre 0.00..
Dov'è che sbaglio? scusate se insisto, non voglio la pappa pronta, ma ci sto su da quasi 5 giorni e non ne vengo a capo...
Ho resettato arduino dopo aver caricato fw prima di lanciare RH ?
stai usando MalinKimba esatto che versione la Normale o la DEV ?
Io le prove le ho fatte con la DEV e configurando autoconfiguratore come da qualche immagine allegata su
A me tutto questo ha funzionato da subito i miei problemi erano solo sul fatot che non avevo capito come settarlo
 ma come funzionalita tutto ok da subito
ma come funzionalita tutto ok da subitowww.saviot.com Stampante Prusa I3 R2.2 By Nicola P.
Ramps 1.4 Con FW MarlinKimba Fusore HE IeC 1.75mm Con Flusso Canalizzatore Estrusori BullDog XL
Piano maggiorato 240*311mm pilotato da SSR 24V con letto scaldante autocostruito
Lavori in Corso Prossimetro Autolivellamento Z Gestione Remota Raspberry PI 2 con OctoPrint
Rilevamento ottico Fine Filo Illuminazione e Visione AreaStampa Remotata In costruzione Trafilatore TL-Plastic
|
Re: PiBot Optical Reflection Endstop October 28, 2015 03:42AM |
Registered: 8 years ago Posts: 33 |
uso una classica ramps abbinata arduino ovviamente, uso il kimbra normale, non mi sento assolutamente in grado di gestire una versione dedicata a developers, preferisco, almeno in questo ambito, usare una versione più stabile..
cmq no.. non ho (mai) resettato arduino.. quindi mi consigliate di fare un clear prima di caricare il kimbra?
Cmq posso confermarti che ho abilitato la EEprom, ma, a prescindere dal fatto che l'ho abilitata o meno, se setto direttamente dal configuratore l'offset, non dovrei rileggermi il valore di offset facendo m666?
cmq no.. non ho (mai) resettato arduino.. quindi mi consigliate di fare un clear prima di caricare il kimbra?
Cmq posso confermarti che ho abilitato la EEprom, ma, a prescindere dal fatto che l'ho abilitata o meno, se setto direttamente dal configuratore l'offset, non dovrei rileggermi il valore di offset facendo m666?
|
Re: PiBot Optical Reflection Endstop October 28, 2015 04:51AM |
Registered: 9 years ago Posts: 860 |
A volte puo tornare utile se lo smanetti molto alcune volte si incasina Arduino a me ad esempio non mi leggeva più SD ed andava lentissimo
Di prassi dopo caricato FW anche se lo fa già il software IDE io per sicurezza spegno tutto scollego la seriale rialimento pigio il bottone di reset sulla ramps e poi collego ed uso
Nella DEV ci sono molte cose in piu che nella stabile non ci sono per questo ti chiedevo magari prova giusto per curiosità
Comunque si "m666 l" ti dovrebbe dare il valore che hai settato nel fw occhio che non ricordo se vuole il punto o la virgola nel valore
Io per sicurezza do anche velocita di comunicazione piu bassa 115200 ansiche 250000
www.saviot.com Stampante Prusa I3 R2.2 By Nicola P.
Ramps 1.4 Con FW MarlinKimba Fusore HE IeC 1.75mm Con Flusso Canalizzatore Estrusori BullDog XL
Piano maggiorato 240*311mm pilotato da SSR 24V con letto scaldante autocostruito
Lavori in Corso Prossimetro Autolivellamento Z Gestione Remota Raspberry PI 2 con OctoPrint
Rilevamento ottico Fine Filo Illuminazione e Visione AreaStampa Remotata In costruzione Trafilatore TL-Plastic
Di prassi dopo caricato FW anche se lo fa già il software IDE io per sicurezza spegno tutto scollego la seriale rialimento pigio il bottone di reset sulla ramps e poi collego ed uso
Nella DEV ci sono molte cose in piu che nella stabile non ci sono per questo ti chiedevo magari prova giusto per curiosità
Comunque si "m666 l" ti dovrebbe dare il valore che hai settato nel fw occhio che non ricordo se vuole il punto o la virgola nel valore
Io per sicurezza do anche velocita di comunicazione piu bassa 115200 ansiche 250000
www.saviot.com Stampante Prusa I3 R2.2 By Nicola P.
Ramps 1.4 Con FW MarlinKimba Fusore HE IeC 1.75mm Con Flusso Canalizzatore Estrusori BullDog XL
Piano maggiorato 240*311mm pilotato da SSR 24V con letto scaldante autocostruito
Lavori in Corso Prossimetro Autolivellamento Z Gestione Remota Raspberry PI 2 con OctoPrint
Rilevamento ottico Fine Filo Illuminazione e Visione AreaStampa Remotata In costruzione Trafilatore TL-Plastic
|
Re: PiBot Optical Reflection Endstop October 28, 2015 06:58AM |
Registered: 8 years ago Posts: 167 |
Salve,
leggendovi non ho resistito e sono andato sul sito e li ho presi, quando arrivano chiederò qualche dritta.
Leggendo sempre il post ho visto che se il tema del metallo che aveva il sensore è stato
superato ci potrebbero però essere problemi di riflessione.
Io ho una R2 Pro con il lo specchio 300 x 200 credete che funzionerà.
Grazie
leggendovi non ho resistito e sono andato sul sito e li ho presi, quando arrivano chiederò qualche dritta.
Leggendo sempre il post ho visto che se il tema del metallo che aveva il sensore è stato
superato ci potrebbero però essere problemi di riflessione.
Io ho una R2 Pro con il lo specchio 300 x 200 credete che funzionerà.
Grazie
|
Re: PiBot Optical Reflection Endstop October 28, 2015 07:18AM |
Registered: 9 years ago Posts: 860 |
Se leggi la mia firma ho anche io una R2 con piano maggiorato classico spegghio e va sia con lo specchio che con il nastro blu e lacca
e anche il mago ha provato sia sulla R2 che sulla Kossel quindi su questo va tranquillo
www.saviot.com Stampante Prusa I3 R2.2 By Nicola P.
Ramps 1.4 Con FW MarlinKimba Fusore HE IeC 1.75mm Con Flusso Canalizzatore Estrusori BullDog XL
Piano maggiorato 240*311mm pilotato da SSR 24V con letto scaldante autocostruito
Lavori in Corso Prossimetro Autolivellamento Z Gestione Remota Raspberry PI 2 con OctoPrint
Rilevamento ottico Fine Filo Illuminazione e Visione AreaStampa Remotata In costruzione Trafilatore TL-Plastic
e anche il mago ha provato sia sulla R2 che sulla Kossel quindi su questo va tranquillo
www.saviot.com Stampante Prusa I3 R2.2 By Nicola P.
Ramps 1.4 Con FW MarlinKimba Fusore HE IeC 1.75mm Con Flusso Canalizzatore Estrusori BullDog XL
Piano maggiorato 240*311mm pilotato da SSR 24V con letto scaldante autocostruito
Lavori in Corso Prossimetro Autolivellamento Z Gestione Remota Raspberry PI 2 con OctoPrint
Rilevamento ottico Fine Filo Illuminazione e Visione AreaStampa Remotata In costruzione Trafilatore TL-Plastic
|
Re: PiBot Optical Reflection Endstop October 28, 2015 07:36AM |
Registered: 8 years ago Posts: 167 |

|
Re: PiBot Optical Reflection Endstop October 28, 2015 08:33AM |
Registered: 9 years ago Posts: 860 |
Ecco il files per il supporto PiBot che uso va bene se come nel mio caso ti agganci alla vite del supporto HE IeC
Sono partito modificando uno del Mago per la Kossel pero le mie incapacita nel disegno 3D non sono stato capace di fargli il foro
e la tasca dove escono i temrinali dei connettori per montarlo piatto ma bastano due bulloni distanziatori
Sarebbe anche da aggiungerci un trinangolo di rinforzo nella parte interna della curva altra cosa che non sono riuscito a fare
Se il mago o altri riesco a sistemerlo meglio ben venga
Grazie
www.saviot.com Stampante Prusa I3 R2.2 By Nicola P.
Ramps 1.4 Con FW MarlinKimba Fusore HE IeC 1.75mm Con Flusso Canalizzatore Estrusori BullDog XL
Piano maggiorato 240*311mm pilotato da SSR 24V con letto scaldante autocostruito
Lavori in Corso Prossimetro Autolivellamento Z Gestione Remota Raspberry PI 2 con OctoPrint
Rilevamento ottico Fine Filo Illuminazione e Visione AreaStampa Remotata In costruzione Trafilatore TL-Plastic
Sono partito modificando uno del Mago per la Kossel pero le mie incapacita nel disegno 3D non sono stato capace di fargli il foro
e la tasca dove escono i temrinali dei connettori per montarlo piatto ma bastano due bulloni distanziatori
Sarebbe anche da aggiungerci un trinangolo di rinforzo nella parte interna della curva altra cosa che non sono riuscito a fare
Se il mago o altri riesco a sistemerlo meglio ben venga
Grazie
www.saviot.com Stampante Prusa I3 R2.2 By Nicola P.
Ramps 1.4 Con FW MarlinKimba Fusore HE IeC 1.75mm Con Flusso Canalizzatore Estrusori BullDog XL
Piano maggiorato 240*311mm pilotato da SSR 24V con letto scaldante autocostruito
Lavori in Corso Prossimetro Autolivellamento Z Gestione Remota Raspberry PI 2 con OctoPrint
Rilevamento ottico Fine Filo Illuminazione e Visione AreaStampa Remotata In costruzione Trafilatore TL-Plastic
|
Re: PiBot Optical Reflection Endstop October 28, 2015 11:56AM |
Registered: 8 years ago Posts: 167 |
|
Re: PiBot Optical Reflection Endstop October 28, 2015 12:16PM |
Registered: 8 years ago Posts: 33 |
se è per questo ne esiste anche un altro nell'universo delle cose, a mio avviso migliore visto che include una copertura per i sensori, io ho preso spunto proprio da quello per inglobarlo in maniera screwless sulla piastra del carrello della mia stampante..
|
Re: PiBot Optical Reflection Endstop October 28, 2015 01:02PM |
Registered: 8 years ago Posts: 167 |
|
Re: PiBot Optical Reflection Endstop October 28, 2015 01:41PM |
Registered: 8 years ago Posts: 33 |
appunto.. il disegno su thingiverse è di un mio amico, io ho preso spunto prendendo le parti che mi interessavano e le ho inglobate nell'immagine che ho allegato prima..Quote
Labieno
Forse mi sbaglio, ma quelo su thingiverse sembra diverso dal disegno allegato.
Quote
almada
se è per questo ne esiste anche un altro nell'universo delle cose, a mio avviso migliore visto che include una copertura per i sensori, io ho preso spunto proprio da quello per inglobarlo in maniera screwless sulla piastra del carrello della mia stampante..
|
Re: PiBot Optical Reflection Endstop October 28, 2015 02:28PM |
Registered: 8 years ago Posts: 33 |
scusate il secondo post consecutivo..
Tornando alla mia problematica, ho seguito i consigli, ho resettato e ricaricato il fw, questa volta ho messo su il dev solo ed esclusivamente per verificare se anche qui avevo o meno problemi.. beh.. per ora sono al punto di partenza..
ho fatto un home XY verificato con m119 e mi da triggered
vado di home e mi manda in centro l'hotend e mi da questo:
19:24:02.346 : x_min: NOT TRIGGERED
19:24:02.350 : y_min: NOT TRIGGERED
19:24:02.350 : z_min: NOT TRIGGERED
19:24:02.350 : z_probe: TRIGGERED
Non vorrei dire una fesseria, ma a rigor di logica non dovrebbe darmi triggered anche la z_min?
il probe si trova su z_max..
e l'offset è sempre a -5 (anche se non sarebbe corretto..)
Tornando alla mia problematica, ho seguito i consigli, ho resettato e ricaricato il fw, questa volta ho messo su il dev solo ed esclusivamente per verificare se anche qui avevo o meno problemi.. beh.. per ora sono al punto di partenza..
ho fatto un home XY verificato con m119 e mi da triggered
vado di home e mi manda in centro l'hotend e mi da questo:
19:24:02.346 : x_min: NOT TRIGGERED
19:24:02.350 : y_min: NOT TRIGGERED
19:24:02.350 : z_min: NOT TRIGGERED
19:24:02.350 : z_probe: TRIGGERED
Non vorrei dire una fesseria, ma a rigor di logica non dovrebbe darmi triggered anche la z_min?
il probe si trova su z_max..
e l'offset è sempre a -5 (anche se non sarebbe corretto..)
|
Re: PiBot Optical Reflection Endstop October 28, 2015 02:58PM |
Registered: 11 years ago Posts: 415 |
scusate una domanda da niubbo.....
io in questo momento setto a mano il tutto e la mia stampante devo dire e iper precisa.... ora uso un sensore ottico sulla z...
ora su una seconda stampante volevo provare questo sensore....
diciamo che la stampante a il piatto sono perfettamente allineamenti su tutto....
attacco il sensore su un lato del carrello.... la z è a 0.01 preciso..... porto su il carrello di 7/10 mm e regolo il sensore che a quell'altezza di accenda .... ora detto cosi ..per il sensore è lo 0 anche se sono alto 7/10 mm nel reale
ora devo settare offset di 7/10 mm per dirgli che realmente poi deve scendere di questi mm per essere a 0.xxxxx con la punta del ugello.... (spero di aver capito bene)
e tengo il sensore ottico sempre in z min (il sensore lo metto in z max) come sensore di backup... ma mi sorge un dubbio.. se il mio sensore ottico e preciso a 0.01 il sensore ottico dovrebbe in teoria poterlo superare per una possibile regolazione ancora più precisa... ma se scende oltre non può perche il sensore ottico lo fermerebbe e questo 1 non mi permette una regolazione superprecisa del sensore ... 2 pero mi salva in caso il sensore non legge il piatto.... come posso settare il sensore ottico che e perfetto e dirgli no puoi scendere di piu ..... non so se mi spiego... oltre al sensore ottico spacco il piatto... ma questo potrebbe condizionare il sensore per una piu precisa regolazione... o sbaglio???
come impostare il sensore di backup in modo ottimo???
grazie
Edited 2 time(s). Last edit at 10/28/2015 03:02PM by lamerhouse.
io in questo momento setto a mano il tutto e la mia stampante devo dire e iper precisa.... ora uso un sensore ottico sulla z...
ora su una seconda stampante volevo provare questo sensore....
diciamo che la stampante a il piatto sono perfettamente allineamenti su tutto....
attacco il sensore su un lato del carrello.... la z è a 0.01 preciso..... porto su il carrello di 7/10 mm e regolo il sensore che a quell'altezza di accenda .... ora detto cosi ..per il sensore è lo 0 anche se sono alto 7/10 mm nel reale
ora devo settare offset di 7/10 mm per dirgli che realmente poi deve scendere di questi mm per essere a 0.xxxxx con la punta del ugello.... (spero di aver capito bene)
e tengo il sensore ottico sempre in z min (il sensore lo metto in z max) come sensore di backup... ma mi sorge un dubbio.. se il mio sensore ottico e preciso a 0.01 il sensore ottico dovrebbe in teoria poterlo superare per una possibile regolazione ancora più precisa... ma se scende oltre non può perche il sensore ottico lo fermerebbe e questo 1 non mi permette una regolazione superprecisa del sensore ... 2 pero mi salva in caso il sensore non legge il piatto.... come posso settare il sensore ottico che e perfetto e dirgli no puoi scendere di piu ..... non so se mi spiego... oltre al sensore ottico spacco il piatto... ma questo potrebbe condizionare il sensore per una piu precisa regolazione... o sbaglio???
come impostare il sensore di backup in modo ottimo???
grazie
Edited 2 time(s). Last edit at 10/28/2015 03:02PM by lamerhouse.
|
Re: PiBot Optical Reflection Endstop October 28, 2015 04:50PM |
Registered: 10 years ago Posts: 6,409 |
L'hai raccontata perfettamente e poi ti sei perso in un bicchiere d'acqua..
Gli end stop vengono attivati solo durante la home e non durante i movimenti normali quindi anche se si attiva l'ottico durante le fasi di movimento normale non viene rilevato dal fw. Durante la fase di home il pibot interviene 7/10 mm prima quindi sei apposto. Se succede per qualche motivo che il pibot non funzioni ecco che il sensore ottico su zmin ti salva il nozzle....
COMPRA ITALIANO - sostieni le nostre aziende - sostieni la nostra gente - sostieni il tuo popolo - sosterrai te stesso.
Alberto C. felice possessore di una Kossel K2
My Blog - My Thingiverse
Gli end stop vengono attivati solo durante la home e non durante i movimenti normali quindi anche se si attiva l'ottico durante le fasi di movimento normale non viene rilevato dal fw. Durante la fase di home il pibot interviene 7/10 mm prima quindi sei apposto. Se succede per qualche motivo che il pibot non funzioni ecco che il sensore ottico su zmin ti salva il nozzle....
COMPRA ITALIANO - sostieni le nostre aziende - sostieni la nostra gente - sostieni il tuo popolo - sosterrai te stesso.
Alberto C. felice possessore di una Kossel K2
My Blog - My Thingiverse
|
Re: PiBot Optical Reflection Endstop October 28, 2015 05:03PM |
Registered: 8 years ago Posts: 33 |
Intanto un GRAZIE per la risposta..Quote
MagoKimbra
L'hai raccontata perfettamente e poi ti sei perso in un bicchiere d'acqua..
Gli end stop vengono attivati solo durante la home e non durante i movimenti normali quindi anche se si attiva l'ottico durante le fasi di movimento normale non viene rilevato dal fw. Durante la fase di home il pibot interviene 7/10 mm prima quindi sei apposto. Se succede per qualche motivo che il pibot non funzioni ecco che il sensore ottico su zmin ti salva il nozzle....
Che mi crediate o meno ne ero appena venuto a capo.. circa mezzo minuto prima di ricevere la notifica della risposta tramite la mail..
L'ho capito digitando 4 stupidi caratteri in repetier.. G1 Z0 (cinque se consideriamo lo spazio)....
Fantastico..
Ma... ora chiedo.. se il piano non è perfettamente a bolla, come interviene ora la macchina?
questo è il risultato del ABL.. penso si possa notare una certa pendenza?!
22:00:45.082 : N284 G29 *60
22:00:45.086 : echo: gcode_G29 >>>
22:00:45.091 : echo: G29 Auto Bed Leveling
22:00:45.095 : echo: setup_for_endstop_move > enable_endstops(true)
22:00:45.099 : echo: z_before = (before) 5.00
22:00:45.099 : echo: probe_pt >>>
22:00:45.107 : echo: > ProbeAction:1 > current_position: (128.00, 128.00, 7.80)
22:00:45.111 : echo: Z Raise to z_before 5.00 > do_blocking_move_to_z 5.00
22:00:45.115 : echo: do_blocking_move_to: (128.00, 128.00, 5.00)
22:00:45.148 : echo: > do_blocking_move_to_xy 128.00, 20.00
22:00:45.152 : echo: do_blocking_move_to: (128.00, 20.00, 5.00)
22:00:46.299 : echo: > ProbeDeploy
22:00:46.307 : echo: deploy_z_probe > current_position: (128.00, 20.00, 5.00)
22:00:47.375 : echo: run_z_probe > current_position: (128.00, 20.00, 8.13)
22:00:47.380 : echo: <<< probe_pt
22:00:47.380 : echo: z_before = (between) 13.13
22:00:47.385 : echo: probe_pt >>>
22:00:47.389 : echo: > ProbeAction:0 > current_position: (128.00, 20.00, 8.13)
22:00:47.393 : echo: Z Raise to z_before 13.13 > do_blocking_move_to_z 13.13
22:00:47.397 : echo: do_blocking_move_to: (128.00, 20.00, 13.13)
22:00:48.351 : echo: > do_blocking_move_to_xy 92.00, 20.00
22:00:48.355 : echo: do_blocking_move_to: (92.00, 20.00, 13.13)
22:00:50.865 : echo: run_z_probe > current_position: (92.00, 20.00, 8.02)
22:00:50.865 : echo: <<< probe_pt
22:00:50.869 : echo: z_before = (between) 13.02
22:00:50.873 : echo: probe_pt >>>
22:00:50.877 : echo: > ProbeAction:0 > current_position: (92.00, 20.00, 8.02)
22:00:50.881 : echo: Z Raise to z_before 13.02 > do_blocking_move_to_z 13.02
22:00:50.885 : echo: do_blocking_move_to: (92.00, 20.00, 13.02)
22:00:51.836 : echo: > do_blocking_move_to_xy 56.00, 20.00
22:00:51.840 : echo: do_blocking_move_to: (56.00, 20.00, 13.02)
22:00:51.896 : N285 M105 *8
22:00:54.310 : echo: run_z_probe > current_position: (56.00, 20.00, 8.09)
22:00:54.310 : echo: <<< probe_pt
22:00:54.314 : echo: z_before = (between) 13.09
22:00:54.314 : echo: probe_pt >>>
22:00:54.318 : echo: > ProbeAction:0 > current_position: (56.00, 20.00, 8.09)
22:00:54.326 : echo: Z Raise to z_before 13.09 > do_blocking_move_to_z 13.09
22:00:54.330 : echo: do_blocking_move_to: (56.00, 20.00, 13.09)
22:00:55.280 : echo: > do_blocking_move_to_xy 20.00, 20.00
22:00:55.285 : echo: do_blocking_move_to: (20.00, 20.00, 13.09)
22:00:57.914 : echo: run_z_probe > current_position: (20.00, 20.00, 7.15)
22:00:57.914 : echo: <<< probe_pt
22:00:57.918 : echo: z_before = (between) 12.15
22:00:57.918 : echo: probe_pt >>>
22:00:57.926 : echo: > ProbeAction:0 > current_position: (20.00, 20.00, 7.15)
22:00:57.930 : echo: Z Raise to z_before 12.15 > do_blocking_move_to_z 12.15
22:00:57.934 : echo: do_blocking_move_to: (20.00, 20.00, 12.15)
22:00:58.913 : echo: > do_blocking_move_to_xy 20.00, 56.00
22:00:58.917 : echo: do_blocking_move_to: (20.00, 56.00, 12.15)
22:01:01.284 : echo: run_z_probe > current_position: (20.00, 56.00, 7.80)
22:01:01.284 : echo: <<< probe_pt
22:01:01.288 : echo: z_before = (between) 12.80
22:01:01.288 : echo: probe_pt >>>
22:01:01.297 : echo: > ProbeAction:0 > current_position: (20.00, 56.00, 7.80)
22:01:01.301 : echo: Z Raise to z_before 12.80 > do_blocking_move_to_z 12.80
22:01:01.305 : echo: do_blocking_move_to: (20.00, 56.00, 12.80)
22:01:01.954 : N286 M105 *11
22:01:02.255 : echo: > do_blocking_move_to_xy 56.00, 56.00
22:01:02.260 : echo: do_blocking_move_to: (56.00, 56.00, 12.80)
22:01:04.683 : echo: run_z_probe > current_position: (56.00, 56.00, 8.13)
22:01:04.683 : echo: <<< probe_pt
22:01:04.687 : echo: z_before = (between) 13.13
22:01:04.687 : echo: probe_pt >>>
22:01:04.696 : echo: > ProbeAction:0 > current_position: (56.00, 56.00, 8.13)
22:01:04.701 : echo: Z Raise to z_before 13.13 > do_blocking_move_to_z 13.13
22:01:04.705 : echo: do_blocking_move_to: (56.00, 56.00, 13.13)
22:01:05.654 : echo: > do_blocking_move_to_xy 92.00, 56.00
22:01:05.658 : echo: do_blocking_move_to: (92.00, 56.00, 13.13)
22:01:08.161 : echo: run_z_probe > current_position: (92.00, 56.00, 8.01)
22:01:08.161 : echo: <<< probe_pt
22:01:08.165 : echo: z_before = (between) 13.01
22:01:08.165 : echo: probe_pt >>>
22:01:08.173 : echo: > ProbeAction:0 > current_position: (92.00, 56.00, 8.01)
22:01:08.177 : echo: Z Raise to z_before 13.01 > do_blocking_move_to_z 13.01
22:01:08.181 : echo: do_blocking_move_to: (92.00, 56.00, 13.01)
22:01:09.132 : echo: > do_blocking_move_to_xy 128.00, 56.00
22:01:09.140 : echo: do_blocking_move_to: (128.00, 56.00, 13.01)
22:01:11.605 : echo: run_z_probe > current_position: (128.00, 56.00, 8.01)
22:01:11.605 : echo: <<< probe_pt
22:01:11.609 : echo: z_before = (between) 13.01
22:01:11.609 : echo: probe_pt >>>
22:01:11.614 : echo: > ProbeAction:0 > current_position: (128.00, 56.00, 8.01)
22:01:11.622 : echo: Z Raise to z_before 13.01 > do_blocking_move_to_z 13.01
22:01:11.626 : echo: do_blocking_move_to: (128.00, 56.00, 13.01)
22:01:12.015 : N287 M105 *10
22:01:12.576 : echo: > do_blocking_move_to_xy 128.00, 92.00
22:01:12.580 : echo: do_blocking_move_to: (128.00, 92.00, 13.01)
22:01:15.103 : echo: run_z_probe > current_position: (128.00, 92.00, 7.86)
22:01:15.107 : echo: <<< probe_pt
22:01:15.108 : echo: z_before = (between) 12.86
22:01:15.112 : echo: probe_pt >>>
22:01:15.116 : echo: > ProbeAction:0 > current_position: (128.00, 92.00, 7.86)
22:01:15.124 : echo: Z Raise to z_before 12.86 > do_blocking_move_to_z 12.86
22:01:15.127 : echo: do_blocking_move_to: (128.00, 92.00, 12.86)
22:01:16.074 : echo: > do_blocking_move_to_xy 92.00, 92.00
22:01:16.078 : echo: do_blocking_move_to: (92.00, 92.00, 12.86)
22:01:18.593 : echo: run_z_probe > current_position: (92.00, 92.00, 7.74)
22:01:18.593 : echo: <<< probe_pt
22:01:18.597 : echo: z_before = (between) 12.74
22:01:18.597 : echo: probe_pt >>>
22:01:18.601 : echo: > ProbeAction:0 > current_position: (92.00, 92.00, 7.74)
22:01:18.609 : echo: Z Raise to z_before 12.74 > do_blocking_move_to_z 12.74
22:01:18.613 : echo: do_blocking_move_to: (92.00, 92.00, 12.74)
22:01:19.563 : echo: > do_blocking_move_to_xy 56.00, 92.00
22:01:19.567 : echo: do_blocking_move_to: (56.00, 92.00, 12.74)
22:01:22.025 : echo: run_z_probe > current_position: (56.00, 92.00, 7.86)
22:01:22.029 : echo: <<< probe_pt
22:01:22.029 : echo: z_before = (between) 12.86
22:01:22.033 : echo: probe_pt >>>
22:01:22.037 : echo: > ProbeAction:0 > current_position: (56.00, 92.00, 7.86)
22:01:22.041 : echo: Z Raise to z_before 12.86 > do_blocking_move_to_z 12.86
22:01:22.045 : echo: do_blocking_move_to: (56.00, 92.00, 12.86)
22:01:22.083 : N288 M105 *5
22:01:23.000 : echo: > do_blocking_move_to_xy 20.00, 92.00
22:01:23.004 : echo: do_blocking_move_to: (20.00, 92.00, 12.86)
22:01:25.527 : echo: run_z_probe > current_position: (20.00, 92.00, 7.60)
22:01:25.530 : echo: <<< probe_pt
22:01:25.530 : echo: z_before = (between) 12.60
22:01:25.534 : echo: probe_pt >>>
22:01:25.539 : echo: > ProbeAction:0 > current_position: (20.00, 92.00, 7.60)
22:01:25.547 : echo: Z Raise to z_before 12.60 > do_blocking_move_to_z 12.60
22:01:25.550 : echo: do_blocking_move_to: (20.00, 92.00, 12.60)
22:01:26.501 : echo: > do_blocking_move_to_xy 20.00, 128.00
22:01:26.505 : echo: do_blocking_move_to: (20.00, 128.00, 12.60)
22:01:28.974 : echo: run_z_probe > current_position: (20.00, 128.00, 7.69)
22:01:28.978 : echo: <<< probe_pt
22:01:28.983 : echo: z_before = (between) 12.69
22:01:28.983 : echo: probe_pt >>>
22:01:28.987 : echo: > ProbeAction:0 > current_position: (20.00, 128.00, 7.69)
22:01:28.995 : echo: Z Raise to z_before 12.69 > do_blocking_move_to_z 12.69
22:01:28.999 : echo: do_blocking_move_to: (20.00, 128.00, 12.69)
22:01:29.974 : echo: > do_blocking_move_to_xy 56.00, 128.00
22:01:29.978 : echo: do_blocking_move_to: (56.00, 128.00, 12.69)
22:01:32.143 : N289 M105 *4
22:01:32.440 : echo: run_z_probe > current_position: (56.00, 128.00, 7.77)
22:01:32.440 : echo: <<< probe_pt
22:01:32.444 : echo: z_before = (between) 12.77
22:01:32.444 : echo: probe_pt >>>
22:01:32.452 : echo: > ProbeAction:0 > current_position: (56.00, 128.00, 7.77)
22:01:32.456 : echo: Z Raise to z_before 12.77 > do_blocking_move_to_z 12.77
22:01:32.460 : echo: do_blocking_move_to: (56.00, 128.00, 12.77)
22:01:33.414 : echo: > do_blocking_move_to_xy 92.00, 128.00
22:01:33.418 : echo: do_blocking_move_to: (92.00, 128.00, 12.77)
22:01:35.884 : echo: run_z_probe > current_position: (92.00, 128.00, 7.81)
22:01:35.888 : echo: <<< probe_pt
22:01:35.888 : echo: z_before = (between) 12.81
22:01:35.892 : echo: probe_pt >>>
22:01:35.896 : echo: > ProbeAction:2 > current_position: (92.00, 128.00, 7.81)
22:01:35.900 : echo: Z Raise to z_before 12.81 > do_blocking_move_to_z 12.81
22:01:35.904 : echo: do_blocking_move_to: (92.00, 128.00, 12.81)
22:01:36.859 : echo: > do_blocking_move_to_xy 128.00, 128.00
22:01:36.863 : echo: do_blocking_move_to: (128.00, 128.00, 12.81)
22:01:39.329 : echo: run_z_probe > current_position: (128.00, 128.00, 7.79)
22:01:39.333 : echo: > ProbeStow (stow_z_probe will do Z Raise)
22:01:39.337 : echo: stow_z_probe > current_position: (128.00, 128.00, 7.79)
22:01:39.341 : echo: <<< probe_pt
22:01:39.345 : echo: > probing complete > current_position: (128.00, 128.00, 7.79)
22:01:39.349 : echo: setup_for_endstop_move > enable_endstops(false)
22:01:39.369 : echo: Eqn coefficients: a: 0.00300476 b: -0.00131250 d: 7.71528005
22:01:39.373 : echo: planeNormal x: -0.003005 y: 0.001312 z: 1.000000
22:01:39.381 : echo: set_bed_level_equation_lsq > current_position: (128.02, 127.99, 7.57)
22:01:39.389 : echo: Bed Level Correction Matrix:
22:01:39.393 : echo: +0.999995 +0.000000 +0.003005
22:01:39.394 : echo: +0.000004 +0.999999 -0.001312
22:01:39.398 : echo: -0.003005 +0.001312 +0.999995
22:01:39.406 : echo: > AFTER apply_rotation_xyz > current_position[Z_AXIS]= 7.58285
22:01:39.406 : echo: <<< gcode_G29
|
Re: PiBot Optical Reflection Endstop October 28, 2015 06:43PM |
Registered: 9 years ago Posts: 860 |
Questo anche è simpatico e credo che la stasca per chiudere i led sia utile riesci a modificarlo realizando una L come quello da me allegato ovvero da 35mm e un foro a 15mm dalla fine ?Quote
almada
se è per questo ne esiste anche un altro nell'universo delle cose, a mio avviso migliore visto che include una copertura per i sensori
Grazie
www.saviot.com Stampante Prusa I3 R2.2 By Nicola P.
Ramps 1.4 Con FW MarlinKimba Fusore HE IeC 1.75mm Con Flusso Canalizzatore Estrusori BullDog XL
Piano maggiorato 240*311mm pilotato da SSR 24V con letto scaldante autocostruito
Lavori in Corso Prossimetro Autolivellamento Z Gestione Remota Raspberry PI 2 con OctoPrint
Rilevamento ottico Fine Filo Illuminazione e Visione AreaStampa Remotata In costruzione Trafilatore TL-Plastic
|
Re: PiBot Optical Reflection Endstop October 28, 2015 07:49PM |
Registered: 8 years ago Posts: 167 |
|
Re: PiBot Optical Reflection Endstop October 28, 2015 07:51PM |
Registered: 8 years ago Posts: 33 |
Quote
saviothecnic
Questo anche è simpatico e credo che la stasca per chiudere i led sia utile riesci a modificarlo realizando una L come quello da me allegato ovvero da 35mm e un foro a 15mm dalla fine ?Quote
almada
se è per questo ne esiste anche un altro nell'universo delle cose, a mio avviso migliore visto che include una copertura per i sensori
Grazie
Non ti arrabbiare, non sono qui a criticare nessuno, ma sul tuo modello c'era poco da lavorare, sono presenti errori (il foro ad esempio) e non sei stato molto chiaro nel descrivermi la L, quindi mi sono permesso di rifare il disegno sulla falsa riga del tuo quotandolo con netfab e non so se le quote sono esatte (PS come diavolo hai fatto a stampare quel modello, il foro, ad esempio, ti è venuto?)
il foro nel mio disegno dista dalla fine 4mm.. come dalle quote del tuo modello...


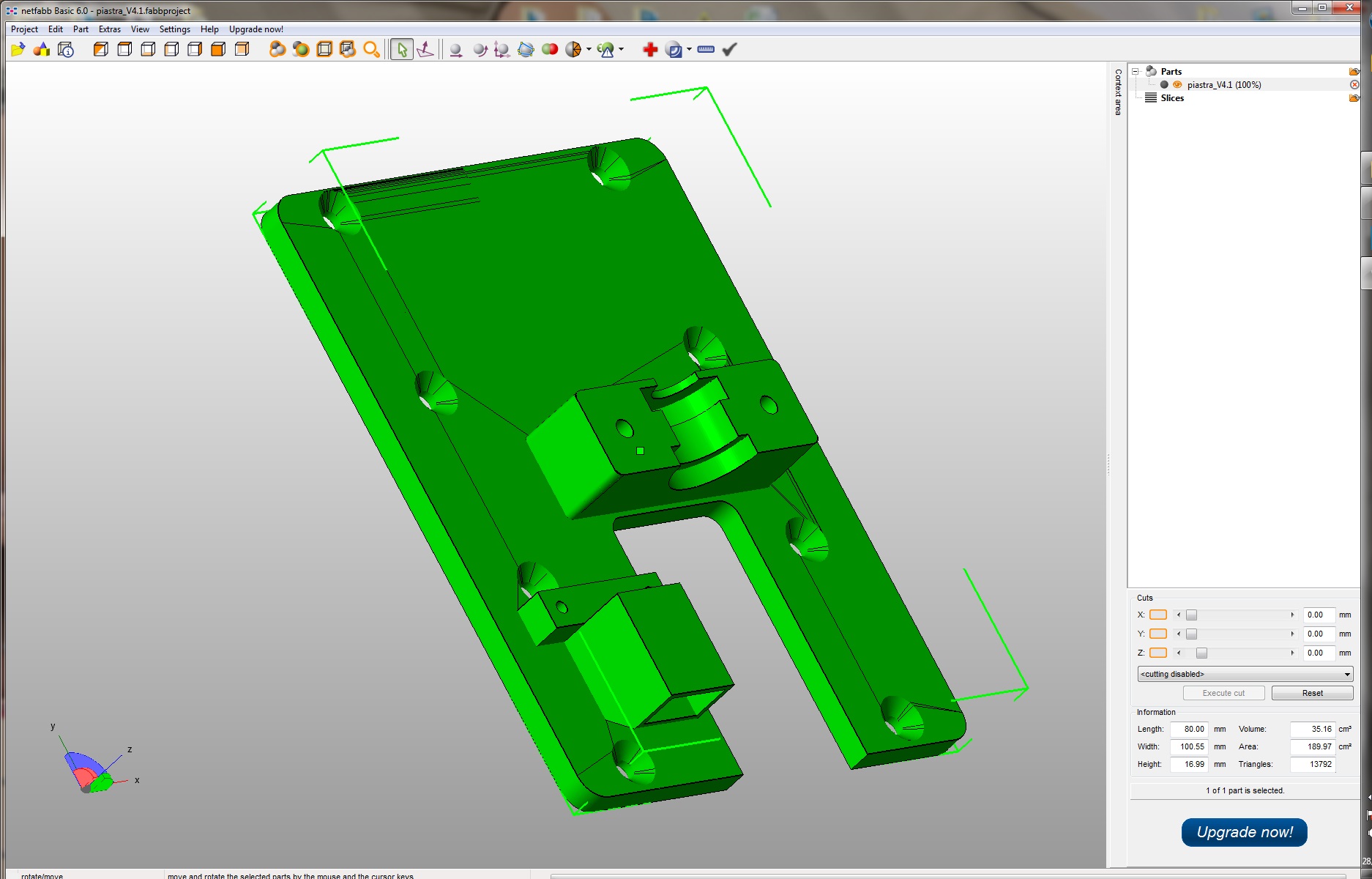{kind=link}
{kind=link}
Sorry, only registered users may post in this forum.