Home
>
RepRap User Groups
>
Europe
>
Italy RepRap User Group - Gruppo RepRap Italia
>
GCODE, Software e Firmware
>
Topic
Lo strano caso di X + 10= 3 mm e X -10 = 10mm..
Posted by mark2.cnc
|
Lo strano caso di X + 10= 3 mm e X -10 = 10mm.. September 10, 2015 12:43PM |
Registered: 9 years ago Posts: 92 |
Salve amici!
Ho appena assemblato un piccola Delta (o forse sarebbe più corretto dire un delta robot..) semplice semplice
ispirata ad un progetto trovato in rete chiamato TwinTeeth.
Arduino mega e ramps 1.4 (classico) niente Lcd e nessun extruder per ora.
Voglio solo vedere il movimento..
Prendo tutte le misure e compilo diligentemente tutto sul sito [marlinkimbra.it].
Carico il firmware e provo con repetier ad eseguire una semplice z da 10 (bottone) e si muove di circa 3 mm ma se premo il bottone opposto si abbassa di 10!
Strano vero?
Grazie a chi mi aiuterà!
Ho appena assemblato un piccola Delta (o forse sarebbe più corretto dire un delta robot..) semplice semplice
ispirata ad un progetto trovato in rete chiamato TwinTeeth.
Arduino mega e ramps 1.4 (classico) niente Lcd e nessun extruder per ora.
Voglio solo vedere il movimento..
Prendo tutte le misure e compilo diligentemente tutto sul sito [marlinkimbra.it].
Carico il firmware e provo con repetier ad eseguire una semplice z da 10 (bottone) e si muove di circa 3 mm ma se premo il bottone opposto si abbassa di 10!
Strano vero?
Grazie a chi mi aiuterà!
|
Re: Lo strano caso di X + 10= 3 mm e X -10 = 10mm.. September 10, 2015 01:48PM |
Registered: 9 years ago Posts: 690 |
Ciao Mark,
non penso di poterti aiutare ma potresti allegare il firmware per facilitare le cose.
Potresti anche allegare una foto della delta, giusto per curiosità...comunque i delta robot dovrebbe essere altri ancora in teoria...
Delta Fluo --> Stampante Custom tipo Delta - IeC v4.0 0.4 - Ultratronics - MK4due 4.3.1 (dev)
non penso di poterti aiutare ma potresti allegare il firmware per facilitare le cose.
Potresti anche allegare una foto della delta, giusto per curiosità...comunque i delta robot dovrebbe essere altri ancora in teoria...
Delta Fluo --> Stampante Custom tipo Delta - IeC v4.0 0.4 - Ultratronics - MK4due 4.3.1 (dev)
|
Re: Lo strano caso di X + 10= 3 mm e X -10 = 10mm.. September 10, 2015 02:29PM |
Registered: 9 years ago Posts: 92 |
|
Re: Lo strano caso di X + 10= 3 mm e X -10 = 10mm.. September 10, 2015 02:30PM |
Registered: 9 years ago Posts: 92 |
configuration:
#ifndef CONFIGURATION_H #define CONFIGURATION_H // This configuration file contains basic settings. Select your: // - board type // - Mechanism type (cartesian-corexy-delta-scara) // - temperature sensor type // // Mechanisms-settings can be found in configuration_xxxxxx.h // Advanced settings can be found in Configuration_adv.h #include "boards.h" // Choose your board type. // Either an numeric ID or name defined in boards.h is valid. // See: [github.com] #define MOTHERBOARD BOARD_RAMPS_13_HFB // User-specified version info of this build to display in [Pronterface, etc] terminal window during // startup. Implementation of an idea by Prof Braino to inform user that any changes made to this // build by the user have been successfully uploaded into firmware. #define STRING_VERSION "4.1.2" #define STRING_URL "reprap.org" #define STRING_VERSION_CONFIG_H __DATE__ " " __TIME__ // build date and time #define STRING_CONFIG_H_AUTHOR "(none, default config)" // Who made the changes. #define STRING_SPLASH_LINE1 "v" STRING_VERSION // will be shown during bootup in line 1 #define STRING_SPLASH_LINE2 STRING_VERSION_CONFIG_H // will be shown during bootup in line 2 // SERIAL_PORT 0 // This allows the connection of wireless adapters (for instance) to non-default port pins. // Serial port 0 is still used by the Arduino bootloader regardless of this setting. #define SERIAL_PORT 0 // This determines the communication speed of the printer // 115200 - 250000 #define BAUDRATE 115200 // This enables the serial port associated to the Bluetooth interface on AT90USB devices //#define BTENABLED // Define this to set a unique identifier for this printer, (Used by some programs to differentiate between machines) // You can use an online service to generate a random UUID. (eg [www.uuidgenerator.net]) //#define MACHINE_UUID "00000000-0000-0000-0000-000000000000" // If you want test the firmware uncomment below. Use Serial arduino monitor... //#define FIRMWARE_TEST // ONLY BAUDRATE 115200 /***********************************************************************\ **************************** Define type printer ********************** ***********************************************************************/ //#define CARTESIAN //#define COREXY #define DELTA //#define SCARA /***********************************************************************\ /***********************************************************************\ ********************** Do not touch this section ********************** ***********************************************************************/ #if defined(CARTESIAN) #include "Configuration_Cartesian.h" #elif defined(COREXY) #include "Configuration_Core.h" #elif defined(DELTA) #include "Configuration_Delta.h" #elif defined(SCARA) #include "Configuration_Scara.h" #endif /***********************************************************************/ // This defines the number of extruder real or virtual #define EXTRUDERS 1 // This defines the number of Driver extruder you have and use #define DRIVER_EXTRUDERS 1 // This is used for single nozzle and multiple extrusion configuration // Uncomment below to enable (One Hotend) //#define SINGLENOZZLE /*********************************************************************** *********************** Multiextruder MKR4 *************************** *********************************************************************** * * * Setting for more extruder width relay system * * See pins.h for pin command relay * * * ***********************************************************************/ //#define MKR4 //********************************************************************** /*********************************************************************** *********************** Multiextruder NPr2 *************************** *********************************************************************** * * * Setting fot color meccanism NPr2 by NicolaP (www.3dmakerlab.it) * * Find angle setting by g-Code "M997 Cxxx" * * * ***********************************************************************/ //#define NPR2 #define COLOR_STEP {120,25,-65,-155} // CARTER ANGLE #define COLOR_SLOWRATE 170 // MICROSECOND delay for carter motor routine (Carter Motor Feedrate: upper value-slow feedrate) #define COLOR_HOMERATE 4 // FEEDRATE for carter home #define MOTOR_ANGLE 1.8 // Nema angle for single step #define DRIVER_MICROSTEP 4 // Microstep moltiplicator driver (set jumper MS1-2-3) off-on-off 1/4 microstepping. #define CARTER_MOLTIPLICATOR 14.22 // CARTER MOLTIPLICATOR (gear ratio 13/31-10/31) //********************************************************************** // The following define selects which power supply you have. Please choose the one that matches your setup // 0 = Normal power // 1 = ATX // 2 = X-Box 360 203 Watts (the blue wire connected to PS_ON and the red wire to VCC) #define POWER_SUPPLY 0 // Define this to have the electronics keep the power supply off on startup. If you don't know what this is leave it. //#define PS_DEFAULT_OFF //=========================================================================== //============================= Thermal Settings ============================ //=========================================================================== //================================ Thermistor =============================== //--NORMAL IS 4.7kohm PULLUP!-- 1kohm pullup can be used on hotend sensor, using correct resistor and table // //// Temperature sensor settings: // -2 is thermocouple with MAX6675 (only for sensor 0) // -1 is thermocouple with AD595 // 0 is not used // 1 is 100k thermistor - best choice for EPCOS 100k (4.7k pullup) // 2 is 200k thermistor - ATC Semitec 204GT-2 (4.7k pullup) // 3 is Mendel-parts thermistor (4.7k pullup) // 4 is 10k thermistor !! do not use it for a hotend. It gives bad resolution at high temp. !! // 5 is 100K thermistor - ATC Semitec 104GT-2 (Used in ParCan & J-Head) (4.7k pullup) // 6 is 100k EPCOS - Not as accurate as table 1 (created using a fluke thermocouple) (4.7k pullup) // 7 is 100k Honeywell thermistor 135-104LAG-J01 (4.7k pullup) // 71 is 100k Honeywell thermistor 135-104LAF-J01 (4.7k pullup) // 8 is 100k 0603 SMD Vishay NTCS0603E3104FXT (4.7k pullup) // 9 is 100k GE Sensing AL03006-58.2K-97-G1 (4.7k pullup) // 10 is 100k RS thermistor 198-961 (4.7k pullup) // 11 is 100k beta 3950 1% thermistor (4.7k pullup) // 12 is 100k 0603 SMD Vishay NTCS0603E3104FXT (4.7k pullup) (calibrated for Makibox hot bed) // 13 is 100k Hisens 3950 1% up to 300°C for hotend "Simple ONE " & "Hotend "All In ONE" // 20 is the PT100 circuit found in the Ultimainboard V2.x // 60 is 100k Maker's Tool Works Kapton Bed Thermistor beta=3950 // // 1k ohm pullup tables - This is not normal, you would have to have changed out your 4.7k for 1k // (but gives greater accuracy and more stable PID) // 51 is 100k thermistor - EPCOS (1k pullup) // 52 is 200k thermistor - ATC Semitec 204GT-2 (1k pullup) // 55 is 100k thermistor - ATC Semitec 104GT-2 (Used in ParCan & J-Head) (1k pullup) // // 1047 is Pt1000 with 4k7 pullup // 1010 is Pt1000 with 1k pullup (non standard) // 147 is Pt100 with 4k7 pullup // 110 is Pt100 with 1k pullup (non standard) // 998 and 999 are Dummy Tables. They will ALWAYS read 25°C or the temperature defined below. // Use it for Testing or Development purposes. NEVER for production machine. // #define DUMMY_THERMISTOR_998_VALUE 25 // #define DUMMY_THERMISTOR_999_VALUE 100 #define TEMP_SENSOR_0 0 #define TEMP_SENSOR_1 0 #define TEMP_SENSOR_2 0 #define TEMP_SENSOR_3 0 #define TEMP_SENSOR_BED 1 // This makes temp sensor 1 a redundant sensor for sensor 0. If the temperatures difference between these sensors is to high the print will be aborted. //#define TEMP_SENSOR_1_AS_REDUNDANT #define MAX_REDUNDANT_TEMP_SENSOR_DIFF 10 // (degC) // Actual temperature must be close to target for this long before M109 returns success #define TEMP_RESIDENCY_TIME 10 // (seconds) #define TEMP_HYSTERESIS 3 // (degC) range of +/- temperatures considered "close" to the target one #define TEMP_WINDOW 1 // (degC) Window around target to start the residency timer x degC early. // The minimal temperature defines the temperature below which the heater will not be enabled It is used // to check that the wiring to the thermistor is not broken. // Otherwise this would lead to the heater being powered on all the time. #define HEATER_0_MINTEMP 5 // (degC) #define HEATER_1_MINTEMP 5 // (degC) #define HEATER_2_MINTEMP 5 // (degC) #define HEATER_3_MINTEMP 5 // (degC) #define BED_MINTEMP 5 // (degC) // When temperature exceeds max temp, your heater will be switched off. // This feature exists to protect your hotend from overheating accidentally, but *NOT* from thermistor short/failure! // You should use MINTEMP for thermistor short/failure protection. #define HEATER_0_MAXTEMP 275 // (degC) #define HEATER_1_MAXTEMP 275 // (degC) #define HEATER_2_MAXTEMP 275 // (degC) #define HEATER_3_MAXTEMP 275 // (degC) #define BED_MAXTEMP 150 // (degC) // If your bed has low resistance e.g. .6 ohm and throws the fuse you can duty cycle it to reduce the // average current. The value should be an integer and the heat bed will be turned on for 1 interval of // HEATER_BED_DUTY_CYCLE_DIVIDER intervals. //#define HEATER_BED_DUTY_CYCLE_DIVIDER 4 // If you want the M105 heater power reported in watts, define the BED_WATTS, and (shared for all hotend) HOTEND_WATTS //#define HOTEND_WATTS (12.0*12.0/6.7) // P=I^2/R //#define BED_WATTS (12.0*12.0/1.1) // P=I^2/R //=========================================================================== //============================= PID Settings ================================ //=========================================================================== // PID Tuning Guide here: [reprap.org] // Comment the following line to disable PID and enable bang-bang. #define PIDTEMP #define BANG_MAX 255 // limits current to nozzle while in bang-bang mode; 255=full current #define PID_MAX BANG_MAX // limits current to nozzle while PID is active (see PID_FUNCTIONAL_RANGE below); 255=full current //#define PID_DEBUG // Sends debug data to the serial port. //#define PID_OPENLOOP 1 // Puts PID in open loop. M104/M140 sets the output power from 0 to PID_MAX //#define SLOW_PWM_HEATERS // PWM with very low frequency (roughly 0.125Hz=8s) and minimum state time of approximately 1s useful for heaters driven by a relay // If the temperature difference between the target temperature and the actual temperature // is more then PID_FUNCTIONAL_RANGE then the PID will be shut off and the heater will be set to min/max. #define PID_FUNCTIONAL_RANGE 10 // degC #define PID_INTEGRAL_DRIVE_MAX PID_MAX // Limit for the integral term #define K1 0.95 // Smoothing factor within the PID // HotEnd{HE0,HE1,HE2,HE3} #define DEFAULT_Kp {41.51,41.51,41.51,41.51} // Kp for E0, E1, E2, E3 #define DEFAULT_Ki {7.28,7.28,7.28,7.28} // Ki for E0, E1, E2, E3 #define DEFAULT_Kd {59.17,59.17,59.17,59.17} // Kd for E0, E1, E2, E3 //=========================================================================== //=========================================================================== //============================= PID > Bed Temperature Control =============== //=========================================================================== // Select PID or bang-bang with PIDTEMPBED. If bang-bang, BED_LIMIT_SWITCHING will enable hysteresis // // Uncomment this to enable PID on the bed. It uses the same frequency PWM as the extruder. // If your PID_dT is the default, and correct for your hardware/configuration, that means 7.689Hz, // which is fine for driving a square wave into a resistive load and does not significantly impact you FET heating. // This also works fine on a Fotek SSR-10DA Solid State Relay into a 250W heater. // If your configuration is significantly different than this and you don't understand the issues involved, you probably // shouldn't use bed PID until someone else verifies your hardware works. // If this is enabled, find your own PID constants below. //#define PIDTEMPBED // //#define BED_LIMIT_SWITCHING // This sets the max power delivered to the bed, and replaces the HEATER_BED_DUTY_CYCLE_DIVIDER option. // all forms of bed control obey this (PID, bang-bang, bang-bang with hysteresis) // setting this to anything other than 255 enables a form of PWM to the bed just like HEATER_BED_DUTY_CYCLE_DIVIDER did, // so you shouldn't use it unless you are OK with PWM on your bed. (see the comment on enabling PIDTEMPBED) #define MAX_BED_POWER 255 // limits duty cycle to bed; 255=full current //#define PID_BED_DEBUG // Sends debug data to the serial port. //120v 250W silicone heater into 4mm borosilicate (MendelMax 1.5+) //from FOPDT model - kp=.39 Tp=405 Tdead=66, Tc set to 79.2, aggressive factor of .15 (vs .1, 1, 10) #define DEFAULT_bedKp 10.00 #define DEFAULT_bedKi .023 #define DEFAULT_bedKd 305.4 //120v 250W silicone heater into 4mm borosilicate (MendelMax 1.5+) //from pidautotune // #define DEFAULT_bedKp 97.1 // #define DEFAULT_bedKi 1.41 // #define DEFAULT_bedKd 1675.16 // FIND YOUR OWN: "M303 E-1 C8 S90" to run autotune on the bed at 90 degreesC for 8 cycles. //=========================================================================== //this prevents dangerous Extruder moves, i.e. if the temperature is under the limit //can be software-disabled for whatever purposes by #define PREVENT_DANGEROUS_EXTRUDE //if PREVENT DANGEROUS EXTRUDE is on, you can still disable (uncomment) very long bits of extrusion separately. #define PREVENT_LENGTHY_EXTRUDE #define EXTRUDE_MINTEMP 170 // degC #define EXTRUDE_MAXLENGTH (X_MAX_LENGTH+Y_MAX_LENGTH) //prevent extrusion of very large distances. //=========================================================================== //======================== Thermal Runaway Protection ======================= //=========================================================================== /** * Thermal Runaway Protection protects your printer from damage and fire if a * thermistor falls out or temperature sensors fail in any way. * * The issue: If a thermistor falls out or a temperature sensor fails, * Marlin can no longer sense the actual temperature. Since a disconnected * thermistor reads as a low temperature, the firmware will keep the heater on. * * The solution: Once the temperature reaches the target, start observing. * If the temperature stays too far below the target (hysteresis) for too long, * the firmware will halt as a safety precaution. * * Note that because the countdown starts only AFTER the temperature reaches * the target, this will not catch a thermistor that is already disconnected * when the print starts! * * To enable for all extruder heaters, uncomment the two defines below: */ // Parameters for all extruder heaters #define THERMAL_RUNAWAY_PROTECTION_PERIOD 40 // in seconds #define THERMAL_RUNAWAY_PROTECTION_HYSTERESIS 4 // in degree Celsius // To enable for the bed heater, uncomment the two defines below: // Parameters for the bed heater #define THERMAL_RUNAWAY_PROTECTION_BED_PERIOD 20 // in seconds #define THERMAL_RUNAWAY_PROTECTION_BED_HYSTERESIS 2 // in degree Celsius //=========================================================================== //============================ User Interfaces ============================== //=========================================================================== //==============================LCD and SD support============================= // Choose ONE of these 3 charsets. This has to match your hardware. Ignored for full graphic display. // To find out what type you have - compile with (test) - upload - click to get the menu. You'll see two typical lines from the upper half of the charset. // See also documentation/LCDLanguageFont.md #define DISPLAY_CHARSET_HD44780_JAPAN // this is the most common hardware //#define DISPLAY_CHARSET_HD44780_WESTERN //#define DISPLAY_CHARSET_HD44780_CYRILLIC //#define ULTRA_LCD //general LCD support, also 16x2 //#define DOGLCD // Support for SPI LCD 128x64 (Controller ST7565R graphic Display Family) //#define SDSUPPORT // Enable SD Card Support in Hardware Console //#define SDSLOW // Use slower SD transfer mode (not normally needed - uncomment if you're getting volume init error) //#define SD_CHECK_AND_RETRY // Use CRC checks and retries on the SD communication //#define ENCODER_PULSES_PER_STEP 1 // Increase if you have a high resolution encoder //#define ENCODER_STEPS_PER_MENU_ITEM 5 // Set according to ENCODER_PULSES_PER_STEP or your liking //#define ULTIMAKERCONTROLLER //as available from the Ultimaker online store. //#define ULTIPANEL //the UltiPanel as on Thingiverse //#define LCD_FEEDBACK_FREQUENCY_DURATION_MS 100 // the duration the buzzer plays the UI feedback sound. ie Screen Click //#define LCD_FEEDBACK_FREQUENCY_HZ 1000 // this is the tone frequency the buzzer plays when on UI feedback. ie Screen Click // 0 to disable buzzer feedback. Test with M300 S P // PanelOne from T3P3 (via RAMPS 1.4 AUX2/AUX3) // [reprap.org] //#define PANEL_ONE // The MaKr3d Makr-Panel with graphic controller and SD support // [reprap.org] //#define MAKRPANEL // The Panucatt Devices Viki 2.0 and mini Viki with Graphic LCD // [panucatt.com] // ==> REMEMBER TO INSTALL U8glib to your ARDUINO library folder: [code.google.com] //#define VIKI2 //#define miniVIKI // The RepRapDiscount Smart Controller (white PC// [reprap.org] //#define REPRAP_DISCOUNT_SMART_CONTROLLER // The GADGETS3D G3D LCD/SD Controller (blue PC
|
Re: Lo strano caso di X + 10= 3 mm e X -10 = 10mm.. September 10, 2015 02:31PM |
Registered: 9 years ago Posts: 92 |
// Define this to set a custom name for your generic Delta
// Displayed in the LCD "Ready" message
#define CUSTOM_MACHINE_NAME "deltah"
//===========================================================================
//============================== Delta Settings =============================
//===========================================================================
// Make delta curves from many straight lines (linear interpolation).
// This is a trade-off between visible corners (not enough segments)
// and processor overload (too many expensive sqrt calls).
#define DELTA_SEGMENTS_PER_SECOND 200
// Center-to-center distance of the holes in the diagonal push rods.
#define DEFAULT_DELTA_DIAGONAL_ROD 158 // mm
// Horizontal offset from middle of printer to smooth rod center.
#define DELTA_SMOOTH_ROD_OFFSET 125.6 // mm
// Horizontal offset of the universal joints on the end effector.
#define DELTA_EFFECTOR_OFFSET 26.4 // mm
// Horizontal offset of the universal joints on the carriages.
#define DELTA_CARRIAGE_OFFSET 19.2 // mm
// Bed Printer radius
#define PRINTER_RADIUS 75 // mm
//Uncomment to enable autocalibration debug messages
#define DEBUG_MESSAGES
// Precision for G30 delta autocalibration function
#define AUTOCALIBRATION_PRECISION 0.1 // mm
// Effective horizontal distance bridged by diagonal push rods.
#define DEFAULT_DELTA_RADIUS (DELTA_SMOOTH_ROD_OFFSET-DELTA_EFFECTOR_OFFSET-DELTA_CARRIAGE_OFFSET)
// Z-Probe variables
// Start and end location values are used to deploy/retract the probe (will move from start to end and back again)
#define PROBING_FEEDRATE 100 // Speed for individual probe Use: G30 A F600
#define Z_PROBE_OFFSET {0,0,-10} // X, Y, Z, E distance between hotend nozzle and deployed bed leveling probe.
#define Z_PROBE_DEPLOY_START_LOCATION {0,0,30,0} // X, Y, Z, E start location for z-probe deployment sequence
#define Z_PROBE_DEPLOY_END_LOCATION {0,0,0,0} // X, Y, Z, E end location for z-probe deployment sequence
#define Z_PROBE_RETRACT_START_LOCATION {0,0,30,0} // X, Y, Z, E start location for z-probe retract sequence
#define Z_PROBE_RETRACT_END_LOCATION {0,0,0,0} // X, Y, Z, E end location for z-probe retract sequence
#define Z_RAISE_BETWEEN_PROBINGS 2 // How much the extruder will be raised when travelling from between next probing points
#define AUTOLEVEL_GRID 20 // Distance between autolevel Z probing points, should be less than print surface radius/3.
//===========================================================================
//=============================Mechanical Settings===========================
//===========================================================================
// coarse Endstop Settings
//#define ENDSTOPPULLUPS // Comment this out (using // at the start of the line) to disable the endstop pullup resistors
#ifndef ENDSTOPPULLUPS
// fine endstop settings: Individual pullups. will be ignored if ENDSTOPPULLUPS is defined
#define ENDSTOPPULLUP_XMAX
#define ENDSTOPPULLUP_YMAX
#define ENDSTOPPULLUP_ZMAX
#define ENDSTOPPULLUP_XMIN
#define ENDSTOPPULLUP_YMIN
#define ENDSTOPPULLUP_ZMIN
#define ENDSTOPPULLUP_ZPROBE
#define ENDSTOPPULLUP_EMIN
#endif
// Mechanical endstop with COM to ground and NC to Signal uses "false" here (most common setup).
#define X_MIN_ENDSTOP_LOGIC false // set to true to invert the logic of the endstop.
#define Y_MIN_ENDSTOP_LOGIC false // set to true to invert the logic of the endstop.
#define Z_MIN_ENDSTOP_LOGIC false // set to true to invert the logic of the endstop.
#define E_MIN_ENDSTOP_LOGIC false // set to true to invert the logic of the endstop.
#define X_MAX_ENDSTOP_LOGIC false // set to true to invert the logic of the endstop.
#define Y_MAX_ENDSTOP_LOGIC false // set to true to invert the logic of the endstop.
#define Z_MAX_ENDSTOP_LOGIC false // set to true to invert the logic of the endstop.
#define Z_PROBE_ENDSTOP_LOGIC false // set to true to invert the logic of the endstop.
// If you want to enable the Z Probe pin, but disable its use, uncomment the line below.
// Z_PROBE_ENDSTOP must are active if you want Autocalibration
#define Z_PROBE_ENDSTOP
// ENDSTOP SETTINGS:
// Sets direction of endstop when homing; 1=MAX, -1=MIN
#define X_HOME_DIR 1 // MUST HAVE MAX ENDSTOP
#define Y_HOME_DIR 1 // MUST HAVE MAX ENDSTOP
#define Z_HOME_DIR 1 // MUST HAVE MAX ENDSTOP
#define min_software_endstops true // If true, axis won't move to coordinates less than HOME_POS.
#define max_software_endstops true // If true, axis won't move to coordinates greater than the defined lengths below.
// For Inverting Stepper Enable Pins (Active Low) use 0, Non Inverting (Active High) use 1
#define X_ENABLE_ON 0
#define Y_ENABLE_ON 0
#define Z_ENABLE_ON 0
#define E_ENABLE_ON 0 // For all extruder
// Disables axis when it's not being used.
#define DISABLE_X false
#define DISABLE_Y false
#define DISABLE_Z false
#define DISABLE_E false // For all extruder
#define DISABLE_INACTIVE_EXTRUDER false //disable only inactive extruder and keep active extruder enabled
// If you motor turns to wrong direction, you can invert it here:
#define INVERT_X_DIR false
#define INVERT_Y_DIR false
#define INVERT_Z_DIR false
#define INVERT_E0_DIR false
#define INVERT_E1_DIR false
#define INVERT_E2_DIR false
#define INVERT_E3_DIR false
// The position of the homing switches
#define MANUAL_HOME_POSITIONS // If defined, MANUAL_*_HOME_POS below will be used
#define BED_CENTER_AT_0_0 // If defined, the center of the bed is at (X=0, Y=0)
//Manual homing switch locations:
#define MANUAL_X_HOME_POS 0
#define MANUAL_Y_HOME_POS 0
#define MANUAL_Z_HOME_POS 210 // Distance between nozzle and print surface after homing.
// Travel limits after homing (units are in mm)
#define X_MAX_POS PRINTER_RADIUS
#define X_MIN_POS -PRINTER_RADIUS
#define Y_MAX_POS PRINTER_RADIUS
#define Y_MIN_POS -PRINTER_RADIUS
#define Z_MAX_POS MANUAL_Z_HOME_POS
#define Z_MIN_POS 0
#define E_MIN_POS 0
// MOVEMENT SETTINGS
#define HOMING_FEEDRATE {100*60,100*60,100*60,0} // set the homing speeds (mm/min)
// default settings
// delta speeds must be the same on xyz
#define DEFAULT_AXIS_STEPS_PER_UNIT {100,100,100,625,625,625,625} // X, Y, Z, E0, E1, E2, E3
#define DEFAULT_MAX_FEEDRATE {530,530,530,100,100,100,100} // X, Y, Z, E0, E1, E2, E3 (mm/sec)
#define DEFAULT_RETRACTION_MAX_FEEDRATE {150,150,150,150} // E0, E1, E2, E3 (mm/sec)
#define DEFAULT_MAX_ACCELERATION {3000,3000,3000,3000,3000,3000,3000} // X, Y, Z, E0, E1, E2, E3 maximum start speed for accelerated moves.
#define DEFAULT_ACCELERATION 2500 // X, Y, Z and E max acceleration in mm/s^2 for printing moves
#define DEFAULT_RETRACT_ACCELERATION 10000 // X, Y, Z and E max acceleration in mm/s^2 for retracts
#define DEFAULT_TRAVEL_ACCELERATION 3000 // X, Y, Z acceleration in mm/s^2 for travel (non printing) moves
// Offset of the extruders (uncomment if using more than one and relying on firmware to position when changing).
// The offset has to be X=0, Y=0 for the extruder 0 hotend (default extruder).
// For the other hotends it is their distance from the extruder 0 hotend.
//#define HOTEND_OFFSET_X {0.0, 5.00, 0.0, 0.0} // (in mm) for each extruder, offset of the hotend on the X axis
//#define HOTEND_OFFSET_Y {0.0, 5.00, 0.0, 0.0} // (in mm) for each extruder, offset of the hotend on the Y axis
// The speed change that does not require acceleration (i.e. the software might assume it can be done instantaneously)
#define DEFAULT_XYJERK 10 // (mm/sec)
#define DEFAULT_ZJERK 10 // (mm/sec)
#define DEFAULT_EJERK 5 // (mm/sec)
|
Re: Lo strano caso di X + 10= 3 mm e X -10 = 10mm.. September 10, 2015 02:38PM |
Registered: 9 years ago Posts: 92 |

|
Re: Lo strano caso di X + 10= 3 mm e X -10 = 10mm.. September 11, 2015 02:42AM |
Registered: 9 years ago Posts: 92 |

|
Re: Lo strano caso di X + 10= 3 mm e X -10 = 10mm.. September 11, 2015 03:03AM |
Registered: 10 years ago Posts: 6,409 |
La home la fa bene?
Lato fw mi sembra tutto ok... Non vorrei che hai una vref bassa e i motori perdono passi in salita...
COMPRA ITALIANO - sostieni le nostre aziende - sostieni la nostra gente - sostieni il tuo popolo - sosterrai te stesso.
Alberto C. felice possessore di una Kossel K2
My Blog - My Thingiverse
Lato fw mi sembra tutto ok... Non vorrei che hai una vref bassa e i motori perdono passi in salita...
COMPRA ITALIANO - sostieni le nostre aziende - sostieni la nostra gente - sostieni il tuo popolo - sosterrai te stesso.
Alberto C. felice possessore di una Kossel K2
My Blog - My Thingiverse
|
Re: Lo strano caso di X + 10= 3 mm e X -10 = 10mm.. September 11, 2015 03:59AM |
Registered: 9 years ago Posts: 92 |
|
Re: Lo strano caso di X + 10= 3 mm e X -10 = 10mm.. September 11, 2015 04:47AM |
Registered: 9 years ago Posts: 92 |
|
Re: Lo strano caso di X + 10= 3 mm e X -10 = 10mm.. September 11, 2015 04:53AM |
Registered: 9 years ago Posts: 92 |

{kind=link}
{kind=link}
|
Re: Lo strano caso di X + 10= 3 mm e X -10 = 10mm.. September 11, 2015 05:25AM |
Registered: 10 years ago Posts: 6,409 |
Cioè fammi capire??? Che vuol dire fai l'homing e poi dai il comando +10 e comincia a salire, come fa se è già in homing????
COMPRA ITALIANO - sostieni le nostre aziende - sostieni la nostra gente - sostieni il tuo popolo - sosterrai te stesso.
Alberto C. felice possessore di una Kossel K2
My Blog - My Thingiverse
COMPRA ITALIANO - sostieni le nostre aziende - sostieni la nostra gente - sostieni il tuo popolo - sosterrai te stesso.
Alberto C. felice possessore di una Kossel K2
My Blog - My Thingiverse
|
Re: Lo strano caso di X + 10= 3 mm e X -10 = 10mm.. September 11, 2015 06:12AM |
Registered: 9 years ago Posts: 92 |
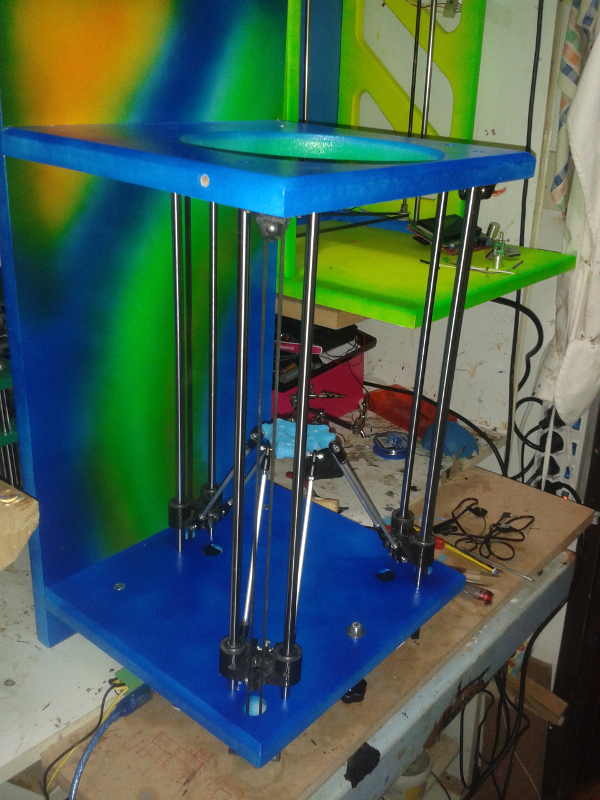
Considera come si vede dalla foto che la macchina è costruita upside down
secondo la filosofia dell' autore di twin-teeth (il bambino può lavare i suoi due incisivi
muovendo lo spazzolino e tenendo la testa ferma oppure tenendo il braccio fermo e
muovendo la testa!).
comunque dopo aver premuto gli switch si ferma
dopo di che qualsiasi bottone prema per l' asse Z (repetier) l' effector "sale" di circa 6/7 centimetri.
poi se avvio sale ancora fino allo 0 (che è in alto x me)..
Edited 1 time(s). Last edit at 09/11/2015 06:45AM by mark2.cnc.
secondo la filosofia dell' autore di twin-teeth (il bambino può lavare i suoi due incisivi
muovendo lo spazzolino e tenendo la testa ferma oppure tenendo il braccio fermo e
muovendo la testa!).
comunque dopo aver premuto gli switch si ferma
dopo di che qualsiasi bottone prema per l' asse Z (repetier) l' effector "sale" di circa 6/7 centimetri.
poi se avvio sale ancora fino allo 0 (che è in alto x me)..
Edited 1 time(s). Last edit at 09/11/2015 06:45AM by mark2.cnc.
|
Re: Lo strano caso di X + 10= 3 mm e X -10 = 10mm.. September 19, 2015 01:19PM |
Registered: 9 years ago Posts: 92 |
Sorry, only registered users may post in this forum.