Home
>
RepRap User Groups
>
Europe
>
Italy RepRap User Group - Gruppo RepRap Italia
>
GCODE, Software e Firmware
>
Topic
MarlinKimbra 4.2 (e precedenti) mi stampa sempre inclinato !
Posted by davdino81
|
MarlinKimbra 4.2 (e precedenti) mi stampa sempre inclinato ! October 15, 2015 01:39PM |
Registered: 8 years ago Posts: 12 |
Ciao a tuti ! ho una stampante 3d cartesiana con firmware MarlinKimbra 4.2.
La stampante funziona perfettamente eccetto il primo Layer, mi spiego meglio:
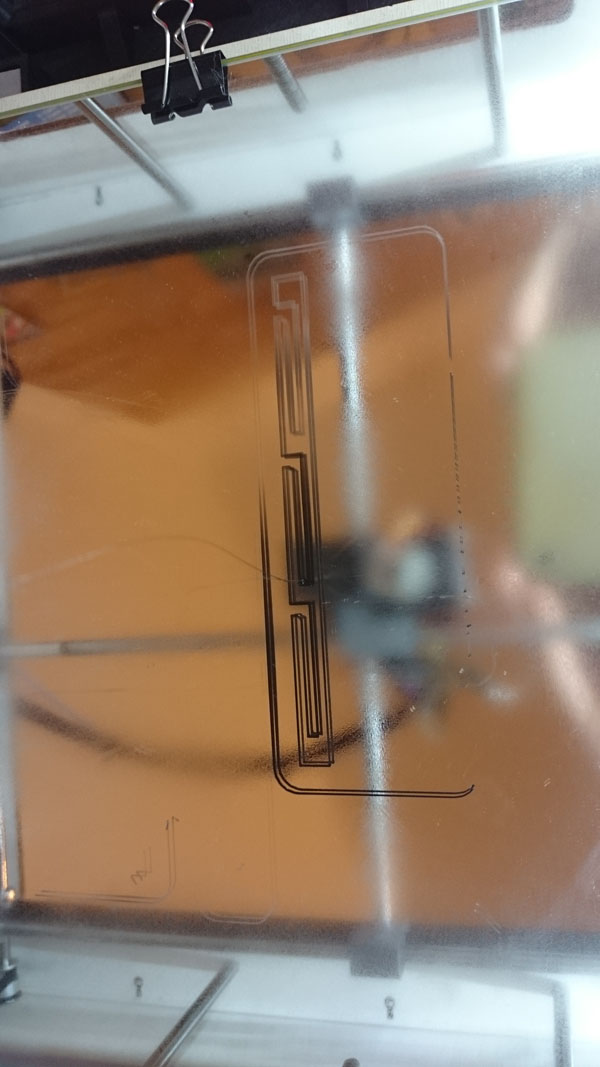
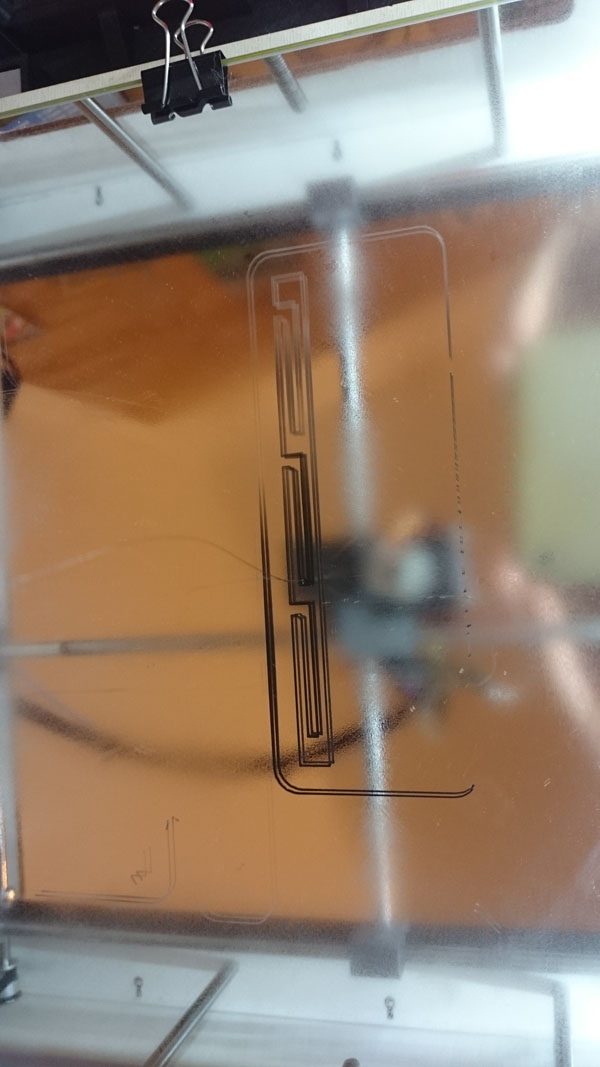
L'auto livellamento funziona e dai dati non sembra che il piatto stampa sia inclinato, quando però stampo il primo livello la metà di destra ha sempre l'ugello molto più vicino di quella di sinistra, più grande è l'oggetto più lo z cambia gradualmente da sinistra a destra (vedi foto allegata).
-Ho provato a girare lo specchio ed il problema persiste, la parte destra è sempre più schiacciata.
-Se non faccio l'auto livellamento il problema non si pone.
-Ho settato più volte lo z-index ma non cambia.
-Il test (g30) dice che il sensore funziona perfettamente.
- ho provato ad scambiare i contatti con i 2 motori dell'asse z ma niente.
-Ho letto le guide ma non ho trovato niente in riferimento.
Questa è la matrice che calcola
Per scrupolo vi mostro il settaggio ma penso sia corretto.
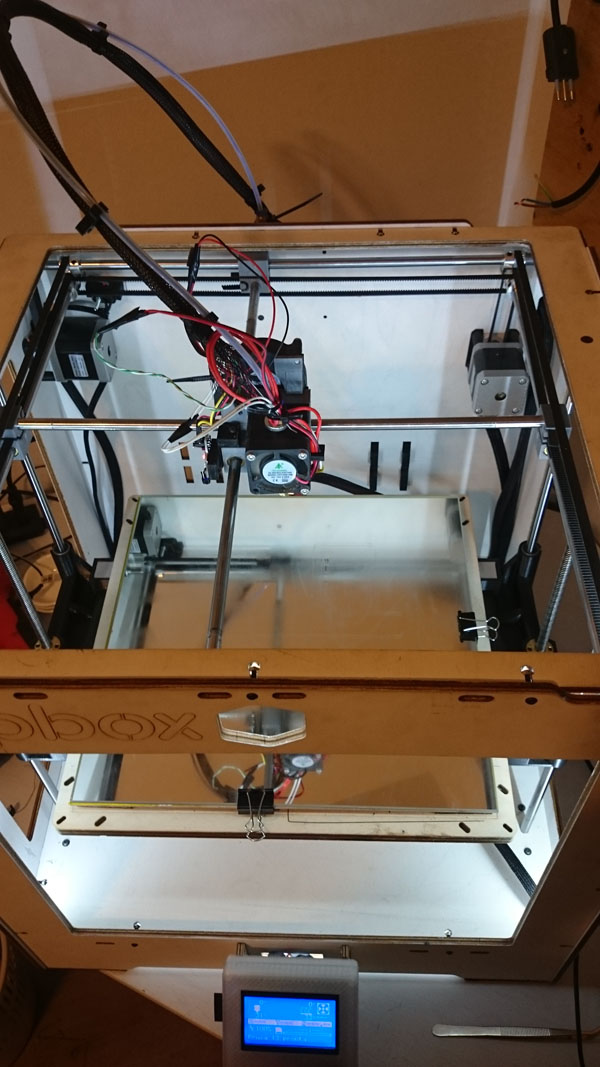
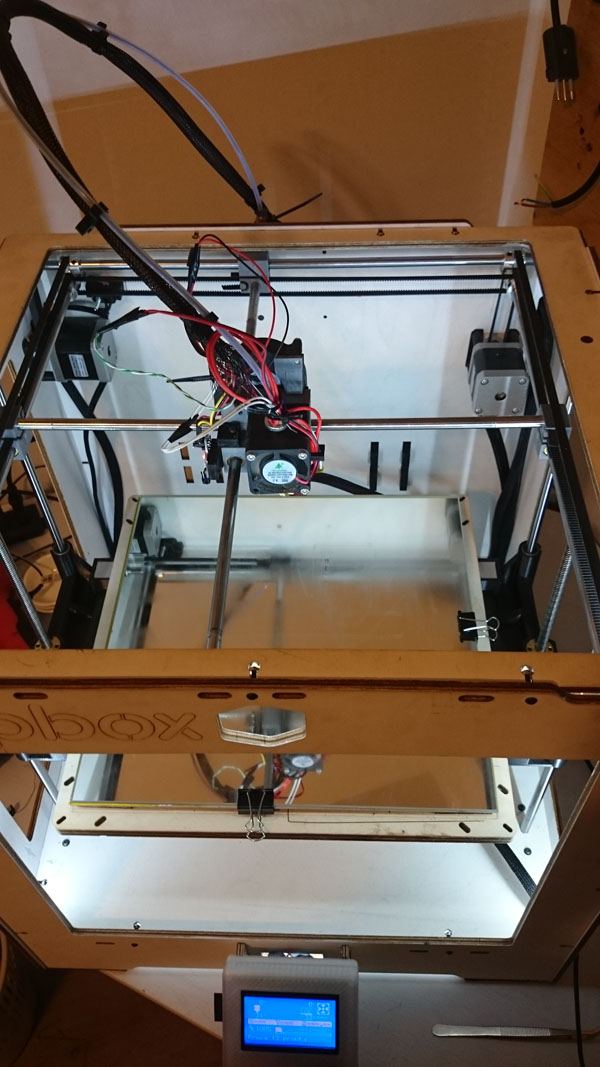
Vi ho allegato una immagine per capire meglio ed uno foto della stampante.
E' tutto il giorno che ho cercato una soluzione online ma non ho trovato niente, spero che qualcuno possa aiutarmi.
Buona serata a tutti
Edited 2 time(s). Last edit at 10/15/2015 04:10PM by davdino81.
La stampante funziona perfettamente eccetto il primo Layer, mi spiego meglio:
L'auto livellamento funziona e dai dati non sembra che il piatto stampa sia inclinato, quando però stampo il primo livello la metà di destra ha sempre l'ugello molto più vicino di quella di sinistra, più grande è l'oggetto più lo z cambia gradualmente da sinistra a destra (vedi foto allegata).
-Ho provato a girare lo specchio ed il problema persiste, la parte destra è sempre più schiacciata.
-Se non faccio l'auto livellamento il problema non si pone.
-Ho settato più volte lo z-index ma non cambia.
-Il test (g30) dice che il sensore funziona perfettamente.
- ho provato ad scambiare i contatti con i 2 motori dell'asse z ma niente.
-Ho letto le guide ma non ho trovato niente in riferimento.
Questa è la matrice che calcola
Eqn coefficients: a: -0.00172222 b: 0.00127777 d: 8.26950263 21:25:23.312 : echo: planeNormal x: 0.001722 y: -0.001278 z: 1.000000 21:25:23.312 : echo: set_bed_level_equation_lsq > current_position: (259.99, 260.01, 8.09) 21:25:23.312 : echo: Bed Level Correction Matrix: 21:25:23.327 : echo: +0.999999 +0.000000 -0.001722 21:25:23.327 : echo: +0.000002 +0.999999 +0.001278 21:25:23.327 : echo: +0.001722 -0.001278 +0.999998mentra M48 mi da questo risultato:
22:08:20.024 : Mean: 7.807250 22:08:20.024 : Standard Deviation: 0.011803
Per scrupolo vi mostro il settaggio ma penso sia corretto.
Vi ho allegato una immagine per capire meglio ed uno foto della stampante.
#define LEFT_PROBE_BED_POSITION 71
#define RIGHT_PROBE_BED_POSITION 311
#define FRONT_PROBE_BED_POSITION 20
#define BACK_PROBE_BED_POSITION 260
#define XY_TRAVEL_SPEED 10000
#define AUTO_BED_LEVELING_FEATURE
#define Z_PROBE_REPEATABILITY_TEST
#define AUTO_BED_LEVELING_GRID
#define MIN_PROBE_EDGE 10 // The probe square sides can be no smaller than this
#define AUTO_BED_LEVELING_GRID_POINTS 3
#define ABL_PROBE_PT_1_X 15
#define ABL_PROBE_PT_1_Y 180
#define ABL_PROBE_PT_2_X 15
#define ABL_PROBE_PT_2_Y 20
#define ABL_PROBE_PT_3_X 170
#define ABL_PROBE_PT_3_Y 20
#define X_PROBE_OFFSET_FROM_EXTRUDER 51 // Probe on: -left +right
#define Y_PROBE_OFFSET_FROM_EXTRUDER 0 // Probe on: -front +behind
#define Z_PROBE_OFFSET_FROM_EXTRUDER -7.77 // -below (always!)
#define Z_RAISE_BEFORE_HOMING 1 // (in mm) Raise Z before homing (G28) for Probe Clearance.
#define Z_RAISE_BEFORE_PROBING 6 //How much the extruder will be raised before travelling to the first probing point.
#define Z_RAISE_BETWEEN_PROBINGS 5 //How much the extruder will be raised when travelling from between next probing points
#define Z_RAISE_AFTER_PROBING 5 //How much the extruder will be raised after the last probing point.
E' tutto il giorno che ho cercato una soluzione online ma non ho trovato niente, spero che qualcuno possa aiutarmi.
Buona serata a tutti
Edited 2 time(s). Last edit at 10/15/2015 04:10PM by davdino81.
|
Re: MarlinKimbra 4.2 mi stampa sempre inclinato ! October 15, 2015 03:50PM |
Registered: 11 years ago Posts: 415 |
|
Re: MarlinKimbra 4.2 mi stampa sempre inclinato ! October 15, 2015 04:06PM |
Registered: 8 years ago Posts: 12 |
|
Re: MarlinKimbra 4.2 (e precedenti) mi stampa sempre inclinato ! October 15, 2015 05:53PM |
Registered: 8 years ago Posts: 1 |
La tua stampante ha due motori per la Z !
Senza autoleveling funziona bene !
Potrebbe trattarsi di un problema meccanico/elettrico riconducibile ad una perdita di qualche passo in ritrazione di uno dei due motori
Può essere un attrito troppo accentuato da uno dei due lati dovuto da una delle due colonne di guida o dalle barre filettate
Si potrebbe escludere un problema elettrico del motore se invertendo fisicamente i due motori tra loro il problema rimane dallo stesso lato,
ovviamente se cosi non fosse allora è uno dei due motori.
Ciao.
Senza autoleveling funziona bene !
Potrebbe trattarsi di un problema meccanico/elettrico riconducibile ad una perdita di qualche passo in ritrazione di uno dei due motori
Può essere un attrito troppo accentuato da uno dei due lati dovuto da una delle due colonne di guida o dalle barre filettate
Si potrebbe escludere un problema elettrico del motore se invertendo fisicamente i due motori tra loro il problema rimane dallo stesso lato,
ovviamente se cosi non fosse allora è uno dei due motori.
Ciao.
|
Re: MarlinKimbra 4.2 (e precedenti) mi stampa sempre inclinato ! October 16, 2015 02:39AM |
Registered: 10 years ago Posts: 6,409 |
Gli endstop sono giusti?
Xmin a sinistra e Ymin dietro?
Quando fai la home il carrello si sposta a sinistra e il piatto dietro?
Se tutto questo è giusto allora fai G29 V4 ti permette di vedere tutti i valori... A quel punto puoi constatare cosa legge da una parete e cosa dall'altra... Scrivi il log e verifichiamo!!!!
Edited 1 time(s). Last edit at 10/16/2015 05:42PM by MagoKimbra.
COMPRA ITALIANO - sostieni le nostre aziende - sostieni la nostra gente - sostieni il tuo popolo - sosterrai te stesso.
Alberto C. felice possessore di una Kossel K2
My Blog - My Thingiverse
Xmin a sinistra e Ymin dietro?
Quando fai la home il carrello si sposta a sinistra e il piatto dietro?
Se tutto questo è giusto allora fai G29 V4 ti permette di vedere tutti i valori... A quel punto puoi constatare cosa legge da una parete e cosa dall'altra... Scrivi il log e verifichiamo!!!!
Edited 1 time(s). Last edit at 10/16/2015 05:42PM by MagoKimbra.
COMPRA ITALIANO - sostieni le nostre aziende - sostieni la nostra gente - sostieni il tuo popolo - sosterrai te stesso.
Alberto C. felice possessore di una Kossel K2
My Blog - My Thingiverse
|
Re: MarlinKimbra 4.2 (e precedenti) mi stampa sempre inclinato ! October 16, 2015 02:51AM |
Registered: 8 years ago Posts: 12 |
Ciao, gli assi si muovo nella direzione corretta.
Ho provate a farli fare anche più punti ma il risultato è sempre lo stesso.
Questo è il risultato con G29 V4 con 5x5 punti
Ho provate a farli fare anche più punti ma il risultato è sempre lo stesso.
Questo è il risultato con G29 V4 con 5x5 punti
08:48:04.172 : echo: setup_for_endstop_move > enable_endstops(false) 08:48:04.557 : echo: setup_for_endstop_move > enable_endstops(true) 08:48:05.006 : echo: > TRIGGER ENDSTOP > current_position: (20.00, 13.00, 0.00) 08:48:05.006 : echo: set_axis_is_at_home 2 > (home_offset[axis]==0.00) > current_position: (20.00, 13.00, 8.21) 08:48:05.006 : echo: > AFTER set_axis_is_at_home > current_position: (20.00, 13.00, 8.21) 08:48:05.006 : echo: <<< homeaxis(2) 08:48:05.006 : echo: <<< Z_SAFE_HOMING 08:48:05.021 : echo: setup_for_endstop_move > enable_endstops(false) 08:48:05.021 : echo: <<< gcode_G28 08:48:05.021 : N32 M105 *54 08:48:05.488 : N33 M105 *55 08:48:08.547 : N34 M105 *48 08:48:11.615 : N35 M105 *49 08:48:14.678 : N36 M105 *50 08:48:14.975 : N37 G29 V4 *68 08:48:14.975 : echo: gcode_G29 >>> 08:48:14.975 : echo: G29 Auto Bed Leveling 08:48:14.990 : echo: setup_for_endstop_move > enable_endstops(true) 08:48:14.990 : echo: z_before = (before) 6.00 08:48:14.990 : echo: probe_pt >>> 08:48:14.990 : echo: > ProbeAction:1 > current_position: (20.00, 13.00, 8.21) 08:48:14.990 : echo: Z Raise to z_before 6.00 > do_blocking_move_to_z 6.00 08:48:15.006 : echo: do_blocking_move_to: (20.00, 13.00, 6.00) 08:48:15.006 : echo: > do_blocking_move_to_xy 20.00, 20.00 08:48:15.006 : echo: do_blocking_move_to: (20.00, 20.00, 6.00) 08:48:15.115 : echo: > ProbeDeploy 08:48:15.131 : echo: deploy_z_probe > current_position: (20.00, 20.00, 6.00) 08:48:15.959 : echo: run_z_probe > current_position: (20.00, 20.00, 8.18) 08:48:15.975 : echo: Bed X: 71.000 Y: 20.000 Z: 8.180 08:48:15.975 : echo: <<< probe_pt 08:48:15.975 : echo: z_before = (between) 13.18 08:48:15.975 : echo: probe_pt >>> 08:48:15.990 : echo: > ProbeAction:0 > current_position: (20.00, 20.00, 8.18) 08:48:15.990 : echo: Z Raise to z_before 13.18 > do_blocking_move_to_z 13.18 08:48:15.990 : echo: do_blocking_move_to: (20.00, 20.00, 13.18) 08:48:16.756 : echo: > do_blocking_move_to_xy 80.00, 20.00 08:48:16.756 : echo: do_blocking_move_to: (80.00, 20.00, 13.18) 08:48:18.834 : echo: run_z_probe > current_position: (80.00, 20.00, 7.25) 08:48:18.834 : echo: Bed X: 131.000 Y: 20.000 Z: 7.250 08:48:18.834 : echo: <<< probe_pt 08:48:18.850 : echo: z_before = (between) 12.25 08:48:18.850 : echo: probe_pt >>> 08:48:18.850 : echo: > ProbeAction:0 > current_position: (80.00, 20.00, 7.25) 08:48:18.865 : echo: Z Raise to z_before 12.25 > do_blocking_move_to_z 12.25 08:48:18.865 : echo: do_blocking_move_to: (80.00, 20.00, 12.25) 08:48:19.631 : echo: > do_blocking_move_to_xy 140.00, 20.00 08:48:19.631 : echo: do_blocking_move_to: (140.00, 20.00, 12.25) 08:48:21.548 : echo: run_z_probe > current_position: (140.00, 20.00, 7.53) 08:48:21.564 : echo: Bed X: 191.000 Y: 20.000 Z: 7.535 08:48:21.564 : echo: <<< probe_pt 08:48:21.564 : echo: z_before = (between) 12.53 08:48:21.564 : echo: probe_pt >>> 08:48:21.564 : echo: > ProbeAction:0 > current_position: (140.00, 20.00, 7.53) 08:48:21.579 : echo: Z Raise to z_before 12.53 > do_blocking_move_to_z 12.53 08:48:21.579 : echo: do_blocking_move_to: (140.00, 20.00, 12.53) 08:48:22.351 : echo: > do_blocking_move_to_xy 200.00, 20.00 08:48:22.355 : echo: do_blocking_move_to: (200.00, 20.00, 12.53) 08:48:24.290 : echo: run_z_probe > current_position: (200.00, 20.00, 7.71) 08:48:24.293 : echo: Bed X: 251.000 Y: 20.000 Z: 7.710 08:48:24.293 : echo: <<< probe_pt 08:48:24.297 : echo: z_before = (between) 12.71 08:48:24.301 : echo: probe_pt >>> 08:48:24.305 : echo: > ProbeAction:0 > current_position: (200.00, 20.00, 7.71) 08:48:24.309 : echo: Z Raise to z_before 12.71 > do_blocking_move_to_z 12.71 08:48:24.313 : echo: do_blocking_move_to: (200.00, 20.00, 12.71) 08:48:25.076 : echo: > do_blocking_move_to_xy 260.00, 20.00 08:48:25.076 : echo: do_blocking_move_to: (260.00, 20.00, 12.71) 08:48:27.109 : echo: run_z_probe > current_position: (260.00, 20.00, 8.10) 08:48:27.109 : echo: Bed X: 311.000 Y: 20.000 Z: 8.105 08:48:27.109 : echo: <<< probe_pt 08:48:27.125 : echo: z_before = (between) 13.10 08:48:27.125 : echo: probe_pt >>> 08:48:27.125 : echo: > ProbeAction:0 > current_position: (260.00, 20.00, 8.10) 08:48:27.125 : echo: Z Raise to z_before 13.10 > do_blocking_move_to_z 13.10 08:48:27.140 : echo: do_blocking_move_to: (260.00, 20.00, 13.10) 08:48:27.895 : echo: > do_blocking_move_to_xy 260.00, 80.00 08:48:27.910 : echo: do_blocking_move_to: (260.00, 80.00, 13.10) 08:48:29.854 : echo: run_z_probe > current_position: (260.00, 80.00, 8.21) 08:48:29.854 : echo: Bed X: 311.000 Y: 80.000 Z: 8.210 08:48:29.854 : echo: <<< probe_pt 08:48:29.854 : echo: z_before = (between) 13.21 08:48:29.854 : echo: probe_pt >>> 08:48:29.854 : echo: > ProbeAction:0 > current_position: (260.00, 80.00, 8.21) 08:48:29.869 : echo: Z Raise to z_before 13.21 > do_blocking_move_to_z 13.21 08:48:29.869 : echo: do_blocking_move_to: (260.00, 80.00, 13.21) 08:48:30.640 : echo: > do_blocking_move_to_xy 200.00, 80.00 08:48:30.640 : echo: do_blocking_move_to: (200.00, 80.00, 13.21) 08:48:32.680 : echo: run_z_probe > current_position: (200.00, 80.00, 7.98) 08:48:32.680 : echo: Bed X: 251.000 Y: 80.000 Z: 7.980 08:48:32.680 : echo: <<< probe_pt 08:48:32.680 : echo: z_before = (between) 12.98 08:48:32.680 : echo: probe_pt >>> 08:48:32.696 : echo: > ProbeAction:0 > current_position: (200.00, 80.00, 7.98) 08:48:32.696 : echo: Z Raise to z_before 12.98 > do_blocking_move_to_z 12.98 08:48:32.696 : echo: do_blocking_move_to: (200.00, 80.00, 12.98) 08:48:33.463 : echo: > do_blocking_move_to_xy 140.00, 80.00 08:48:33.463 : echo: do_blocking_move_to: (140.00, 80.00, 12.98) 08:48:35.408 : echo: run_z_probe > current_position: (140.00, 80.00, 8.10) 08:48:35.423 : echo: Bed X: 191.000 Y: 80.000 Z: 8.100 08:48:35.423 : echo: <<< probe_pt 08:48:35.423 : echo: z_before = (between) 13.10 08:48:35.423 : echo: probe_pt >>> 08:48:35.423 : echo: > ProbeAction:0 > current_position: (140.00, 80.00, 8.10) 08:48:35.439 : echo: Z Raise to z_before 13.10 > do_blocking_move_to_z 13.10 08:48:35.439 : echo: do_blocking_move_to: (140.00, 80.00, 13.10) 08:48:36.206 : echo: > do_blocking_move_to_xy 80.00, 80.00 08:48:36.206 : echo: do_blocking_move_to: (80.00, 80.00, 13.10) 08:48:38.316 : echo: run_z_probe > current_position: (80.00, 80.00, 7.32) 08:48:38.320 : echo: Bed X: 131.000 Y: 80.000 Z: 7.325 08:48:38.320 : echo: <<< probe_pt 08:48:38.324 : echo: z_before = (between) 12.32 08:48:38.324 : echo: probe_pt >>> 08:48:38.332 : echo: > ProbeAction:0 > current_position: (80.00, 80.00, 7.32) 08:48:38.337 : echo: Z Raise to z_before 12.32 > do_blocking_move_to_z 12.32 08:48:38.343 : echo: do_blocking_move_to: (80.00, 80.00, 12.32) 08:48:39.102 : echo: > do_blocking_move_to_xy 20.00, 80.00 08:48:39.106 : echo: do_blocking_move_to: (20.00, 80.00, 12.32) 08:48:40.896 : echo: run_z_probe > current_position: (20.00, 80.00, 8.67) 08:48:40.896 : echo: Bed X: 71.000 Y: 80.000 Z: 8.665 08:48:40.896 : echo: <<< probe_pt 08:48:40.896 : echo: z_before = (between) 13.67 08:48:40.896 : echo: probe_pt >>> 08:48:40.911 : echo: > ProbeAction:0 > current_position: (20.00, 80.00, 8.67) 08:48:40.911 : echo: Z Raise to z_before 13.67 > do_blocking_move_to_z 13.67 08:48:40.911 : echo: do_blocking_move_to: (20.00, 80.00, 13.67) 08:48:41.687 : echo: > do_blocking_move_to_xy 20.00, 140.00 08:48:41.691 : echo: do_blocking_move_to: (20.00, 140.00, 13.67) 08:48:43.640 : echo: run_z_probe > current_position: (20.00, 140.00, 8.74) 08:48:43.640 : echo: Bed X: 71.000 Y: 140.000 Z: 8.743 08:48:43.640 : echo: <<< probe_pt 08:48:43.640 : echo: z_before = (between) 13.74 08:48:43.640 : echo: probe_pt >>> 08:48:43.640 : echo: > ProbeAction:0 > current_position: (20.00, 140.00, 8.74) 08:48:43.655 : echo: Z Raise to z_before 13.74 > do_blocking_move_to_z 13.74 08:48:43.655 : echo: do_blocking_move_to: (20.00, 140.00, 13.74) 08:48:44.468 : echo: > do_blocking_move_to_xy 80.00, 140.00 08:48:44.468 : echo: do_blocking_move_to: (80.00, 140.00, 13.74) 08:48:46.593 : echo: run_z_probe > current_position: (80.00, 140.00, 7.51) 08:48:46.598 : echo: Bed X: 131.000 Y: 140.000 Z: 7.515 08:48:46.598 : echo: <<< probe_pt 08:48:46.602 : echo: z_before = (between) 12.51 08:48:46.602 : echo: probe_pt >>> 08:48:46.610 : echo: > ProbeAction:0 > current_position: (80.00, 140.00, 7.51) 08:48:46.614 : echo: Z Raise to z_before 12.51 > do_blocking_move_to_z 12.51 08:48:46.618 : echo: do_blocking_move_to: (80.00, 140.00, 12.51) 08:48:47.380 : echo: > do_blocking_move_to_xy 140.00, 140.00 08:48:47.380 : echo: do_blocking_move_to: (140.00, 140.00, 12.51) 08:48:49.278 : echo: run_z_probe > current_position: (140.00, 140.00, 8.21) 08:48:49.281 : echo: Bed X: 191.000 Y: 140.000 Z: 8.208 08:48:49.285 : echo: <<< probe_pt 08:48:49.285 : echo: z_before = (between) 13.21 08:48:49.289 : echo: probe_pt >>> 08:48:49.293 : echo: > ProbeAction:0 > current_position: (140.00, 140.00, 8.21) 08:48:49.297 : echo: Z Raise to z_before 13.21 > do_blocking_move_to_z 13.21 08:48:49.305 : echo: do_blocking_move_to: (140.00, 140.00, 13.21) 08:48:50.063 : echo: > do_blocking_move_to_xy 200.00, 140.00 08:48:50.063 : echo: do_blocking_move_to: (200.00, 140.00, 13.21) 08:48:51.988 : echo: run_z_probe > current_position: (200.00, 140.00, 8.75) 08:48:51.992 : echo: Bed X: 251.000 Y: 140.000 Z: 8.748 08:48:51.997 : echo: <<< probe_pt 08:48:51.997 : echo: z_before = (between) 13.75 08:48:52.001 : echo: probe_pt >>> 08:48:52.005 : echo: > ProbeAction:0 > current_position: (200.00, 140.00, 8.75) 08:48:52.013 : echo: Z Raise to z_before 13.75 > do_blocking_move_to_z 13.75 08:48:52.015 : echo: do_blocking_move_to: (200.00, 140.00, 13.75) 08:48:52.767 : echo: > do_blocking_move_to_xy 260.00, 140.00 08:48:52.783 : echo: do_blocking_move_to: (260.00, 140.00, 13.75) 08:48:54.727 : echo: run_z_probe > current_position: (260.00, 140.00, 8.73) 08:48:54.743 : echo: Bed X: 311.000 Y: 140.000 Z: 8.732 08:48:54.743 : echo: <<< probe_pt 08:48:54.743 : echo: z_before = (between) 13.73 08:48:54.743 : echo: probe_pt >>> 08:48:54.759 : echo: > ProbeAction:0 > current_position: (260.00, 140.00, 8.73) 08:48:54.759 : echo: Z Raise to z_before 13.73 > do_blocking_move_to_z 13.73 08:48:54.759 : echo: do_blocking_move_to: (260.00, 140.00, 13.73) 08:48:55.523 : echo: > do_blocking_move_to_xy 260.00, 200.00 08:48:55.523 : echo: do_blocking_move_to: (260.00, 200.00, 13.73) 08:48:57.584 : echo: run_z_probe > current_position: (260.00, 200.00, 8.27) 08:48:57.588 : echo: Bed X: 311.000 Y: 200.000 Z: 8.270 08:48:57.589 : echo: <<< probe_pt 08:48:57.592 : echo: z_before = (between) 13.27 08:48:57.593 : echo: probe_pt >>> 08:48:57.598 : echo: > ProbeAction:0 > current_position: (260.00, 200.00, 8.27) 08:48:57.598 : echo: Z Raise to z_before 13.27 > do_blocking_move_to_z 13.27 08:48:57.598 : echo: do_blocking_move_to: (260.00, 200.00, 13.27) 08:48:58.366 : echo: > do_blocking_move_to_xy 200.00, 200.00 08:48:58.366 : echo: do_blocking_move_to: (200.00, 200.00, 13.27) 08:49:00.285 : echo: run_z_probe > current_position: (200.00, 200.00, 8.58) 08:49:00.301 : echo: Bed X: 251.000 Y: 200.000 Z: 8.583 08:49:00.301 : echo: <<< probe_pt 08:49:00.301 : echo: z_before = (between) 13.58 08:49:00.301 : echo: probe_pt >>> 08:49:00.301 : echo: > ProbeAction:0 > current_position: (200.00, 200.00, 8.58) 08:49:00.317 : echo: Z Raise to z_before 13.58 > do_blocking_move_to_z 13.58 08:49:00.317 : echo: do_blocking_move_to: (200.00, 200.00, 13.58) 08:49:01.089 : echo: > do_blocking_move_to_xy 140.00, 200.00 08:49:01.089 : echo: do_blocking_move_to: (140.00, 200.00, 13.58) 08:49:03.184 : echo: run_z_probe > current_position: (140.00, 200.00, 7.84) 08:49:03.189 : echo: Bed X: 191.000 Y: 200.000 Z: 7.843 08:49:03.193 : echo: <<< probe_pt 08:49:03.193 : echo: z_before = (between) 12.84 08:49:03.196 : echo: probe_pt >>> 08:49:03.196 : echo: > ProbeAction:0 > current_position: (140.00, 200.00, 7.84) 08:49:03.196 : echo: Z Raise to z_before 12.84 > do_blocking_move_to_z 12.84 08:49:03.196 : echo: do_blocking_move_to: (140.00, 200.00, 12.84) 08:49:03.971 : echo: > do_blocking_move_to_xy 80.00, 200.00 08:49:03.971 : echo: do_blocking_move_to: (80.00, 200.00, 12.84) 08:49:05.961 : echo: run_z_probe > current_position: (80.00, 200.00, 7.65) 08:49:05.965 : echo: Bed X: 131.000 Y: 200.000 Z: 7.650 08:49:05.965 : echo: <<< probe_pt 08:49:05.969 : echo: z_before = (between) 12.65 08:49:05.973 : echo: probe_pt >>> 08:49:05.977 : echo: > ProbeAction:0 > current_position: (80.00, 200.00, 7.65) 08:49:05.981 : echo: Z Raise to z_before 12.65 > do_blocking_move_to_z 12.65 08:49:05.985 : echo: do_blocking_move_to: (80.00, 200.00, 12.65) 08:49:06.812 : echo: > do_blocking_move_to_xy 20.00, 200.00 08:49:06.812 : echo: do_blocking_move_to: (20.00, 200.00, 12.65) 08:49:08.627 : echo: run_z_probe > current_position: (20.00, 200.00, 8.88) 08:49:08.627 : echo: Bed X: 71.000 Y: 200.000 Z: 8.880 08:49:08.627 : echo: <<< probe_pt 08:49:08.627 : echo: z_before = (between) 13.88 08:49:08.627 : echo: probe_pt >>> 08:49:08.627 : echo: > ProbeAction:0 > current_position: (20.00, 200.00, 8.88) 08:49:08.642 : echo: Z Raise to z_before 13.88 > do_blocking_move_to_z 13.88 08:49:08.642 : echo: do_blocking_move_to: (20.00, 200.00, 13.88) 08:49:09.414 : echo: > do_blocking_move_to_xy 20.00, 260.00 08:49:09.414 : echo: do_blocking_move_to: (20.00, 260.00, 13.88) 08:49:11.335 : echo: run_z_probe > current_position: (20.00, 260.00, 9.20) 08:49:11.335 : echo: Bed X: 71.000 Y: 260.000 Z: 9.200 08:49:11.335 : echo: <<< probe_pt 08:49:11.335 : echo: z_before = (between) 14.20 08:49:11.335 : echo: probe_pt >>> 08:49:11.350 : echo: > ProbeAction:0 > current_position: (20.00, 260.00, 9.20) 08:49:11.350 : echo: Z Raise to z_before 14.20 > do_blocking_move_to_z 14.20 08:49:11.350 : echo: do_blocking_move_to: (20.00, 260.00, 14.20) 08:49:12.118 : echo: > do_blocking_move_to_xy 80.00, 260.00 08:49:12.118 : echo: do_blocking_move_to: (80.00, 260.00, 14.20) 08:49:14.344 : echo: run_z_probe > current_position: (80.00, 260.00, 7.75) 08:49:14.346 : echo: Bed X: 131.000 Y: 260.000 Z: 7.745 08:49:14.349 : echo: <<< probe_pt 08:49:14.349 : echo: z_before = (between) 12.75 08:49:14.349 : echo: probe_pt >>> 08:49:14.349 : echo: > ProbeAction:0 > current_position: (80.00, 260.00, 7.75) 08:49:14.349 : echo: Z Raise to z_before 12.75 > do_blocking_move_to_z 12.75 08:49:14.365 : echo: do_blocking_move_to: (80.00, 260.00, 12.75) 08:49:15.131 : echo: > do_blocking_move_to_xy 140.00, 260.00 08:49:15.131 : echo: do_blocking_move_to: (140.00, 260.00, 12.75) 08:49:17.097 : echo: run_z_probe > current_position: (140.00, 260.00, 7.69) 08:49:17.097 : echo: Bed X: 191.000 Y: 260.000 Z: 7.685 08:49:17.097 : echo: <<< probe_pt 08:49:17.097 : echo: z_before = (between) 12.68 08:49:17.097 : echo: probe_pt >>> 08:49:17.113 : echo: > ProbeAction:0 > current_position: (140.00, 260.00, 7.69) 08:49:17.113 : echo: Z Raise to z_before 12.68 > do_blocking_move_to_z 12.68 08:49:17.113 : echo: do_blocking_move_to: (140.00, 260.00, 12.68) 08:49:17.958 : echo: > do_blocking_move_to_xy 200.00, 260.00 08:49:17.973 : echo: do_blocking_move_to: (200.00, 260.00, 12.68) 08:49:19.912 : echo: run_z_probe > current_position: (200.00, 260.00, 7.89) 08:49:19.912 : echo: Bed X: 251.000 Y: 260.000 Z: 7.888 08:49:19.921 : echo: <<< probe_pt 08:49:19.926 : echo: z_before = (between) 12.89 08:49:19.926 : echo: probe_pt >>> 08:49:19.930 : echo: > ProbeAction:2 > current_position: (200.00, 260.00, 7.89) 08:49:19.938 : echo: Z Raise to z_before 12.89 > do_blocking_move_to_z 12.89 08:49:19.942 : echo: do_blocking_move_to: (200.00, 260.00, 12.89) 08:49:20.704 : echo: > do_blocking_move_to_xy 260.00, 260.00 08:49:20.704 : echo: do_blocking_move_to: (260.00, 260.00, 12.89) 08:49:22.648 : echo: run_z_probe > current_position: (260.00, 260.00, 7.94) 08:49:22.664 : echo: > ProbeStow (stow_z_probe will do Z Raise) 08:49:22.664 : echo: stow_z_probe > current_position: (260.00, 260.00, 7.94) 08:49:22.664 : echo: Bed X: 311.000 Y: 260.000 Z: 7.943 08:49:22.664 : echo: <<< probe_pt 08:49:22.679 : echo: > probing complete > current_position: (260.00, 260.00, 7.94) 08:49:22.679 : echo: setup_for_endstop_move > enable_endstops(false) 08:49:22.711 : echo: Eqn coefficients: a: -0.00046416 b: 0.00143501 d: 7.99535417 08:49:22.711 : echo: planeNormal x: 0.000464 y: -0.001435 z: 1.000000 08:49:22.726 : echo: set_bed_level_equation_lsq > current_position: (260.00, 260.01, 7.69) 08:49:22.726 : echo: +-----------+ 08:49:22.726 : echo: |...Back....| 08:49:22.726 : echo: |Left..Right| 08:49:22.726 : echo: |...Front...| 08:49:22.726 : echo: +-----------+ 08:49:22.742 : echo: Measured Bed Topography: 08:49:22.742 : echo: +9.20000 +7.74500 +7.68500 +7.88750 +7.94250 08:49:22.742 : echo: +8.88000 +7.65000 +7.84250 +8.58250 +8.27000 08:49:22.757 : echo: +8.74250 +7.51500 +8.20750 +8.74750 +8.73250 08:49:22.757 : echo: +8.66500 +7.32500 +8.10000 +7.98000 +8.21000 08:49:22.757 : echo: +8.18000 +7.25000 +7.53500 +7.71000 +8.10500 08:49:22.772 : echo: Corrected Bed Topography: 08:49:22.776 : echo: +1.95000 +0.49500 +0.43500 +0.63750 +0.69250 08:49:22.781 : echo: +1.63000 +0.40000 +0.59250 +1.33250 +1.02000 08:49:22.785 : echo: +1.49250 +0.26500 +0.95750 +1.49750 +1.48250 08:49:22.789 : echo: +1.41500 +0.07500 +0.85000 +0.73000 +0.96000 08:49:22.797 : echo: +0.93000 +0.00000 +0.28500 +0.46000 +0.85500 08:49:22.801 : echo: Corrected Bed Topography in new coordinates: 08:49:22.805 : echo: +1.58885 +0.16170 +0.12955 +0.35990 +0.44275 08:49:22.809 : echo: +1.35495 +0.15280 +0.37315 +1.14100 +0.85635 08:49:22.813 : echo: +1.30355 +0.10390 +0.82425 +1.39210 +1.40495 08:49:22.815 : echo: +1.31215 +0.00000 +0.80285 +0.71070 +0.96855 08:49:22.827 : echo: +0.91325 +0.01110 +0.32395 +0.52680 +0.94965 08:49:22.827 : echo: Height from Bed to Nozzle 08:49:22.831 : echo: (+) above, or (-) below surface : 08:49:22.835 : echo: +0.00000 +1.42715 +1.45930 +1.22895 +1.14610 08:49:22.843 : echo: +0.23390 +1.43605 +1.21570 +0.44785 +0.73250 08:49:22.847 : echo: +0.28530 +1.48495 +0.76460 +0.19675 +0.18390 08:49:22.851 : echo: +0.27670 +1.58885 +0.78600 +0.87815 +0.62030 08:49:22.855 : echo: +0.67560 +1.57775 +1.26490 +1.06205 +0.63920 08:49:22.859 : echo: Bed Level Correction Matrix: 08:49:22.863 : echo: +1.000000 +0.000000 -0.000464 08:49:22.868 : echo: +0.000001 +0.999999 +0.001435 08:49:22.868 : echo: +0.000464 -0.001435 +0.999999 08:49:22.875 : echo: > AFTER apply_rotation_xyz > current_position[Z_AXIS]= 7.06390 08:49:22.876 : echo: <<< gcode_G29 08:49:22.879 : N38 M105 *60 08:49:22.879 : echo: X:260.00 Y:260.01 Z:7.06 E:0.00 Count X: 260.00 Y:260.00 Z:7.32 08:49:25.254 : N39 M105 *61
|
Re: MarlinKimbra 4.2 (e precedenti) mi stampa sempre inclinato ! October 16, 2015 03:30AM |
Registered: 8 years ago Posts: 12 |
Ciao, i movimento sono corretti.
Ho provato a fare un'altro test:
Ho livellato il piano ad occhio e controllato muovendo il carrello tramite repeteirhost ed il piano era perfettamente livellato ed i movimenti erano perfetti. Ho mosso il piano su e giù tramite i comandi g1 ed il piano e rimasto livellato.
Ho poi eseguito il g29 v4 (5x5 punti) di cui allego i risultati perché se lo posto mi va in revisione. Se adesso mi sposto con i comandi ho il solito problema cioè è più schiacciato sul lato destro, da lato a lato ho quasi un mm di differenza,, ovviamente quando mi sposto sull'asse x l'asse z compensa ed è proprio questo che crea il problema.
Cosa potrebbe essere ?
Grazie mille
e provato a muovere il carrello sempre tramite i comandi di repeterihost ma adesso i movimenti mi davano il solito errore di schiacciamento sulla parte destra.
Ho provato a fare un'altro test:
Ho livellato il piano ad occhio e controllato muovendo il carrello tramite repeteirhost ed il piano era perfettamente livellato ed i movimenti erano perfetti. Ho mosso il piano su e giù tramite i comandi g1 ed il piano e rimasto livellato.
Ho poi eseguito il g29 v4 (5x5 punti) di cui allego i risultati perché se lo posto mi va in revisione. Se adesso mi sposto con i comandi ho il solito problema cioè è più schiacciato sul lato destro, da lato a lato ho quasi un mm di differenza,, ovviamente quando mi sposto sull'asse x l'asse z compensa ed è proprio questo che crea il problema.
Cosa potrebbe essere ?
Grazie mille
e provato a muovere il carrello sempre tramite i comandi di repeterihost ma adesso i movimenti mi davano il solito errore di schiacciamento sulla parte destra.
|
Re: MarlinKimbra 4.2 (e precedenti) mi stampa sempre inclinato ! October 16, 2015 12:57PM |
Registered: 8 years ago Posts: 12 |
|
Re: MarlinKimbra 4.2 (e precedenti) mi stampa sempre inclinato ! October 16, 2015 05:41PM |
Registered: 10 years ago Posts: 6,409 |
Allora tu dici di avere il piano dritto, ma ha quasi 2 mm da sinistra a destra...
Ti ripeto sicuro di avere X min a sinistra e y min dietro??
COMPRA ITALIANO - sostieni le nostre aziende - sostieni la nostra gente - sostieni il tuo popolo - sosterrai te stesso.
Alberto C. felice possessore di una Kossel K2
My Blog - My Thingiverse
09:25:30.907 : echo: Corrected Bed Topography: 09:25:30.911 : echo: +2.16500 +0.47500 +0.38250 +0.27750 +0.33500 09:25:30.915 : echo: +2.03250 +0.45000 +0.52250 +1.24750 +0.57250 09:25:30.919 : echo: +1.86000 +0.28000 +0.57500 +1.50500 +1.09500 09:25:30.927 : echo: +1.87250 +0.23250 +0.77250 +0.50250 +0.48000 09:25:30.931 : echo: +1.10500 +0.09750 +0.00000 +0.09500 +0.35250Cmq il problema che hai te normalmente accade quando si ha uno degli assi rovesciato e quindi la matrice viene specchiata come i pezzi...
Ti ripeto sicuro di avere X min a sinistra e y min dietro??
COMPRA ITALIANO - sostieni le nostre aziende - sostieni la nostra gente - sostieni il tuo popolo - sosterrai te stesso.
Alberto C. felice possessore di una Kossel K2
My Blog - My Thingiverse
|
Re: MarlinKimbra 4.2 (e precedenti) mi stampa sempre inclinato ! October 16, 2015 05:49PM |
Registered: 8 years ago Posts: 12 |
Scusa ma allora ho capito male, quando vado a x0 y0 il carrello va a sinistra ed avanti (verso di me), nel config.cartesian ho dovuto mettere true all'inverter dell'asse y.
Devo cambiare qualcosa nel settaggio ?
Grazie mille
Edited 1 time(s). Last edit at 10/16/2015 05:50PM by davdino81.
Devo cambiare qualcosa nel settaggio ?
Grazie mille
Edited 1 time(s). Last edit at 10/16/2015 05:50PM by davdino81.
|
Re: MarlinKimbra 4.2 (e precedenti) mi stampa sempre inclinato ! October 16, 2015 06:09PM |
Registered: 10 years ago Posts: 6,409 |
Ecco lo sapevo!!!
Ricapitoliamo per vedere se ci siamo capiti... L'endstop Y è dietro?
Se invece è davanti verso di te è sbagliato che sia un Ymin ma deve essere un Ymax. Il mio consiglio è spostarlo dietro senza cambiare nulla. Inoltre rimetti false a inverter asse Y...
COMPRA ITALIANO - sostieni le nostre aziende - sostieni la nostra gente - sostieni il tuo popolo - sosterrai te stesso.
Alberto C. felice possessore di una Kossel K2
My Blog - My Thingiverse
Ricapitoliamo per vedere se ci siamo capiti... L'endstop Y è dietro?
Se invece è davanti verso di te è sbagliato che sia un Ymin ma deve essere un Ymax. Il mio consiglio è spostarlo dietro senza cambiare nulla. Inoltre rimetti false a inverter asse Y...
COMPRA ITALIANO - sostieni le nostre aziende - sostieni la nostra gente - sostieni il tuo popolo - sosterrai te stesso.
Alberto C. felice possessore di una Kossel K2
My Blog - My Thingiverse
|
Re: MarlinKimbra 4.2 (e precedenti) mi stampa sempre inclinato ! October 16, 2015 06:14PM |
Registered: 8 years ago Posts: 12 |
|
Re: MarlinKimbra 4.2 (e precedenti) mi stampa sempre inclinato ! October 17, 2015 03:40AM |
Registered: 11 years ago Posts: 514 |
|
Re: MarlinKimbra 4.2 (e precedenti) mi stampa sempre inclinato ! October 17, 2015 05:06AM |
Registered: 8 years ago Posts: 12 |
Ho spostato l'endstop e rimesso false, il problema però è rimasto lo stesso.
Ho provato anche con il marlin originale ma non cambia niente.
Cosa diavolo può essere?
Intento grazie a tutti.
questo è il nuovo g29 v4:
Edited 2 time(s). Last edit at 10/17/2015 05:13AM by davdino81.
Ho provato anche con il marlin originale ma non cambia niente.
Cosa diavolo può essere?
Intento grazie a tutti.
questo è il nuovo g29 v4:
11:11:57.612 : N30 G29 V4 *67 11:11:57.612 : echo: gcode_G29 >>> 11:11:57.612 : echo: G29 Auto Bed Leveling 11:11:57.612 : echo: setup_for_endstop_move > enable_endstops(true) 11:11:57.627 : echo: z_before = (before) 6.00 11:11:57.627 : echo: probe_pt >>> 11:11:57.627 : echo: > ProbeAction:1 > current_position: (20.00, 20.00, 7.49) 11:11:57.627 : echo: Z Raise to z_before 6.00 > do_blocking_move_to_z 6.00 11:11:57.643 : echo: do_blocking_move_to: (20.00, 20.00, 6.00) 11:11:57.643 : echo: > do_blocking_move_to_xy 20.00, 20.00 11:11:57.643 : echo: do_blocking_move_to: (20.00, 20.00, 6.00) 11:11:57.643 : echo: > ProbeDeploy 11:11:57.658 : echo: deploy_z_probe > current_position: (20.00, 20.00, 6.00) 11:11:58.362 : echo: run_z_probe > current_position: (20.00, 20.00, 7.52) 11:11:58.377 : echo: Bed X: 71.000 Y: 20.000 Z: 7.520 11:11:58.377 : echo: <<< probe_pt 11:11:58.377 : echo: z_before = (between) 12.52 11:11:58.377 : echo: probe_pt >>> 11:11:58.377 : echo: > ProbeAction:0 > current_position: (20.00, 20.00, 7.52) 11:11:58.393 : echo: Z Raise to z_before 12.52 > do_blocking_move_to_z 12.52 11:11:58.393 : echo: do_blocking_move_to: (20.00, 20.00, 12.52) 11:11:59.158 : echo: > do_blocking_move_to_xy 140.00, 20.00 11:11:59.158 : echo: do_blocking_move_to: (140.00, 20.00, 12.52) 11:12:01.415 : echo: run_z_probe > current_position: (140.00, 20.00, 7.09) 11:12:01.415 : echo: Bed X: 191.000 Y: 20.000 Z: 7.095 11:12:01.415 : echo: <<< probe_pt 11:12:01.431 : echo: z_before = (between) 12.09 11:12:01.431 : echo: probe_pt >>> 11:12:01.431 : echo: > ProbeAction:0 > current_position: (140.00, 20.00, 7.09) 11:12:01.431 : echo: Z Raise to z_before 12.09 > do_blocking_move_to_z 12.09 11:12:01.447 : echo: do_blocking_move_to: (140.00, 20.00, 12.09) 11:12:02.212 : echo: > do_blocking_move_to_xy 260.00, 20.00 11:12:02.212 : echo: do_blocking_move_to: (260.00, 20.00, 12.09) 11:12:04.337 : echo: run_z_probe > current_position: (260.00, 20.00, 7.62) 11:12:04.353 : echo: Bed X: 311.000 Y: 20.000 Z: 7.618 11:12:04.353 : echo: <<< probe_pt 11:12:04.353 : echo: z_before = (between) 12.62 11:12:04.353 : echo: probe_pt >>> 11:12:04.353 : echo: > ProbeAction:0 > current_position: (260.00, 20.00, 7.62) 11:12:04.368 : echo: Z Raise to z_before 12.62 > do_blocking_move_to_z 12.62 11:12:04.368 : echo: do_blocking_move_to: (260.00, 20.00, 12.62) 11:12:05.125 : echo: > do_blocking_move_to_xy 260.00, 140.00 11:12:05.141 : echo: do_blocking_move_to: (260.00, 140.00, 12.62) 11:12:07.328 : echo: run_z_probe > current_position: (260.00, 140.00, 7.87) 11:12:07.328 : echo: Bed X: 311.000 Y: 140.000 Z: 7.870 11:12:07.344 : echo: <<< probe_pt 11:12:07.344 : echo: z_before = (between) 12.87 11:12:07.344 : echo: probe_pt >>> 11:12:07.344 : echo: > ProbeAction:0 > current_position: (260.00, 140.00, 7.87) 11:12:07.360 : echo: Z Raise to z_before 12.87 > do_blocking_move_to_z 12.87 11:12:07.360 : echo: do_blocking_move_to: (260.00, 140.00, 12.87) 11:12:08.122 : echo: > do_blocking_move_to_xy 140.00, 140.00 11:12:08.122 : echo: do_blocking_move_to: (140.00, 140.00, 12.87) 11:12:10.408 : echo: run_z_probe > current_position: (140.00, 140.00, 7.27) 11:12:10.408 : echo: Bed X: 191.000 Y: 140.000 Z: 7.268 11:12:10.408 : echo: <<< probe_pt 11:12:10.408 : echo: z_before = (between) 12.27 11:12:10.408 : echo: probe_pt >>> 11:12:10.424 : echo: > ProbeAction:0 > current_position: (140.00, 140.00, 7.27) 11:12:10.424 : echo: Z Raise to z_before 12.27 > do_blocking_move_to_z 12.27 11:12:10.424 : echo: do_blocking_move_to: (140.00, 140.00, 12.27) 11:12:11.190 : echo: > do_blocking_move_to_xy 20.00, 140.00 11:12:11.190 : echo: do_blocking_move_to: (20.00, 140.00, 12.27) 11:12:13.373 : echo: run_z_probe > current_position: (20.00, 140.00, 7.38) 11:12:13.388 : echo: Bed X: 71.000 Y: 140.000 Z: 7.378 11:12:13.388 : echo: <<< probe_pt 11:12:13.388 : echo: z_before = (between) 12.38 11:12:13.388 : echo: probe_pt >>> 11:12:13.404 : echo: > ProbeAction:0 > current_position: (20.00, 140.00, 7.38) 11:12:13.404 : echo: Z Raise to z_before 12.38 > do_blocking_move_to_z 12.38 11:12:13.404 : echo: do_blocking_move_to: (20.00, 140.00, 12.38) 11:12:14.170 : echo: > do_blocking_move_to_xy 20.00, 260.00 11:12:14.170 : echo: do_blocking_move_to: (20.00, 260.00, 12.38) 11:12:16.377 : echo: run_z_probe > current_position: (20.00, 260.00, 7.42) 11:12:16.377 : echo: Bed X: 71.000 Y: 260.000 Z: 7.418 11:12:16.377 : echo: <<< probe_pt 11:12:16.377 : echo: z_before = (between) 12.42 11:12:16.377 : echo: probe_pt >>> 11:12:16.392 : echo: > ProbeAction:0 > current_position: (20.00, 260.00, 7.42) 11:12:16.392 : echo: Z Raise to z_before 12.42 > do_blocking_move_to_z 12.42 11:12:16.392 : echo: do_blocking_move_to: (20.00, 260.00, 12.42) 11:12:17.158 : echo: > do_blocking_move_to_xy 140.00, 260.00 11:12:17.158 : echo: do_blocking_move_to: (140.00, 260.00, 12.42) 11:12:19.459 : echo: run_z_probe > current_position: (140.00, 260.00, 6.69) 11:12:19.459 : echo: Bed X: 191.000 Y: 260.000 Z: 6.693 11:12:19.459 : echo: <<< probe_pt 11:12:19.459 : echo: z_before = (between) 11.69 11:12:19.459 : echo: probe_pt >>> 11:12:19.475 : echo: > ProbeAction:2 > current_position: (140.00, 260.00, 6.69) 11:12:19.475 : echo: Z Raise to z_before 11.69 > do_blocking_move_to_z 11.69 11:12:19.475 : echo: do_blocking_move_to: (140.00, 260.00, 11.69) 11:12:20.241 : echo: > do_blocking_move_to_xy 260.00, 260.00 11:12:20.241 : echo: do_blocking_move_to: (260.00, 260.00, 11.69) 11:12:22.381 : echo: run_z_probe > current_position: (260.00, 260.00, 7.16) 11:12:22.397 : echo: > ProbeStow (stow_z_probe will do Z Raise) 11:12:22.397 : echo: stow_z_probe > current_position: (260.00, 260.00, 7.16) 11:12:22.397 : echo: Bed X: 311.000 Y: 260.000 Z: 7.163 11:12:22.413 : echo: <<< probe_pt 11:12:22.413 : echo: > probing complete > current_position: (260.00, 260.00, 7.16) 11:12:22.413 : echo: setup_for_endstop_move > enable_endstops(false) 11:12:22.428 : echo: Eqn coefficients: a: 0.00046528 b: -0.00133334 d: 7.43335628 11:12:22.428 : echo: planeNormal x: -0.000465 y: 0.001333 z: 1.000000 11:12:22.444 : echo: set_bed_level_equation_lsq > current_position: (260.00, 259.99, 7.39) 11:12:22.444 : echo: +-----------+ 11:12:22.444 : echo: |...Back....| 11:12:22.444 : echo: |Left..Right| 11:12:22.444 : echo: |...Front...| 11:12:22.459 : echo: +-----------+ 11:12:22.459 : echo: Measured Bed Topography: 11:12:22.459 : echo: +7.41750 +6.69250 +7.16250 11:12:22.459 : echo: +7.37750 +7.26750 +7.87000 11:12:22.459 : echo: +7.52000 +7.09500 +7.61750 11:12:22.459 : echo: Corrected Bed Topography: 11:12:22.475 : echo: +0.72500 +0.00000 +0.47000 11:12:22.475 : echo: +0.68500 +0.57500 +1.17750 11:12:22.475 : echo: +0.82750 +0.40250 +0.92500 11:12:22.475 : echo: Corrected Bed Topography in new coordinates: 11:12:22.475 : echo: +0.78083 +0.00000 +0.41417 11:12:22.491 : echo: +0.58083 +0.41500 +0.96166 11:12:22.491 : echo: +0.56333 +0.08250 +0.54916 11:12:22.491 : echo: Height from Bed to Nozzle 11:12:22.491 : echo: (+) above, or (-) below surface : 11:12:22.506 : echo: +0.18083 +0.96166 +0.54750 11:12:22.506 : echo: +0.38083 +0.54667 +0.00000 11:12:22.506 : echo: +0.39833 +0.87917 +0.41250 11:12:22.506 : echo: Bed Level Correction Matrix: 11:12:22.506 : echo: +1.000000 +0.000000 +0.000465 11:12:22.522 : echo: +0.000001 +0.999999 -0.001333 11:12:22.522 : echo: -0.000465 +0.001333 +0.999999 11:12:22.522 : echo: > AFTER apply_rotation_xyz > current_position[Z_AXIS]= 6.94250 11:12:22.522 : echo: <<< gcode_G29 11:12:22.538 : ok X:260.00 Y:259.99 Z:6.94 E:0.00 Count X: 260.00 Y:260.00 Z:6.72 11:12:22.538 : echo: X:260.00 Y:259.99 Z:6.94 E:0.00 Count X: 260.00 Y:260.00 Z:6.72 11:12:22.538 : ok
Edited 2 time(s). Last edit at 10/17/2015 05:13AM by davdino81.
|
Re: MarlinKimbra 4.2 (e precedenti) mi stampa sempre inclinato ! October 17, 2015 05:45AM |
Registered: 8 years ago Posts: 12 |
Ho fatto altri test e mi sono accorto di un possibile errore:
se faccio un g30 in un punto mi da un valore ad esempio un z di 10 se avvicino manualmente il piatto e rifaccio i g30 mi da una z di 12 , non dovrebbe diminuire ? non è la distanza in mm dal piatto rispetto al sensore ?
Forse devo solo cambiare un settaggio ma non saprei quale.
se faccio un g30 in un punto mi da un valore ad esempio un z di 10 se avvicino manualmente il piatto e rifaccio i g30 mi da una z di 12 , non dovrebbe diminuire ? non è la distanza in mm dal piatto rispetto al sensore ?
Forse devo solo cambiare un settaggio ma non saprei quale.
|
Re: MarlinKimbra 4.2 (e precedenti) mi stampa sempre inclinato ! October 17, 2015 05:46AM |
Registered: 8 years ago Posts: 12 |
Quote
MagoKimbra
Ecco lo sapevo!!!
Ricapitoliamo per vedere se ci siamo capiti... L'endstop Y è dietro?
Se invece è davanti verso di te è sbagliato che sia un Ymin ma deve essere un Ymax. Il mio consiglio è spostarlo dietro senza cambiare nulla. Inoltre rimetti false a inverter asse Y...
Ho fatto altri test e mi sono accorto di un possibile errore:
se faccio un g30 in un punto mi da un valore ad esempio un z di 10 se avvicino manualmente il piatto e rifaccio i g30 mi da una z di 12 , non dovrebbe diminuire ? non è la distanza in mm dal piatto rispetto al sensore ?
Forse devo solo cambiare un settaggio ma non saprei quale.
|
Re: MarlinKimbra 4.2 (e precedenti) mi stampa sempre inclinato ! October 17, 2015 07:02AM |
Registered: 8 years ago Posts: 12 |
Ho modificato il pullup di zmin e adesso G30 funziona bene però il problema è rimasto
//#define ENDSTOPPULLUPS #if DISABLED(ENDSTOPPULLUPS) // fine endstop settings: Individual pullups. will be ignored if ENDSTOPPULLUPS is defined #define ENDSTOPPULLUP_XMIN #define ENDSTOPPULLUP_YMIN //#define ENDSTOPPULLUP_ZMIN #define ENDSTOPPULLUP_Z2MIN #define ENDSTOPPULLUP_XMAX #define ENDSTOPPULLUP_YMAX #define ENDSTOPPULLUP_ZMAX #define ENDSTOPPULLUP_Z2MAX #define ENDSTOPPULLUP_ZPROBE #define ENDSTOPPULLUP_EMIN #endif /*******
|
Re: MarlinKimbra 4.2 (e precedenti) mi stampa sempre inclinato ! October 31, 2015 04:46AM |
Registered: 10 years ago Posts: 535 |
Ho anch'io lo stesso problema!!
allego una foto di una stampa su un file per bed leveling
come si puo vedere il quadrato in alto a sinistra è quello ok, poi la stampa si schiaccia sempre piu procedendo verso destra e verso il basso!
I miei endstop x ed y sono a sinistra e dietro guardando la stampante che è una corexy
questo il mio config.core
In questo modo è tutto ok, credo che sia ovviamente un problema firmware che non riesco a capire!
uso un Pibot e la versione 4.2 stable di marlinkimbra!!
tra le altre cose effettuando un Zrepeatibility test (dopo aver settato il motore in z ad 1/8) mi da il seguente risultato
Edited 2 time(s). Last edit at 10/31/2015 06:40AM by mdcompositi.
allego una foto di una stampa su un file per bed leveling
come si puo vedere il quadrato in alto a sinistra è quello ok, poi la stampa si schiaccia sempre piu procedendo verso destra e verso il basso!
I miei endstop x ed y sono a sinistra e dietro guardando la stampante che è una corexy
questo il mio config.core
// coarse Endstop Settings
//#define ENDSTOPPULLUPS // Comment this out (using // at the start of the line) to disable the endstop pullup resistors
#ifndef ENDSTOPPULLUPS
// fine endstop settings: Individual pullups. will be ignored if ENDSTOPPULLUPS is defined
#define ENDSTOPPULLUP_XMAX
#define ENDSTOPPULLUP_YMAX
#define ENDSTOPPULLUP_ZMAX
#define ENDSTOPPULLUP_XMIN
#define ENDSTOPPULLUP_YMIN
//#define ENDSTOPPULLUP_ZMIN
//#define ENDSTOPPULLUP_ZPROBE
#define ENDSTOPPULLUP_EMIN
#endif
// Mechanical endstop with COM to ground and NC to Signal uses "false" here (most common setup).
#define X_MIN_ENDSTOP_LOGIC false // set to true to invert the logic of the endstop.
#define Y_MIN_ENDSTOP_LOGIC false // set to true to invert the logic of the endstop.
#define Z_MIN_ENDSTOP_LOGIC false // set to true to invert the logic of the endstop.
#define E_MIN_ENDSTOP_LOGIC false // set to true to invert the logic of the endstop.
#define X_MAX_ENDSTOP_LOGIC false // set to true to invert the logic of the endstop.
#define Y_MAX_ENDSTOP_LOGIC false // set to true to invert the logic of the endstop.
#define Z_MAX_ENDSTOP_LOGIC false // set to true to invert the logic of the endstop.
#define Z_PROBE_ENDSTOP_LOGIC false // set to true to invert the logic of the endstop.
// ENDSTOP SETTINGS:
// Sets direction of endstop when homing; 1=MAX, -1=MIN
#define X_HOME_DIR -1
#define Y_HOME_DIR -1
#define Z_HOME_DIR -1
#define E_HOME_DIR -1
#define min_software_endstops true // If true, axis won't move to coordinates less than HOME_POS.
#define max_software_endstops true // If true, axis won't move to coordinates greater than the defined lengths below.
// For Inverting Stepper Enable Pins (Active Low) use 0, Non Inverting (Active High) use 1
#define X_ENABLE_ON 0
#define Y_ENABLE_ON 0
#define Z_ENABLE_ON 0
#define E_ENABLE_ON 0 // For all extruder
// Disables axis when it's not being used.
#define DISABLE_X false
#define DISABLE_Y false
#define DISABLE_Z false
#define DISABLE_E false // For all extruder
#define DISABLE_INACTIVE_EXTRUDER false //disable only inactive extruder and keep active extruder enabled
// Invert the stepper direction. Change (or reverse the motor connector) if an axis goes the wrong way.
#define INVERT_X_DIR false
#define INVERT_Y_DIR false
#define INVERT_Z_DIR false
#define INVERT_E0_DIR false
#define INVERT_E1_DIR false
#define INVERT_E2_DIR false
#define INVERT_E3_DIR false
// Travel limits after homing (units are in mm)
#define X_MAX_POS 270
#define X_MIN_POS 0
#define Y_MAX_POS 240
#define Y_MIN_POS 0
#define Z_MAX_POS 180
#define Z_MIN_POS 0
#define E_MIN_POS 0
//=====================================================================================
//============================= Bed Manual or Auto Leveling ===========================
//=====================================================================================
// set the rectangle in which to probe in manual or automatic
#define LEFT_PROBE_BED_POSITION 20
#define RIGHT_PROBE_BED_POSITION 220
#define FRONT_PROBE_BED_POSITION 20
#define BACK_PROBE_BED_POSITION 220
#define XY_TRAVEL_SPEED 10000 // X and Y axis travel speed between probes, in mm/min
//If you have enabled the Auto Bed Levelling and are using the same Z Probe for Z Homing,
//it is highly recommended you let this Z_SAFE_HOMING enabled!!!
//#define Z_SAFE_HOMING
#ifdef Z_SAFE_HOMING
#define Z_SAFE_HOMING_X_POINT (X_MAX_LENGTH/2) // X point for Z homing when homing all axis (G28) or homing Z
#define Z_SAFE_HOMING_Y_POINT (Y_MAX_LENGTH/2) // Y point for Z homing when homing all axis (G28) or homing Z
#endif
#define ENABLE_AUTO_BED_LEVELING // Delete the comment to enable (ABL)
#define Z_PROBE_REPEATABILITY_TEST // Delete the comment to enable
#ifdef ENABLE_AUTO_BED_LEVELING
// There are 2 different ways to specify probing locations
//
// - "grid" mode
// Probe several points in a rectangular grid.
// You specify the rectangle and the density of sample points.
// This mode is preferred because there are more measurements.
//
// - "3-point" mode
// Probe 3 arbitrary points on the bed (that aren't colinear)
// You specify the XY coordinates of all 3 points.
// Enable this to sample the bed in a grid (least squares solution)
// Note: this feature generates 10KB extra code size
#define AUTO_BED_LEVELING_GRID
#ifdef AUTO_BED_LEVELING_GRID
#define MIN_PROBE_EDGE 10 // The probe square sides can be no smaller than this
// Set the number of grid points per dimension
// You probably don't need more than 3 (squared=9)
#define AUTO_BED_LEVELING_GRID_POINTS 2
#else // not AUTO_BED_LEVELING_GRID
// Arbitrary points to probe. A simple cross-product
// is used to estimate the plane of the bed.
#define ABL_PROBE_PT_1_X 35
#define ABL_PROBE_PT_1_Y 250
#define ABL_PROBE_PT_2_X 35
#define ABL_PROBE_PT_2_Y 35
#define ABL_PROBE_PT_3_X 250
#define ABL_PROBE_PT_3_Y 35
#endif // AUTO_BED_LEVELING_GRID
// Offsets to the probe relative to the extruder tip (Hotend - Probe)
// X and Y offsets MUST be INTEGERS
#define X_PROBE_OFFSET_FROM_EXTRUDER 0 // Probe on: -left +right
#define Y_PROBE_OFFSET_FROM_EXTRUDER 0 // Probe on: -front +behind
#define Z_PROBE_OFFSET_FROM_EXTRUDER -3.3
// -below (always!)
#define Z_RAISE_BEFORE_HOMING 10 // (in mm) Raise Z before homing (G28) for Probe Clearance.
// Be sure you have this distance over your Z_MAX_POS in case
#define Z_RAISE_BEFORE_PROBING 10 // much the extruder will be raised before travelling to the first probing point.
#define Z_RAISE_BETWEEN_PROBINGS 10 // much the extruder will be raised when travelling from between next probing points
#define Z_RAISE_AFTER_PROBING 5 //How much the extruder will be raised after the last probing point.
//#define Z_PROBE_SLED // turn on if you have a z-probe mounted on a sled like those designed by Charles Bell
//#define SLED_DOCKING_OFFSET 5 // the extra distance the X axis must travel to pick up the sled. 0 should be fine but you can push it further if you'd like.
//If defined, the Probe servo will be turned on only during movement and then turned off to avoid jerk
//The value is the delay to turn the servo off after powered on - depends on the servo speed; 300ms is good value, but you can try lower it.
//You MUST HAVE the SERVO ENDSTOPS defined to use here a value higher than zero otherwise your code will not compile.
#define PROBE_SERVO_DEACTIVATION_DELAY 300
// Support for a dedicated Z PROBE endstop separate from the Z MIN endstop.
// If you would like to use both a Z PROBE and a Z MIN endstop together or just a Z PROBE with a custom pin, uncomment #define Z_PROBE_ENDSTOP and read the instructions below.
// If you want to still use the Z min endstop for homing, disable Z_SAFE_HOMING above. Eg; to park the head outside the bed area when homing with G28.
// WARNING: The Z MIN endstop will need to set properly as it would without a Z PROBE to prevent head crashes and premature stopping during a print.
// To use a separte Z PROBE endstop, you must have a Z_PROBE_PIN defined in the pins.h file for your control board.
// If you are using a servo based Z PROBE, you will need to enable NUM_SERVOS, SERVO_ENDSTOPS and SERVO_ENDSTOPS_ANGLES in the R/C Servo below.
// WARNING: Setting the wrong pin may have unexpected and potentially disastrous outcomes. Use with caution and do your homework.
//#define Z_PROBE_ENDSTOP
#endif // ENABLE_AUTO_BED_LEVELING
Questo è invece quello che ottengo con G29 V4< 09:39:39: : N5170 G29 V4 *67 < 09:39:39: : G29 Auto Bed Leveling < 09:40:05: : Eqn coefficients: a: -0.00246249 b: 0.00003750 d: 3.42474865 < 09:40:05: : Mean of sampled points: 3.13374996 < 09:40:05: : Bed Height Topography: < 09:40:05: : +-----------+ < 09:40:05: : |...Back....| < 09:40:05: : |Left..Right| < 09:40:05: : |...Front...| < 09:40:05: : +-----------+ < 09:40:05: : +0.24875 -0.24125 < 09:40:05: : +0.24375 -0.25125 < 09:40:05: : planeNormal x: 0.002462 y: -0.000038 z: 1.000000 < 09:40:05: : Bed Level Correction Matrix: < 09:40:05: : +0.999997 +0.000000 -0.002462 < 09:40:05: : +0.000000 +1.000000 +0.000037 < 09:40:05: : +0.002462 -0.000038 +0.999997all'nizio credevo fosse un problema legato alla mancanza di planarità in z ma ho effettuato diverse prove anche senza sensore con il classico endstop su z e calibrando il piatto col foglio
In questo modo è tutto ok, credo che sia ovviamente un problema firmware che non riesco a capire!
uso un Pibot e la versione 4.2 stable di marlinkimbra!!
tra le altre cose effettuando un Zrepeatibility test (dopo aver settato il motore in z ad 1/8) mi da il seguente risultato
< 09:54:02: : M49 Z-Probe Repeatability test < 09:55:05: Mean: 3.212750 < 09:55:05: Standard Deviation: 0.002358Resto in attesa di un riscontro da parte del mago o di qualcuno che magari ha avuto loo stesso problema e lo ha risolto
Edited 2 time(s). Last edit at 10/31/2015 06:40AM by mdcompositi.
|
Re: MarlinKimbra 4.2 (e precedenti) mi stampa sempre inclinato ! November 01, 2015 08:00AM |
Registered: 8 years ago Posts: 12 |
|
Re: MarlinKimbra 4.2 (e precedenti) mi stampa sempre inclinato ! November 01, 2015 02:29PM |
Registered: 10 years ago Posts: 535 |
Ora un Pibot ma ho provato anche con un sensore induttivo e mi succedeva la stessa cosa!Quote
davdino81
Che sensore hai?
Per cui pensavo che fosse un problema di natura meccanica, magari una mancanza di collinearità che in fase di probing mi faceva perdere qualche centesimo da un lato
Ora però dopo vari aggiustamenti posso dire con sicurezza che il discorso di difetto meccanico è escluso!
Credo sia proprio un problema di firmware, per questo aspetto che magokimbra dica la sua
Tu invece hai trovato una soluzione?magari hai qualche consiglio?
|
Re: MarlinKimbra 4.2 (e precedenti) mi stampa sempre inclinato ! November 01, 2015 03:22PM |
Registered: 10 years ago Posts: 6,409 |
Sto passando un periodo un po incasinato per lavoro e altre cose cercate di capirmi se non riesco a star dietro a tutti...
L'origine degli assi cartesiani è questo:
Se guardiamo solo il piano X Y è questo:
Ok ci siamo...
Quindi in una core XY lo zero è davanti a sinistra... In una Cartesiana vedi prusa è X a sinistra e il carrello Y dietro in modo che il nozzle si trovi davanti...
Non è complicato....
Quindi mdcompositi che scrivi: I miei endstop x ed y sono a sinistra e dietro guardando la stampante che è una corexy
No è sbagliato l'endstop y deve essere davanti... altrimenti hai il piano y rovesciato e quindi ecco perché la matrice del autobed level viene specchiata...
Fatemi sapere....
COMPRA ITALIANO - sostieni le nostre aziende - sostieni la nostra gente - sostieni il tuo popolo - sosterrai te stesso.
Alberto C. felice possessore di una Kossel K2
My Blog - My Thingiverse
L'origine degli assi cartesiani è questo:

Se guardiamo solo il piano X Y è questo:

Ok ci siamo...
Quindi in una core XY lo zero è davanti a sinistra... In una Cartesiana vedi prusa è X a sinistra e il carrello Y dietro in modo che il nozzle si trovi davanti...
Non è complicato....
Quindi mdcompositi che scrivi: I miei endstop x ed y sono a sinistra e dietro guardando la stampante che è una corexy
No è sbagliato l'endstop y deve essere davanti... altrimenti hai il piano y rovesciato e quindi ecco perché la matrice del autobed level viene specchiata...
Fatemi sapere....
COMPRA ITALIANO - sostieni le nostre aziende - sostieni la nostra gente - sostieni il tuo popolo - sosterrai te stesso.
Alberto C. felice possessore di una Kossel K2
My Blog - My Thingiverse
|
Re: MarlinKimbra 4.2 (e precedenti) mi stampa sempre inclinato ! November 02, 2015 03:44AM |
Registered: 10 years ago Posts: 535 |
OkQuote
MagoKimbra
Sto passando un periodo un po incasinato per lavoro e altre cose cercate di capirmi se non riesco a star dietro a tutti...
L'origine degli assi cartesiani è questo:
Se guardiamo solo il piano X Y è questo:
Ok ci siamo...
Quindi in una core XY lo zero è davanti a sinistra... In una Cartesiana vedi prusa è X a sinistra e il carrello Y dietro in modo che il nozzle si trovi davanti...
Non è complicato....
Quindi mdcompositi che scrivi: I miei endstop x ed y sono a sinistra e dietro guardando la stampante che è una corexy
No è sbagliato l'endstop y deve essere davanti... altrimenti hai il piano y rovesciato e quindi ecco perché la matrice del autobed level viene specchiata...
Fatemi sapere....
anche il mio è un caso di stampa specchiata!!
è che il mio errore è stato fin dall'inizio il non considerare il fatto che bisognava rispettare la convenzione matematica della definizione di coordinate cartesiane!!

per cui davo io arbitrariamente le direzioni degli assi x ed y!
solo che però adesso andando a mettere tutto nel giusto ordine col nozzle avanti a sinistra mi succede che dopo aver provato tutte le varie combinazioni non riesco proprio a far funzionare l'endstop x; quello y va!
non riesco a capire perchè, ho anche giostrato con le logiche di x ed y ma niente!!
nella corexy i due motori girano entrambi in senso orario per andare nella direzione delle x positive mentre uno va nel senso orario(quello di sx ) e l'altro in antiorario per le y positive!
la mia configurazione fw è la seguente
In pratica quando do la home da repetier, il carrello va nella direzione giusta verso l'endstop x , ci tocca ma l'endstop non si chiude( non funziona)!
//=========================================================================== //=============================Mechanical Settings=========================== //=========================================================================== // coarse Endstop Settings //#define ENDSTOPPULLUPS // Comment this out (using // at the start of the line) to disable the endstop pullup resistors #ifndef ENDSTOPPULLUPS // fine endstop settings: Individual pullups. will be ignored if ENDSTOPPULLUPS is defined #define ENDSTOPPULLUP_XMAX #define ENDSTOPPULLUP_YMAX #define ENDSTOPPULLUP_ZMAX #define ENDSTOPPULLUP_XMIN #define ENDSTOPPULLUP_YMIN //#define ENDSTOPPULLUP_ZMIN //#define ENDSTOPPULLUP_ZPROBE #define ENDSTOPPULLUP_EMIN #endif // Mechanical endstop with COM to ground and NC to Signal uses "false" here (most common setup). #define X_MIN_ENDSTOP_LOGIC true // set to true to invert the logic of the endstop. #define Y_MIN_ENDSTOP_LOGIC false // set to true to invert the logic of the endstop. #define Z_MIN_ENDSTOP_LOGIC false // set to true to invert the logic of the endstop. #define E_MIN_ENDSTOP_LOGIC false // set to true to invert the logic of the endstop. #define X_MAX_ENDSTOP_LOGIC false // set to true to invert the logic of the endstop. #define Y_MAX_ENDSTOP_LOGIC false // set to true to invert the logic of the endstop. #define Z_MAX_ENDSTOP_LOGIC false // set to true to invert the logic of the endstop. #define Z_PROBE_ENDSTOP_LOGIC false // set to true to invert the logic of the endstop. // ENDSTOP SETTINGS: // Sets direction of endstop when homing; 1=MAX, -1=MIN #define X_HOME_DIR -1 #define Y_HOME_DIR -1 #define Z_HOME_DIR -1 #define E_HOME_DIR -1 #define min_software_endstops true // If true, axis won't move to coordinates less than HOME_POS. #define max_software_endstops true // If true, axis won't move to coordinates greater than the defined lengths below. // For Inverting Stepper Enable Pins (Active Low) use 0, Non Inverting (Active High) use 1 #define X_ENABLE_ON 0 #define Y_ENABLE_ON 0 #define Z_ENABLE_ON 0 #define E_ENABLE_ON 0 // For all extruder // Disables axis when it's not being used. #define DISABLE_X false #define DISABLE_Y false #define DISABLE_Z false #define DISABLE_E false // For all extruder #define DISABLE_INACTIVE_EXTRUDER false //disable only inactive extruder and keep active extruder enabled // Invert the stepper direction. Change (or reverse the motor connector) if an axis goes the wrong way. #define INVERT_X_DIR true #define INVERT_Y_DIR true #define INVERT_Z_DIR false #define INVERT_E0_DIR false #define INVERT_E1_DIR false #define INVERT_E2_DIR false #define INVERT_E3_DIR false // Travel limits after homing (units are in mm) #define X_MAX_POS 270 #define X_MIN_POS 0 #define Y_MAX_POS 240 #define Y_MIN_POS 0 #define Z_MAX_POS 180 #define Z_MIN_POS 0 #define E_MIN_POS 0
Edited 1 time(s). Last edit at 11/02/2015 03:53AM by mdcompositi.
|
Re: MarlinKimbra 4.2 (e precedenti) mi stampa sempre inclinato ! November 02, 2015 04:37AM |
Registered: 10 years ago Posts: 6,409 |
Perché hai questo??
COMPRA ITALIANO - sostieni le nostre aziende - sostieni la nostra gente - sostieni il tuo popolo - sosterrai te stesso.
Alberto C. felice possessore di una Kossel K2
My Blog - My Thingiverse
#define X_MIN_ENDSTOP_LOGIC true
COMPRA ITALIANO - sostieni le nostre aziende - sostieni la nostra gente - sostieni il tuo popolo - sosterrai te stesso.
Alberto C. felice possessore di una Kossel K2
My Blog - My Thingiverse
|
Re: MarlinKimbra 4.2 (e precedenti) mi stampa sempre inclinato ! November 02, 2015 04:45AM |
Registered: 10 years ago Posts: 535 |
se metto true quando faccio la home non la prende, va in avanti di un po e basta e invece non va piu indietro verso le x negative!!Quote
MagoKimbra
Perché hai questo??
#define X_MIN_ENDSTOP_LOGIC true
ho fatto anche questo
#define X_HOME_DIR 1lo stesso nn funziona!!
Edited 2 time(s). Last edit at 11/02/2015 04:52AM by mdcompositi.
|
Re: MarlinKimbra 4.2 (e precedenti) mi stampa sempre inclinato ! November 02, 2015 05:32AM |
Registered: 10 years ago Posts: 6,409 |
Lascia perdere di fare la home... Testa gli endstop con M119 tasto non premuto e tasto premuto NOT TRIGGERED o TRIGGERED
COMPRA ITALIANO - sostieni le nostre aziende - sostieni la nostra gente - sostieni il tuo popolo - sosterrai te stesso.
Alberto C. felice possessore di una Kossel K2
My Blog - My Thingiverse
COMPRA ITALIANO - sostieni le nostre aziende - sostieni la nostra gente - sostieni il tuo popolo - sosterrai te stesso.
Alberto C. felice possessore di una Kossel K2
My Blog - My Thingiverse
|
Re: MarlinKimbra 4.2 (e precedenti) mi stampa sempre inclinato ! November 02, 2015 05:36AM |
Registered: 10 years ago Posts: 535 |
|
Re: MarlinKimbra 4.2 (e precedenti) mi stampa sempre inclinato ! November 02, 2015 05:42AM |
Registered: 10 years ago Posts: 6,409 |
E allora è un problema dell'endstop hai sempre un contatto chiuso a massa!!!! Se hai messo la logica a false altrimenti non chiude mai a massa se hai messo la logica a true...
COMPRA ITALIANO - sostieni le nostre aziende - sostieni la nostra gente - sostieni il tuo popolo - sosterrai te stesso.
Alberto C. felice possessore di una Kossel K2
My Blog - My Thingiverse
COMPRA ITALIANO - sostieni le nostre aziende - sostieni la nostra gente - sostieni il tuo popolo - sosterrai te stesso.
Alberto C. felice possessore di una Kossel K2
My Blog - My Thingiverse
|
Re: MarlinKimbra 4.2 (e precedenti) mi stampa sempre inclinato ! November 02, 2015 06:15AM |
Registered: 10 years ago Posts: 535 |
ho cambiato l'endstop con uno nuovo!!Quote
MagoKimbra
E allora è un problema dell'endstop hai sempre un contatto chiuso a massa!!!! Se hai messo la logica a false altrimenti non chiude mai a massa se hai messo la logica a true...
il problema persiste!!allora è alla ramps il problema??
ovviamente ho messo la logica a false
Edited 1 time(s). Last edit at 11/02/2015 06:32AM by mdcompositi.
|
Re: MarlinKimbra 4.2 (e precedenti) mi stampa sempre inclinato ! November 02, 2015 07:33AM |
Registered: 10 years ago Posts: 6,409 |
Arduino secondo me... Sposta x min su xmax invertendo i pin...
COMPRA ITALIANO - sostieni le nostre aziende - sostieni la nostra gente - sostieni il tuo popolo - sosterrai te stesso.
Alberto C. felice possessore di una Kossel K2
My Blog - My Thingiverse
COMPRA ITALIANO - sostieni le nostre aziende - sostieni la nostra gente - sostieni il tuo popolo - sosterrai te stesso.
Alberto C. felice possessore di una Kossel K2
My Blog - My Thingiverse
|
Re: MarlinKimbra 4.2 (e precedenti) mi stampa sempre inclinato ! November 02, 2015 08:04AM |
Registered: 10 years ago Posts: 535 |
avevo un'altro arduino di scorta e per velocizzare la cosa l'ho sostituito!Quote
MagoKimbra
Arduino secondo me... Sposta x min su xmax invertendo i pin...
il problema persiste!
a meno che anche quest'altro arduino che ho messo è difettoso!
come si invertono i pin?
va bene così?
/**************************************************************************************** * 33 * RAMPS 1.3 / 1.4 * RAMPS_13_EFB (Extruder, Fan, Bed) ****************************************************************************************/ #if MB(RAMPS_13_EF#define KNOWN_BOARD 1 #if !defined(__AVR_ATmega1280__) && !defined(__AVR_ATmega2560__) #error Oops! Make sure you have 'Arduino Mega' selected from the 'Tools -> Boards' menu. #endif #define LARGE_FLASH true //X axis pins #define ORIG_X_STEP_PIN 54 #define ORIG_X_DIR_PIN 55 #define ORIG_X_ENABLE_PIN 38 #define X_MIN_PIN 2 #define X_MAX_PIN 3
Edited 1 time(s). Last edit at 11/02/2015 08:19AM by mdcompositi.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Sorry, only registered users may post in this forum.