Home
>
RepRap User Groups
>
Europe
>
Italy RepRap User Group - Gruppo RepRap Italia
>
GCODE, Software e Firmware
>
Topic
Mkduo 4.4.0 driver TB6600 DEFAULT_AXIS_STEPS_PER_UNIT
Posted by atomino
|
Mkduo 4.4.0 driver TB6600 DEFAULT_AXIS_STEPS_PER_UNIT March 23, 2020 08:09AM |
Registered: 5 years ago Posts: 96 |
Buongiorno,
sto modificando la mia vecchia 3Drag dove ho ampliato
l'asse Y a 400mm, Ramps 1.4 driver TB6600 , Bltouch
e Dav2, E3D_V6
Ma non mi tornano gli spostamenti, questi i parametri
DEFAULT_AXIS_STEPS_PER_UNIT {160,160,3200}
Motore 200 step x giro, 32 usteps e puleggia T2 20 denti
(200 * 32 ) / ( 20 * 2 ) = 160.
...cosa sbaglio ?
un grazie in anticipo
sto modificando la mia vecchia 3Drag dove ho ampliato
l'asse Y a 400mm, Ramps 1.4 driver TB6600 , Bltouch
e Dav2, E3D_V6
Ma non mi tornano gli spostamenti, questi i parametri
DEFAULT_AXIS_STEPS_PER_UNIT {160,160,3200}
Motore 200 step x giro, 32 usteps e puleggia T2 20 denti
(200 * 32 ) / ( 20 * 2 ) = 160.
...cosa sbaglio ?
un grazie in anticipo
|
Re: Mkduo 4.4.0 driver TB6600 DEFAULT_AXIS_STEPS_PER_UNIT March 23, 2020 09:15AM |
Registered: 10 years ago Posts: 6,409 |
Non ti tornano gli spostamenti cosa vuol dire?? Ti sposti di 100 mm e ne fa di più o di meno???
Sei sicuro che stai a 160 Step per mm hai controllato i valori che riporta con M503?
COMPRA ITALIANO - sostieni le nostre aziende - sostieni la nostra gente - sostieni il tuo popolo - sosterrai te stesso.
Alberto C. felice possessore di una Kossel K2
My Blog - My Thingiverse
Sei sicuro che stai a 160 Step per mm hai controllato i valori che riporta con M503?
COMPRA ITALIANO - sostieni le nostre aziende - sostieni la nostra gente - sostieni il tuo popolo - sosterrai te stesso.
Alberto C. felice possessore di una Kossel K2
My Blog - My Thingiverse
|
Re: Mkduo 4.4.0 driver TB6600 DEFAULT_AXIS_STEPS_PER_UNIT March 23, 2020 02:50PM |
Registered: 5 years ago Posts: 96 |
Ho dato un M502 ed un M500 ed e' andato a posto.
ho un po' di domande :
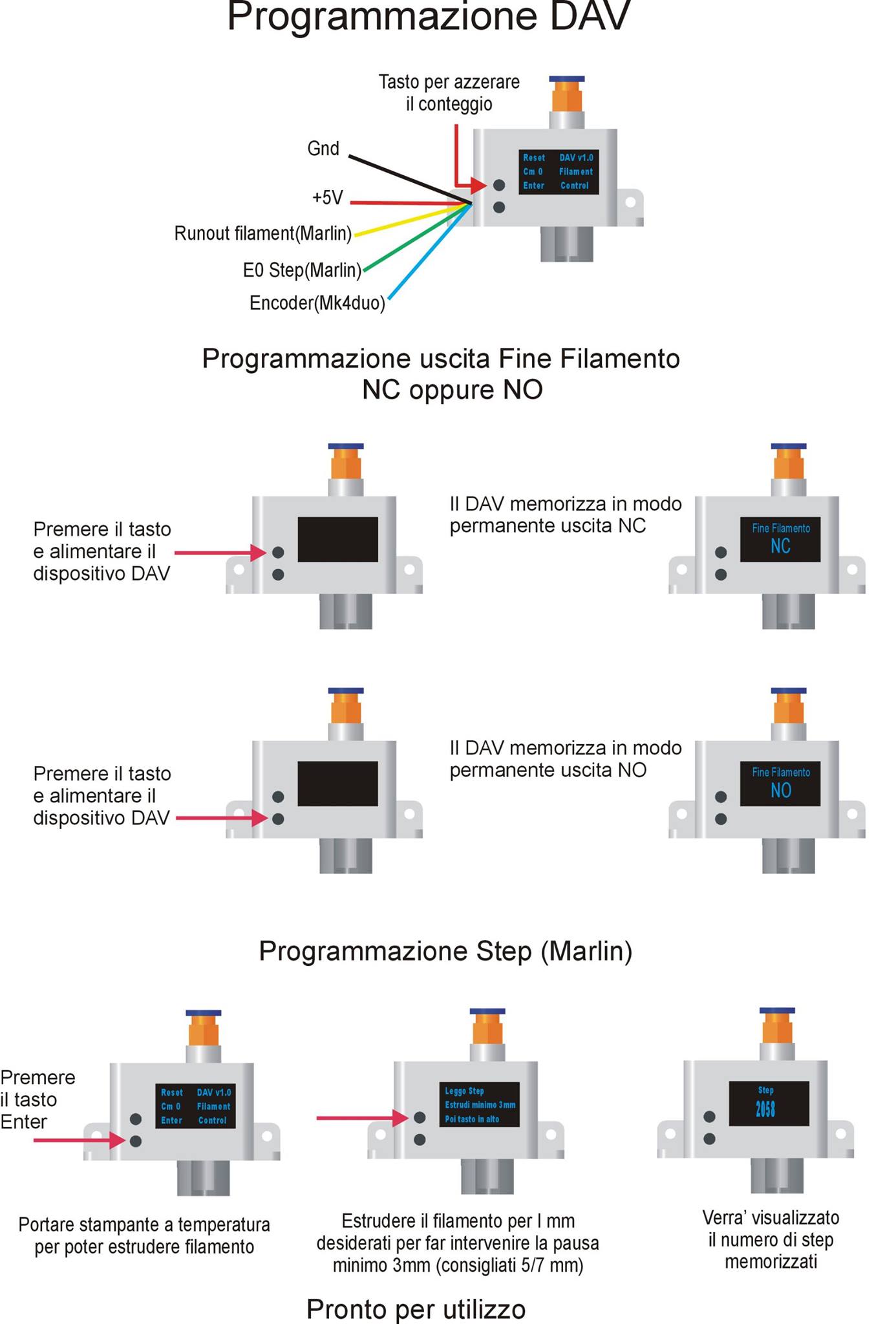
1- DAV2 dove vado a collegare il filo blu e quale' la variabile per definire il pin ?
sono giuste le definizioni per il DAV2
//#define FILAMENT_LCD_DISPLAY
#define FILAMENT_RUNOUT_SENSOR
#define FILAMENT_RUNOUT_DAV_SYSTEM
//#define EXTRUDER_ENCODER_CONTROL
#define FILAMENT_RUNOUT_DISTANCE_MM 0
#define FILAMENT_RUNOUT_THRESHOLD 5
#define FILAMENT_RUNOUT_SCRIPT "M600"
2- Home X
Quando vado a fare l'home ogni tanto capita che si ferma di raggiungere l'endstop
e mi compare sul Repetier Host la message box Pause Continue Printing
a cosa puo' essere associato ?
ho un po' di domande :
1- DAV2 dove vado a collegare il filo blu e quale' la variabile per definire il pin ?
sono giuste le definizioni per il DAV2
//#define FILAMENT_LCD_DISPLAY
#define FILAMENT_RUNOUT_SENSOR
#define FILAMENT_RUNOUT_DAV_SYSTEM
//#define EXTRUDER_ENCODER_CONTROL
#define FILAMENT_RUNOUT_DISTANCE_MM 0
#define FILAMENT_RUNOUT_THRESHOLD 5
#define FILAMENT_RUNOUT_SCRIPT "M600"
2- Home X
Quando vado a fare l'home ogni tanto capita che si ferma di raggiungere l'endstop
e mi compare sul Repetier Host la message box Pause Continue Printing
a cosa puo' essere associato ?
|
Re: Mkduo 4.4.0 driver TB6600 DEFAULT_AXIS_STEPS_PER_UNIT March 23, 2020 03:24PM |
Registered: 10 years ago Posts: 6,409 |
DAV2 cos'é ???
COMPRA ITALIANO - sostieni le nostre aziende - sostieni la nostra gente - sostieni il tuo popolo - sosterrai te stesso.
Alberto C. felice possessore di una Kossel K2
My Blog - My Thingiverse
COMPRA ITALIANO - sostieni le nostre aziende - sostieni la nostra gente - sostieni il tuo popolo - sosterrai te stesso.
Alberto C. felice possessore di una Kossel K2
My Blog - My Thingiverse
|
Re: Mkduo 4.4.0 driver TB6600 DEFAULT_AXIS_STEPS_PER_UNIT March 23, 2020 03:41PM |
Registered: 5 years ago Posts: 96 |
|
Re: Mkduo 4.4.0 driver TB6600 DEFAULT_AXIS_STEPS_PER_UNIT March 24, 2020 03:46AM |
Registered: 10 years ago Posts: 3,268 |
hai visto questa guida del mago?
[www.marlinkimbra.it]
Alessandro
Prusa I3 Rework molto modificata - Taurino Classic - Ramps 1.4 - Driver DVR8825 - Titan Extruder e Hotend E3D V6 - Bltouch originale - Firmware MarlinKimbra - Cura - Repetier Host
[www.marlinkimbra.it]
Alessandro
Prusa I3 Rework molto modificata - Taurino Classic - Ramps 1.4 - Driver DVR8825 - Titan Extruder e Hotend E3D V6 - Bltouch originale - Firmware MarlinKimbra - Cura - Repetier Host
|
Re: Mkduo 4.4.0 driver TB6600 DEFAULT_AXIS_STEPS_PER_UNIT March 24, 2020 08:06AM |
Registered: 5 years ago Posts: 96 |
|
Re: Mkduo 4.4.0 driver TB6600 DEFAULT_AXIS_STEPS_PER_UNIT March 24, 2020 06:46PM |
Registered: 10 years ago Posts: 6,409 |
Si per la prima, ma il DAV originale, non so se la versione 2.0 fa la stessa cosa..
Il DAV originale aveva due piedini pin uno serviva per dare gli impulsi dello step al sensore e l'altro serviva per dire al fw filamento bloccato o inesistente...
Questo quanti pin ha??
La seconda assolutamente no quello è quante volte deve leggere errore prima di dare errore.. I pin stanno dentro configuration_pin
#if ENABLED(FILAMENT_RUNOUT_SENSOR)
#define FIL_RUNOUT_0_PIN NoPin
#define FIL_RUNOUT_1_PIN NoPin
#define FIL_RUNOUT_2_PIN NoPin
#define FIL_RUNOUT_3_PIN NoPin
#define FIL_RUNOUT_4_PIN NoPin
#define FIL_RUNOUT_5_PIN NoPin
#define FIL_RUNOUT_DAV_PIN NoPin
#endif
FIL_RUNOUT_DAV_PIN questo è il pin che serve a dire al sensore quanti step dovrebbe fare il motore e lui si deve regolare di conseguenza.
FIL_RUNOUT_0_PIN questo è il pin di uscita che dice al fw filamento finito o bloccato.
COMPRA ITALIANO - sostieni le nostre aziende - sostieni la nostra gente - sostieni il tuo popolo - sosterrai te stesso.
Alberto C. felice possessore di una Kossel K2
My Blog - My Thingiverse
Il DAV originale aveva due piedini pin uno serviva per dare gli impulsi dello step al sensore e l'altro serviva per dire al fw filamento bloccato o inesistente...
Questo quanti pin ha??
La seconda assolutamente no quello è quante volte deve leggere errore prima di dare errore.. I pin stanno dentro configuration_pin
#if ENABLED(FILAMENT_RUNOUT_SENSOR)
#define FIL_RUNOUT_0_PIN NoPin
#define FIL_RUNOUT_1_PIN NoPin
#define FIL_RUNOUT_2_PIN NoPin
#define FIL_RUNOUT_3_PIN NoPin
#define FIL_RUNOUT_4_PIN NoPin
#define FIL_RUNOUT_5_PIN NoPin
#define FIL_RUNOUT_DAV_PIN NoPin
#endif
FIL_RUNOUT_DAV_PIN questo è il pin che serve a dire al sensore quanti step dovrebbe fare il motore e lui si deve regolare di conseguenza.
FIL_RUNOUT_0_PIN questo è il pin di uscita che dice al fw filamento finito o bloccato.
Quote
atomino
Si, ma dalla 4.1.3 alla 4.4.0 ci sono
dei nuovi parametri :
FILAMENT_RUNOUT_DAV_SYSTEM ; questo si riferisce al Dav da me menzionato ?
FILAMENT_RUNOUT_THRESHOLD 5 ; questo e' l'ingresso n.5 del servo ?
COMPRA ITALIANO - sostieni le nostre aziende - sostieni la nostra gente - sostieni il tuo popolo - sosterrai te stesso.
Alberto C. felice possessore di una Kossel K2
My Blog - My Thingiverse
|
Re: Mkduo 4.4.0 driver TB6600 DEFAULT_AXIS_STEPS_PER_UNIT March 25, 2020 03:41AM |
Registered: 5 years ago Posts: 96 |
|
Re: Mkduo 4.4.0 driver TB6600 DEFAULT_AXIS_STEPS_PER_UNIT March 25, 2020 07:32AM |
Registered: 5 years ago Posts: 96 |
Sto impazzendo con il comando di Home su
12:26:02.407 : N45 G28 X0*106
12:26:02.593 : T:13.10 /0 @:0 B:13.10 /0 B@:0 F0:0
12:26:03.599 : T:13.10 /0 @:0 B:13.10 /0 B@:0 F0:0
12:26:03.916 : RequestPause: Homing Failed
12:26:03.916 : X:0.000 Y:0.000 Z:0.000 E:0.000
ho cambiato il sensore, ho cambiato la ramps 1.4, ho cambiato Arduino .
Altre volte si sposta di 25mm non raggiungero il sensore e si ferma
azzerando il contatore
12:30:16.139 : N16 G28 X0*108
12:30:16.618 : T:13.10 /0 @:0 B:13.10 /0 B@:0 F0:0
12:30:17.387 : X:0.000 Y:0.000 Z:0.000 E:0.000
12:30:17.387 : Count X:0 Y:0 Z:0
12:30:17.387 : ok
se non lo metto a posto non posso andare avanti con il resto...
12:26:02.407 : N45 G28 X0*106
12:26:02.593 : T:13.10 /0 @:0 B:13.10 /0 B@:0 F0:0
12:26:03.599 : T:13.10 /0 @:0 B:13.10 /0 B@:0 F0:0
12:26:03.916 : RequestPause: Homing Failed
12:26:03.916 : X:0.000 Y:0.000 Z:0.000 E:0.000
ho cambiato il sensore, ho cambiato la ramps 1.4, ho cambiato Arduino .
Altre volte si sposta di 25mm non raggiungero il sensore e si ferma
azzerando il contatore
12:30:16.139 : N16 G28 X0*108
12:30:16.618 : T:13.10 /0 @:0 B:13.10 /0 B@:0 F0:0
12:30:17.387 : X:0.000 Y:0.000 Z:0.000 E:0.000
12:30:17.387 : Count X:0 Y:0 Z:0
12:30:17.387 : ok
se non lo metto a posto non posso andare avanti con il resto...
|
Re: Mkduo 4.4.0 driver TB6600 DEFAULT_AXIS_STEPS_PER_UNIT March 25, 2020 07:52AM |
Registered: 10 years ago Posts: 6,409 |
Non mi risulta... Quindi fatti spiegare da chi te lo ha venduto come collegarlo.. Perché se non metti i due pin come ti ho scritto prima allora non devi settarlo come dav, ma come semplice encoder.
E mettere l'unico pin su FIL_RUNOUT_0_PIN
Edited 1 time(s). Last edit at 03/25/2020 07:53AM by MagoKimbra.
COMPRA ITALIANO - sostieni le nostre aziende - sostieni la nostra gente - sostieni il tuo popolo - sosterrai te stesso.
Alberto C. felice possessore di una Kossel K2
My Blog - My Thingiverse
E mettere l'unico pin su FIL_RUNOUT_0_PIN
Edited 1 time(s). Last edit at 03/25/2020 07:53AM by MagoKimbra.
COMPRA ITALIANO - sostieni le nostre aziende - sostieni la nostra gente - sostieni il tuo popolo - sosterrai te stesso.
Alberto C. felice possessore di una Kossel K2
My Blog - My Thingiverse
|
Re: Mkduo 4.4.0 driver TB6600 DEFAULT_AXIS_STEPS_PER_UNIT March 25, 2020 12:47PM |
Registered: 5 years ago Posts: 96 |
Qui il comando X home e' andato correttamente
17:40:34.529 : N16 G28 X0*108
17:40:34.587 : T:13.87 /0 @:0 B:13.87 /0 B@:0 F0:0
17:40:35.595 : T:13.10 /0 @:0 B:13.87 /0 B@:0 F0:0
17:40:36.090 : busy:processing
17:40:36.602 : T:13.10 /0 @:0 B:13.87 /0 B@:0 F0:0
17:40:37.611 : T:13.87 /0 @:0 B:13.87 /0 B@:0 F0:0
17:40:38.106 : busy:processing
17:40:38.278 : X:0.000 Y:0.000 Z:0.000 E:0.000
17:40:38.278 : Count X:0 Y:0 Z:0
17:40:38.279 : ok
17:40:38.279 : wait
L'ho spostata di 150 con 3 step da 50
17:40:46.465 : N17 G1 X50 F600*51
17:40:46.472 : ok
17:40:46.680 : T:12.31 /0 @:0 B:13.10 /0 B@:0 F0:0
17:40:47.478 : wait
17:40:47.687 : T:12.31 /0 @:0 B:13.10 /0 B@:0 F0:0
17:40:48.487 : wait
17:40:48.694 : T:12.31 /0 @:0 B:13.10 /0 B@:0 F0:0
17:40:49.494 : wait
17:40:49.703 : T:12.31 /0 @:0 B:13.10 /0 B@:0 F0:0
17:40:50.504 : wait
17:40:50.710 : T:12.31 /0 @:0 B:13.10 /0 B@:0 F0:0
17:40:51.509 : wait
17:40:51.720 : T:13.10 /0 @:0 B:13.10 /0 B@:0 F0:0
17:40:52.367 : N18 G1 X100 F600*8
17:40:52.374 : ok
17:40:52.727 : T:12.31 /0 @:0 B:13.10 /0 B@:0 F0:0
17:40:53.381 : wait
17:40:53.734 : T:12.31 /0 @:0 B:13.10 /0 B@:0 F0:0
17:40:54.387 : wait
17:40:54.742 : T:12.31 /0 @:0 B:13.10 /0 B@:0 F0:0
17:40:55.398 : wait
17:40:55.750 : T:12.31 /0 @:0 B:13.10 /0 B@:0 F0:0
17:40:56.405 : wait
17:40:56.758 : T:12.31 /0 @:0 B:13.10 /0 B@:0 F0:0
17:40:57.413 : wait
17:40:57.765 : T:12.31 /0 @:0 B:13.10 /0 B@:0 F0:0
17:40:58.420 : wait
17:40:58.775 : T:12.31 /0 @:0 B:13.10 /0 B@:0 F0:0
17:40:59.151 : N19 G1 X150 F600*12
17:40:59.157 : ok
17:40:59.781 : T:12.31 /0 @:0 B:13.10 /0 B@:0 F0:0
17:41:00.166 : wait
17:41:00.789 : T:12.31 /0 @:0 B:13.10 /0 B@:0 F0:0
17:41:01.173 : wait
17:41:01.798 : T:12.31 /0 @:0 B:13.10 /0 B@:0 F0:0
17:41:02.182 : wait
17:41:02.805 : T:12.31 /0 @:0 B:13.10 /0 B@:0 F0:0
17:41:03.190 : wait
17:41:03.813 : T:12.31 /0 @:0 B:13.10 /0 B@:0 F0:0
17:41:04.198 : wait
17:41:04.821 : T:12.31 /0 @:0 B:13.10 /0 B@:0 F0:0
17:41:05.204 : wait
17:41:05.828 : T:12.31 /0 @:0 B:13.10 /0 B@:0 F0:0
17:41:06.213 : wait
17:41:06.837 : T:12.31 /0 @:0 B:13.10 /0 B@:0 F0:0
17:41:07.220 : wait
17:41:07.480 : N20 G28 X0*105
17:41:07.845 : T:13.10 /0 @:0 B:13.87 /0 B@:0 F0:0
17:41:08.342 : busy:processing
17:41:08.854 : T:13.10 /0 @:0 B:13.87 /0 B@:0 F0:0
17:41:09.268 : N21 M539 P1*94
17:41:09.272 : RequestPause: Homing Failed
17:41:09.273 : X:0.000 Y:0.000 Z:0.000 E:0.000
17:41:09.278 : Count X:0 Y:0 Z:0
17:41:09.278 : ok
17:41:09.278 : wait
17:41:09.281 : echo:Unknown command: "M539 P1"
17:41:09.283 : ok
Qui sopra al comando di home e' tornata indietro di 10 e poi e' andata in errore !!!
17:40:34.529 : N16 G28 X0*108
17:40:34.587 : T:13.87 /0 @:0 B:13.87 /0 B@:0 F0:0
17:40:35.595 : T:13.10 /0 @:0 B:13.87 /0 B@:0 F0:0
17:40:36.090 : busy:processing
17:40:36.602 : T:13.10 /0 @:0 B:13.87 /0 B@:0 F0:0
17:40:37.611 : T:13.87 /0 @:0 B:13.87 /0 B@:0 F0:0
17:40:38.106 : busy:processing
17:40:38.278 : X:0.000 Y:0.000 Z:0.000 E:0.000
17:40:38.278 : Count X:0 Y:0 Z:0
17:40:38.279 : ok
17:40:38.279 : wait
L'ho spostata di 150 con 3 step da 50
17:40:46.465 : N17 G1 X50 F600*51
17:40:46.472 : ok
17:40:46.680 : T:12.31 /0 @:0 B:13.10 /0 B@:0 F0:0
17:40:47.478 : wait
17:40:47.687 : T:12.31 /0 @:0 B:13.10 /0 B@:0 F0:0
17:40:48.487 : wait
17:40:48.694 : T:12.31 /0 @:0 B:13.10 /0 B@:0 F0:0
17:40:49.494 : wait
17:40:49.703 : T:12.31 /0 @:0 B:13.10 /0 B@:0 F0:0
17:40:50.504 : wait
17:40:50.710 : T:12.31 /0 @:0 B:13.10 /0 B@:0 F0:0
17:40:51.509 : wait
17:40:51.720 : T:13.10 /0 @:0 B:13.10 /0 B@:0 F0:0
17:40:52.367 : N18 G1 X100 F600*8
17:40:52.374 : ok
17:40:52.727 : T:12.31 /0 @:0 B:13.10 /0 B@:0 F0:0
17:40:53.381 : wait
17:40:53.734 : T:12.31 /0 @:0 B:13.10 /0 B@:0 F0:0
17:40:54.387 : wait
17:40:54.742 : T:12.31 /0 @:0 B:13.10 /0 B@:0 F0:0
17:40:55.398 : wait
17:40:55.750 : T:12.31 /0 @:0 B:13.10 /0 B@:0 F0:0
17:40:56.405 : wait
17:40:56.758 : T:12.31 /0 @:0 B:13.10 /0 B@:0 F0:0
17:40:57.413 : wait
17:40:57.765 : T:12.31 /0 @:0 B:13.10 /0 B@:0 F0:0
17:40:58.420 : wait
17:40:58.775 : T:12.31 /0 @:0 B:13.10 /0 B@:0 F0:0
17:40:59.151 : N19 G1 X150 F600*12
17:40:59.157 : ok
17:40:59.781 : T:12.31 /0 @:0 B:13.10 /0 B@:0 F0:0
17:41:00.166 : wait
17:41:00.789 : T:12.31 /0 @:0 B:13.10 /0 B@:0 F0:0
17:41:01.173 : wait
17:41:01.798 : T:12.31 /0 @:0 B:13.10 /0 B@:0 F0:0
17:41:02.182 : wait
17:41:02.805 : T:12.31 /0 @:0 B:13.10 /0 B@:0 F0:0
17:41:03.190 : wait
17:41:03.813 : T:12.31 /0 @:0 B:13.10 /0 B@:0 F0:0
17:41:04.198 : wait
17:41:04.821 : T:12.31 /0 @:0 B:13.10 /0 B@:0 F0:0
17:41:05.204 : wait
17:41:05.828 : T:12.31 /0 @:0 B:13.10 /0 B@:0 F0:0
17:41:06.213 : wait
17:41:06.837 : T:12.31 /0 @:0 B:13.10 /0 B@:0 F0:0
17:41:07.220 : wait
17:41:07.480 : N20 G28 X0*105
17:41:07.845 : T:13.10 /0 @:0 B:13.87 /0 B@:0 F0:0
17:41:08.342 : busy:processing
17:41:08.854 : T:13.10 /0 @:0 B:13.87 /0 B@:0 F0:0
17:41:09.268 : N21 M539 P1*94
17:41:09.272 : RequestPause: Homing Failed
17:41:09.273 : X:0.000 Y:0.000 Z:0.000 E:0.000
17:41:09.278 : Count X:0 Y:0 Z:0
17:41:09.278 : ok
17:41:09.278 : wait
17:41:09.281 : echo:Unknown command: "M539 P1"
17:41:09.283 : ok
Qui sopra al comando di home e' tornata indietro di 10 e poi e' andata in errore !!!
|
Re: Mkduo 4.4.0 driver TB6600 DEFAULT_AXIS_STEPS_PER_UNIT March 25, 2020 01:02PM |
Registered: 5 years ago Posts: 96 |
Invece sulla home di Z con il Bltouch
17:50:21.678 : N22 G28 Z0*105
.....
17:52:32.787 : T:23.75 /0 @:0 B:13.87 /0 B@:0 F0:0
17:52:33.795 : T:23.75 /0 @:0 B:13.87 /0 B@:0 F0:0
17:52:34.330 : busy:processing
17:52:34.805 : T:23.23 /0 @:0 B:13.87 /0 B@:0 F0:0
17:52:35.104 : X:100.000 Y:100.000 Z:16.000 E:0.000
17:52:35.106 : Count X:16000 Y:16000 Z:51200
17:52:35.106 : ok
Il count riporta X:16000 Y:16000 Z:51200
sembra moltiplicato per axis step unit
#define DEFAULT_AXIS_STEPS_PER_UNIT {160,160,3200}
....e' corretto ?
17:50:21.678 : N22 G28 Z0*105
.....
17:52:32.787 : T:23.75 /0 @:0 B:13.87 /0 B@:0 F0:0
17:52:33.795 : T:23.75 /0 @:0 B:13.87 /0 B@:0 F0:0
17:52:34.330 : busy:processing
17:52:34.805 : T:23.23 /0 @:0 B:13.87 /0 B@:0 F0:0
17:52:35.104 : X:100.000 Y:100.000 Z:16.000 E:0.000
17:52:35.106 : Count X:16000 Y:16000 Z:51200
17:52:35.106 : ok
Il count riporta X:16000 Y:16000 Z:51200
sembra moltiplicato per axis step unit
#define DEFAULT_AXIS_STEPS_PER_UNIT {160,160,3200}
....e' corretto ?
|
Re: Mkduo 4.4.0 driver TB6600 DEFAULT_AXIS_STEPS_PER_UNIT March 25, 2020 01:56PM |
Registered: 10 years ago Posts: 6,409 |
Si il count ti dice a quanti step è...
COMPRA ITALIANO - sostieni le nostre aziende - sostieni la nostra gente - sostieni il tuo popolo - sosterrai te stesso.
Alberto C. felice possessore di una Kossel K2
My Blog - My Thingiverse
Quote
atomino
Invece sulla home di Z con il Bltouch
17:50:21.678 : N22 G28 Z0*105
.....
17:52:32.787 : T:23.75 /0 @:0 B:13.87 /0 B@:0 F0:0
17:52:33.795 : T:23.75 /0 @:0 B:13.87 /0 B@:0 F0:0
17:52:34.330 : busy:processing
17:52:34.805 : T:23.23 /0 @:0 B:13.87 /0 B@:0 F0:0
17:52:35.104 : X:100.000 Y:100.000 Z:16.000 E:0.000
17:52:35.106 : Count X:16000 Y:16000 Z:51200
17:52:35.106 : ok
Il count riporta X:16000 Y:16000 Z:51200
sembra moltiplicato per axis step unit
#define DEFAULT_AXIS_STEPS_PER_UNIT {160,160,3200}
....e' corretto ?
COMPRA ITALIANO - sostieni le nostre aziende - sostieni la nostra gente - sostieni il tuo popolo - sosterrai te stesso.
Alberto C. felice possessore di una Kossel K2
My Blog - My Thingiverse
|
Re: Mkduo 4.4.0 driver TB6600 DEFAULT_AXIS_STEPS_PER_UNIT March 26, 2020 02:02AM |
Registered: 5 years ago Posts: 96 |
ok, ma su Repetier host nel pannello di controllo manuale riporta gli steps , mentre
ho definito
#define X_MAX_POS 190
#define Y_MAX_POS 340
#define Z_MAX_POS 200
...poi ho sempre il problema sull'azzeramento di X:
17:41:07.480 : N20 G28 X0*105
17:41:07.845 : T:13.10 /0 @:0 B:13.87 /0 B@:0 F0:0
17:41:08.342 : busy:processing
17:41:08.854 : T:13.10 /0 @:0 B:13.87 /0 B@:0 F0:0
17:41:09.268 : N21 M539 P1*94
17:41:09.272 : RequestPause: Homing Failed
17:41:09.273 : X:0.000 Y:0.000 Z:0.000 E:0.000
17:41:09.278 : Count X:0 Y:0 Z:0
17:41:09.278 : ok
17:41:09.278 : wait
17:41:09.281 : echo:Unknown command: "M539 P1"
17:41:09.283 : ok
continuo con questa versione o provo con la 4.3.9 ?
ho definito
#define X_MAX_POS 190
#define Y_MAX_POS 340
#define Z_MAX_POS 200
...poi ho sempre il problema sull'azzeramento di X:
17:41:07.480 : N20 G28 X0*105
17:41:07.845 : T:13.10 /0 @:0 B:13.87 /0 B@:0 F0:0
17:41:08.342 : busy:processing
17:41:08.854 : T:13.10 /0 @:0 B:13.87 /0 B@:0 F0:0
17:41:09.268 : N21 M539 P1*94
17:41:09.272 : RequestPause: Homing Failed
17:41:09.273 : X:0.000 Y:0.000 Z:0.000 E:0.000
17:41:09.278 : Count X:0 Y:0 Z:0
17:41:09.278 : ok
17:41:09.278 : wait
17:41:09.281 : echo:Unknown command: "M539 P1"
17:41:09.283 : ok
continuo con questa versione o provo con la 4.3.9 ?
|
Re: Mkduo 4.4.0 driver TB6600 DEFAULT_AXIS_STEPS_PER_UNIT March 26, 2020 06:43AM |
Registered: 10 years ago Posts: 6,409 |
Certo che puoi rimanere su questa versione... Ma non capisco qual'è il problema..
Se riporta che ha fallito la home vuol dire che non riesce a farla...
Quindi bisogna analizzare il problema.
Primo gli endstop funzionano
Secondo continui a darmi le definizioni nella configurazione con i define, ma come al solito ripeto non centrano nulla, vanno visti quelli che sono all'interno del fw. Pos max e min per ogni asse sono salvati in eeprom.
Terzo i motori si muovono nella direzione giusta?
Insomma se non mi spieghi queste cose difficilmente ne usciamo..
Poi perché repetier Host da come comando M539 P1, lo dai te o cosa???
COMPRA ITALIANO - sostieni le nostre aziende - sostieni la nostra gente - sostieni il tuo popolo - sosterrai te stesso.
Alberto C. felice possessore di una Kossel K2
My Blog - My Thingiverse
Se riporta che ha fallito la home vuol dire che non riesce a farla...
Quindi bisogna analizzare il problema.
Primo gli endstop funzionano
Secondo continui a darmi le definizioni nella configurazione con i define, ma come al solito ripeto non centrano nulla, vanno visti quelli che sono all'interno del fw. Pos max e min per ogni asse sono salvati in eeprom.
Terzo i motori si muovono nella direzione giusta?
Insomma se non mi spieghi queste cose difficilmente ne usciamo..
Poi perché repetier Host da come comando M539 P1, lo dai te o cosa???
COMPRA ITALIANO - sostieni le nostre aziende - sostieni la nostra gente - sostieni il tuo popolo - sosterrai te stesso.
Alberto C. felice possessore di una Kossel K2
My Blog - My Thingiverse
|
Re: Mkduo 4.4.0 driver TB6600 DEFAULT_AXIS_STEPS_PER_UNIT March 26, 2020 10:46AM |
Registered: 5 years ago Posts: 96 |
Premetto ho cambiato il sensore asse X, la ramps1.4, Arduino e il Tb6600.
Se disabilito i motori e sposto X a zero con M119
15:23:13.680 : N53 M119*28
15:23:13.686 : Reporting endstop status
15:23:13.930 : T:10.66 /0 @:0 B:11.50 /0 B@:0 F0:0
15:23:14.240 : x_min: TRIGGERED
15:23:14.242 : y_min: NOT TRIGGERED
15:23:14.242 : z_min: NOT TRIGGERED
15:23:14.244 : filament 0: TRIGGERED
La cosa che ho notato , quando invio comando di home X,
arretra verso il sensore , ma senza raggiungerlo si ferma
inverte la direzione e ritorna nella posizione dove di era
fermato lentamente, come se avesse ricevuto il segnale di Triggered.
Non sempre si comporta cosi', qualche volta fa lo zero correttamente
I sensori sono quelli ottici con alimentazione e
Sotto i dati da eeprom ed allegato il configuration_overall.h
15:18:38.757 : N49 M503*24
15:18:38.763 : Config: G21 ; Units in (mm)
15:18:38.763 : Config teps per unit:
teps per unit:
15:18:38.765 : Config: M92 X160.000 Y160.000 Z3200.000
15:18:38.767 : Config: M92 T0 E194.950
15:18:38.770 : Config:Maximum Acceleration (units/s2):
15:18:38.770 : Config: M201 X3000 Y3000 Z50
15:18:38.770 : Config: M201 T0 E3000
15:18:38.772 : Config:Maximum feedrates (units/s):
15:18:38.774 : Config: M203 X300.000 Y300.000 Z2.000
15:18:38.778 : Config: M203 T0 E100.000
15:18:38.780 : Config:Acceleration (units/s2): P V T* R
15:18:38.783 : Config: M204 P1000.000 V1000.000
15:18:38.783 : Config: M204 T0 R5000.000
15:18:38.787 : Config:Advanced: B S V
15:18:38.792 : Config: M2 T:13.10 /0 @:0 B:13.10 /0 B@:0 F0:0
15:18:38.792 : 05 B20000 S0.000 V0.000
15:18:38.795 : Config:Jerk: X Y Z T* E
15:18:38.797 : Config: M205 X10.000 Y10.000 Z0.400
15:18:38.797 : Config: M205 T0 E5.000
15:18:38.799 : Configet axis max travel:
15:18:38.799 : Config: M228 S0 X190.000 Y340.000 Z200.000
15:18:38.802 : Configet axis min travel:
15:18:38.804 : Config: M228 S1 X0.000 Y0.000 Z0.000
15:18:38.806 : Config:Total number D E H B C
15:18:38.809 : Config: M353 D1 E1 H1 B1 C0 F1
15:18:38.811 : Config:Hotend assignment T H
15:18:38.811 : Config: M563 T0 D0 H0
15:18:38.815 : Config:Heater Sensor parameters: H P S A B C R L O:
15:18:38.820 : Config: M305 H0 P13 S1 A100000.0 B4092.0 C0.0000000000 R4700.0 L0 O0
15:18:38.830 : Config:Heater parameters: H P A B C F L O U I R Q:
15:18:38.833 : Config: M306 H0 P10 A40 B230 C255 F250 L5 O300 U1 I0 Q1 R0
15:18:38.837 : Config:Heater PID parameters: H P I D:
15:18:38.837 : Config: M301 H0 P25.36 I2.95 D54.53
15:18:38.844 : Config:Heater Sensor parameters: H T P S A B C R L O:
15:18:38.847 : Config: M305 H-1 T0 P14 S1 A100000.0 B4092.0 C0.0000000000 R4700.0 L0 O0
15:18:38.857 : Config:Heater parameters: H T P A B C F L O U I R Q:
15:18:38.859 : Config: M306 H-1 T0 P8 A40 B230 C255 F100 L5 O150 U0 I0 Q1 R0
15:18:38.861 : Config:Nozzle Park: X Y Z
15:18:38.861 : Config: M217 X10.00 Y10.00 Z20.00
15:18:38.866 : Config:Hotend offset (unit): T X Y Z:
15:18:38.868 : Config: M218 T0 X0.000 Y0.000 Z0.000
15:18:38.871 : Config:Fans: P U L X I H T F
15:18:38.873 : Config: M106 P0 U9 L0 X255 F250 I0 H-1
15:18:38.875 : Config:Endstops logic:
15:18:38.875 : Config: M123 X0 Y0 Z0
15:18:38.878 : Config:Endstops pullup:
15:18:38.878 : Config: M124 X1 Y1 Z1
15:18:38.878 : Config: M149 C ; Units in Celsius
15:18:38.884 : Configervo Angles: P L U:
15:18:38.887 : Config: M281 P0 L10 U90
15:18:38.890 : Config robe Offset X Y Z, speed Fast and Slow [mm/min], Repetitions
robe Offset X Y Z, speed Fast and Slow [mm/min], Repetitions
15:18:38.890 : Config: M851 X0.000 Y0.000 Z-1.000 F1000 S500 R1
15:18:38.890 : Config:Material heatup parameters
15:18:38.890 : Config: M145 S0 H190 B60 F255
15:18:38.892 : Config: M145 S1 H240 B100 F255
15:18:38.893 : Config: M145 S2 H230 B60 F255
15:18:38.895 : Config:Filament runout: S H D
15:18:38.897 : Config: M412 S1 H0 D5.00
15:18:38.902 : Configtepper driver pins E D
Se disabilito i motori e sposto X a zero con M119
15:23:13.680 : N53 M119*28
15:23:13.686 : Reporting endstop status
15:23:13.930 : T:10.66 /0 @:0 B:11.50 /0 B@:0 F0:0
15:23:14.240 : x_min: TRIGGERED
15:23:14.242 : y_min: NOT TRIGGERED
15:23:14.242 : z_min: NOT TRIGGERED
15:23:14.244 : filament 0: TRIGGERED
La cosa che ho notato , quando invio comando di home X,
arretra verso il sensore , ma senza raggiungerlo si ferma
inverte la direzione e ritorna nella posizione dove di era
fermato lentamente, come se avesse ricevuto il segnale di Triggered.
Non sempre si comporta cosi', qualche volta fa lo zero correttamente
I sensori sono quelli ottici con alimentazione e
Sotto i dati da eeprom ed allegato il configuration_overall.h
15:18:38.757 : N49 M503*24
15:18:38.763 : Config: G21 ; Units in (mm)
15:18:38.763 : Config
teps per unit:15:18:38.765 : Config: M92 X160.000 Y160.000 Z3200.000
15:18:38.767 : Config: M92 T0 E194.950
15:18:38.770 : Config:Maximum Acceleration (units/s2):
15:18:38.770 : Config: M201 X3000 Y3000 Z50
15:18:38.770 : Config: M201 T0 E3000
15:18:38.772 : Config:Maximum feedrates (units/s):
15:18:38.774 : Config: M203 X300.000 Y300.000 Z2.000
15:18:38.778 : Config: M203 T0 E100.000
15:18:38.780 : Config:Acceleration (units/s2): P V T* R
15:18:38.783 : Config: M204 P1000.000 V1000.000
15:18:38.783 : Config: M204 T0 R5000.000
15:18:38.787 : Config:Advanced: B S V
15:18:38.792 : Config: M2 T:13.10 /0 @:0 B:13.10 /0 B@:0 F0:0
15:18:38.792 : 05 B20000 S0.000 V0.000
15:18:38.795 : Config:Jerk: X Y Z T* E
15:18:38.797 : Config: M205 X10.000 Y10.000 Z0.400
15:18:38.797 : Config: M205 T0 E5.000
15:18:38.799 : Config
et axis max travel:15:18:38.799 : Config: M228 S0 X190.000 Y340.000 Z200.000
15:18:38.802 : Config
et axis min travel:15:18:38.804 : Config: M228 S1 X0.000 Y0.000 Z0.000
15:18:38.806 : Config:Total number D E H B C
15:18:38.809 : Config: M353 D1 E1 H1 B1 C0 F1
15:18:38.811 : Config:Hotend assignment T H
15:18:38.811 : Config: M563 T0 D0 H0
15:18:38.815 : Config:Heater Sensor parameters: H P S A B C R L O:
15:18:38.820 : Config: M305 H0 P13 S1 A100000.0 B4092.0 C0.0000000000 R4700.0 L0 O0
15:18:38.830 : Config:Heater parameters: H P A B C F L O U I R Q:
15:18:38.833 : Config: M306 H0 P10 A40 B230 C255 F250 L5 O300 U1 I0 Q1 R0
15:18:38.837 : Config:Heater PID parameters: H P I D:
15:18:38.837 : Config: M301 H0 P25.36 I2.95 D54.53
15:18:38.844 : Config:Heater Sensor parameters: H T P S A B C R L O:
15:18:38.847 : Config: M305 H-1 T0 P14 S1 A100000.0 B4092.0 C0.0000000000 R4700.0 L0 O0
15:18:38.857 : Config:Heater parameters: H T P A B C F L O U I R Q:
15:18:38.859 : Config: M306 H-1 T0 P8 A40 B230 C255 F100 L5 O150 U0 I0 Q1 R0
15:18:38.861 : Config:Nozzle Park: X Y Z
15:18:38.861 : Config: M217 X10.00 Y10.00 Z20.00
15:18:38.866 : Config:Hotend offset (unit): T X Y Z:
15:18:38.868 : Config: M218 T0 X0.000 Y0.000 Z0.000
15:18:38.871 : Config:Fans: P U L X I H T F
15:18:38.873 : Config: M106 P0 U9 L0 X255 F250 I0 H-1
15:18:38.875 : Config:Endstops logic:
15:18:38.875 : Config: M123 X0 Y0 Z0
15:18:38.878 : Config:Endstops pullup:
15:18:38.878 : Config: M124 X1 Y1 Z1
15:18:38.878 : Config: M149 C ; Units in Celsius
15:18:38.884 : Config
ervo Angles: P L U:15:18:38.887 : Config: M281 P0 L10 U90
15:18:38.890 : Config
robe Offset X Y Z, speed Fast and Slow [mm/min], Repetitions15:18:38.890 : Config: M851 X0.000 Y0.000 Z-1.000 F1000 S500 R1
15:18:38.890 : Config:Material heatup parameters
15:18:38.890 : Config: M145 S0 H190 B60 F255
15:18:38.892 : Config: M145 S1 H240 B100 F255
15:18:38.893 : Config: M145 S2 H230 B60 F255
15:18:38.895 : Config:Filament runout: S H D
15:18:38.897 : Config: M412 S1 H0 D5.00
15:18:38.902 : Config
tepper driver pins E D
|
Re: Mkduo 4.4.0 driver TB6600 DEFAULT_AXIS_STEPS_PER_UNIT March 26, 2020 10:54AM |
Registered: 10 years ago Posts: 6,409 |
Se sono ottici escono sia con segnale alto che con quello basso quindi non c'è bisogno della pullup
Controlli per favore con X staccato se ti da endstop not trigger e poi con l'endstop premuto o con il carrello in home se da triggered..
Se si ferma prima significa che rileva triggerd, molto probabilmente hai false letture. Possibile interferenze sui cavi, o altro...
COMPRA ITALIANO - sostieni le nostre aziende - sostieni la nostra gente - sostieni il tuo popolo - sosterrai te stesso.
Alberto C. felice possessore di una Kossel K2
My Blog - My Thingiverse
Controlli per favore con X staccato se ti da endstop not trigger e poi con l'endstop premuto o con il carrello in home se da triggered..
Se si ferma prima significa che rileva triggerd, molto probabilmente hai false letture. Possibile interferenze sui cavi, o altro...
COMPRA ITALIANO - sostieni le nostre aziende - sostieni la nostra gente - sostieni il tuo popolo - sosterrai te stesso.
Alberto C. felice possessore di una Kossel K2
My Blog - My Thingiverse
|
Re: Mkduo 4.4.0 driver TB6600 DEFAULT_AXIS_STEPS_PER_UNIT March 26, 2020 11:19AM |
Registered: 5 years ago Posts: 96 |
Se stacco il connettore dal sensore M119 mi da Triggered
Se attacco il cavo e sposto il piatto senza impegnare il sensore ho Not Triggered
con il sensore impegnato ho Triggered
Sto utilizzando un cavo multipolare nel quale ho collegato sia il motore che il
sensore
Provo a metter un cavo separato per il sensore ?
Se attacco il cavo e sposto il piatto senza impegnare il sensore ho Not Triggered
con il sensore impegnato ho Triggered
Sto utilizzando un cavo multipolare nel quale ho collegato sia il motore che il
sensore
Provo a metter un cavo separato per il sensore ?
|
Re: Mkduo 4.4.0 driver TB6600 DEFAULT_AXIS_STEPS_PER_UNIT March 26, 2020 11:48AM |
Registered: 10 years ago Posts: 6,409 |
Si... o li devi schermare... Intanto prova a disabilitare la pullup con il comando...
COMPRA ITALIANO - sostieni le nostre aziende - sostieni la nostra gente - sostieni il tuo popolo - sosterrai te stesso.
Alberto C. felice possessore di una Kossel K2
My Blog - My Thingiverse
COMPRA ITALIANO - sostieni le nostre aziende - sostieni la nostra gente - sostieni il tuo popolo - sosterrai te stesso.
Alberto C. felice possessore di una Kossel K2
My Blog - My Thingiverse
|
Re: Mkduo 4.4.0 driver TB6600 DEFAULT_AXIS_STEPS_PER_UNIT March 26, 2020 12:01PM |
Registered: 5 years ago Posts: 96 |
|
Re: Mkduo 4.4.0 driver TB6600 DEFAULT_AXIS_STEPS_PER_UNIT March 26, 2020 01:51PM |
Registered: 5 years ago Posts: 96 |
Argomento Bltouch.
Ho il define Bltouch e fa l'home in
#define Z_SAFE_HOMING
#define Z_SAFE_HOMING_X_POINT 100
#define Z_SAFE_HOMING_Y_POINT 100
pensavo di fare il livellamento a 3 punti
#define AUTO_BED_LEVELING_3POINT
dove definisco le coordinate dei 3 punti ?
come faccio a vedere la Z rilevata nei 3 punti ?
nello start Gcode devo dare un comando ?
Ho il define Bltouch e fa l'home in
#define Z_SAFE_HOMING
#define Z_SAFE_HOMING_X_POINT 100
#define Z_SAFE_HOMING_Y_POINT 100
pensavo di fare il livellamento a 3 punti
#define AUTO_BED_LEVELING_3POINT
dove definisco le coordinate dei 3 punti ?
come faccio a vedere la Z rilevata nei 3 punti ?
nello start Gcode devo dare un comando ?
|
Re: Mkduo 4.4.0 driver TB6600 DEFAULT_AXIS_STEPS_PER_UNIT March 26, 2020 02:45PM |
Registered: 10 years ago Posts: 6,409 |
Le coordinate dei tre punti vengono calcolate in automatico dal fw tenendo conto delle dimensioni del piatto e del valore MIN_PROBE_EDGE che equivale a quanto deve stare nel piatto.
il comando G29 prevede il sotto comando V Verbose [0-4] quindi con G29 V4 hai tutte le info che ti servono quando fa la probe.
Se salvi i valori puoi fare G29 solo una volta poi memorizzi in EEPROM e ti basta un M420 S1 dopo G28 nello start gcode, altrimenti fai ogni volta l'ABL con G29 dopo G28.
COMPRA ITALIANO - sostieni le nostre aziende - sostieni la nostra gente - sostieni il tuo popolo - sosterrai te stesso.
Alberto C. felice possessore di una Kossel K2
My Blog - My Thingiverse
il comando G29 prevede il sotto comando V Verbose [0-4] quindi con G29 V4 hai tutte le info che ti servono quando fa la probe.
Se salvi i valori puoi fare G29 solo una volta poi memorizzi in EEPROM e ti basta un M420 S1 dopo G28 nello start gcode, altrimenti fai ogni volta l'ABL con G29 dopo G28.
COMPRA ITALIANO - sostieni le nostre aziende - sostieni la nostra gente - sostieni il tuo popolo - sosterrai te stesso.
Alberto C. felice possessore di una Kossel K2
My Blog - My Thingiverse
|
Re: Mkduo 4.4.0 driver TB6600 DEFAULT_AXIS_STEPS_PER_UNIT March 29, 2020 05:31AM |
Registered: 5 years ago Posts: 96 |
Come interpreto i dati ?
Per memorizzarli in eeprom M500 ?
11:28:33.866 : Bed Level Correction Matrix:
11:28:33.868 : +0.999999 +0.000000 +0.001138
11:28:33.868 : +0.000000 +1.000000 -0.000184
11:28:33.871 : -0.001138 +0.000184 +0.999999
11:28:33.875 : X:70.018 Y:344.997 Z:16.081 E:34.739
11:28:33.877 : Count X:11200 Y:55200 Z:51207
11:28:33.878 : ok
Per memorizzarli in eeprom M500 ?
11:28:33.866 : Bed Level Correction Matrix:
11:28:33.868 : +0.999999 +0.000000 +0.001138
11:28:33.868 : +0.000000 +1.000000 -0.000184
11:28:33.871 : -0.001138 +0.000184 +0.999999
11:28:33.875 : X:70.018 Y:344.997 Z:16.081 E:34.739
11:28:33.877 : Count X:11200 Y:55200 Z:51207
11:28:33.878 : ok
|
Re: Mkduo 4.4.0 driver TB6600 DEFAULT_AXIS_STEPS_PER_UNIT March 29, 2020 12:49PM |
Registered: 5 years ago Posts: 96 |
|
Re: Mkduo 4.4.0 driver TB6600 DEFAULT_AXIS_STEPS_PER_UNIT March 29, 2020 12:50PM |
Registered: 5 years ago Posts: 96 |
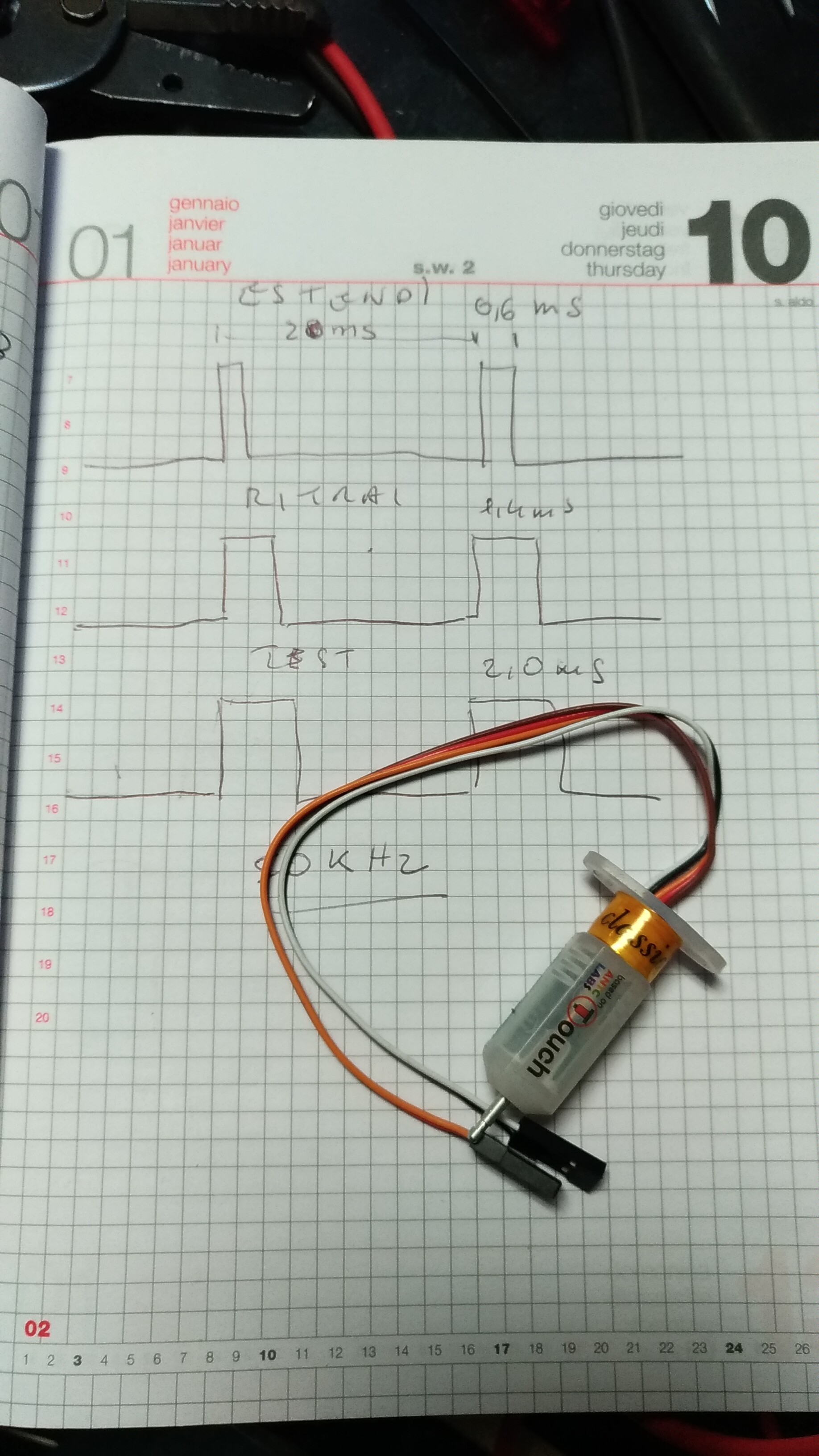
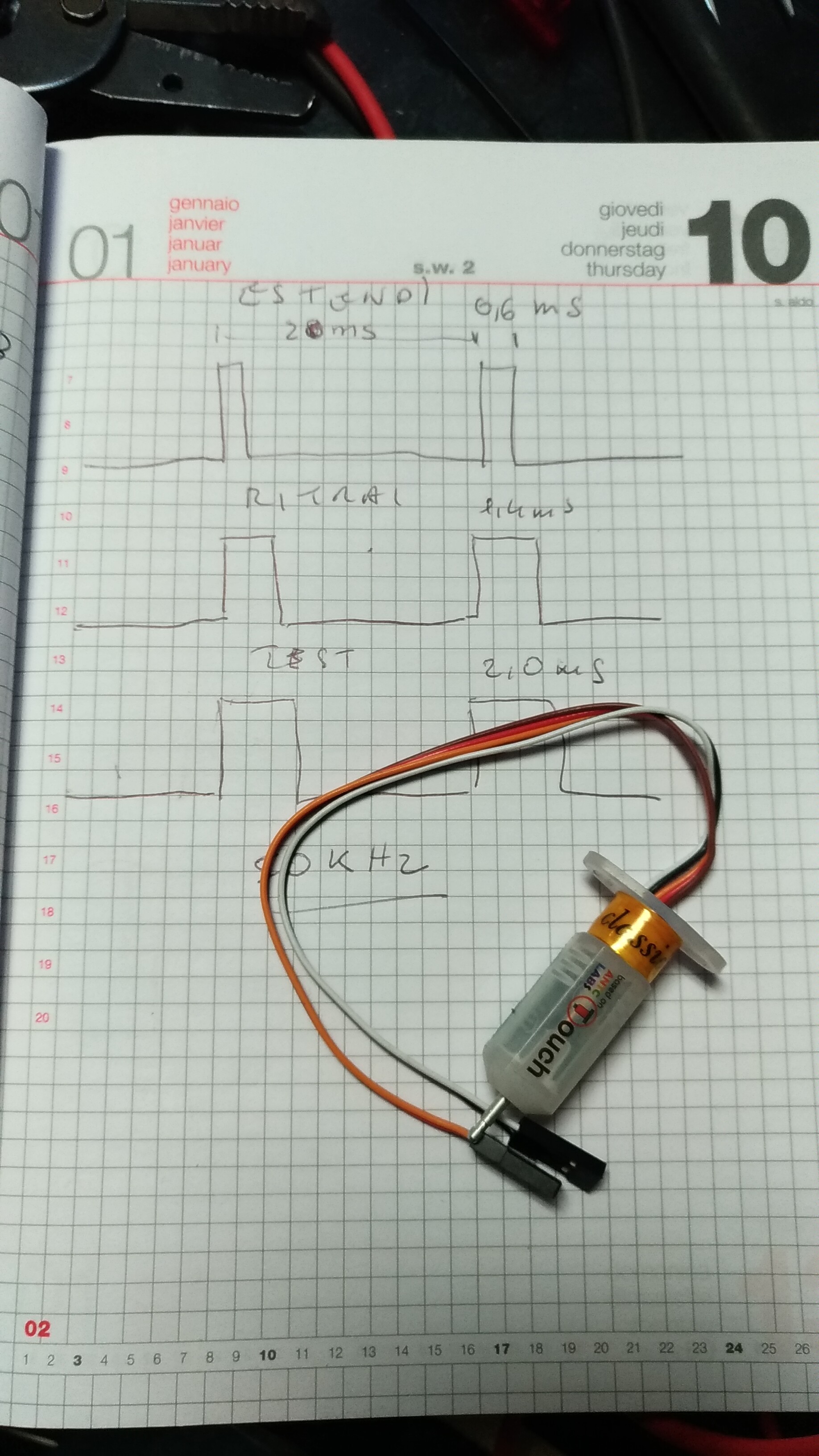
Ho dei problemi con il Bltouch e ci sto impazzendo !!!!
IL Bltouch ha l'alimentazione collegata al +5V (filo rosso ) gnd ( filo marrone ) arancio al Servo n.1, filo bianco Zmin e nero
Se scollego il filo arancio dal servo n.1 il Bltouch rimane fermo.
Se lo collego ed attivo la temperatura dell'estrusore quando la temperatura e' raggiunta equindi avviene il mantenimento,
il tastatore del Bltouch incomincia ad andare in su e giu' in modo causale e dannoso per il lavoro che sta eseguendo.
Ho collegato un oscilloscopio analogico sul pin del Servo n.1 dove c'e' una frequenza a 50KHz ( periodo 20 ms) con livello 0-5V
se vado in Configurazione Bltouch ho notato che la frequenza non cambia ma cambia il duty cycle:
in Estendi il picco dura circa 0.6ms
in Ritrai il picco dura circa 1.4 ms
in Test il picco dura 2.0 ms ( Estendi /Ritrai in continuo)
Quando e' in mantenimento della temperatura sembra (con l'oscilloscopio analogico non e' facile da prendere il treno di impulsi )
che il picco anziche' durare 1.4 ms, duri meno e causi al tastatore di andare giu'.
Non so se sbaglio qualcosa, e non so se il Bltouch e' originale, ho postato la foto.
IL Bltouch ha l'alimentazione collegata al +5V (filo rosso ) gnd ( filo marrone ) arancio al Servo n.1, filo bianco Zmin e nero
Se scollego il filo arancio dal servo n.1 il Bltouch rimane fermo.
Se lo collego ed attivo la temperatura dell'estrusore quando la temperatura e' raggiunta equindi avviene il mantenimento,
il tastatore del Bltouch incomincia ad andare in su e giu' in modo causale e dannoso per il lavoro che sta eseguendo.
Ho collegato un oscilloscopio analogico sul pin del Servo n.1 dove c'e' una frequenza a 50KHz ( periodo 20 ms) con livello 0-5V
se vado in Configurazione Bltouch ho notato che la frequenza non cambia ma cambia il duty cycle:
in Estendi il picco dura circa 0.6ms
in Ritrai il picco dura circa 1.4 ms
in Test il picco dura 2.0 ms ( Estendi /Ritrai in continuo)
Quando e' in mantenimento della temperatura sembra (con l'oscilloscopio analogico non e' facile da prendere il treno di impulsi )
che il picco anziche' durare 1.4 ms, duri meno e causi al tastatore di andare giu'.
Non so se sbaglio qualcosa, e non so se il Bltouch e' originale, ho postato la foto.
|
Re: Mkduo 4.4.0 driver TB6600 DEFAULT_AXIS_STEPS_PER_UNIT March 29, 2020 04:59PM |
Registered: 10 years ago Posts: 3,268 |
prendilo con il beneficio del dubbio, ma quel "based on" non mi fa pensare che sia originale...
come clone potrebbe avere un collegamento diverso, come mi sembra avvenga per il 3d touch. Prova a fare una ricerca per vedere se è questo il tuo caso.
originale:
[www.antclabs.com]
vedi:
[www.youtube.com]
Edited 1 time(s). Last edit at 03/29/2020 04:59PM by bilanciamist.
Alessandro
Prusa I3 Rework molto modificata - Taurino Classic - Ramps 1.4 - Driver DVR8825 - Titan Extruder e Hotend E3D V6 - Bltouch originale - Firmware MarlinKimbra - Cura - Repetier Host
come clone potrebbe avere un collegamento diverso, come mi sembra avvenga per il 3d touch. Prova a fare una ricerca per vedere se è questo il tuo caso.
originale:
[www.antclabs.com]
vedi:
[www.youtube.com]
Edited 1 time(s). Last edit at 03/29/2020 04:59PM by bilanciamist.
Alessandro
Prusa I3 Rework molto modificata - Taurino Classic - Ramps 1.4 - Driver DVR8825 - Titan Extruder e Hotend E3D V6 - Bltouch originale - Firmware MarlinKimbra - Cura - Repetier Host
|
Re: Mkduo 4.4.0 driver TB6600 DEFAULT_AXIS_STEPS_PER_UNIT March 30, 2020 02:03AM |
Registered: 5 years ago Posts: 96 |
Si, non e' un originale, ma sembra lavorare correttamente nel momento dell'ABL,
questi i risultati che non so interpretrare se giusti o meno nel rilevamento dei 3 punti :
11:28:33.866 : Bed Level Correction Matrix:
11:28:33.868 : +0.999999 +0.000000 +0.001138
11:28:33.868 : +0.000000 +1.000000 -0.000184
11:28:33.871 : -0.001138 +0.000184 +0.999999
11:28:33.875 : X:70.018 Y:344.997 Z:16.081 E:34.739
11:28:33.877 : Count X:11200 Y:55200 Z:51207
11:28:33.878 : ok
Se i dati sono corretti, il problema credo che sia nel firmware al momento che e' stata
raggiunta la temperatura e fa il mantenimento, in questa fase il servo n.1 riduce il duty
cycle del segnale ed il tastatore si estende.
Ripeto sei i dati dell'ABL sono corretti una volta fatto il G29 basta staccare il pin dal
servo, altrimenti occorre l'intervento del Mago.
questi i risultati che non so interpretrare se giusti o meno nel rilevamento dei 3 punti :
11:28:33.866 : Bed Level Correction Matrix:
11:28:33.868 : +0.999999 +0.000000 +0.001138
11:28:33.868 : +0.000000 +1.000000 -0.000184
11:28:33.871 : -0.001138 +0.000184 +0.999999
11:28:33.875 : X:70.018 Y:344.997 Z:16.081 E:34.739
11:28:33.877 : Count X:11200 Y:55200 Z:51207
11:28:33.878 : ok
Se i dati sono corretti, il problema credo che sia nel firmware al momento che e' stata
raggiunta la temperatura e fa il mantenimento, in questa fase il servo n.1 riduce il duty
cycle del segnale ed il tastatore si estende.
Ripeto sei i dati dell'ABL sono corretti una volta fatto il G29 basta staccare il pin dal
servo, altrimenti occorre l'intervento del Mago.
|
Re: Mkduo 4.4.0 driver TB6600 DEFAULT_AXIS_STEPS_PER_UNIT March 30, 2020 02:08AM |
Registered: 10 years ago Posts: 6,409 |
Ciao, la gestione servo avviene tramite dei timer e libreria servo, non c'è nessun collegamento con la temperatura, ma il tutto avviene al livello hardware.
Quindi il problema è da ricercare sull'hardware...
COMPRA ITALIANO - sostieni le nostre aziende - sostieni la nostra gente - sostieni il tuo popolo - sosterrai te stesso.
Alberto C. felice possessore di una Kossel K2
My Blog - My Thingiverse
Quindi il problema è da ricercare sull'hardware...
COMPRA ITALIANO - sostieni le nostre aziende - sostieni la nostra gente - sostieni il tuo popolo - sosterrai te stesso.
Alberto C. felice possessore di una Kossel K2
My Blog - My Thingiverse
|
Re: Mkduo 4.4.0 driver TB6600 DEFAULT_AXIS_STEPS_PER_UNIT March 30, 2020 04:15AM |
Registered: 5 years ago Posts: 96 |
Ok, puoi darmi una spiegazione di questi dati ?
11:28:33.866 : Bed Level Correction Matrix:
11:28:33.868 : +0.999999 +0.000000 +0.001138
11:28:33.868 : +0.000000 +1.000000 -0.000184
11:28:33.871 : -0.001138 +0.000184 +0.999999
11:28:33.875 : X:70.018 Y:344.997 Z:16.081 E:34.739
11:28:33.877 : Count X:11200 Y:55200 Z:51207
11:28:33.878 : ok
11:28:33.866 : Bed Level Correction Matrix:
11:28:33.868 : +0.999999 +0.000000 +0.001138
11:28:33.868 : +0.000000 +1.000000 -0.000184
11:28:33.871 : -0.001138 +0.000184 +0.999999
11:28:33.875 : X:70.018 Y:344.997 Z:16.081 E:34.739
11:28:33.877 : Count X:11200 Y:55200 Z:51207
11:28:33.878 : ok

{kind=link}
{kind=link}
{kind=link}
{kind=link}
Sorry, only registered users may post in this forum.