Home
>
RepRap User Groups
>
Europe
>
Italy RepRap User Group - Gruppo RepRap Italia
>
Progetti e nuove idee
>
Topic
>
Page 2
corexy variante
Posted by mic
Re: Parte2 il mare di varianti (o il mare dei mostri)  April 23, 2014 08:06PM |
Registered: 10 years ago Posts: 388 |
interessante sono come 2 h-bot messi insieme però messo cosi diminuisce di molto l'area utile, penso si possa completamente sovrapporre a patto di creare un cartello adatto.Quote
Davide (Aqua Dulza)
Sul tema modifiche del sistema H-bot (non saprei se definirla una miglioria) nella pagina HBot using fishing line appare questo schema (ipotizzato da Greg Frost per usare filo da pesca al posto delle cinghie dentate) che recita "le forze si cancellano quindi niente torsione degli assi" colorando le parti per distinguerle, avremo in rosso e in blu i due fili da pesca e in verde le altre parti
[attachment 30890 Filodapescamodificatocolorato.jpg]
Ho provato a migliorare la leggibilità dello schizzo a matita originale e ho ridisegnato uno schema con le freccine, da cui ricavare un 3D più comprensibile (almeno nell'intenzione).
[attachment 30891 Filodapescaschemacolore.jpg] [attachment 30892 Filodapescamodello3D.jpg]
Di sicuro il filo da pesca fa un bel giro, per migliorare il "grip" del filo attorno alle pulegge S1 ed S2 si potrebbe implementare un sistema come questo, sempre visibile alla pagina HBot using fishing line e proposto da crispy1
[attachment 30893 Filodapescatensionatore.jpg]
Come alternativa al filo da pesca ipotizzerei un sottile filo di acciaio usato da "un coso" che pochi ricorderanno, il parallelografo o riga parallela (come meccanismo somigliava al Core XY).
Era una riga con 2 cavi che uscivano da entrambe le estremità. I cavi seguivano un percorso simile a quello dell'immagine qui sotto, oppure i due estremi dei cavi, nella parte alta, curvavano ognuno sulla propria puleggia (ancorata al tavolo da disegno) e si collegavano "di testa" attraverso una molla tenditrice.
Il cavo (visibile qui e qui) viene descrittto come "fatto di acciaio inox ricoperto di nylon" non dovrebbe soffrire di molta elasticità, e la guaina di nylon dovrebbe permettere una buona aderenza senza segare pulegge e cuscinetti (stampati in plastica) come fa lo spago con la polenta (questo paragone forse non sarà chiaro a tutti).
Sempre in tema di varianti (adesso vedrete il vero mostro), avete per caso nostalgia della cara vecchia Darwin e delle sue barre filettate ??
Le sane notti di sonno vi hanno scassatola minl'anima ? Allora provate a costruire questa mostruosità nata dalla fantasia di unlimitedbacon (se volete urlare di terrore).... volate a questa pagina per ammirarla I designed a polar printer.
[attachment 30894 mostro.png].
Se non siete scappati via alla vista di cotanta....... (non trovo l'aggettivo adatto) saluti a tutti




|
Re: corexy variante April 24, 2014 10:56AM |
Registered: 10 years ago Posts: 132 |
Ciao Fuma, innanzitutto complimenti per il progetto, che software usi ? e dove hai trovato i modelli dei supporti per motori e cinghie ? sono progettati da zero anche quelli ??
A proposito della tua domanda, il tuo sistema,
mi sembra identico a quello all'inizio del mio post precedente, preso dal sito giapponese...
Sul perchè non abbiano usato un sistema così semplice....... (risposta breve: boh!) risposta lunga, secondo quanto dicono il sistema "semplice" genera torsioni e possibili impuntamenti della meccanica di scorrimentodella parte evidenziata in giallo nella GIF animata (questa parte è ricorretta e approfondita nel mio successivo post).
AGGIORNAMENTO La parte che si impunta è il carrello mobile dell'asse X cioè la parte (immobile al centro della GIF) lungo la quale scorre il carrellino evidenziato in giallo.
Però io non ho fatto nessun tipo di prove, (non ho nemmeno ancora una stampante) mi limito a riportare le idee (qualcuna apparentemente bizzarra) proposte da altri....
Nel caso in cui qualcuno si chieda il perché di questa mia passione da copista, è presto detto, non avendo fatto prove, ciò che vedo fatto (o proposto) da altri potrebbe essere una buona idea fino a che non si dimostri il contrario. Non potendo "filtrare" autonomamente l'aria fritta dalle perle di saggezza, sottopongo al forum l'assieme delle due.
Ha funzionato con Termistore, migliorarne la leggibilità (forse) [Topic in TecniCOLOR] e anche con Muovi il motorino e bruci l'Arduino ?
[Topic in TecniCOLOR] e anche con Muovi il motorino e bruci l'Arduino ? in entrambi i casi la cultura delle persone del forum (che ringrazio) ha fatto luce su una materia (l'elettronica) a me del tutto ignota....
in entrambi i casi la cultura delle persone del forum (che ringrazio) ha fatto luce su una materia (l'elettronica) a me del tutto ignota....
Saluti
Edited 1 time(s). Last edit at 04/24/2014 05:42PM by Davide (Aqua Dulza).
A proposito della tua domanda, il tuo sistema,
mi sembra identico a quello all'inizio del mio post precedente, preso dal sito giapponese...


Sul perchè non abbiano usato un sistema così semplice....... (risposta breve: boh!) risposta lunga, secondo quanto dicono il sistema "semplice" genera torsioni e possibili impuntamenti della meccanica di scorrimento
AGGIORNAMENTO La parte che si impunta è il carrello mobile dell'asse X cioè la parte (immobile al centro della GIF) lungo la quale scorre il carrellino evidenziato in giallo.
Però io non ho fatto nessun tipo di prove, (non ho nemmeno ancora una stampante) mi limito a riportare le idee (qualcuna apparentemente bizzarra) proposte da altri....
Nel caso in cui qualcuno si chieda il perché di questa mia passione da copista, è presto detto, non avendo fatto prove, ciò che vedo fatto (o proposto) da altri potrebbe essere una buona idea fino a che non si dimostri il contrario. Non potendo "filtrare" autonomamente l'aria fritta dalle perle di saggezza, sottopongo al forum l'assieme delle due.
Ha funzionato con Termistore, migliorarne la leggibilità (forse)
[Topic in TecniCOLOR] e anche con Muovi il motorino e bruci l'Arduino ? in entrambi i casi la cultura delle persone del forum (che ringrazio) ha fatto luce su una materia (l'elettronica) a me del tutto ignota....Saluti
Quote
Fuma
.......come mai non è stato preso in considerazione un hbot come da allegato.
Lo chiedo perchè è quello che sto sviluppando per me......
Ciao
Edited 1 time(s). Last edit at 04/24/2014 05:42PM by Davide (Aqua Dulza).
|
Re: corexy variante April 24, 2014 11:02AM |
Registered: 11 years ago Posts: 1,865 |
o anche quello della buccaner
[start3dprinting.com]
e simile a
[blog.ufactory.cc]
Comunque poco ci vuole.
Col sistema hbot il design è molto semplice e funzionale, peccato le torsioni
Ciao
Enrico
[www.dapa3dservice.it] [www.studiodapa.it]
repstrap dApA, Ramps 1.4, MarlinKimbra / scanner 3D Cubify Sense / Formlabs Form 2
[start3dprinting.com]
e simile a
[blog.ufactory.cc]
Comunque poco ci vuole.
Col sistema hbot il design è molto semplice e funzionale, peccato le torsioni
Ciao
Enrico
[www.dapa3dservice.it] [www.studiodapa.it]
repstrap dApA, Ramps 1.4, MarlinKimbra / scanner 3D Cubify Sense / Formlabs Form 2
|
Re: corexy variante April 24, 2014 11:30AM |
Registered: 10 years ago Posts: 388 |
|
Re: corexy variante April 24, 2014 12:14PM |
Registered: 10 years ago Posts: 137 |
Torsioni cosa intendete di preciso e dove?
Davide (che ringrazio per il mega post) indicava nella parte gialla il problema, ma usando dei pattini lineari come la soluzione postata da Enrico non si risolvono?
Se il problema è l'aggancio delle cinghie al carrello (che dalle immagini vedo che avviene su un lato) non si può' centrare, modificando il carrello (come la prusa i3 per intenderci)
da: ______[carrello]_______
a: ---------[carrello]----------
graz
Ciao
Edited 1 time(s). Last edit at 04/24/2014 12:15PM by lexon.
Davide (che ringrazio per il mega post) indicava nella parte gialla il problema, ma usando dei pattini lineari come la soluzione postata da Enrico non si risolvono?
Se il problema è l'aggancio delle cinghie al carrello (che dalle immagini vedo che avviene su un lato) non si può' centrare, modificando il carrello (come la prusa i3 per intenderci)
da: ______[carrello]_______
a: ---------[carrello]----------
graz
Ciao
Edited 1 time(s). Last edit at 04/24/2014 12:15PM by lexon.
|
Re: corexy variante April 24, 2014 01:22PM |
Registered: 10 years ago Posts: 388 |
[joshuavasquez.com]
questo schema dice tutto
comuqnue solo i pattini non bastano l'asse x deve essere rigido ( tipo barra di alluminio) e le tolleranze ridotte al massimo
Edited 2 time(s). Last edit at 04/24/2014 01:25PM by mic.
questo schema dice tutto
comuqnue solo i pattini non bastano l'asse x deve essere rigido ( tipo barra di alluminio) e le tolleranze ridotte al massimo
Edited 2 time(s). Last edit at 04/24/2014 01:25PM by mic.
|
Re: corexy variante April 24, 2014 05:34PM |
Registered: 10 years ago Posts: 101 |
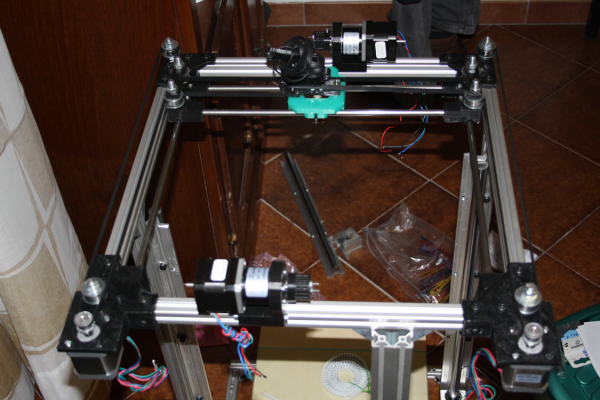
per quanto riguarda il mio progetto lo sto disegnando, non sto scaricando file da internet sto cercando di dimensionarlo.
-Le guide verticali appoggiano su un piano rigido e quindo non possono flettere.
-La barra orizzontale è fatta da una guida molto rigida. Ho fatto dei calcoli per le flessioni in merito a barre da 8 e considerando un peso di 1 kg al carrello
le flessioni ci sono. Per questo ho optato per una guida molto robusta che fà da ponte.La sua flessione è pari a qualcosa di molto prossimo a nulla
-Per quanto riguarda le flessioni provo a spiegarmi. Ammesso che le guide verticali abbiano un gioco di 0.01 0.02 sui ~100mm di guida l'inclinazione massima
che avrebbe il "ponte" è di un massimo di 0.04 o 0.08 sui 400mm. Ragionando su spostamenti più piccoli, i soliti che si hanno, si può prendere
in considerazione una porzione di movimento ad esempio di 50 mm a questo punto i giochi sono trascurabili.
Pensiamo ora all'infill quindi cambi di rotazione repentini in diagonale. Nel caso peggiore penso che per movimenti alternati di 0.2 il carrello si muova di 0.2 - il gioco che la struttura concede.
A questo punto vi chiedo di spiegarmi bene cosa intendete, la torsione è relativa al sistema o alle cinghie.
-Enricodare quanto parli di torsione cosa intendi di preciso? Se riesci a spiegarmi bene sarei felice in quanto vorrei fugare il dubbio o convincermi del problema
-Mic puoi mandarmi un immagine del sistema che ti ha dato torsioni? Non ho capito nello schema cosa dovrebbe torcere: le guide?
Vorrei chiarire bene questa cosa prima di iniverstire soldoni in quella che considero l'evoluzione della mia prima stampante e trovarmi una bella sorpresona
-Le guide verticali appoggiano su un piano rigido e quindo non possono flettere.
-La barra orizzontale è fatta da una guida molto rigida. Ho fatto dei calcoli per le flessioni in merito a barre da 8 e considerando un peso di 1 kg al carrello
le flessioni ci sono. Per questo ho optato per una guida molto robusta che fà da ponte.La sua flessione è pari a qualcosa di molto prossimo a nulla
-Per quanto riguarda le flessioni provo a spiegarmi. Ammesso che le guide verticali abbiano un gioco di 0.01 0.02 sui ~100mm di guida l'inclinazione massima
che avrebbe il "ponte" è di un massimo di 0.04 o 0.08 sui 400mm. Ragionando su spostamenti più piccoli, i soliti che si hanno, si può prendere
in considerazione una porzione di movimento ad esempio di 50 mm a questo punto i giochi sono trascurabili.
Pensiamo ora all'infill quindi cambi di rotazione repentini in diagonale. Nel caso peggiore penso che per movimenti alternati di 0.2 il carrello si muova di 0.2 - il gioco che la struttura concede.
A questo punto vi chiedo di spiegarmi bene cosa intendete, la torsione è relativa al sistema o alle cinghie.
-Enricodare quanto parli di torsione cosa intendi di preciso? Se riesci a spiegarmi bene sarei felice in quanto vorrei fugare il dubbio o convincermi del problema
-Mic puoi mandarmi un immagine del sistema che ti ha dato torsioni? Non ho capito nello schema cosa dovrebbe torcere: le guide?
Vorrei chiarire bene questa cosa prima di iniverstire soldoni in quella che considero l'evoluzione della mia prima stampante e trovarmi una bella sorpresona
|
Re: corexy variante April 24, 2014 05:36PM |
Registered: 10 years ago Posts: 137 |
Premetto che faccio fatica a trovare info su google... non riesco a comporre dei termini di ricerca corretti....
Cmq il problema è l'elasticità della cinghia, corretto? è per questo che sul tubo trovo spesso dei video che utilizzano filo di naylon (tipo pesca)?
non è possibile ricondurre la "logica" del hbot sostituendo le cinghie a degli ingranaggi meccanici?
cmq grazie per il chiarimento, è proprio vero ce un'immagine vale più di mille parole!
Cia
PS: grazie ancora Davide, ottimo chiarimento.
Edited 1 time(s). Last edit at 04/24/2014 05:45PM by lexon.
Cmq il problema è l'elasticità della cinghia, corretto? è per questo che sul tubo trovo spesso dei video che utilizzano filo di naylon (tipo pesca)?
non è possibile ricondurre la "logica" del hbot sostituendo le cinghie a degli ingranaggi meccanici?
cmq grazie per il chiarimento, è proprio vero ce un'immagine vale più di mille parole!
Cia
PS: grazie ancora Davide, ottimo chiarimento.
Edited 1 time(s). Last edit at 04/24/2014 05:45PM by lexon.
|
Re: corexy variante April 24, 2014 05:36PM |
Registered: 10 years ago Posts: 132 |
Prego, se un mio post piace, mi fa contento, se permette di approfondire un argomento e aiutare più persone, allora ad essere conteno non sarò soltanto io.Quote
lexon
.........Davide (che ringrazio per il mega post) ..........
Errore mio, l'immagine suggerita da mic e presa da questa pagina A Core-XY Implementation chiarisce cosa può "andare storto". Ho modificato l'immagine aggiungendo qualche freccia e qualche colore.Quote
lexon
Torsioni cosa intendete di preciso e dove?
Davide ............ indicava nella parte gialla il problema.........

La porzione evidenziata in arancione rappresenta il "carrello" dell'asse X ed è lui a subire una torsione e a disallinearsi creando impuntamenti (soprattutto nei momenti di cambio di direzione).
Quando le pulegge motrici (indicate dalla M rossa) si muovono come da direzione indicata, creano due forze T (Indicate dalla T verde) con direzioni parallele ma versi opposti (perché una va da Sud verso Nord e l'altra va da Nord verso Sud).
Queste forze transitano sul carrello dell'asse X (quello in arancione) attraverso i cuscinetti che proprio sul carrello dell'asse X sono installati. La cinghia di movimentazione (in violetto) ha una leggera elasticità quindi sarà tesa nelle zone dove sono presenti le forze T e sarà leggermente "lasca" nelle zone meno soggette alle forze T (e simboleggiate dalla freccia blu serpeggiante).
La piccola porzione delle forze T contrapposte che (attraverso i cuscinetti) si scarica sul "carrello" dell'asse X porta a creare una torsione che genera (rispetto all'immagine descritta) una rotazione in senso orario dell'intero "carrello" dell'asse X come indicato dalle due frecce rosse vicino al "carrello" dell'asse X colorato di arancione.
Ecco un altro esempio, preso da qui Mondrian build thread iquizzle descrive i risultati dei suoi test; anche se i motori sono messi in modo diverso i problemi non spariscono, la freccia presente sopra lo schema di destra mostra il movimento rotatorio del "carrello" dell'asse X

Leggendo il topic Mondrian build thread nel post di iquizzle si legge:Quote
lexon
.........ma usando dei pattini lineari come la soluzione postata da Enrico non si risolvono?..........
This mainly manifests itself in small angle rotation of the linear rods permitted by the clearance of the bearings.
Questo (la torsione) si manifesta principalmente come una piccola rotazione angolare delle barre lineari, (torsione) resa possibile dalla tolleranza (dimensionale) dei cuscinetti
The resulting distortion is easiest seen by elliptical shapes along the 45 degree directions when printing circles.
La distorsione risultante è più facilmente visibile come una deformazione ellittica lungo le direzioni a 45 ° (quindi le diagonali della struttura della stampante) quando si stampano cerchi
I have *mostly* eliminated h-bot distortion on the UConduit h-bot by:
Ho eliminato "per la maggior parte" le distorsione dell'H-Bot sul "UConduit h-bot" (il modello di stampante su cui sta sperimentando e visibile qui Uconduit) con (questi interventi)
- spacing the outside bearings farther apart
- distanziando i cuscinetti esterni il più lontano possibile (gli uni dagli altri)
- using LME8UU adjustable bearings and applying tension on them to reduce clearance to the rods
- usando cuscinetti regolabili LME8UU e applicando ad essi tensione per ridurre la tolleranza (lo spazio di oscillazione possibile) con le barre (lisce di scorrimento)
- replacing LM8UUs with LML8UUs
- sostiruendo gli LM8UU con gli LML8UU (non sono andato a guardarmi a quali elementi meccanici corrispondano queste sigle)
Quindi il problema non è nell'aggancio delle cinghie (come il mio precedente intervento poteva indurre a pensare).Quote
lexon
..........Se il problema è l'aggancio delle cinghie al carrello (che dalle immagini vedo che avviene su un lato) non si può' centrare, modificando il carrello (come la prusa i3 per intenderci)
...........
Edited 2 time(s). Last edit at 04/24/2014 05:47PM by Davide (Aqua Dulza).
|
Re: corexy variante April 24, 2014 06:18PM |
Registered: 10 years ago Posts: 137 |
questo setup lo avevate già visto?
[www.youtube.com]
che sembra essere questo: [capolight.wordpress.com]
Ciao
Edited 1 time(s). Last edit at 04/24/2014 06:34PM by lexon.
[www.youtube.com]
che sembra essere questo: [capolight.wordpress.com]
Ciao
Edited 1 time(s). Last edit at 04/24/2014 06:34PM by lexon.
|
Re: corexy variante April 24, 2014 07:14PM |
Registered: 10 years ago Posts: 101 |
ok quindi:
-il problema è la rotazione dell'intero carro x come dicevo prima aumentato nell'infill o come nel post di Davide accentuato nei cerchi
-un secondo problema potrebbe essere la perdita di tensione della cinghia ma questo puo essere comune anche alle altre applicazioni
Il sistema che hai postato Davide (grazie) và però considerato in base alla sua meccanica cioè parti in plastica e manicotti a sfere tralaltro posti sembrerebbe a 50 -60 mm in Y :più si allarga quella misura meno ruota l'asse x. Se si portasse a 100 la rotazione dell'asse si dimezza e questo è geometrico.
Il sistema ad esempio tipo bucaneer per prenderne uno sono guide lineari con pattini avvitati su una piastra, è un'altra cosa.
Enricodare : che impressioni hai di un sistema tipo bucaneers che hai citato
-Mic puoi postare un immagine del sistema che ti ha dato torsioni? Per capirne la rigidità meccania
Dato che la stampante che mi sono costruito ha i pattini farò una prova:
È una stampante classica che porta a spasso il motore per l'assex. Ho un albero di torsione che porta le cinghie sia a destra che a sinistra per la y, sistema classicissimo.
Farò cosi , sgancio una cinghia in modo da portare avanti l'asse y spingendo solo da una parte in questo modo vado a forzare la torsione and ogni movimento in y.
Riaggancio la cinghia e poi ristampo lo stesso pezzo. Direi che è una prova limite
-il problema è la rotazione dell'intero carro x come dicevo prima aumentato nell'infill o come nel post di Davide accentuato nei cerchi
-un secondo problema potrebbe essere la perdita di tensione della cinghia ma questo puo essere comune anche alle altre applicazioni
Il sistema che hai postato Davide (grazie) và però considerato in base alla sua meccanica cioè parti in plastica e manicotti a sfere tralaltro posti sembrerebbe a 50 -60 mm in Y :più si allarga quella misura meno ruota l'asse x. Se si portasse a 100 la rotazione dell'asse si dimezza e questo è geometrico.
Il sistema ad esempio tipo bucaneer per prenderne uno sono guide lineari con pattini avvitati su una piastra, è un'altra cosa.
Enricodare : che impressioni hai di un sistema tipo bucaneers che hai citato
-Mic puoi postare un immagine del sistema che ti ha dato torsioni? Per capirne la rigidità meccania
Dato che la stampante che mi sono costruito ha i pattini farò una prova:
È una stampante classica che porta a spasso il motore per l'assex. Ho un albero di torsione che porta le cinghie sia a destra che a sinistra per la y, sistema classicissimo.
Farò cosi , sgancio una cinghia in modo da portare avanti l'asse y spingendo solo da una parte in questo modo vado a forzare la torsione and ogni movimento in y.
Riaggancio la cinghia e poi ristampo lo stesso pezzo. Direi che è una prova limite
|
Re: corexy variante April 25, 2014 06:22AM |
Registered: 10 years ago Posts: 101 |
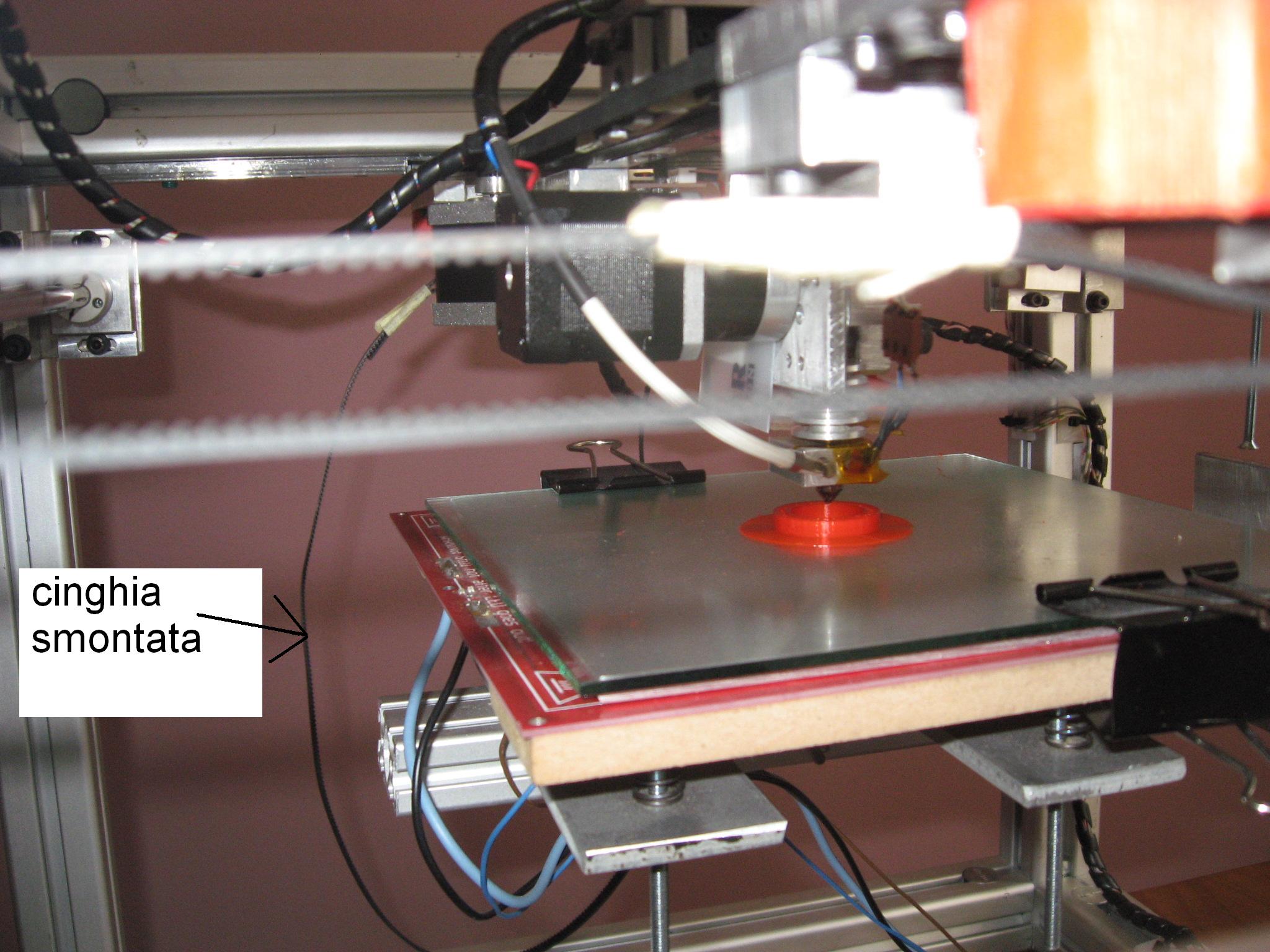
Sto facendo un po di prove ora.
Allego le immagini per farmi capire meglio.
L'asse x ~1.4kg e mosso solo dalla cinghia di destra. Ho tolto l'altra. Praticamente spingo solo da un lato.
Ditemi se secondo voi è valida per replicare la torsione.
Se avete consigli su cosa devo guardare o stampare per mettere in stress la macchina dite pure. Devo fare un pò di prove prima di costruire il mio primo hbot.
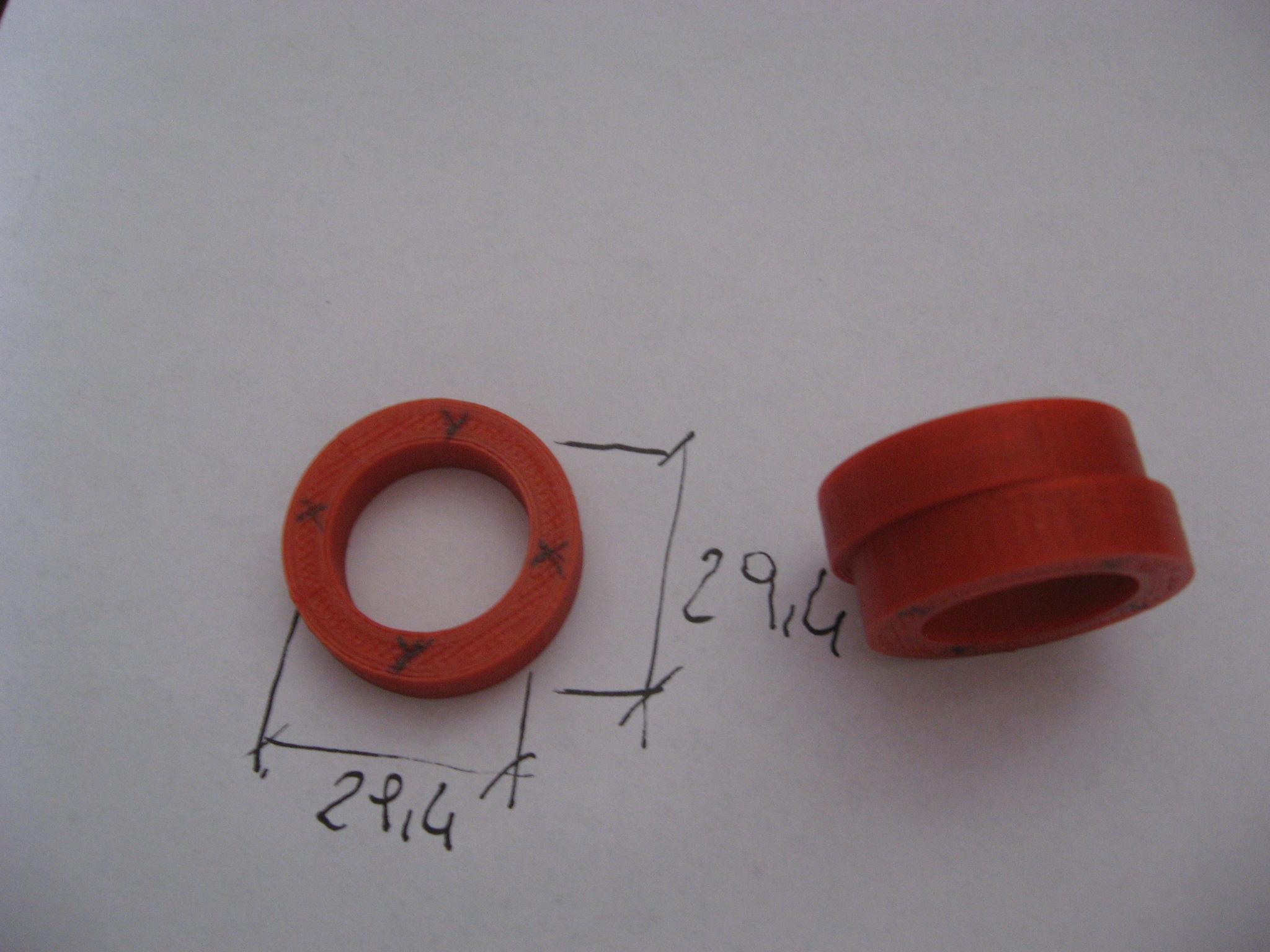
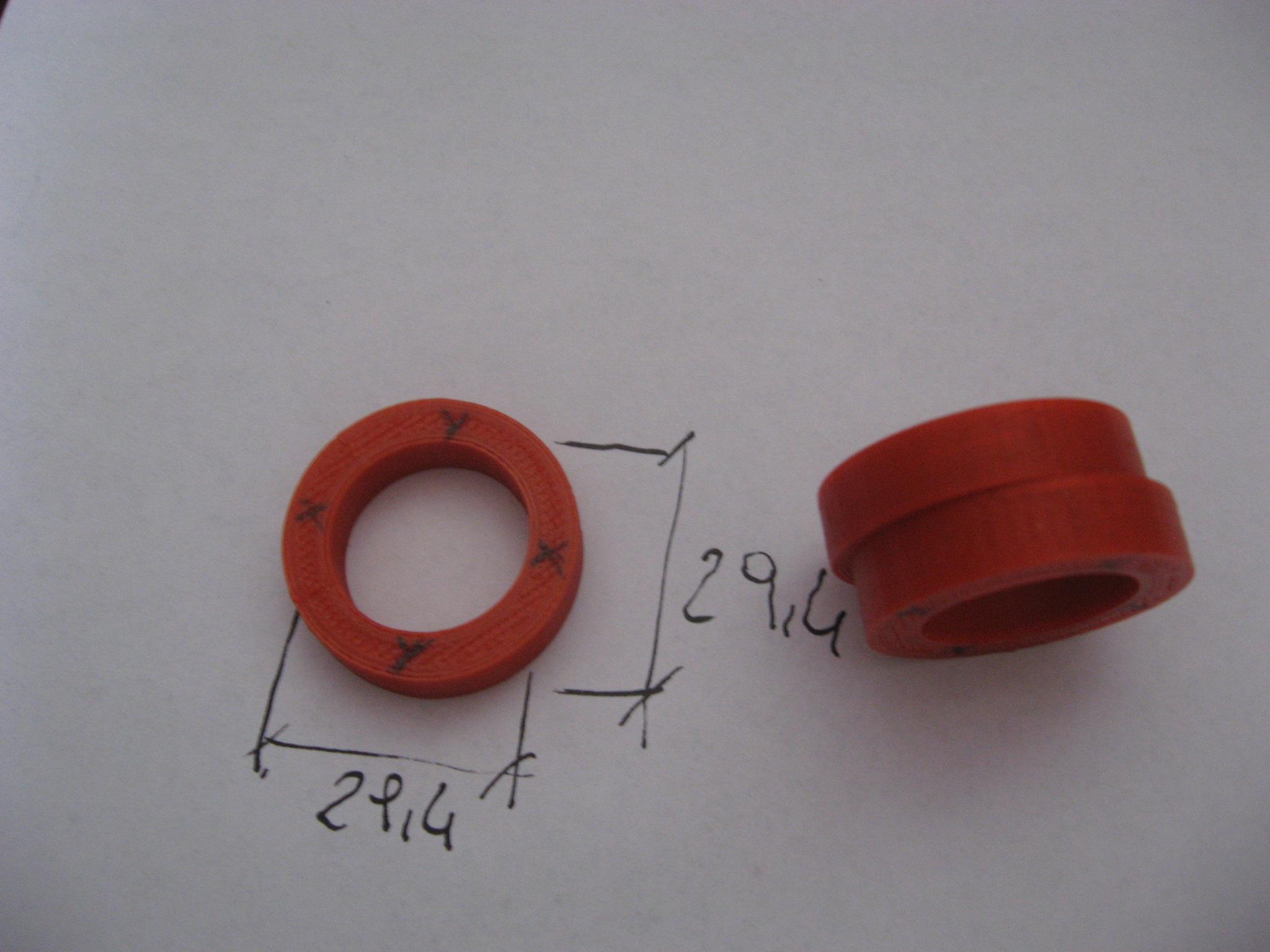
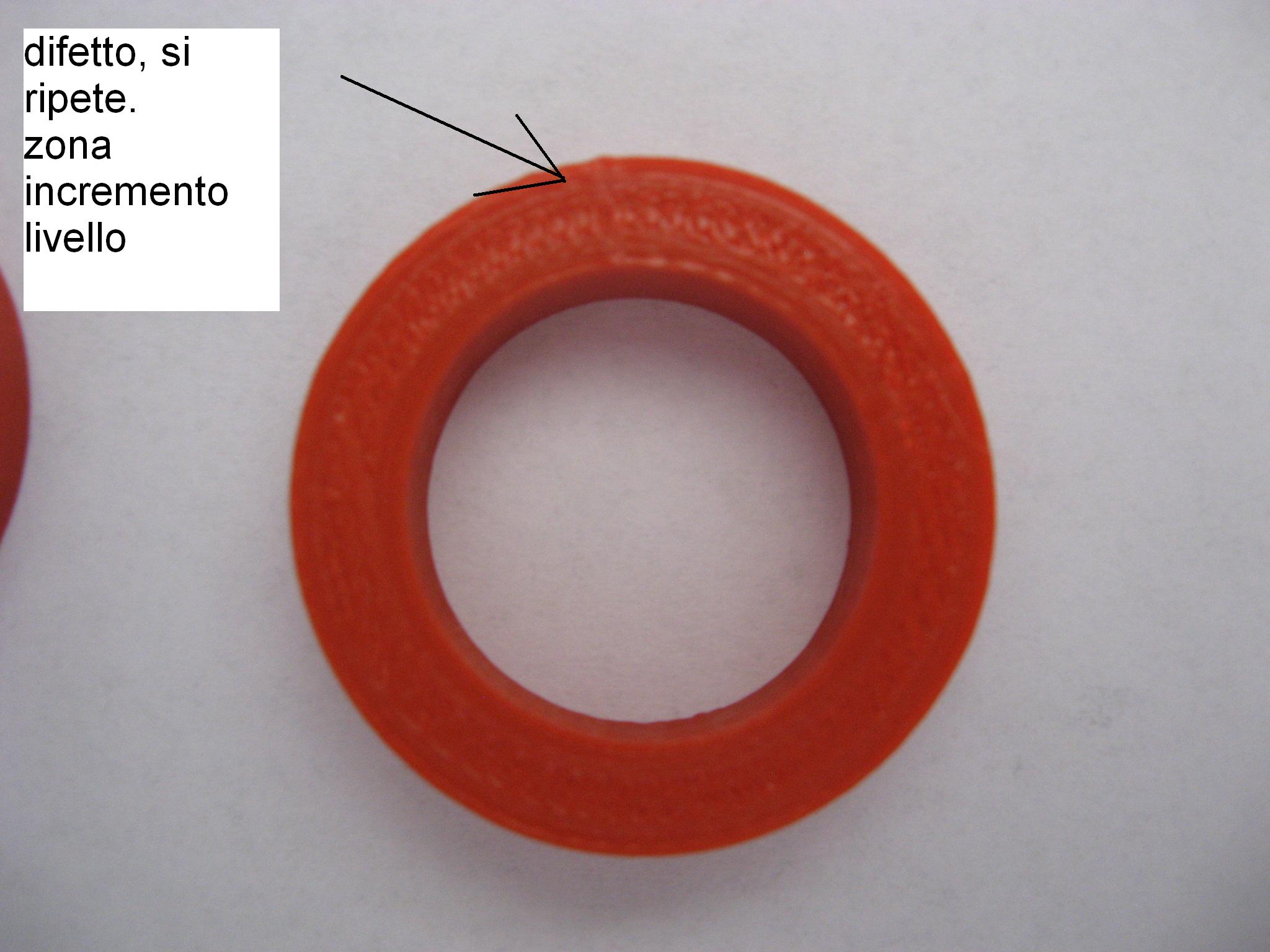
Le parti stampate sono circolari. Presentano un difetto tutte e tre nella zona dove incrementa di passo. in pratica si creano dei piccoli rilievi.
In quella zona la misura è maggiorata di 0.3 0.4 mm.
Se avete consigli su cosa devo guardare o stampare per mettere in stress la macchina dite pure. Devo fare un pò di prove prima di costruire il mio primo hbot.
Allego le immagini per farmi capire meglio.
L'asse x ~1.4kg e mosso solo dalla cinghia di destra. Ho tolto l'altra. Praticamente spingo solo da un lato.
Ditemi se secondo voi è valida per replicare la torsione.
Se avete consigli su cosa devo guardare o stampare per mettere in stress la macchina dite pure. Devo fare un pò di prove prima di costruire il mio primo hbot.
Le parti stampate sono circolari. Presentano un difetto tutte e tre nella zona dove incrementa di passo. in pratica si creano dei piccoli rilievi.
In quella zona la misura è maggiorata di 0.3 0.4 mm.
Se avete consigli su cosa devo guardare o stampare per mettere in stress la macchina dite pure. Devo fare un pò di prove prima di costruire il mio primo hbot.
|
Re: corexy variante April 25, 2014 07:48AM |
Registered: 10 years ago Posts: 14 |
Bravo Fuma
C'è una stampante 3D italiana la MakerDremas che l'ha adottato da mesi.
E' favoloso come sistema sono stati bravi è preciso e compatto. Lo userò anche io per la mia.
[www.makerdreams.net]
C'è una stampante 3D italiana la MakerDremas che l'ha adottato da mesi.
E' favoloso come sistema sono stati bravi è preciso e compatto. Lo userò anche io per la mia.
[www.makerdreams.net]
|
Re: corexy variante April 25, 2014 08:42AM |
Registered: 10 years ago Posts: 101 |
Si diciamo che il sistema obbliga ad una meccanica precisa perchè il momento torcente cè per definizione.
potrebbe arrecare un'usura anticipata ma è tutto da vedere.
Un sistema che elimina le torsioni che si sta cercando qui ha il vantaggio di agevolare la meccanica e portare a livelli precisi una meccanica leggermente inferiore, almeno questo è quello che penso.
Quindi un sistema non hbot può essere utile a chi sviluppa la propria stampante con tondi rettificati e manicotti a sfere
Faccio un OT
Ho visto il sito che di quella stampante e come per molte molte altre sarebbero tutti da prendere a calci nel ...... per le risoluzioni che esprimono ma non hanno
Sono a stato anche a parma in fiera e ho fatto presente alla makerbot che i valori di targa non sono corrett( non ho poi calcato la mano perchè chi vende alla fine è un ragazzo/a che si guadagna la pagnotta) ma scusate correggetemi se sbaglio:
1= puleggia gt2 dp= 13.73 c=13.73*3.14= 43mm 43/200 (step)= 0.215 0.215/16 (le divisioni... tutte da dimostrare)= 0.0135mm
Ai 0.0135 calcolati aggiungiamo 0.02 0.03 per la meccanica (non cosideriamo le cinghie và, facendo un fioretto siamo buoni perchè è appena passata Pasqua) si hanno 0.04
Sistemi del genere Hbot Ibot sono venduti in ambito industriale da anni e danno 0.05 (anche con encoder e compagnia bella) e sono onesti, chi dice meno per qualsiasi stampante per me mente lo fà per vedere e adeguarsi alle balle altrui.
Ma senza fare tanti calcoli : per avere i centesimi in risoluzione si vogliono i micron in definizione: loro non li hanno.
Altro esempio un sistema brushless con encoder con encoder seri (un motore più azionamento costa come una stampante) con viti a ricircolo di sfere danno +-0.01 o spesso +-0.02
Scusate lo sfogo ma quanto vedo valori 0.01 vabbè mi gira il sangue al contrario
Fine OT
potrebbe arrecare un'usura anticipata ma è tutto da vedere.
Un sistema che elimina le torsioni che si sta cercando qui ha il vantaggio di agevolare la meccanica e portare a livelli precisi una meccanica leggermente inferiore, almeno questo è quello che penso.
Quindi un sistema non hbot può essere utile a chi sviluppa la propria stampante con tondi rettificati e manicotti a sfere
Faccio un OT
Ho visto il sito che di quella stampante e come per molte molte altre sarebbero tutti da prendere a calci nel ...... per le risoluzioni che esprimono ma non hanno
Sono a stato anche a parma in fiera e ho fatto presente alla makerbot che i valori di targa non sono corrett( non ho poi calcato la mano perchè chi vende alla fine è un ragazzo/a che si guadagna la pagnotta) ma scusate correggetemi se sbaglio:
1= puleggia gt2 dp= 13.73 c=13.73*3.14= 43mm 43/200 (step)= 0.215 0.215/16 (le divisioni... tutte da dimostrare)= 0.0135mm
Ai 0.0135 calcolati aggiungiamo 0.02 0.03 per la meccanica (non cosideriamo le cinghie và, facendo un fioretto siamo buoni perchè è appena passata Pasqua) si hanno 0.04
Sistemi del genere Hbot Ibot sono venduti in ambito industriale da anni e danno 0.05 (anche con encoder e compagnia bella) e sono onesti, chi dice meno per qualsiasi stampante per me mente lo fà per vedere e adeguarsi alle balle altrui.
Ma senza fare tanti calcoli : per avere i centesimi in risoluzione si vogliono i micron in definizione: loro non li hanno.
Altro esempio un sistema brushless con encoder con encoder seri (un motore più azionamento costa come una stampante) con viti a ricircolo di sfere danno +-0.01 o spesso +-0.02
Scusate lo sfogo ma quanto vedo valori 0.01 vabbè mi gira il sangue al contrario
Fine OT
|
Re: corexy variante April 25, 2014 09:02AM |
Registered: 10 years ago Posts: 101 |
Torno alle prove ancora calde di stampa
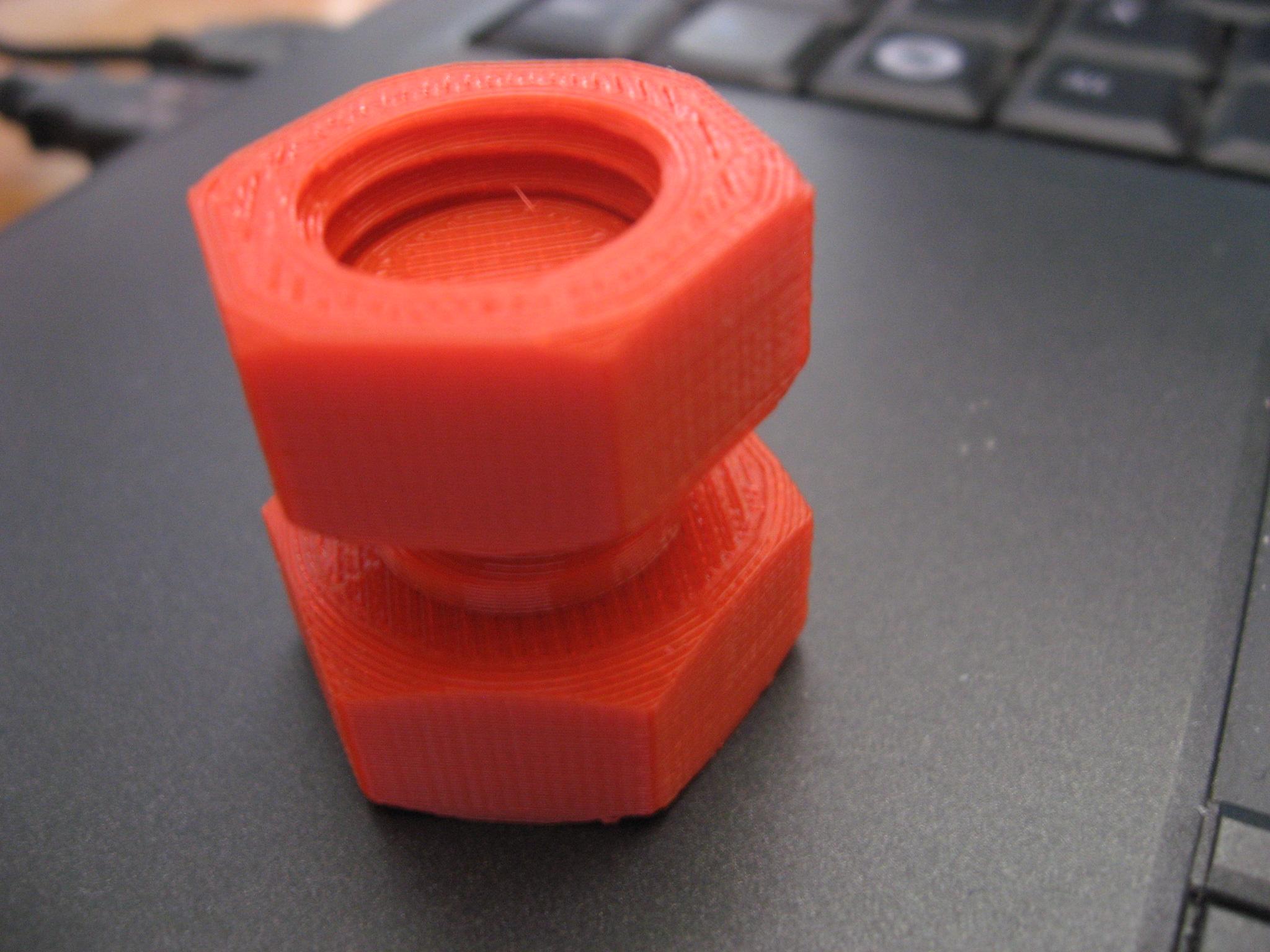
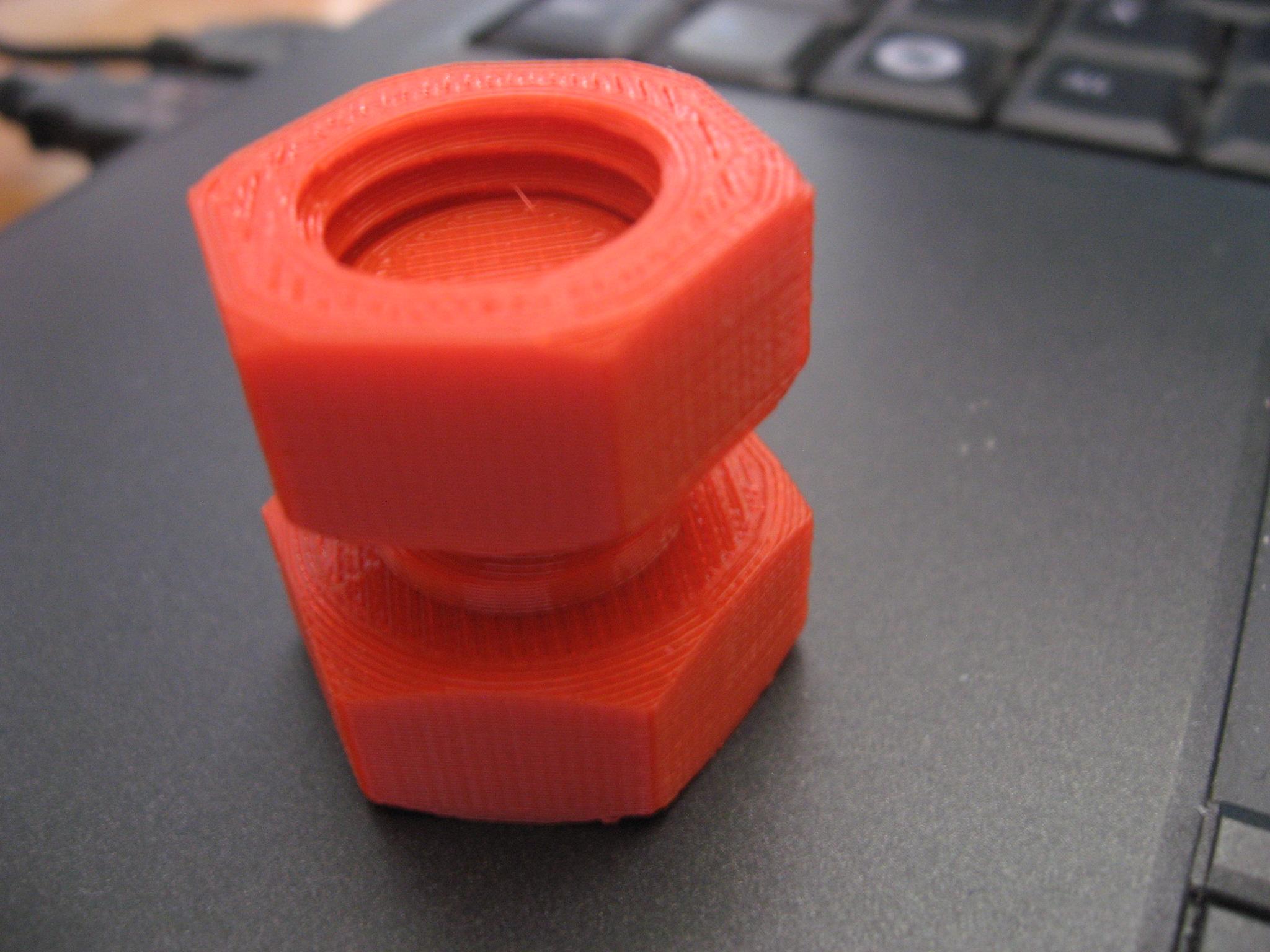
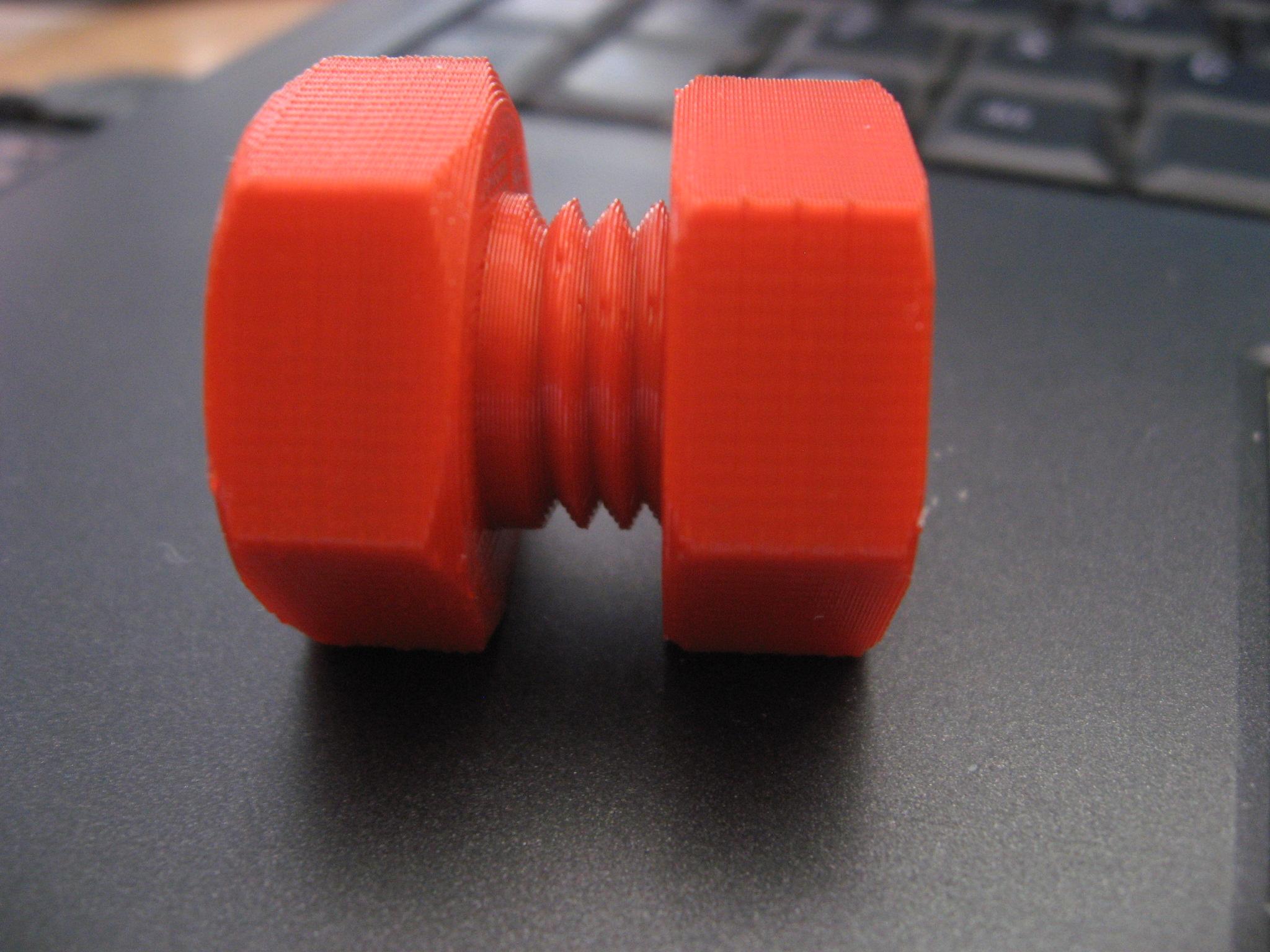
Ci sono dei difetti però la vite si avvita nel dado.
Stampa ugello 0.5 layer 0.2 pla (dovrei decidermi a mettere la ventola per raffreddarlo..)
Penso di andare avanti con il mio progetto ma cercherò di fare altri dimensionamenti più conservativi perchè la torsione c'è.
Se avete test da proporre sono a disposizione, lascio la cinghia smontata e tiro il carro solo da un lato per creare le torsioni.
Torno al Cad.....
Ci sono dei difetti però la vite si avvita nel dado.
Stampa ugello 0.5 layer 0.2 pla (dovrei decidermi a mettere la ventola per raffreddarlo..)
Penso di andare avanti con il mio progetto ma cercherò di fare altri dimensionamenti più conservativi perchè la torsione c'è.
Se avete test da proporre sono a disposizione, lascio la cinghia smontata e tiro il carro solo da un lato per creare le torsioni.
Torno al Cad.....
|
Re: corexy variante April 25, 2014 10:36AM |
Registered: 10 years ago Posts: 388 |
|
Re: corexy variante April 25, 2014 10:57AM |
Registered: 10 years ago Posts: 14 |
 preferisco guardare il risultato finale di stampa.
preferisco guardare il risultato finale di stampa. |
Re: corexy variante April 25, 2014 12:10PM |
Registered: 10 years ago Posts: 101 |
Il discorso dei calcoli era solo una mia opinione , ho solo cercato di argomentare il ragionamento ed era esteso ad ogni stampante esistente non ad un sistema specifico.
Ad esempio la stampante che hai linkato per me funziona bene ed è pure bella per intenderci.Anche la bucanners a me piace. Ma lo 0.01 è fumo commerciale di tutte le marche intendevo solo quello
Le prove che ho fatto stamattina simulano la torsione (se spingi solo da un lato l'asse x dovrebbe imbarcarsi) mi dicono che posso andare avanti con hbot, per quello chiedevo
indicazioni su altre prove da fare per evidenziare il problema perchè non si è manifestato tanto da darmi fastidio. Le stampe degli anelli e della vite che si avvita bene erano per verificare
se il cerchio tendeva a diventare ellisse (vedi i post precedenti) ma così non è stato. Poco sopra ho chiuso dicendo che con alcune modifche (soldi permettendo) finirò il progetto con Hbot.È già un mese che ci lavoro...
Non si dice che sia pessimo ma che per la sua applicazione ci volgliono degli accorgimenti tutto li.
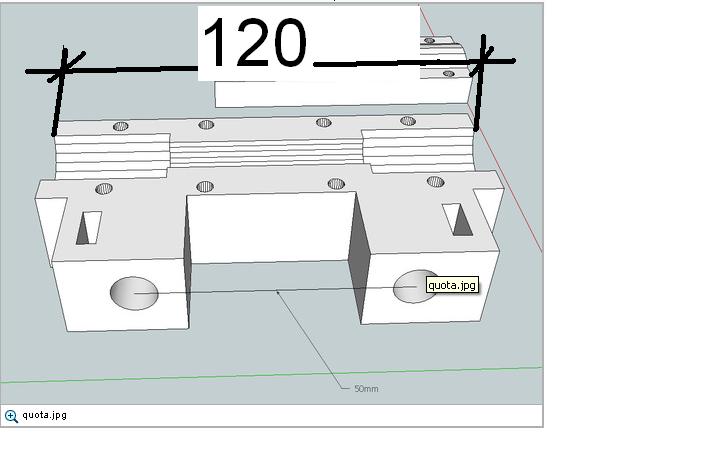
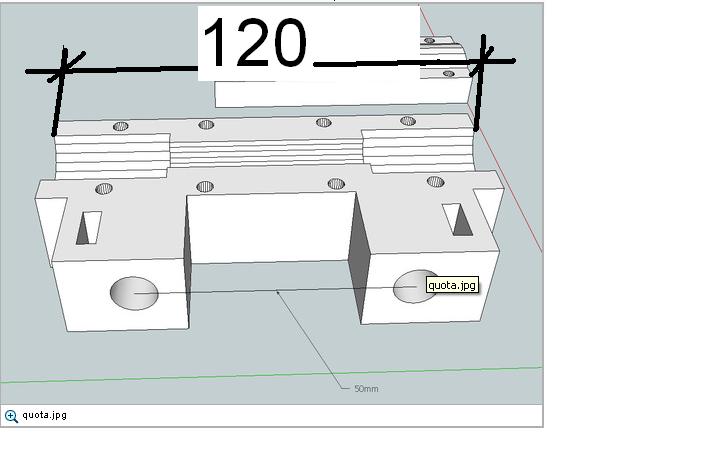
Xmic: complimenti ti stai facendo un mazzo tanto. Le plastiche e la struttura mi piacciono. Che distanza hai fra l'inizio di un manicotto e l'altro, dalla foto sembrano 60mm sai dirmi di più?I
Ad esempio la stampante che hai linkato per me funziona bene ed è pure bella per intenderci.Anche la bucanners a me piace. Ma lo 0.01 è fumo commerciale di tutte le marche intendevo solo quello
Le prove che ho fatto stamattina simulano la torsione (se spingi solo da un lato l'asse x dovrebbe imbarcarsi) mi dicono che posso andare avanti con hbot, per quello chiedevo
indicazioni su altre prove da fare per evidenziare il problema perchè non si è manifestato tanto da darmi fastidio. Le stampe degli anelli e della vite che si avvita bene erano per verificare
se il cerchio tendeva a diventare ellisse (vedi i post precedenti) ma così non è stato. Poco sopra ho chiuso dicendo che con alcune modifche (soldi permettendo) finirò il progetto con Hbot.È già un mese che ci lavoro...
Non si dice che sia pessimo ma che per la sua applicazione ci volgliono degli accorgimenti tutto li.
Xmic: complimenti ti stai facendo un mazzo tanto. Le plastiche e la struttura mi piacciono. Che distanza hai fra l'inizio di un manicotto e l'altro, dalla foto sembrano 60mm sai dirmi di più?I
|
Re: corexy variante April 25, 2014 12:54PM |
Registered: 10 years ago Posts: 388 |
ti ringrazio
dal centro al centro sono 50mm come nelle stampanti i2
comunque altre foto le ho nell'altro thread
[forums.reprap.org]
Edited 3 time(s). Last edit at 04/25/2014 01:01PM by mic.
dal centro al centro sono 50mm come nelle stampanti i2

comunque altre foto le ho nell'altro thread
[forums.reprap.org]
Edited 3 time(s). Last edit at 04/25/2014 01:01PM by mic.
|
Re: corexy variante April 25, 2014 01:19PM |
Registered: 10 years ago Posts: 101 |
|
Re: corexy variante April 25, 2014 01:29PM |
Registered: 10 years ago Posts: 14 |
|
Re: corexy variante April 25, 2014 01:42PM |
Registered: 10 years ago Posts: 388 |
|
Re: corexy variante April 25, 2014 06:20PM |
Registered: 11 years ago Posts: 514 |
Quote
Fuma
Sistemi del genere Hbot Ibot sono venduti in ambito industriale da anni e danno 0.05 (anche con encoder e compagnia bella) e sono onesti, chi dice meno per qualsiasi stampante per me mente lo fà per vedere e adeguarsi alle balle altrui.
Ma senza fare tanti calcoli : per avere i centesimi in risoluzione si vogliono i micron in definizione: loro non li hanno.
Altro esempio un sistema brushless con encoder con encoder seri (un motore più azionamento costa come una stampante) con viti a ricircolo di sfere danno +-0.01 o spesso +-0.02
Scusate lo sfogo ma quanto vedo valori 0.01 vabbè mi gira il sangue al contrario
Fine OT
Tutto e' relativo.
0.05 ottenuti con encoder+brushless sono ottimi, se il tuo sistema e' ottenuto con parti in alluminio strutturale (=estrusi vari) ma sono pessimi se usi meccanica ad hoc.
Idem per movimenti a vite a ricircolo. Dipende. Se usi viti C3 o C10, cinesi o tedesche, singole oppure doppie (una per lato della tavola).
Per quel che ci riguarda, i micron ci sono, e sono ottenuti con cinghie GT2 carbon e puleggie Gt2 made in Italy ( i numeri sono la profondita' delle cifre in micron):

Salute
Davide
PS.: la foto sopra e' ottenuta con meccaniche appoggiate su manicotti IGUS. La prossima versione (guide a ricircolo) sara' ben piu' precisa :-)
Edited 3 time(s). Last edit at 04/25/2014 06:22PM by 3ntrlab.
==============================
no toys here...sorry
|
Re: corexy variante April 26, 2014 04:31AM |
Registered: 10 years ago Posts: 101 |
Ciao complimenti per le stampe.
Consideriamo un solo asse per volta,se poi li abbini in un xy dobbiamo aumentare un pò le tolleranze:
-guide con pattini a ricircolo + vite di trasmissione a ricircolo: di solito danno +-0.02 o +-0.01
-Guide con pattini a ricircolo + cinghia (ancheGT): di solito sono a +-0.05 fino a 0.02
Ti posto alcuni link :
--questa è una serie precisa : [www.intelligentactuator.com]
qui abbiamo guide di qualità top a ricircolo montate in coppia con vite a ricircolo che spinge in centro : +- 0.005 un asse se li abbini dichiarerai +-0.01( che è tanta roba)
--Piccolo portale xy: [www.intelligentactuator.com]
Poi ce ne sono altri se cerchi in internet.
Ho sfogliato alcuni cataloghi e ho sempre trovato il +-0.01 (senza cinghie)in condizioni di alta precisione e avere un portale xy che già fa +-0.02 èdi solito ottimo.
Uscendo dalle stampanti 3d prova a trovare qualcuno che dichiara di avere un portale XY a ripetibilità +-0.01 azionato a cinghie. Se lo trovi fammi un fischio che si
possono paragonare quel prodotto ad una stampante
Poi magari ho preso un granchio, farrò ammenda e ne escerò accresciuto
Consideriamo un solo asse per volta,se poi li abbini in un xy dobbiamo aumentare un pò le tolleranze:
-guide con pattini a ricircolo + vite di trasmissione a ricircolo: di solito danno +-0.02 o +-0.01
-Guide con pattini a ricircolo + cinghia (ancheGT): di solito sono a +-0.05 fino a 0.02
Ti posto alcuni link :
--questa è una serie precisa : [www.intelligentactuator.com]
qui abbiamo guide di qualità top a ricircolo montate in coppia con vite a ricircolo che spinge in centro : +- 0.005 un asse se li abbini dichiarerai +-0.01( che è tanta roba)
--Piccolo portale xy: [www.intelligentactuator.com]
Poi ce ne sono altri se cerchi in internet.
Ho sfogliato alcuni cataloghi e ho sempre trovato il +-0.01 (senza cinghie)in condizioni di alta precisione e avere un portale xy che già fa +-0.02 èdi solito ottimo.
Uscendo dalle stampanti 3d prova a trovare qualcuno che dichiara di avere un portale XY a ripetibilità +-0.01 azionato a cinghie. Se lo trovi fammi un fischio che si
possono paragonare quel prodotto ad una stampante
Poi magari ho preso un granchio, farrò ammenda e ne escerò accresciuto
|
Re: corexy variante April 26, 2014 10:49AM |
Registered: 11 years ago Posts: 514 |
1) Senza andare a spulciare cose turche, ho sottomano il catalogo Misumi (guide piccole).
il gioco radiale (quindi il lasco dei pattini sulla guida) e' di 0..3 MICRON per le guide con leggero precarico e di 0..15 MICRON per quelle intercambiabili (quindi il carrello non e' precaricato).
2) In qualsiasi sistema che non sia a sbalzo, hai degli assi gemellati (aka gantry) che all'atto del montaggio vengono implicitamente irrigiditi reciprocamente. Siano essi stile Makerbot - HBOT - COREXY (gantry) o Ultimaker (doppio gantry) .
Il pasticcio della torsione nei sistemi HBOT salta fuori quando la "trave mobile" viaggia su sistemi poco rigidi (i.e.: boccole fissate con fascette) che lasciano ampia strada ai moti torsionali.
3) Gantry a cinghie solitamente sono utilizzati industrialmente per fare cose tipo sistemi pick and place oppure taglio laser/waterjet di bassa qualita'. Quindi logicamente e' difficile trovare sistemi comandati a cinghia precisi.
4) Spaccare il capello parlando di micron comunque lascia tutto il tempo che vuoi, quando poi ci troviamo a confrontarci con filamenti che QUANDO VA BENE tengono i 0.05 MM di tolleranza :-) e la composizione chimica costante e' nella maggior parte dei casi PURA UTOPIA :-)
5) Non fare ammenda, prova ! :-)
Ciao
Davide
==============================
no toys here...sorry
il gioco radiale (quindi il lasco dei pattini sulla guida) e' di 0..3 MICRON per le guide con leggero precarico e di 0..15 MICRON per quelle intercambiabili (quindi il carrello non e' precaricato).
2) In qualsiasi sistema che non sia a sbalzo, hai degli assi gemellati (aka gantry) che all'atto del montaggio vengono implicitamente irrigiditi reciprocamente. Siano essi stile Makerbot - HBOT - COREXY (gantry) o Ultimaker (doppio gantry) .
Il pasticcio della torsione nei sistemi HBOT salta fuori quando la "trave mobile" viaggia su sistemi poco rigidi (i.e.: boccole fissate con fascette) che lasciano ampia strada ai moti torsionali.
3) Gantry a cinghie solitamente sono utilizzati industrialmente per fare cose tipo sistemi pick and place oppure taglio laser/waterjet di bassa qualita'. Quindi logicamente e' difficile trovare sistemi comandati a cinghia precisi.
4) Spaccare il capello parlando di micron comunque lascia tutto il tempo che vuoi, quando poi ci troviamo a confrontarci con filamenti che QUANDO VA BENE tengono i 0.05 MM di tolleranza :-) e la composizione chimica costante e' nella maggior parte dei casi PURA UTOPIA :-)
5) Non fare ammenda, prova ! :-)
Ciao
Davide
==============================
no toys here...sorry
|
Re: corexy variante November 01, 2014 10:33AM |
Registered: 11 years ago Posts: 13 |
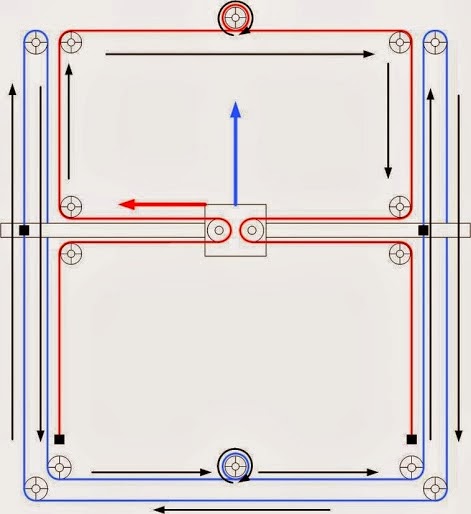
esiste anche questo tipo di schema
che non ha nulla a che fare con h-bot oppure corexy
in quanto un motore gestisce gli spostamenti sull'asse x
e l'altro i movimenti sull'asse y
quindi in sostanza e' una cartesiana classica
pero ha il grande vantaggio che i motori sono fermi
e quindi bassissime masse da movimentare
saluti
che non ha nulla a che fare con h-bot oppure corexy
in quanto un motore gestisce gli spostamenti sull'asse x
e l'altro i movimenti sull'asse y
quindi in sostanza e' una cartesiana classica
pero ha il grande vantaggio che i motori sono fermi
e quindi bassissime masse da movimentare
saluti
|
Re: corexy variante November 04, 2014 06:10AM |
Registered: 10 years ago Posts: 203 |
Quote
tecnomek
esiste anche questo tipo di schema
che non ha nulla a che fare con h-bot oppure corexy
in quanto un motore gestisce gli spostamenti sull'asse x
e l'altro i movimenti sull'asse y
quindi in sostanza e' una cartesiana classica
pero ha il grande vantaggio che i motori sono fermi
e quindi bassissime masse da movimentare
saluti
se non erro questo sistema riporta gli stessi problemi del hbot, ovvero della torsione del carrello.
con il sistema core xy non c'è modo di evitare gli incroci delle cinghie; o meglio, lo fai solo sfalsandole su due livelli e a quel punto gli puoi far fare tutti gli "incroci" che vuoi.
Motedis_kossel delta printer
Ramps1.4 for Due
|
Re: corexy variante February 28, 2015 01:18PM |
Registered: 9 years ago Posts: 4 |
|
Re: corexy variante February 28, 2015 03:07PM |
Registered: 10 years ago Posts: 203 |
|
Re: corexy variante February 28, 2015 03:29PM |
Registered: 9 years ago Posts: 3,268 |
tanto per chiarire: MarlinKimbra
trovi una guida nelle faq.
Edited 2 time(s). Last edit at 02/28/2015 03:51PM by bilanciamist.
Alessandro
Prusa I3 Rework molto modificata - Taurino Classic - Ramps 1.4 - Driver DVR8825 - Titan Extruder e Hotend E3D V6 - Bltouch originale - Firmware MarlinKimbra - Cura - Repetier Host
trovi una guida nelle faq.
Edited 2 time(s). Last edit at 02/28/2015 03:51PM by bilanciamist.
Alessandro
Prusa I3 Rework molto modificata - Taurino Classic - Ramps 1.4 - Driver DVR8825 - Titan Extruder e Hotend E3D V6 - Bltouch originale - Firmware MarlinKimbra - Cura - Repetier Host


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Sorry, only registered users may post in this forum.