Core XY vs Hbot Build
Posted by rikesh942010
|
Core XY vs Hbot Build May 10, 2017 03:33AM |
Registered: 6 years ago Posts: 9 |
Hi Guys,
I have never tried building a Hbot before but I heard from a lot of people that its not as good as Corexy.
is it mainly the racking of the gantry that people have a problem with.
I will be creating most of the parts using 5mm Aluminium so it will be very strong.
I simply need a design that would allow me to put the extruders in the front and the motors in the back, core xy system the belts come in the way. any suggestions?
Edited 1 time(s). Last edit at 05/11/2017 06:58AM by rikesh942010.
I have never tried building a Hbot before but I heard from a lot of people that its not as good as Corexy.
is it mainly the racking of the gantry that people have a problem with.
I will be creating most of the parts using 5mm Aluminium so it will be very strong.
I simply need a design that would allow me to put the extruders in the front and the motors in the back, core xy system the belts come in the way. any suggestions?
Edited 1 time(s). Last edit at 05/11/2017 06:58AM by rikesh942010.
|
Re: Core XY vs Hbot Build May 10, 2017 06:22AM |
Registered: 8 years ago Posts: 5,232 |
|
Re: Core XY vs Hbot Build May 10, 2017 01:13PM |
Registered: 11 years ago Posts: 335 |
CoreXY has both advantages and disadvantages when compared to the H-Bot belt path, but I think that in general it is overrated by hobbiysts. I prefer H-Bot to CoreXY.
Stratasys uses the H-Bot belt path in some of their printers, and H-Bots are also very common in high performance industrial systems (pick and place type stuff). In contrast, the CoreXY design is only found in very low cost hobbiyst builds.
If you are willing to build your printer with sufficient rigidity the H-Bot design is probably the superior choice.
An analogous situation is bowden vs direct drive extruders. Some people feel that bowden extruders produce better prints, but from a different perspective bowden is nothing more than a weight-saving measure. A direct drive extruder will perform better at the same speed/accelerations, its just that the printer will become much more expensive to carry the additional weight.
CoreXY and Bowden are smart choices when you want to build light and cheap, but are not the "best" design by any means.
Stratasys uses the H-Bot belt path in some of their printers, and H-Bots are also very common in high performance industrial systems (pick and place type stuff). In contrast, the CoreXY design is only found in very low cost hobbiyst builds.
If you are willing to build your printer with sufficient rigidity the H-Bot design is probably the superior choice.
An analogous situation is bowden vs direct drive extruders. Some people feel that bowden extruders produce better prints, but from a different perspective bowden is nothing more than a weight-saving measure. A direct drive extruder will perform better at the same speed/accelerations, its just that the printer will become much more expensive to carry the additional weight.
CoreXY and Bowden are smart choices when you want to build light and cheap, but are not the "best" design by any means.
|
Re: Core XY vs Hbot Build May 10, 2017 05:36PM |
Registered: 8 years ago Posts: 338 |
|
Re: Core XY vs Hbot Build May 10, 2017 06:22PM |
Registered: 7 years ago Posts: 249 |
CoreXY requires more math, which puts it out of most people's understanding.
Besides the standard CoreXY box, there are CoreXY "arms" that are used as 3dPrinters:
[www.youtube.com]
and plotters:
[www.youtube.com]
Edited 1 time(s). Last edit at 05/10/2017 06:34PM by prot0typ1cal.
Besides the standard CoreXY box, there are CoreXY "arms" that are used as 3dPrinters:
[www.youtube.com]
and plotters:
[www.youtube.com]
Edited 1 time(s). Last edit at 05/10/2017 06:34PM by prot0typ1cal.
|
Re: Core XY vs Hbot Build May 10, 2017 08:19PM |
Registered: 11 years ago Posts: 5,780 |
CoreXY doesn't require the user/builder to do any math. All common firmwares understand the mechanism and you simply tell it you're using a corexy mechanism and that's all you need to do. If you do get into the math, it's all simple linear stuff, nothing exotic like parabolic to Cartesian coordinate conversions, etc.
From what I have seen, most hobbyist coreXY builds tend to be better designs and builds than the more common i3 type machines, possibly because most first-timers build i3 type machines and few first-timers build CoreXY machines. Sure, CoreXY builders make some mistakes and cut some corners, but not like the i3 type Cartesian world where absolute rock bottom cost seems to be the prime objective.
Hbot is OK if you build it right, but that's the problem. Building it right requires minimizing play in the bearings to an almost extreme extent. I would never try to use end supported round guide rails to build an Hbot (but then I'm sort of picky and wouldn't use them for any other machine either) because the combo of play in the bearings and flex in the rails may be enough to cause the dreaded "racking" in which the undriven end of the X axis lags behind the driven end causing, at a minimum, print quality issues and possibly causing the mechanism to bind.
Ultra MegaMax Dominator 3D printer: [drmrehorst.blogspot.com]
From what I have seen, most hobbyist coreXY builds tend to be better designs and builds than the more common i3 type machines, possibly because most first-timers build i3 type machines and few first-timers build CoreXY machines. Sure, CoreXY builders make some mistakes and cut some corners, but not like the i3 type Cartesian world where absolute rock bottom cost seems to be the prime objective.
Hbot is OK if you build it right, but that's the problem. Building it right requires minimizing play in the bearings to an almost extreme extent. I would never try to use end supported round guide rails to build an Hbot (but then I'm sort of picky and wouldn't use them for any other machine either) because the combo of play in the bearings and flex in the rails may be enough to cause the dreaded "racking" in which the undriven end of the X axis lags behind the driven end causing, at a minimum, print quality issues and possibly causing the mechanism to bind.
Ultra MegaMax Dominator 3D printer: [drmrehorst.blogspot.com]
|
Re: Core XY vs Hbot Build May 30, 2017 10:42AM |
Registered: 11 years ago Posts: 335 |
Quote
Qdeathstar
Mr Numbers,
You are saying that for a given result, the coreXY costs less that an HBot. Doesn't that make the coreXY objectively better?
CoreXY is better for low cost builds, but if your build has no risk of racking then it has no advantages.
A coreXY build requires twice as many inside idlers, tensioners, and anchors in the belt path. Not a problem if you are using skate bearings and zip ties, but if you are doing it with double bearing toothed idlers etc it becomes very expensive.
If your build uses genuine linear guide with two well spaced blocks per rail I think H-Bot is superior. A rule of thumb is that the blocks centers should be seperated by at least half of the distance between rails.
I personally find the CoreXY layout to be quite inelegant and would rather add a few inches of linear rail (to prevent racking) than run two belts on different planes. If you plan on maintaining reasonable belt tension you can't really mount the idlers with screws and t-slot nuts either because they will tilt under load.
Edited 1 time(s). Last edit at 05/30/2017 10:42AM by 691175002.
|
Re: Core XY vs Hbot Build May 30, 2017 11:48AM |
Registered: 11 years ago Posts: 5,780 |
Have you built either a coreXY or H-bot printer?
Ultra MegaMax Dominator 3D printer: [drmrehorst.blogspot.com]
Ultra MegaMax Dominator 3D printer: [drmrehorst.blogspot.com]
|
Re: Core XY vs Hbot Build May 30, 2017 01:36PM |
Registered: 8 years ago Posts: 601 |
Quote
691175002
If your build uses genuine linear guide with two well spaced blocks per rail I think H-Bot is superior. A rule of thumb is that the blocks centers should be seperated by at least half of the distance between rails.
Is this cheaper then the idlers for CoreXY? Not that cost is my priority, but its the only point I can see in why you choose Hbot over CoreXY. All the other reasons are negated by good design choices. (eg, use of t slot nuts for idlers... Not a problem if your idlers are secured from both sides)
|
Re: Core XY vs Hbot Build May 30, 2017 03:28PM |
Registered: 11 years ago Posts: 5,780 |
Quote
691175002
CoreXY is better for low cost builds, but if your build has no risk of racking then it has no advantages.
A coreXY build requires twice as many inside idlers, tensioners, and anchors in the belt path. Not a problem if you are using skate bearings and zip ties, but if you are doing it with double bearing toothed idlers etc it becomes very expensive.
Are extra long linear guides with extra bearing blocks in an H-bot cheaper than building a coreXY mechanism with toothed pulleys? Is something wrong with using skate wheel bearings for pulleys (I'm getting great results)? Are smaller size and cost for the same print volume not considered advantages? What about moving mass? Those extra bearing blocks have to be connected together with something and that all adds a lot of print-speed moving mass to the mechanism. Increased moving mass leads to lower printing speeds for quality output.
Quote
691175002
If your build uses genuine linear guide with two well spaced blocks per rail I think H-Bot is superior. A rule of thumb is that the blocks centers should be seperated by at least half of the distance between rails.
What is superior about it?
Quote
691175002
I personally find the CoreXY layout to be quite inelegant and would rather add a few inches of linear rail (to prevent racking) than run two belts on different planes. If you plan on maintaining reasonable belt tension you can't really mount the idlers with screws and t-slot nuts either because they will tilt under load.
Well, yeah, that would be a dumb way to do it, and some people probably do it that way, but it's not the only way. There are probably a hundred ways to make a bad H-bot, too.
Ultra MegaMax Dominator 3D printer: [drmrehorst.blogspot.com]
|
Re: Core XY vs Hbot Build May 31, 2017 05:25PM |
Registered: 10 years ago Posts: 293 |
|
Re: Core XY vs Hbot Build June 12, 2017 12:11PM |
Registered: 11 years ago Posts: 335 |
I can't provide any definitive answers since there are so many other choices that need to be made. My view is that too many people consider H-Bot to be an inferior predecessor to CoreXY. Both designs have their place.
Any system with a single block per rail is unquestionably better as a CoreXY. If you are running two blocks in an H-Bot, the cost of a few extra inches of rail is negligible, and rigidity is always welcome. The alternative is to mount four idlers at two different heights along the back of of a CoreXY.
If anything, the competitive and cost pressures of industry make them more likely to choose the optimal solution.
Any system with a single block per rail is unquestionably better as a CoreXY. If you are running two blocks in an H-Bot, the cost of a few extra inches of rail is negligible, and rigidity is always welcome. The alternative is to mount four idlers at two different heights along the back of of a CoreXY.
Quote
I wouldn't necessarily assume that just because a "commercial" company does it, that it is done better. They have to worry about price points and profit margins.
If anything, the competitive and cost pressures of industry make them more likely to choose the optimal solution.
|
Re: Core XY vs Hbot Build June 13, 2017 04:37PM |
Registered: 8 years ago Posts: 601 |
Quote
691175002
I can't provide any definitive answers since there are so many other choices that need to be made. My view is that too many people consider H-Bot to be an inferior predecessor to CoreXY. Both designs have their place.
Any system with a single block per rail is unquestionably better as a CoreXY. If you are running two blocks in an H-Bot, the cost of a few extra inches of rail is negligible, and rigidity is always welcome. The alternative is to mount four idlers at two different heights along the back of of a CoreXY.
Quote
I wouldn't necessarily assume that just because a "commercial" company does it, that it is done better. They have to worry about price points and profit margins.
If anything, the competitive and cost pressures of industry make them more likely to choose the optimal solution.
So why not build a coreXY with more than one block? I'm not entirely sure what you mean with your points. To me, CoreXY is a definitive evolution of H-bot as it avoids racking. You could over engineer a H bot to do the same, but this is not an elegant solution. You will inevitably add weight and lose build space.
Put simply, CoreXY does more with less.
Edited 1 time(s). Last edit at 06/13/2017 04:38PM by Origamib.
|
Re: Core XY vs Hbot Build June 15, 2017 12:06PM |
Registered: 11 years ago Posts: 335 |
Quote
So why not build a coreXY with more than one block?
Because you could build an H-Bot instead, and the H-Bot will be simpler and have a lower part count. I think where our opinions diverge is that I greatly value simple designs with few parts, especially in applications where accuracy matters. When designing a printer you should be constantly looking for the weakest link in the design. At some point racking is no longer your primary concern - you want the pulleys, idlers, and motors to be close to the frame so that their connections are as rigid as possible.
Consider what happens when you apply a force to the end-effector of your printer. It will be directly transferred idlers/pulleys in series (or by relieving tension, which is numerically the opposite but effectively the same). If you are applying 2lb of acceleration to the gantry then every idler is also experiencing a net 2lb force change, and if each idler is deflecting 10 microns under load that cumulative error starts to become a problem.
The primary disadvantage of CoreXY is that it requires belts on two separate planes. It might not sound like a big deal but in practice this has a lot of side-effects. Unfortunately I'm not sure I can provide examples of bad design without offending someone, so I hope the rest of this post is taken in context.
The worst-case CoreXY arrangement looks something like this: [i.imgur.com] . The pulleys and idlers are on long cantilevers which compromises rigidity, and the forces are being applied to the end-effector and gantry far from their center of gravity. Very few printers are this bad, but any CoreXY with both belts above the carriage has to manage these problems.
Moving the second belt below the linear rail is a good solution ( [i.imgur.com] ) but your entire belt path ends up inside the extrusion/rail assembly which wastes a lot of travel. Good CoreXY designs (and the preceding printer in particular) are also complex to build as the left and right motor mounts are often at different heights among other possible complications. This is an issue if you are having parts made from metal.
While I'm in the unsavoury part of the post, I might as well bring up an example of why I consider complexity to be almost universally undesirable: [forums.reprap.org]
The well-intentioned designer would like to replace fiberglass belts with steel belts, and includes an additional belt reduction stage to offset larger pulley diameter. On paper this sounds great - steel is more rigid than fiberglass - but lets actually think about what is happening here. Two additional belt-to-tooth interfaces have been added (each one will have small but non-zero backlash) and every additional idler and pulley is cantilevered into printed plastic. Do steel belts improve on fiberglass by enough to offset that kind of compliance? Were the fiberglass belts even a weak link to begin with? Why use a steel belt when half the belt path is printed plastic to begin with?
If I wanted to make a belt system more accurate I would start by making the pulley/idler mounts more rigid, then increase belt tension, and finally switch to servos with <0.1 degree angular repeatability. I would never add more idlers and timing pulleys to the design. In general accuracy is achieved by eliminating as many components as possible. There are obvious exceptions (for example more screws is better than no screws), but as a rule you want to make your "force loop" between motor and axis (as well as bed and end-effector) as short and as direct as possible.
H-Bot is extremely well suited to this principle. The typical H-Bot design ( [i.imgur.com] ) is absolute simplicity and allows very rigid and compact connections between the various parts.
Maybe the drawbacks of CoreXY are immaterial for 95% of printers, but if you are trying too push the limits of rigidity you need to think about these things. It is much easier to build a gantry that does not rack than it is to eliminate all compliance in the belt-path.
Edited 1 time(s). Last edit at 06/15/2017 12:06PM by 691175002.
|
Re: Core XY vs Hbot Build June 15, 2017 01:16PM |
Registered: 11 years ago Posts: 5,780 |
Managing two level belts and making rigid motor mounts on two levels isn't all that hard to do. All you need is a hacksaw, a drill, and some cheap rectangular aluminum tubing:
Most people don't think like any type of engineer and for most, the cost of the printer takes priority over print quality. Many have been told they can print anything with a 3D printer and refuse to believe that their printed parts aren't every bit as good as metal parts, even when they see pictures of flexed motor mounts and cantilevered pulleys. Denial of reality is very popular these days.
Ultra MegaMax Dominator 3D printer: [drmrehorst.blogspot.com]

Most people don't think like any type of engineer and for most, the cost of the printer takes priority over print quality. Many have been told they can print anything with a 3D printer and refuse to believe that their printed parts aren't every bit as good as metal parts, even when they see pictures of flexed motor mounts and cantilevered pulleys. Denial of reality is very popular these days.
Ultra MegaMax Dominator 3D printer: [drmrehorst.blogspot.com]
|
Re: Core XY vs Hbot Build June 15, 2017 01:18PM |
Registered: 7 years ago Posts: 249 |
Quote
691175002
...The primary disadvantage of CoreXY is that it requires belts on two separate planes...
False, most ppl go this route, like the C and D bots, because the asymmetry simplifies the design, and while the assumption may be that two tiered attachment torques the carriage more than the H-bot arrangement is variable on where the belt attachments are located.
For "true" CoreXY, belts are on the same plane and cross at the back, which done properly do not degrade belt life or affect precision.
I don't see CoreXY as complex, in fact have taken it to another level, literally, as you so kindly linked.
[forums.reprap.org]
Yes, steel core belts for the main drive, and fiberglass for the motors.
However, you fail to notice that my CoreXYU "Hlidskjalf" uses more symmetry in printed parts than your standard CoreXY (https://www.thingiverse.com/thing:1790970). The pic you linked is actually on both sides of the printer. The lower stepper pair drive one carriage while the upper pair the other. With the correct number of teeth engaged backlash is minimal (if even measurable), and power transmission optimal.
Cantilevered pulleys are not really an issue if done properly. 6mm steel PU belts only require 4 lbs of tension, 9mm GT2 even less. Even if you factor in drive forces (which I have) a #10-32 thread will deflect near nothing that will impart any loss of rigity, plus the inner race of the bearing are sandwiched onto the disturbingly over-engineered printed plastic parts, further increasing the ability to handle side loads.
For a moment, imagine what a dual carriage H-bot looks like, then compare it to as you stated "complexity to be almost universally undesirable". Thankfully, I live in a different universe, the CoreXY.
Edited 1 time(s). Last edit at 06/15/2017 01:24PM by prot0typ1cal.
|
Re: Core XY vs Hbot Build June 15, 2017 04:43PM |
Registered: 7 years ago Posts: 249 |
BTW the_digital_dentist,
I'm more than aware that printed plastic has around 1/10th the tensile and 1/20th the yield strength of 6061, and that's being generous.
In the true vein of RepRap, 3d printed my parts, plus at the time hadn't access to make them out of aluminum.
As the 3d printed parts begin to fail, and they will under normal fatigue, most likely replace them with milled billet.
Been nice to start with metal components, but it will be interesting to see what lasts in plastic (probably nothing), and observe how those that don't.
Destructive testing can be fun, albeit a waste of time, though unfortunately a necessary means of progress in my case.
I'm more than aware that printed plastic has around 1/10th the tensile and 1/20th the yield strength of 6061, and that's being generous.
In the true vein of RepRap, 3d printed my parts, plus at the time hadn't access to make them out of aluminum.
As the 3d printed parts begin to fail, and they will under normal fatigue, most likely replace them with milled billet.
Been nice to start with metal components, but it will be interesting to see what lasts in plastic (probably nothing), and observe how those that don't.
Destructive testing can be fun, albeit a waste of time, though unfortunately a necessary means of progress in my case.
|
Re: Core XY vs Hbot Build June 15, 2017 05:53PM |
Registered: 8 years ago Posts: 338 |
|
Re: Core XY vs Hbot Build June 15, 2017 09:21PM |
Registered: 7 years ago Posts: 249 |
|
Re: Core XY vs Hbot Build June 17, 2017 01:24PM |
Registered: 9 years ago Posts: 4 |
|
Re: Core XY vs Hbot Build June 17, 2017 05:08PM |
Registered: 8 years ago Posts: 601 |
Quote
adam440
Can you make some kind of list about advantages and disadvantages of CoreXY, H-Bot and possibly other drive systems (like D-Bot) with hot-end moving in X/Y direction?
D bot is a coreXY system, otherwise the pros and cons of all the printers with Z moving bed systems are very similar. In a sturdy well thought out build, there would be only miniscule differences in print quality between all of them. A quick summary though:
CoreXY compared to H bot (of similar high build quality):
- no racking of coreXY system, or at least less likely to.
- possibly bigger print table compared to printer size on CoreXY In my opinion, due to not having to over engineer the Y axis.
- lighter Y axis in CoreXY , faster speeds.
- 'Simplicity' of build with H bot? Possible advantage.
- open axis to front of frame on H bot due to no crossing belt. Also possible with alternative CoreXY configurations.
Ultimaker style Cartesian compared to standard Cartesian where x axis motor moves with Y axis:
- ultimaker is faster due to lighter components
- ultimaker has compromise between weight of XY rods and speed and gantry weight. Heavier rods support a heavier gantry (e.g. direct drive or multi nozzle) , but then prints slower. Usually limited to Bowden set up. Not to say that other printers don't, but ultimaker has more rods consider with thinner cross section then extrusion making it more likely to bow.
- standard Cartesian is simple to set up, easier to calibrate.
- ultimaker is slightly more difficult to calibrate with crossing rods and more belts.
I think I've covered most points. Most of the points made by 69117949402 are moot as they can also be applied to H bot. Cantilevered pulleys and printed parts are not unique to coreXY systems. There are many other arrangements similar to H bot and CoreXY but these are quite specific. Check out the belt arrangement in an etch a sketch!
|
Re: Core XY vs Hbot Build June 18, 2017 02:15AM |
Registered: 8 years ago Posts: 5,232 |
What Origamib said....
+ the CoreXY needs only two steppers to move the gantry => One more driver for extruders + no risk of two Y-steppers running out of sync
+ H-Bot has shorter belts, so the belt stretch might be less. But the higher mass of the gantry reduces/eliminates this advantage.
Edited 1 time(s). Last edit at 06/18/2017 02:21AM by o_lampe.
+ the CoreXY needs only two steppers to move the gantry => One more driver for extruders + no risk of two Y-steppers running out of sync
+ H-Bot has shorter belts, so the belt stretch might be less. But the higher mass of the gantry reduces/eliminates this advantage.
Edited 1 time(s). Last edit at 06/18/2017 02:21AM by o_lampe.
|
Re: Core XY vs Hbot Build June 18, 2017 02:56PM |
Registered: 7 years ago Posts: 249 |
Hmm.. IDK about the H-Bot gantry being heavier?
In both CoreXY and H-Bot the motors are stationary, and are not coupled to the gantry.
In the case of an IDEX design, like the FolgerTech FT-5, or BNC3D Sigma, yes, the X motors are mounted to the gantry.
H-Bot only requires 3 idlers on the gantry, while CoreXY 4. H-Bot only one bely run on the gantry, while CoreXY two.
Where the CoreXY and H-Bot diverge is in efficiency.
With all things considered equal: frame stiffness, linear selection (rods/bushings or linear guides, etc.) belt and stepper size.
H-Bot typically uses only one motor to drive the X, and one for the Y. Y motor must work harder to drive more mass, unless like the FT-5 opt for 2x Y stepper/belts.
Where this is an advantage is in 45/135 degree moves, when all the H-Bot steppers work together.
Bare minimal requirements for an H-Bot are 2x steppers and 5 idlers.
CoreXY syncs two steppers to create either pure X or Y movements, while for 45/135 moves only one stepper is providing work.
On the positive side, CoreXY has two belt runs to the X carriage, providing better load handling characteristics with the caveat of longer/more belts.
Bare minimal requirements for CoreXY are 2x steppers and 8 idlers, with the total belt length needed some 30 to 50% more than a H-Bot.
Where the CoreXY exceeds H-Bot is in equilibrium of loads, forces on the CoreXY balance each other so the gantry doesn't "rack" (pulled out of square).
CoreXY forces are better at pure X and Y moves, while H-Bot is better at 45/135 degree moves.
Another XY cartesian printer with a Z bed is the Ultimaker.
Ultimaker style 3d printers have an Etch-a-sketch like mechanism, only using exterior guide rods to rotate opposite belt runs rather than etch-a-sketch really really long runs. The two crossing sticks are very easy to understand, and still only two steppers. However, the entire Ultimaker mechanism requires more rods than either the H-Bot or CoreXY.
Only suitable for light loads, the crossing rods typically only carry remote drive (Bowden) extruders.
The biggest advantage (warm and fuzzy) H-Bot and Ultimaker have over CoreXY is that when one stepper rotates, you get movement in one axis, while when the other stepper rotates you get movement in the other axis. Most people understand this simple input/output, while the CoreXY bends the noodle some even if you don't really need to understand the math behind the kinematics. Then there's the "OMG, look at all those belts and pulleys" that scare simpletons away from CoreXY.
In both CoreXY and H-Bot the motors are stationary, and are not coupled to the gantry.
In the case of an IDEX design, like the FolgerTech FT-5, or BNC3D Sigma, yes, the X motors are mounted to the gantry.
H-Bot only requires 3 idlers on the gantry, while CoreXY 4. H-Bot only one bely run on the gantry, while CoreXY two.
Where the CoreXY and H-Bot diverge is in efficiency.
With all things considered equal: frame stiffness, linear selection (rods/bushings or linear guides, etc.) belt and stepper size.
H-Bot typically uses only one motor to drive the X, and one for the Y. Y motor must work harder to drive more mass, unless like the FT-5 opt for 2x Y stepper/belts.
Where this is an advantage is in 45/135 degree moves, when all the H-Bot steppers work together.
Bare minimal requirements for an H-Bot are 2x steppers and 5 idlers.
CoreXY syncs two steppers to create either pure X or Y movements, while for 45/135 moves only one stepper is providing work.
On the positive side, CoreXY has two belt runs to the X carriage, providing better load handling characteristics with the caveat of longer/more belts.
Bare minimal requirements for CoreXY are 2x steppers and 8 idlers, with the total belt length needed some 30 to 50% more than a H-Bot.
Where the CoreXY exceeds H-Bot is in equilibrium of loads, forces on the CoreXY balance each other so the gantry doesn't "rack" (pulled out of square).
CoreXY forces are better at pure X and Y moves, while H-Bot is better at 45/135 degree moves.
Another XY cartesian printer with a Z bed is the Ultimaker.
Ultimaker style 3d printers have an Etch-a-sketch like mechanism, only using exterior guide rods to rotate opposite belt runs rather than etch-a-sketch really really long runs. The two crossing sticks are very easy to understand, and still only two steppers. However, the entire Ultimaker mechanism requires more rods than either the H-Bot or CoreXY.
Only suitable for light loads, the crossing rods typically only carry remote drive (Bowden) extruders.
The biggest advantage (warm and fuzzy) H-Bot and Ultimaker have over CoreXY is that when one stepper rotates, you get movement in one axis, while when the other stepper rotates you get movement in the other axis. Most people understand this simple input/output, while the CoreXY bends the noodle some even if you don't really need to understand the math behind the kinematics. Then there's the "OMG, look at all those belts and pulleys" that scare simpletons away from CoreXY.
|
Re: Core XY vs Hbot Build June 18, 2017 04:45PM |
Registered: 11 years ago Posts: 5,780 |
"Then there's the "OMG, look at all those belts and pulleys" that scare simpletons away from CoreXY."
Amen brother!
Ultra MegaMax Dominator 3D printer: [drmrehorst.blogspot.com]
Amen brother!
Ultra MegaMax Dominator 3D printer: [drmrehorst.blogspot.com]
|
Re: Core XY vs Hbot Build June 19, 2017 07:41PM |
Registered: 11 years ago Posts: 335 |
Quote
prot0typ1cal
For a moment, imagine what a dual carriage H-bot looks like, then compare it to as you stated "complexity to be almost universally undesirable". Thankfully, I live in a different universe, the CoreXY.
This would just be my first intuitive approach to the problem, but I can't see any immediate disadvantages of this layout. The "primary" carriage is connected to red belt, with the secondary carriage on blue.

I would have probably used servos for the red motors, and a single cheaper motor for blue. I'll admit that I would not have thought of using four motors until I saw your design. After thinking about it, using four identical motors seems much better as you have a smaller BOM and double torque in the Y direction. The double torque in Y is extremely nice since it will make acceleration in X and Y more similar.
I didn't intend on hijacking the thread, but I'm curious as to what you think of this layout:

My impression is that the two belt paths resist racking in a similar fashion to CoreXY (if you also mount the carriages on opposite sides of the extrusion), but I'd have to think about it.
Edited 3 time(s). Last edit at 06/19/2017 07:49PM by 691175002.
|
Re: Core XY vs Hbot Build June 19, 2017 10:40PM |
Registered: 7 years ago Posts: 249 |
691175002
Design looks promising.
May want to place all 4 steppers in the rear, to tidy up the wiring harness.
Here's a video of a really big H-bot, for those that are interested:
[www.macrondynamics.com]
There's a guy who is making a CoreXYU similar to mine, except no belt reduction and all four steppers in the front,
I think he's going to call it Mjölnir.
There's also Lars, who already has modified Duet firmware:
[www.youtube.com]
I must admit, I've been in err about the kinematics behind the H-Bot, for a long time now I thought it was the same as the markforged.
For all intent and purpose, H-bots behave very similar to coreXY, only less belts to the carriage.
here's a pic of the Markforged (and yes the belt path is FUBAR):
Edited 1 time(s). Last edit at 06/19/2017 10:41PM by prot0typ1cal.
Design looks promising.
May want to place all 4 steppers in the rear, to tidy up the wiring harness.
Here's a video of a really big H-bot, for those that are interested:
[www.macrondynamics.com]
There's a guy who is making a CoreXYU similar to mine, except no belt reduction and all four steppers in the front,
I think he's going to call it Mjölnir.
There's also Lars, who already has modified Duet firmware:
[www.youtube.com]
I must admit, I've been in err about the kinematics behind the H-Bot, for a long time now I thought it was the same as the markforged.
For all intent and purpose, H-bots behave very similar to coreXY, only less belts to the carriage.
here's a pic of the Markforged (and yes the belt path is FUBAR):

Edited 1 time(s). Last edit at 06/19/2017 10:41PM by prot0typ1cal.
|
Re: Core XY vs Hbot Build June 20, 2017 01:50AM |
Registered: 8 years ago Posts: 5,232 |
|
Re: Core XY vs Hbot Build June 20, 2017 11:12AM |
Registered: 7 years ago Posts: 249 |
@o_lampe
The formulas for Markforged are correct, to maintain X position while Y moves, both A and B must synch. If Y doesn't move (delta A) then only B drives X.
FUBAR = F**ked Up Beyond All Recognition.
Referring to the blue belt path being skewed (not right angles and parallel run to the gantry).
Fairly sure the Macrondynamics video is H-Bot, no crossing belts. Belts are pretty tall, at least 25mm, no hiding those beasts.
The formulas for Markforged are correct, to maintain X position while Y moves, both A and B must synch. If Y doesn't move (delta A) then only B drives X.
FUBAR = F**ked Up Beyond All Recognition.
Referring to the blue belt path being skewed (not right angles and parallel run to the gantry).
Fairly sure the Macrondynamics video is H-Bot, no crossing belts. Belts are pretty tall, at least 25mm, no hiding those beasts.
|
Re: Core XY vs Hbot Build June 21, 2017 01:56AM |
Registered: 8 years ago Posts: 5,232 |
|
Re: Core XY vs Hbot Build July 21, 2017 02:34AM |
Registered: 7 years ago Posts: 3 |
Whilst I have only been using 3d printers for a few years , I have put together I3 and Ultimaker style printers.
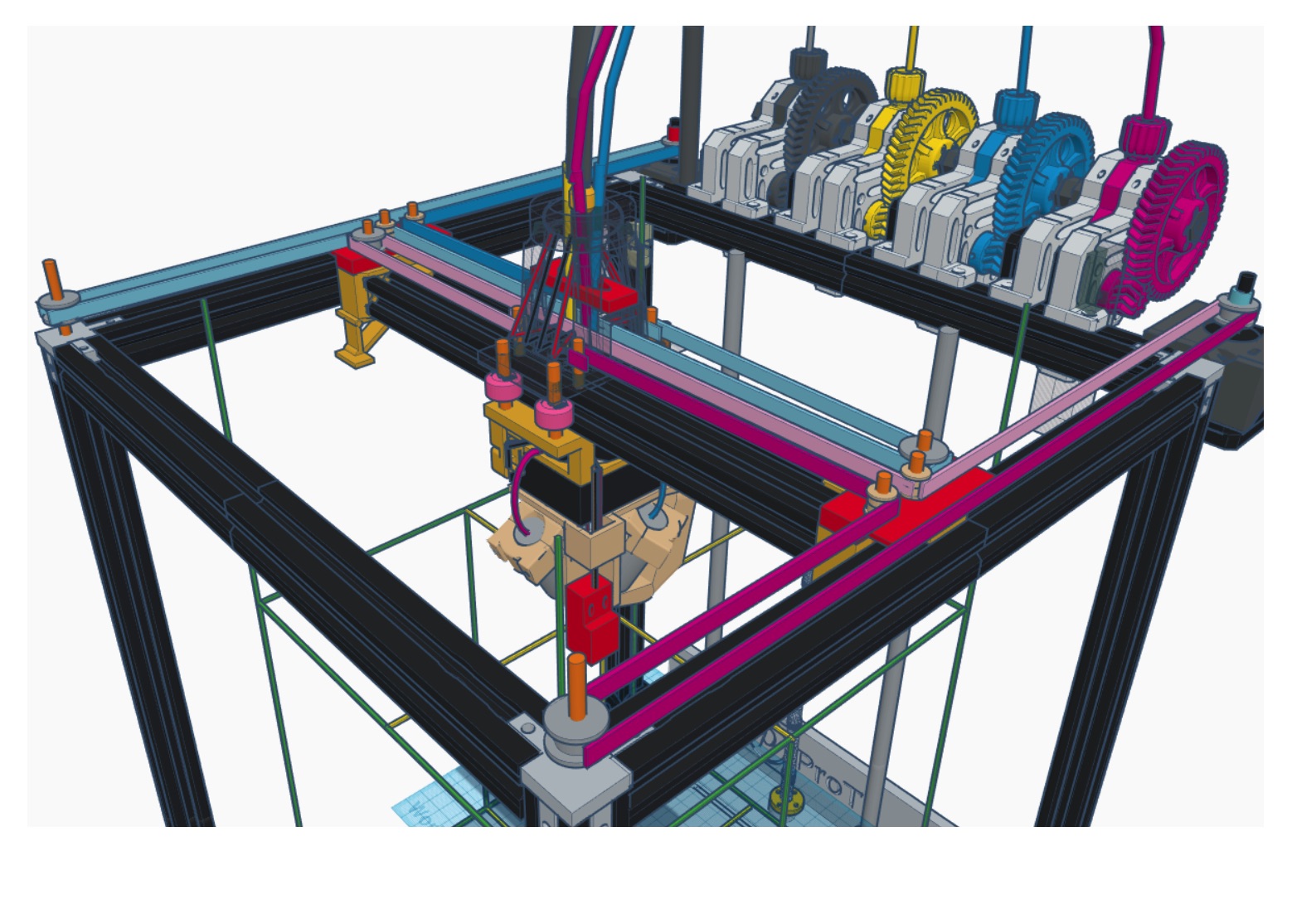
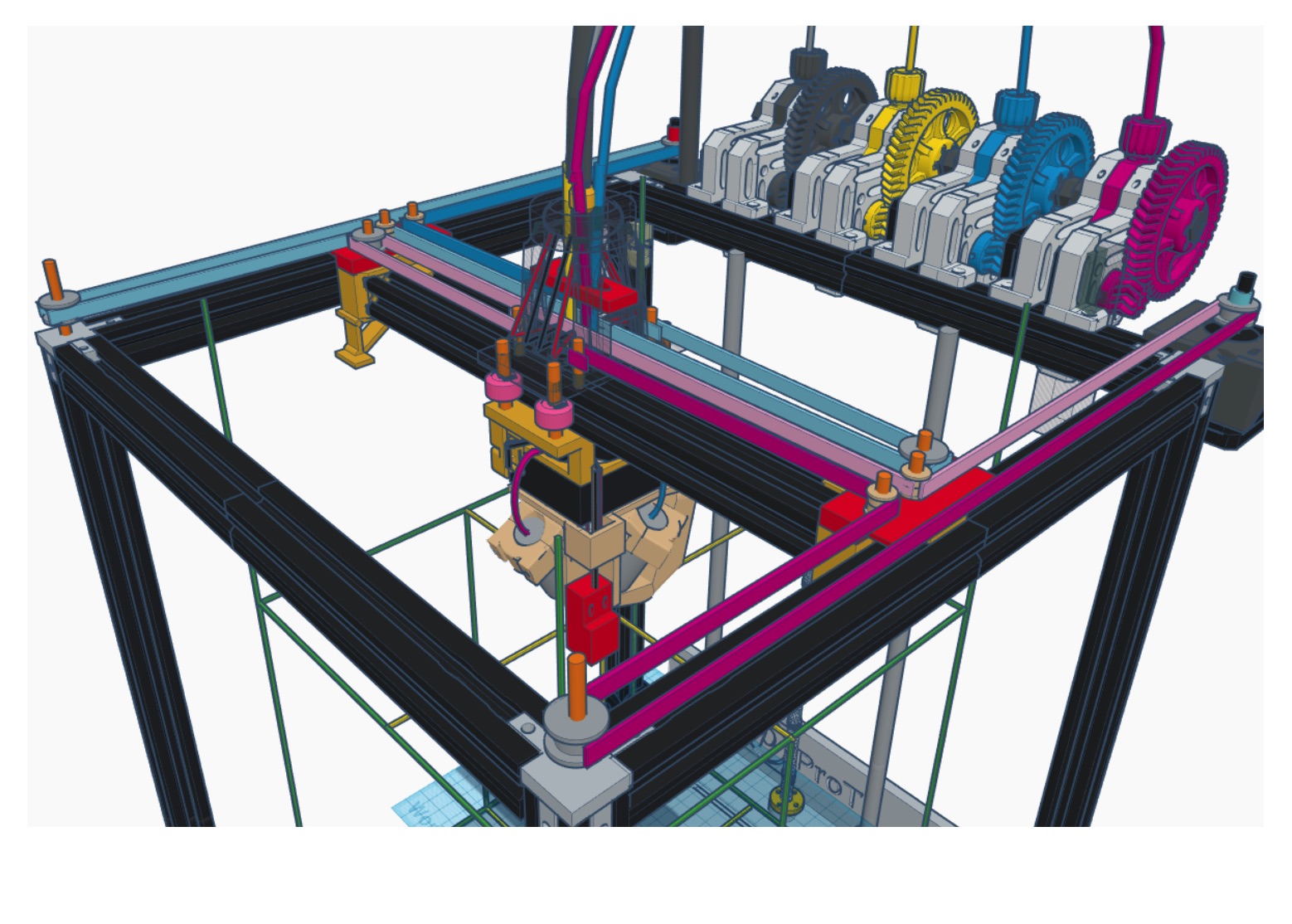
I have decided to make my next one for 3 to 5 colours mixing via a single nozzle.
I don't like the idea of crossing belts or belts on different planes, and have done a lot of playing around .
The question is that, is this rough sketch-up, CoreXY, is it possible and will it work
I have decided to make my next one for 3 to 5 colours mixing via a single nozzle.
I don't like the idea of crossing belts or belts on different planes, and have done a lot of playing around .
The question is that, is this rough sketch-up, CoreXY, is it possible and will it work

{kind=link}
{kind=link}
Sorry, only registered users may post in this forum.