Core XY vs Hbot Build
Posted by rikesh942010
|
Re: Core XY vs Hbot Build July 21, 2017 05:56PM |
Registered: 7 years ago Posts: 249 |
Quote
sangthip
The question is that, is this rough sketch-up, CoreXY, is it possible and will it work
Not a CoreXY, or H-bot.
Looks like a bastardized Markforged, only the delta B loop is doubled up (mirrored).
Won't work. Both motors must synch for any movement to occur, and it can be either X, Y or both. No control IMHO.
|
Re: Core XY vs Hbot Build July 21, 2017 11:13PM |
Registered: 7 years ago Posts: 3 |
Sorry but your statement "only the delta B loop is doubled up" to me is not so.
I have attached a simple line drawing of the belt runs, please have a look, and let me know if in fact your statement was correct
I don't seem to be able to find a belt layout of the Markforgd, can you point me to a site that shows this.
I accept your answer as negative and look for other comments from anyone, wether they are positive or negative.
I have attached a simple line drawing of the belt runs, please have a look, and let me know if in fact your statement was correct
I don't seem to be able to find a belt layout of the Markforgd, can you point me to a site that shows this.
I accept your answer as negative and look for other comments from anyone, wether they are positive or negative.
|
Re: Core XY vs Hbot Build July 22, 2017 01:20AM |
Registered: 8 years ago Posts: 601 |
It looks to me like a CoreXY, but the belt travels along the gantry instead of the back of the machine where the belts would usually cross. I think it should work, I have a feeling only testing it will give you the answer. Good luck with all those pulleys! Seems like an over complication to me
|
Re: Core XY vs Hbot Build July 22, 2017 03:12AM |
Registered: 7 years ago Posts: 249 |
Quote
sangthip
I don't seem to be able to find a belt layout of the Markforgd, can you point me to a site that shows this.
The Markforged kinematics is posted on the 1st page of this thread (by me).
I'm not negative, just realistic.
Here's a "fixed" version of your "double-cross" that will work:

|
Re: Core XY vs Hbot Build August 13, 2017 05:31AM |
Registered: 7 years ago Posts: 3 |
|
Re: Core XY vs Hbot Build July 18, 2019 05:51PM |
Registered: 5 years ago Posts: 5 |
I have built a 'Double H-Bot' (two sets of belts driving one xy gantry). It was a rather large experiment (m3 build volume) but I can say that it works a treat and I am 'double happy' about it. In my opinion it is superior to the twisted belt core xy and is particularly suited to larger builds e.g. the belt length per 'H' in my build is 7.2m...

- ZERO racking of y-axis gantry.
- Balanced 'driven belt length' and up to 50% shorter driven length than a standard core-xy.
- Lighter build - no need to compensate for racking.
- Use smaller cheaper motors (NEMA-17) and drivers for big builds.
Edited 1 time(s). Last edit at 07/19/2019 07:53PM by Peter Stoneham.




|
Re: Core XY vs Hbot Build July 21, 2019 03:34AM |
Registered: 6 years ago Posts: 134 |
|
Re: Core XY vs Hbot Build July 21, 2019 06:04AM |
Admin Registered: 11 years ago Posts: 3,096 |
Quote
piper3d
This is questionable as a single belt in coreXY will be about 4.8m in the same configuration.Quote
Peter Stoneham
In my opinion it is superior to the twisted belt core xy and is particularly suited to larger builds e.g. the belt length per 'H' in my build is 7.2m...
I'm building a large format pen plotter and am definitely going for CoreXY as belt length will be a big factor in how precise my drawings will be. More stretch = more artifacts. Especially visible in a pen plotter running superfast while drawing a thin line. A shorter belt also meant less mass to move and I'm willing to ditch as much weight as possible for gain in speed and precision. I haven't seen any better proposal other than having a corexy without the belt crossing.
Edited 1 time(s). Last edit at 07/21/2019 06:05AM by Ohmarinus.
http://www.marinusdebeer.nl/
|
Re: Core XY vs Hbot Build July 21, 2019 08:58AM |
Registered: 11 years ago Posts: 5,780 |
I think it would be more reasonable to compare the stacked-belt dual H-bot to a stacked-belt corexy.
How can an H-belt path be shorter than the belt path for a corexy that prints over the same area?
How is it cheaper to use 4 motors than to use 2? You need 2 extra motors, cables, drive pulleys, motor mounts, and maybe two more drivers, too. What does that do to the size of the machine and the cost of the electronics?
In a corexy machine, each belt passes over 5 pulleys including the drive pulley. In the dual H-bot I count 8 pulleys on each belt.
I'm having trouble seeing the superiority of the dual h-bot design...
Ultra MegaMax Dominator 3D printer: [drmrehorst.blogspot.com]
How can an H-belt path be shorter than the belt path for a corexy that prints over the same area?
How is it cheaper to use 4 motors than to use 2? You need 2 extra motors, cables, drive pulleys, motor mounts, and maybe two more drivers, too. What does that do to the size of the machine and the cost of the electronics?
In a corexy machine, each belt passes over 5 pulleys including the drive pulley. In the dual H-bot I count 8 pulleys on each belt.
I'm having trouble seeing the superiority of the dual h-bot design...
Ultra MegaMax Dominator 3D printer: [drmrehorst.blogspot.com]
|
Re: Core XY vs Hbot Build July 21, 2019 05:25PM |
Registered: 5 years ago Posts: 5 |
Quote
the_digital_dentist
I think it would be more reasonable to compare the stacked-belt dual H-bot to a stacked-belt corexy.
Sorry I'm not exactly sure what you mean by stacked-belt corexy. Please explain.
Quote
the_digital_dentist
How can an H-belt path be shorter than the belt path for a corexy that prints over the same area?
Here is the 'driven' belt path (shown in yellow) that will help to explain.

Quote
the_digital_dentist
How is it cheaper to use 4 motors than to use 2? You need 2 extra motors, cables, drive pulleys, motor mounts, and maybe two more drivers, too. What does that do to the size of the machine and the cost of the electronics?
Fair points. I think the overall cost of parts for a Double H-Bot would be slightly higher. For the size I am building I was looking at two NEMA23 motors that are generally around double the cost of NEMA17 motors. Drivers are relatively cheap but if you were penny pinching you could drive them in series. I was also looking at wider belts stiffer gantry etc etc.
Quote
the_digital_dentist
In a corexy machine, each belt passes over 5 pulleys including the drive pulley. In the dual H-bot I count 8 pulleys on each belt.
Correct on number of pulleys for Double H-Bot.
Quote
the_digital_dentist
I'm having trouble seeing the superiority of the dual h-bot design...
From a 'driven' balanced belt path (with no racking) I believe there is an advantage especially for larger machines.
I think I have achieved a pretty compact design...
Outside Dimensions using 1200mm cut lengths of 2040; x=1200mm y=1300 z= 1380
Build Volume; x=1000mm y=1050 z= 1100
The belt inside the v-slot;

|
Re: Core XY vs Hbot Build July 21, 2019 05:31PM |
Registered: 5 years ago Posts: 5 |
Quote
Ohmarinus
I'm building a large format pen plotter and am definitely going for CoreXY as belt length will be a big factor in how precise my drawings will be. More stretch = more artifacts. Especially visible in a pen plotter running superfast while drawing a thin line. A shorter belt also meant less mass to move and I'm willing to ditch as much weight as possible for gain in speed and precision. I haven't seen any better proposal other than having a corexy without the belt crossing.
The Double H-Bot is a potential option to consider for your pen plotter. Driven belt length is shorter and balanced so less artifacts.

|
Re: Core XY vs Hbot Build July 21, 2019 07:19PM |
Registered: 11 years ago Posts: 5,780 |
4 motors to move a pen seems excessive.
What is "driven length"?
Ultra MegaMax Dominator 3D printer: [drmrehorst.blogspot.com]
What is "driven length"?
Ultra MegaMax Dominator 3D printer: [drmrehorst.blogspot.com]
|
Re: Core XY vs Hbot Build July 21, 2019 08:29PM |
Registered: 5 years ago Posts: 5 |
Quote
the_digital_dentist
4 motors to move a pen seems excessive.
Maybe but maybe not - one would have to weigh up all the pros and cons for a particular build design.
Quote
the_digital_dentist
What is "driven length"?
'Driven length' in this case is the belt length from a set of xy motor pulleys to where the belt is fixed on the x-axis gantry (marked in yellow on my previous diagram). This is the portion of the belt that stretch matters. For a single belted system this increases as the y-gantry moves away from the end that the motors are on. With a double belted system (two sets of motors at each end) the 'driven length' is balanced out. Given that a Double H-Bot does not suffer from racking then this would be the obvious choice if you were to go with four motors.
I haven't seen another build example with this belt arrangement so it seems, for the moment at least, I am on my own to explain and defend it. I agree that a Double H-Bot is not going to suit every application, however, for my particular design I believe it was the right choice.
|
Re: Core XY vs Hbot Build July 21, 2019 08:30PM |
Registered: 6 years ago Posts: 5 |
Length between the motor and carriage.Quote
the_digital_dentist
4 motors to move a pen seems excessive.
What is "driven length"?
I can see possible advantages in a big unit with extrusions, in that, like QuadRap, it could reduce the necessity for very high rigidity, by driving the other half of the belt, instead of expecting it to only minimally deflect (though without the delta-level weight savings on the gantry required for good fast prints, as the size grows).
|
Re: Core XY vs Hbot Build July 21, 2019 09:08PM |
Registered: 5 years ago Posts: 5 |
Here are the belt connections and tensioners on the x-axis gantry. The belts can be individually tensioned;
Belts are 2GT aramide reinforced - not 100% convinced I made the right choice here.
Edited 1 time(s). Last edit at 07/21/2019 09:16PM by Peter Stoneham.



Belts are 2GT aramide reinforced - not 100% convinced I made the right choice here.

Edited 1 time(s). Last edit at 07/21/2019 09:16PM by Peter Stoneham.
|
Re: Core XY vs Hbot Build October 16, 2019 05:56AM |
Registered: 5 years ago Posts: 2 |
CoreXY is susceptible to unequal belt tensions, is it? Unequal belt tension would result in an unparallel Y axis as far as I know.
BTW I'm also trying to build a CoreXYU, but with all 4 belts stacked on top of each other
edit: oops I meant "unparallel Y gantry"
Edited 1 time(s). Last edit at 10/17/2019 01:54AM by sharctic.
BTW I'm also trying to build a CoreXYU, but with all 4 belts stacked on top of each other
edit: oops I meant "unparallel Y gantry"
Edited 1 time(s). Last edit at 10/17/2019 01:54AM by sharctic.
|
Re: Core XY vs Hbot Build October 16, 2019 10:50AM |
Registered: 11 years ago Posts: 5,780 |
Belt tension doesn't usually affect the Y axis rails.
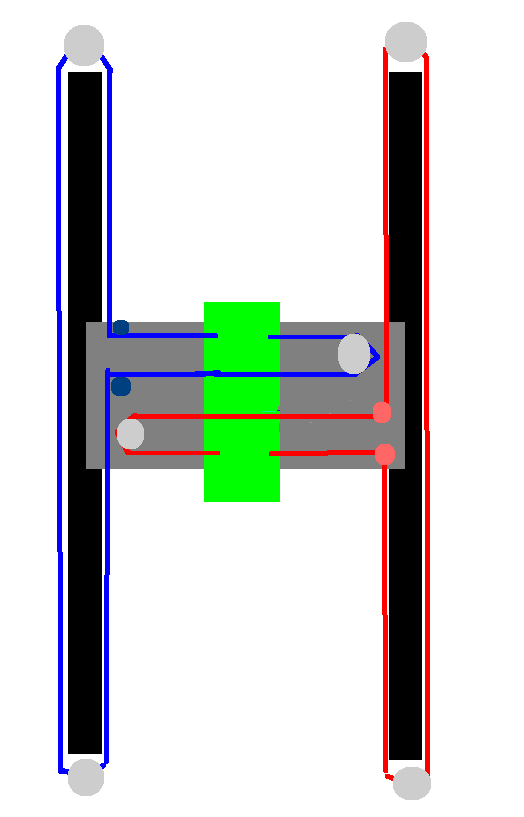
Start with the assembly built so that the X axis is square to the Y axis without the belts. When you tension the belts in a corexy machine, you pull the first belt almost as tight as you want it to be when tensioning is finished (I know, it sounds flakey). That tension will pull the X axis out of square with the Y axis. You then tension the second belt, and pull it tight enough to square up the X axis again. As the X axis comes back into square with the Y axis, the first belt will tighten up.
Ignore the bottom/green belt in the diagram below. When you tension the top belt, there will be forces on the X axis indicated by the red arrows. Those forces will cause the X axis to rotate out of square with the Y axis. Tensioning the lower belt adds in the forces represented by the green arrows which will rotate the X axis back into square with the Y axis. When the forces are balanced, the X axis will be square with the Y axis.
See: [drmrehorst.blogspot.com]
This is of course, static conditions. As the mechanism moves, belt tensions are going to vary depending on direction of movement, masses, and acceleration.
Ultra MegaMax Dominator 3D printer: [drmrehorst.blogspot.com]
Start with the assembly built so that the X axis is square to the Y axis without the belts. When you tension the belts in a corexy machine, you pull the first belt almost as tight as you want it to be when tensioning is finished (I know, it sounds flakey). That tension will pull the X axis out of square with the Y axis. You then tension the second belt, and pull it tight enough to square up the X axis again. As the X axis comes back into square with the Y axis, the first belt will tighten up.
Ignore the bottom/green belt in the diagram below. When you tension the top belt, there will be forces on the X axis indicated by the red arrows. Those forces will cause the X axis to rotate out of square with the Y axis. Tensioning the lower belt adds in the forces represented by the green arrows which will rotate the X axis back into square with the Y axis. When the forces are balanced, the X axis will be square with the Y axis.

See: [drmrehorst.blogspot.com]
This is of course, static conditions. As the mechanism moves, belt tensions are going to vary depending on direction of movement, masses, and acceleration.
Ultra MegaMax Dominator 3D printer: [drmrehorst.blogspot.com]

{kind=link}
{kind=link}
Sorry, only registered users may post in this forum.