CoreXYish IDEX
Posted by bondus
|
CoreXYish IDEX July 10, 2020 05:27AM |
Registered: 5 years ago Posts: 10 |
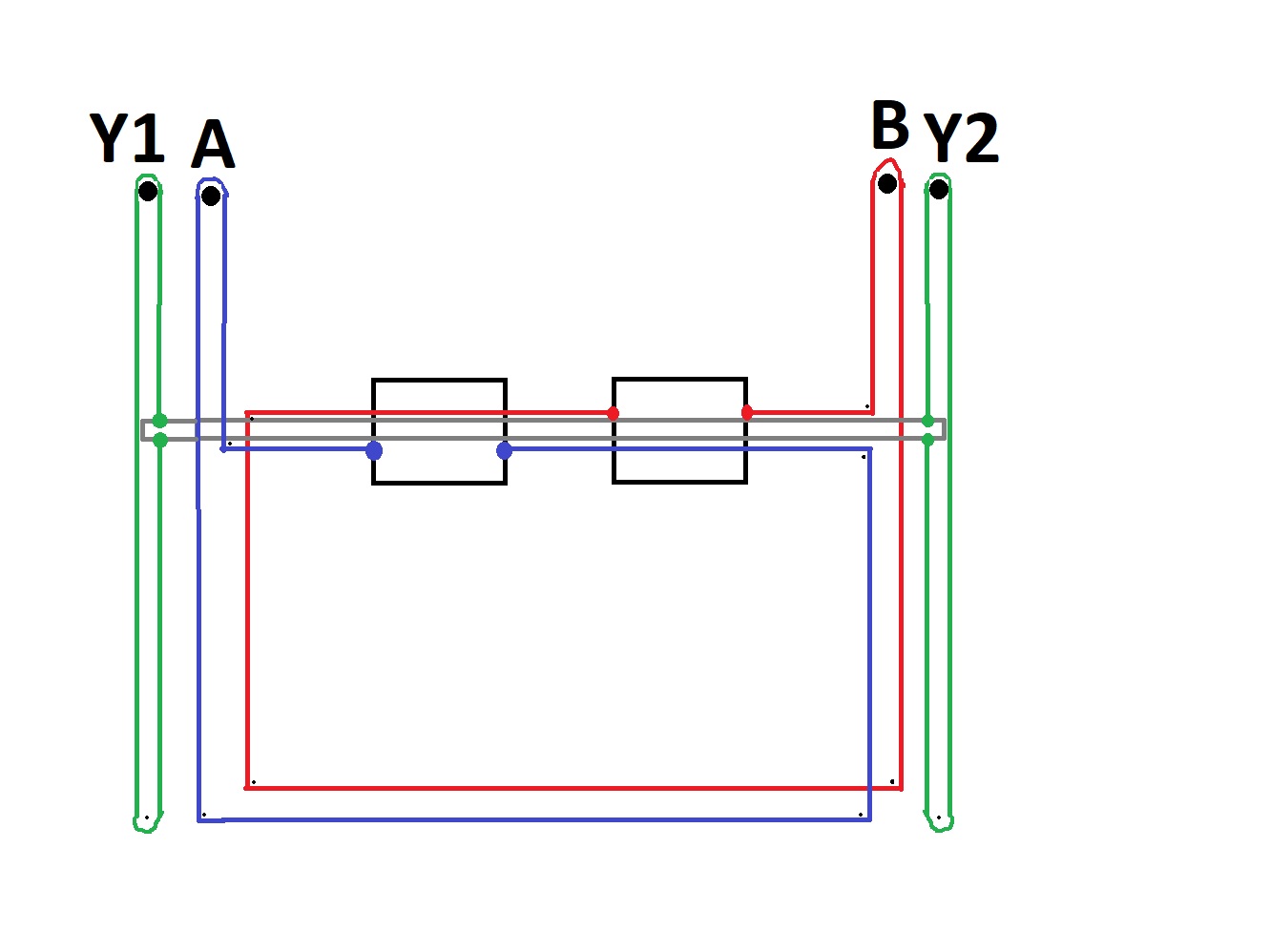
While thinking of alternative ways to do the kinematics of an IDEX machine I came up with this hybrid kinematics.
The belt routing is like a CoreXY, but each loop is connected to a separate head. The Y axis (the gantry) is run directly by two belt loops, either by two steppers or pulleys connected with an axle.
The main goal is, compared to a pure cartesian, move the heavy X motors to a static position.
As the CoreXY loops holds the gantry perpendicular to Y it might be possible, or even better, to use just one Y belt. The system is over constrained as drawn.
Has anyone built something similar or seen this before?
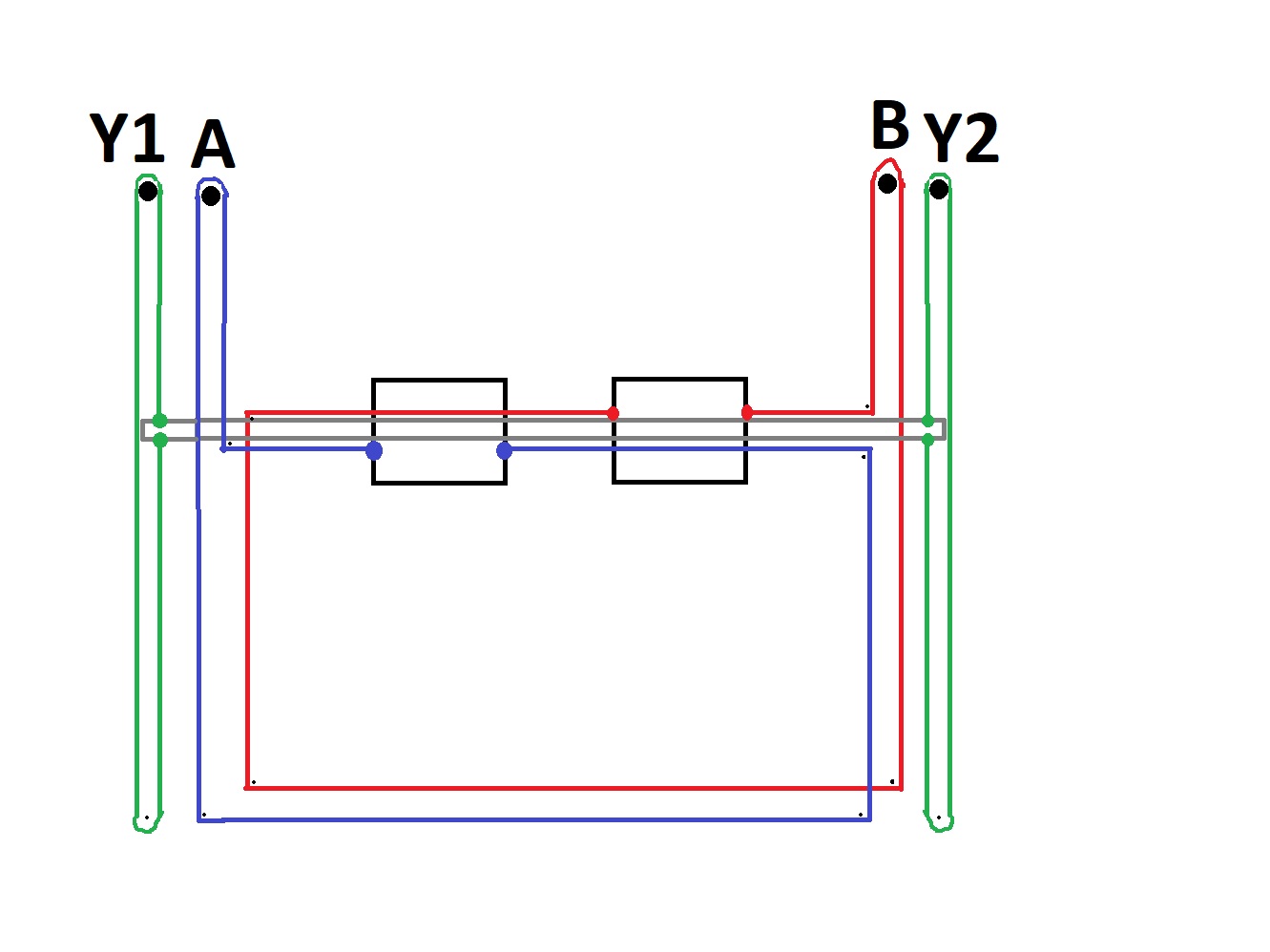
The belt routing is like a CoreXY, but each loop is connected to a separate head. The Y axis (the gantry) is run directly by two belt loops, either by two steppers or pulleys connected with an axle.
The main goal is, compared to a pure cartesian, move the heavy X motors to a static position.
As the CoreXY loops holds the gantry perpendicular to Y it might be possible, or even better, to use just one Y belt. The system is over constrained as drawn.
Has anyone built something similar or seen this before?
{kind=link}
{kind=link}
|
Re: CoreXYish IDEX July 10, 2020 01:54PM |
Registered: 10 years ago Posts: 14,672 |
I think that's almost equivalent to dual MarkForged kinematics, but it has the disadvantage that the A and B belt tensions will tend to twist the X axis.
CoreXY IDEX has been implemented using CoreXYUV kinematics, CoreXYU kinematics, CoreXY+MarkForged kinematics, and dual MarkForged kinematics (and possibly others that I am not aware of). RepRapFirmware supports all of them.
Edited 3 time(s). Last edit at 07/10/2020 01:59PM by dc42.
Large delta printer [miscsolutions.wordpress.com], E3D tool changer, Robotdigg SCARA printer, Crane Quad and Ormerod
Disclosure: I design Duet electronics and work on RepRapFirmware, [duet3d.com].
CoreXY IDEX has been implemented using CoreXYUV kinematics, CoreXYU kinematics, CoreXY+MarkForged kinematics, and dual MarkForged kinematics (and possibly others that I am not aware of). RepRapFirmware supports all of them.
Edited 3 time(s). Last edit at 07/10/2020 01:59PM by dc42.
Large delta printer [miscsolutions.wordpress.com], E3D tool changer, Robotdigg SCARA printer, Crane Quad and Ormerod
Disclosure: I design Duet electronics and work on RepRapFirmware, [duet3d.com].
|
Re: CoreXYish IDEX July 10, 2020 11:27PM |
Registered: 5 years ago Posts: 10 |
|
Re: CoreXYish IDEX October 15, 2020 09:56AM |
Registered: 7 years ago Posts: 24 |
I'm looking to go IDEX as well with my CoreXY but use the belt routing from a Dual Wire Gantry to control the second X Axis, which can move independent of the coreXY gantry due to the belt routing pattern, I have experience with dual wire gantry as my printer started out as a dual wire gantry and eventually went to CoreXY, but in saying this, with the second X gantry running independent of the coreXY system, you would still need to send Y commands to the main gantry while the second X axis/gantry runs independent is marlin capable of this type of kinematics?
Sorry, only registered users may post in this forum.