Home
>
Reprappers
>
Topic
Large Scale RepRap
Posted by Demented Chihuahua
|
Large Scale RepRap November 15, 2007 01:07AM |
Registered: 16 years ago Posts: 622 |
Hi all,
Sorry for the new thread to follow but it really is rather a different one than previous ones talking about large scale repraps.
This post needs a little history so...I am a student at Oregon Institute of Technology. I found the RepRap project, decided to get involved, started building a RepRap, thought my school should get into the action, suggested to our CAD/CAM professor that they pick up the RepRap, and am negotiating for them to pay for it and give me credit. Whatever the outcome, OIT will have at least one RepRap. In the course of all this I got a few classmates interested in the idea and it was tossed out that we make a large scale RepRap as a manufacturing project in the Spring term.
So that is exactly what we are looking at doing. We want to build a 1 cubic meter print area RepRap. Although, I don't thing it would actually be a REPlicating RAPid prototyper at that point...feh.
I would like ideas and feedback on this "possible" project. So far I am really leaning toward Viktor's setup minus the magnetic joints as it offers a frame that we can easily weld out of common metal available to us for cheap. This begs the question of kinematics for the software and such but I figure that'll be getting worked out as time goes on. What about stepper requirements? We have some pretty beefy ones that we just scavanged out of some old Universal Stereoplotter machines that look like they could move quite a bit of weight.
Anyway, sorry for the long post. I would just like feedback, ideas, suggestions, warnings, etc., from those who know more than me...everyone!
Demented
Sorry for the new thread to follow but it really is rather a different one than previous ones talking about large scale repraps.
This post needs a little history so...I am a student at Oregon Institute of Technology. I found the RepRap project, decided to get involved, started building a RepRap, thought my school should get into the action, suggested to our CAD/CAM professor that they pick up the RepRap, and am negotiating for them to pay for it and give me credit. Whatever the outcome, OIT will have at least one RepRap. In the course of all this I got a few classmates interested in the idea and it was tossed out that we make a large scale RepRap as a manufacturing project in the Spring term.
So that is exactly what we are looking at doing. We want to build a 1 cubic meter print area RepRap. Although, I don't thing it would actually be a REPlicating RAPid prototyper at that point...feh.
I would like ideas and feedback on this "possible" project. So far I am really leaning toward Viktor's setup minus the magnetic joints as it offers a frame that we can easily weld out of common metal available to us for cheap. This begs the question of kinematics for the software and such but I figure that'll be getting worked out as time goes on. What about stepper requirements? We have some pretty beefy ones that we just scavanged out of some old Universal Stereoplotter machines that look like they could move quite a bit of weight.
Anyway, sorry for the long post. I would just like feedback, ideas, suggestions, warnings, etc., from those who know more than me...everyone!
Demented
|
Re: Large Scale RepRap November 15, 2007 01:40AM |
Admin Registered: 16 years ago Posts: 13,884 |
Hi Demented,
... with a tripod setup you can scale up unlimited and use best Kardan-joints or self-made crossed ball-bearing-hinges instead of the magnetic spheres.
The software is on the way, it seems not to be a real problem, to simply convert the cartesic XYZ-paths to ABC-moving, when i use simple trigonometrics ...
By the way - my first home-brewed laser-plotter i build with an orthogonal (cartesic) mechanic, where i used thin steel-wires wound 4 times around a plastic-cylinder, which was gear-driven 40:1 by a small stepper-motor.
If you want, i can sketch the arrangement for the wire-driven XY-stage ...
Viktor
... with a tripod setup you can scale up unlimited and use best Kardan-joints or self-made crossed ball-bearing-hinges instead of the magnetic spheres.
The software is on the way, it seems not to be a real problem, to simply convert the cartesic XYZ-paths to ABC-moving, when i use simple trigonometrics ...
By the way - my first home-brewed laser-plotter i build with an orthogonal (cartesic) mechanic, where i used thin steel-wires wound 4 times around a plastic-cylinder, which was gear-driven 40:1 by a small stepper-motor.
If you want, i can sketch the arrangement for the wire-driven XY-stage ...
Viktor
|
Re: Large Scale RepRap November 15, 2007 07:44AM |
Registered: 16 years ago Posts: 622 |
|
Re: Large Scale RepRap November 15, 2007 11:44AM |
Registered: 16 years ago Posts: 447 |
Regarding scaling up the motors...
I have this half-thought-out idea of a system that uses cheap stepper motors for positional accuracy and larger DC motors for torque. The larger motor would track the position of the stepper through some sort of feedback mechanism. Sort of a power steering linkage for stepper motors.
The first implementation I came up with was to mount a center-off dpdt switch on the shaft so that the stepper toggles the switch as it rotates relative to the DC motor. Very crude and brute-force, plus the wiring would get tangled.
Another mechanical approach would be to attach the stepper and DC motors to the two axles of a differential gear and use the drive shaft to control the direction and speed of the DC motor. As long as the two motors are counter-rotating at the same speed, the drive shaft should be stationary. Probably a bit too fiddly to be practical.
There's probably some way to do it with optical tracking but nothing springs to mind at the moment.
I have this half-thought-out idea of a system that uses cheap stepper motors for positional accuracy and larger DC motors for torque. The larger motor would track the position of the stepper through some sort of feedback mechanism. Sort of a power steering linkage for stepper motors.
The first implementation I came up with was to mount a center-off dpdt switch on the shaft so that the stepper toggles the switch as it rotates relative to the DC motor. Very crude and brute-force, plus the wiring would get tangled.
Another mechanical approach would be to attach the stepper and DC motors to the two axles of a differential gear and use the drive shaft to control the direction and speed of the DC motor. As long as the two motors are counter-rotating at the same speed, the drive shaft should be stationary. Probably a bit too fiddly to be practical.
There's probably some way to do it with optical tracking but nothing springs to mind at the moment.
|
Re: Large Scale RepRap November 15, 2007 11:59AM |
Admin Registered: 16 years ago Posts: 13,884 |
|
Re: Large Scale RepRap November 15, 2007 12:28PM |
Admin Registered: 16 years ago Posts: 13,884 |
Hi Demented,
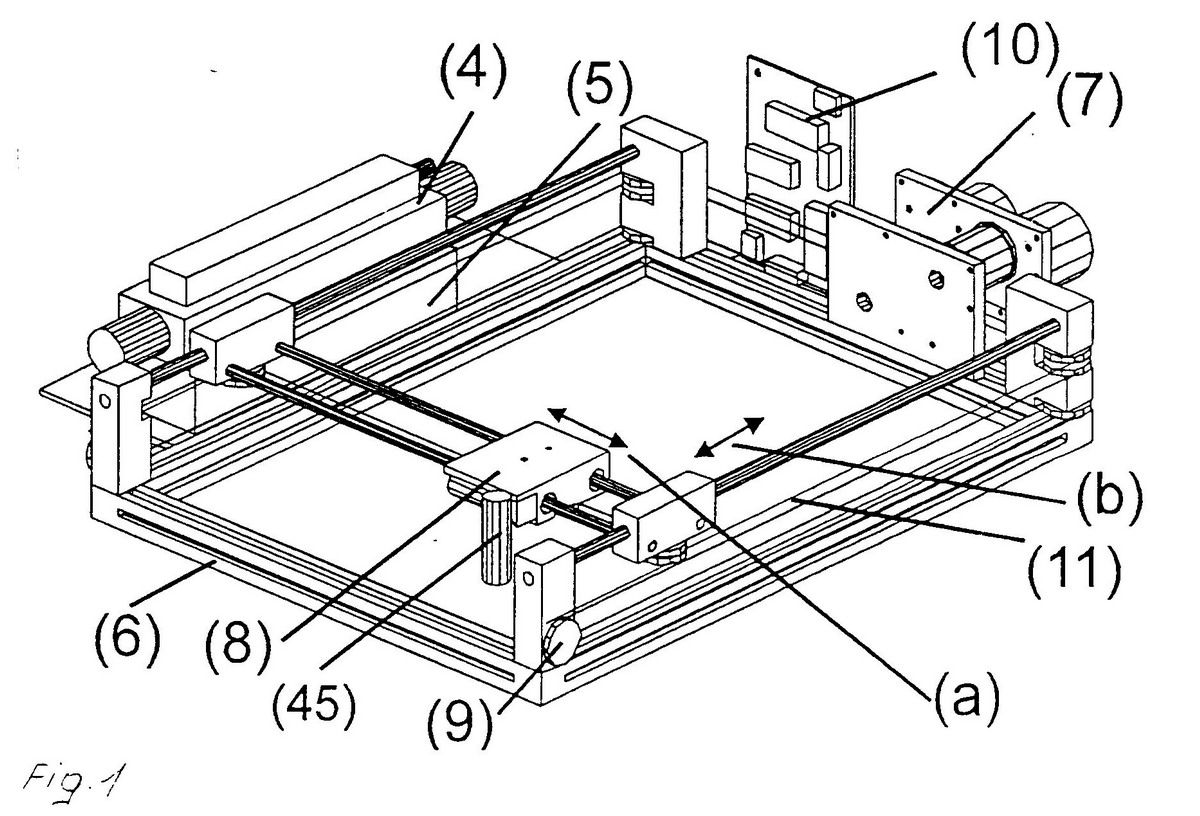
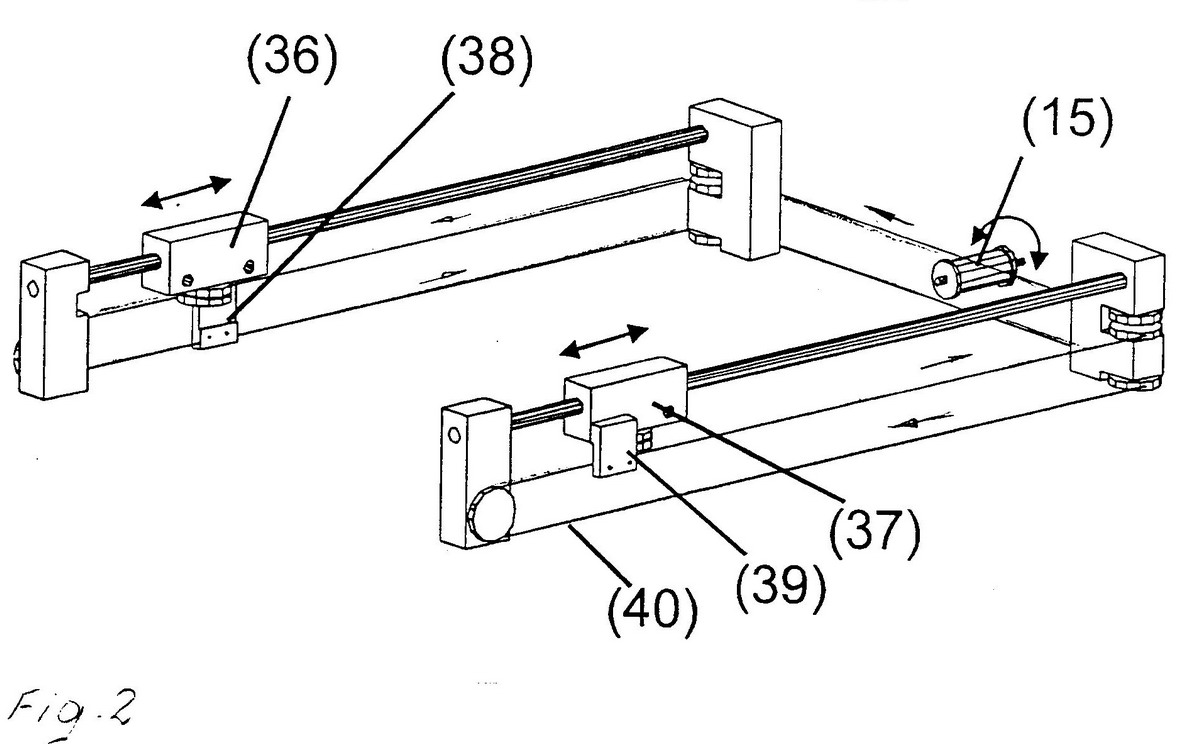
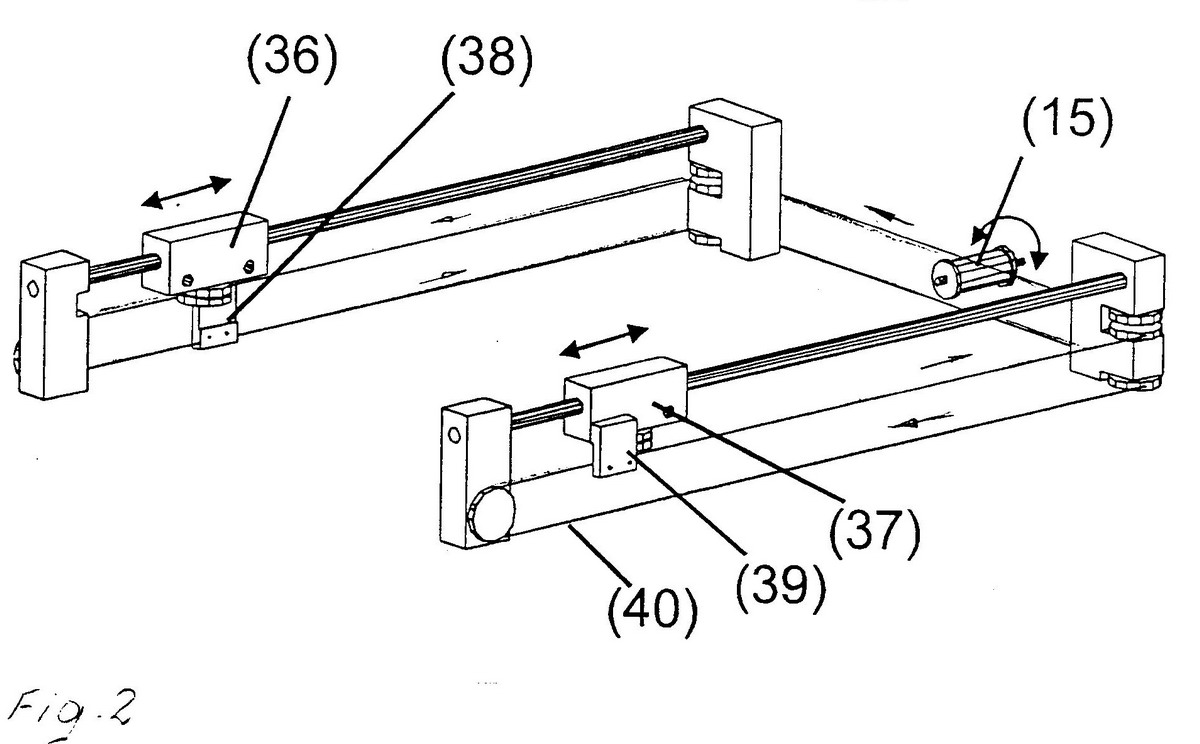
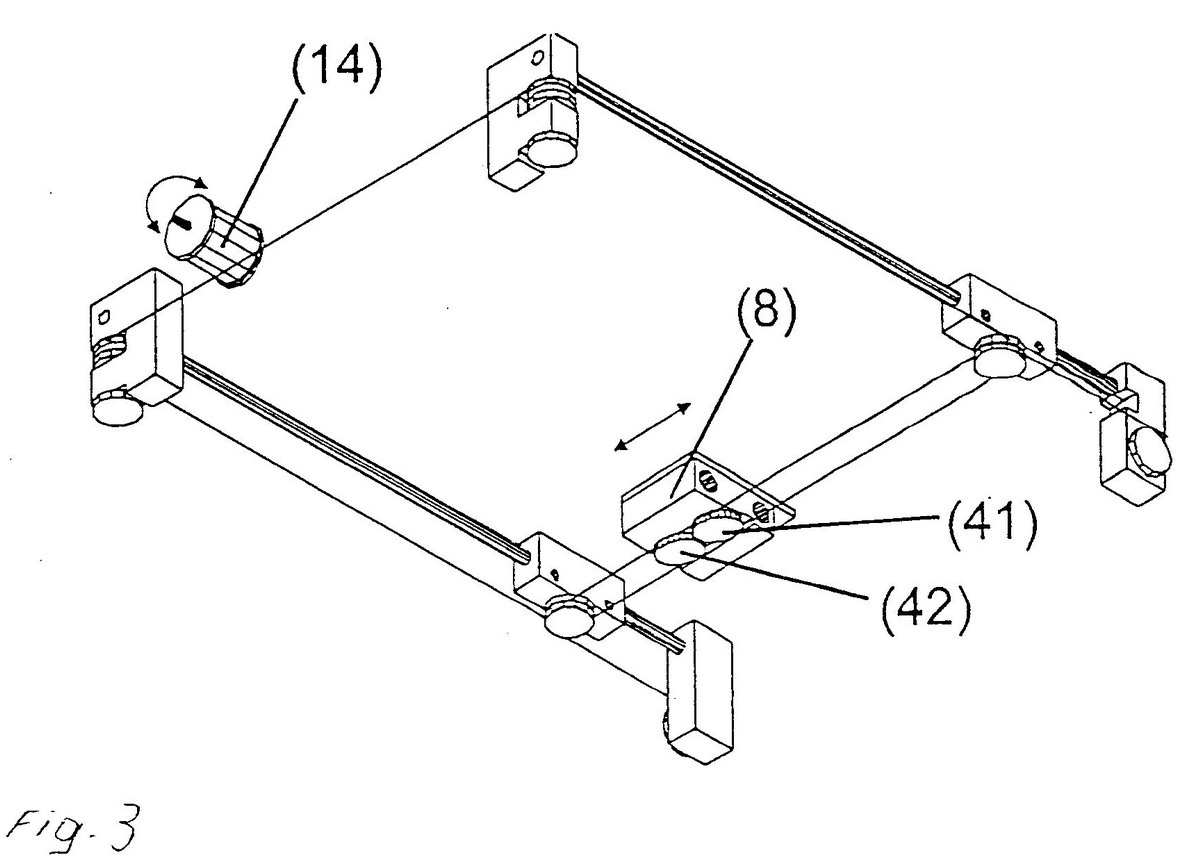
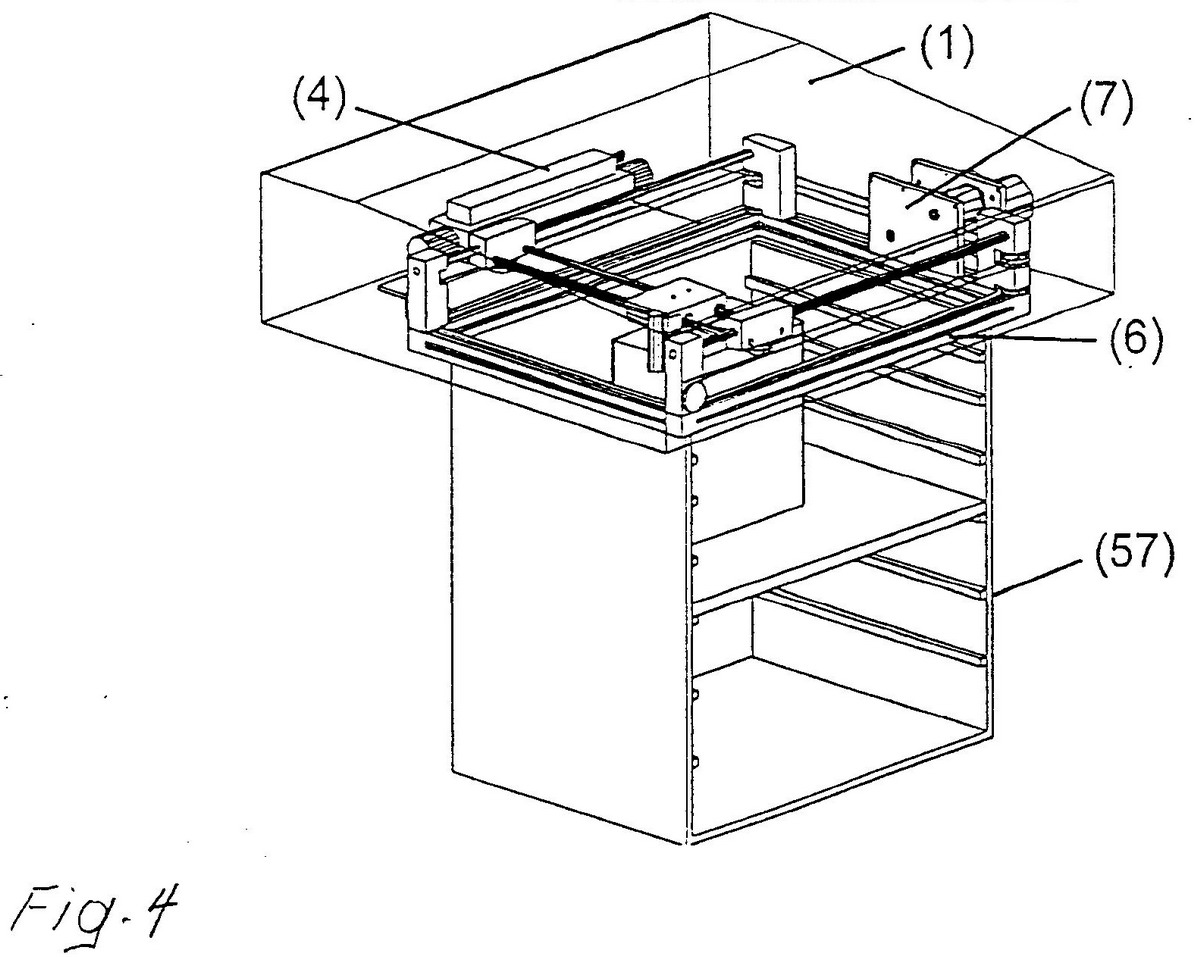
... here are scans of my sketches for the laser-plotter, i've made for the copyright-documents in 1995.
The first similar concept for a simple pen-plotter i build in '80 or so.
Ask me, if something isn't clear ...
Viktor
... here are scans of my sketches for the laser-plotter, i've made for the copyright-documents in 1995.
The first similar concept for a simple pen-plotter i build in '80 or so.
Ask me, if something isn't clear ...
Viktor
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
|
Re: Large Scale RepRap November 15, 2007 12:44PM |
Registered: 16 years ago Posts: 447 |
VDX Wrote:
-------------------------------------------------------
> I think it's easier and cheaper to build a servo
> with a radial or linear measure, then the tandem
> of stepper and a 'following' DC-motor ...
>
Probably true. I keep thinking of shaft-encoder motors as expensive. When I first started in the business, printer manufacturers were switching from shaft encoders to stepper motors because they were cheaper. Now, though, the electronics for a shaft encoder is cheap enough that it's starting to swing the other way again.
-------------------------------------------------------
> I think it's easier and cheaper to build a servo
> with a radial or linear measure, then the tandem
> of stepper and a 'following' DC-motor ...
>
Probably true. I keep thinking of shaft-encoder motors as expensive. When I first started in the business, printer manufacturers were switching from shaft encoders to stepper motors because they were cheaper. Now, though, the electronics for a shaft encoder is cheap enough that it's starting to swing the other way again.
|
Re: Large Scale RepRap November 15, 2007 06:09PM |
Registered: 16 years ago Posts: 246 |
Something else to consider.
How about putting your traditional reprap motors on a robot that can only traverse over about a one yard area, but with no "cage" to interfere on five of the six sides, then making that the toolhead of a much larger robot. I'd say make the larger robot a gantry style, but with a moving gantry. That way you can double, or even triple up on the gantries to build things faster. Furthermore, you should have at least two extruders. A course one for fast laydown, and a fine one to finish out the last quarter inch or so.
In my opinion.
How about putting your traditional reprap motors on a robot that can only traverse over about a one yard area, but with no "cage" to interfere on five of the six sides, then making that the toolhead of a much larger robot. I'd say make the larger robot a gantry style, but with a moving gantry. That way you can double, or even triple up on the gantries to build things faster. Furthermore, you should have at least two extruders. A course one for fast laydown, and a fine one to finish out the last quarter inch or so.
In my opinion.
|
Re: Large Scale RepRap November 15, 2007 10:22PM |
Registered: 16 years ago Posts: 622 |
Viktor,
Thanks for the sketches. I don't think any of that scales up as large as we want though. Would be really finicky.
Steve,
I think we just found some steppers with shaft encoders attached to them. They look rather expensive but not very accurate. We'll know what to do with them more later on.
Sean,
Yes, we were thinking the same thing as far as a course and fine print head. Print heads are fairly cheap and easy to build so we might actually think about putting three or four course heads on there and three or four fine heads. Maybe that is a bit extreme but I don't see as how it really matters with our setup. Once RepRap has truly earned the Rep part of its name, it will be a trivial matter to lay 10 on there. Just a matter of cost of materials.
As for the robot part...are you speaking of an arm-style robot? I hadn't thought of putting the print head on an arm. Could work out well. Anyway, the problem has been solved enough times in industry to mean that there is a large body of existing knowledge on it. I'll look into that more.
Demented
Thanks for the sketches. I don't think any of that scales up as large as we want though. Would be really finicky.
Steve,
I think we just found some steppers with shaft encoders attached to them. They look rather expensive but not very accurate. We'll know what to do with them more later on.
Sean,
Yes, we were thinking the same thing as far as a course and fine print head. Print heads are fairly cheap and easy to build so we might actually think about putting three or four course heads on there and three or four fine heads. Maybe that is a bit extreme but I don't see as how it really matters with our setup. Once RepRap has truly earned the Rep part of its name, it will be a trivial matter to lay 10 on there. Just a matter of cost of materials.
As for the robot part...are you speaking of an arm-style robot? I hadn't thought of putting the print head on an arm. Could work out well. Anyway, the problem has been solved enough times in industry to mean that there is a large body of existing knowledge on it. I'll look into that more.
Demented
|
Re: Large Scale RepRap November 16, 2007 01:23AM |
Admin Registered: 16 years ago Posts: 13,884 |
Hi Demented,
> Thanks for the sketches. I don't think any of that
> scales up as large as we want though. Would be
> really finicky.
... of course, when i was counterchecking other patents for my claims, then i found only one similar construction: this was a ship-container-handling bridge-robot with 30 metres length and 7 metres height !!!
So the up-scaling isn't the problem ...
Viktor
> Thanks for the sketches. I don't think any of that
> scales up as large as we want though. Would be
> really finicky.
... of course, when i was counterchecking other patents for my claims, then i found only one similar construction: this was a ship-container-handling bridge-robot with 30 metres length and 7 metres height !!!
So the up-scaling isn't the problem ...
Viktor
|
Re: Large Scale RepRap November 16, 2007 05:52PM |
Registered: 16 years ago Posts: 246 |
Actually, I meant to not narrow the definition too much.
articulated arm...cartesian coordinate system...Victor's current toy...the radial concept being played around in another thread...all qualify as a "robot".
Point is, put a small scale unit on the end of a much larger scale unit, and give it some means of determining exactly where it is, even if the larger scale unit can't actually get it in position all that accurately. What's a decimeter more or less, if you have a square meter working area that can be moved to any point within a larger framework?
articulated arm...cartesian coordinate system...Victor's current toy...the radial concept being played around in another thread...all qualify as a "robot".
Point is, put a small scale unit on the end of a much larger scale unit, and give it some means of determining exactly where it is, even if the larger scale unit can't actually get it in position all that accurately. What's a decimeter more or less, if you have a square meter working area that can be moved to any point within a larger framework?
|
Re: Large Scale RepRap November 29, 2007 11:38AM |
Registered: 16 years ago Posts: 622 |
Sean,
Nice. I have been thinking about something similar recently. An arm on a rail. The arm-rail combo can print another rail that is almost two 'arms' longer than the original. Same idea with a circular rail. Gives an easy way to scale up and down. What I hadn't thought about is an accurate positioning method. I suppose giving them some way to triangulate themselves would do it. Say, sensors placed in various places that it poles to triangulate it's current position. Very nice idea.
Demented
Nice. I have been thinking about something similar recently. An arm on a rail. The arm-rail combo can print another rail that is almost two 'arms' longer than the original. Same idea with a circular rail. Gives an easy way to scale up and down. What I hadn't thought about is an accurate positioning method. I suppose giving them some way to triangulate themselves would do it. Say, sensors placed in various places that it poles to triangulate it's current position. Very nice idea.
Demented
|
Re: Large Scale RepRap November 29, 2007 02:42PM |
Admin Registered: 16 years ago Posts: 13,884 |
... you must think of the fabbing-time too ...
If a decimeter-cubicle needs half'n hour (or even longer with better accuracy) to build, then a very big object with the same precision can eat weeks or months of time fabbing!
And look on the material-amount and possible malfuctions in the support.
For seriously speeding up the fabbing proces without losses in accuracy i hope to manage foil-lathe-fabbing (with laser-cutting endless sheets) or IR-melting of complete powder-slices in a flash, when i peviously inkjet-printed separating lines in the powder-surface ...
This should be thousandfold faster, as i have to process only the outline/separating points, as the inner points are already solid (in the foil-lathe) or will be melted and sintered by the IR-heater all at once ...
But it's a hard sideway, so let me spend some more time until it comes true
Viktor
If a decimeter-cubicle needs half'n hour (or even longer with better accuracy) to build, then a very big object with the same precision can eat weeks or months of time fabbing!
And look on the material-amount and possible malfuctions in the support.
For seriously speeding up the fabbing proces without losses in accuracy i hope to manage foil-lathe-fabbing (with laser-cutting endless sheets) or IR-melting of complete powder-slices in a flash, when i peviously inkjet-printed separating lines in the powder-surface ...
This should be thousandfold faster, as i have to process only the outline/separating points, as the inner points are already solid (in the foil-lathe) or will be melted and sintered by the IR-heater all at once ...
But it's a hard sideway, so let me spend some more time until it comes true
Viktor
|
Re: Large Scale RepRap November 29, 2007 03:12PM |
Registered: 16 years ago Posts: 20 |
|
Re: Large Scale RepRap November 30, 2007 12:52AM |
Admin Registered: 17 years ago Posts: 1,791 |
Demented, I'd avoid building an arm until after building a more traditional mill or gantry-type machine. Arms have less precison because they're missing all that cross-bracing. A typical big industrial robot has a precision of maybe 0.050". If you compare that to a homebrewed cnc machine, which should get a precision of ~0.010" easily.
I'm not saying that building a robot arm isn't a fascinating and worthwile task, only that it's a more difficult problem. Consider setting up two representative machines and measuring a 1-2-3 block to test the squareness of the machines. The cartesian machine has some measurable non-orthogonality, so you shim it or tap it with a dead blow hammer. Now think about the arm.
I know nothing about the precision of parallel or hybrid robots, and my only experience with series robots is taking a course on them which included cowriting a paper on making them more precise.
Edited 1 time(s). Last edit at 11/30/2007 02:53PM by SebastienBailard.
I'm not saying that building a robot arm isn't a fascinating and worthwile task, only that it's a more difficult problem. Consider setting up two representative machines and measuring a 1-2-3 block to test the squareness of the machines. The cartesian machine has some measurable non-orthogonality, so you shim it or tap it with a dead blow hammer. Now think about the arm.
I know nothing about the precision of parallel or hybrid robots, and my only experience with series robots is taking a course on them which included cowriting a paper on making them more precise.
Edited 1 time(s). Last edit at 11/30/2007 02:53PM by SebastienBailard.
|
Re: Large Scale RepRap November 30, 2007 01:28AM |
Admin Registered: 16 years ago Posts: 13,884 |
Hi Sebastien,
... look on the figures 4 and 5 in the paper [www.harmonicdrive.de]
Here is shown, how much preciser a parallelised scara-robot is, in respect to the serial setup ...
Viktor
... look on the figures 4 and 5 in the paper [www.harmonicdrive.de]
Here is shown, how much preciser a parallelised scara-robot is, in respect to the serial setup ...
Viktor
Sorry, only registered users may post in this forum.