Home
>
Reprappers
>
Topic
TB6600 stepper driver Ramps 1.4 connection
Posted by norkator
|
TB6600 stepper driver Ramps 1.4 connection February 10, 2016 12:35PM |
Registered: 8 years ago Posts: 5 |
Hey, I need some help with connecting TB6600 stepper driver into Ramps 1.4 board.
TB6600 signal inputs are following and these are taken from the picture above.
ENA- / EN-
DIR- / CW-
PUL- / CLK-
+5v / +5v
Enable: ENA- goes Ramps 1.4 stepper driver pin EN ?
Direction: DIR- goes to DIR ?
So where PUL- and +5v goes?
Here's the picture of this TB6600
Thank you for your answers in advance!
TB6600 signal inputs are following and these are taken from the picture above.
ENA- / EN-
DIR- / CW-
PUL- / CLK-
+5v / +5v
Enable: ENA- goes Ramps 1.4 stepper driver pin EN ?
Direction: DIR- goes to DIR ?
So where PUL- and +5v goes?
Here's the picture of this TB6600
Thank you for your answers in advance!
|
Re: TB6600 stepper driver Ramps 1.4 connection February 10, 2016 01:01PM |
Registered: 13 years ago Posts: 632 |
You are on the right track. Pul is the step pulse also known as the clock pulse or CLK. and +5v needs 5V power from wherever you want to supply 5V power from. Be aware that the enable pin may be inverted from the pololu drivers. You'll want to get hold of a datasheet and check to see if the driver is enabled when EN is high or when EN is low.
|
Re: TB6600 stepper driver Ramps 1.4 connection February 10, 2016 01:09PM |
Registered: 8 years ago Posts: 5 |
Thank you for your reply, I keep this in my mind. I'm going to dig this problem deep before testing, last thing I want to do is to fry ramps, arduino or stepper driver. If there's correct answers before I get my ramps, I'll make tests and post results here. If I got it working I'll post correct wiring method here.
|
Re: TB6600 stepper driver Ramps 1.4 connection February 11, 2016 12:13PM |
Registered: 10 years ago Posts: 550 |
The pictures on forum might help [roboforum.ru] or [andre.team9.99.org.nz]
Edited 1 time(s). Last edit at 02/11/2016 12:15PM by Frans@France.
Edited 1 time(s). Last edit at 02/11/2016 12:15PM by Frans@France.
|
Re: TB6600 stepper driver Ramps 1.4 connection February 13, 2016 08:31AM |
Registered: 8 years ago Posts: 5 |
Thanks Frans for that link.
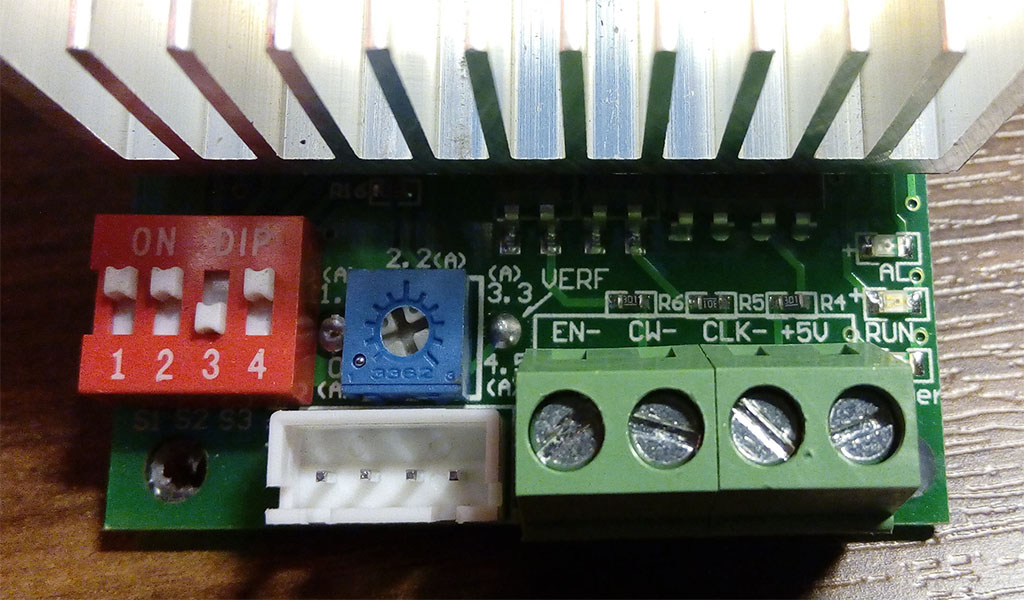
Here's picture of my TB6600, there's no + and - signal inputs like other tbs have, only - inputs and that one +5v. I get my ramps on Monday so it is either going to work or it's going to smoke. That roboforum.ru link seems to be very helpful.
Those - signal inputs all goes to three different components before going to Toshiba driver and some chinese instructions that come with the driver says something like this:
5.CLK-:Stepping pulse input+5V (Rising edge effective , rising edge duration >10μS)
6.CW-:Stepping motor direction input, voltage level touched off, high level foreward , low level reverse
7.ENA-: motor free
8. +5V: Signal common terminal
I post my results here on Monday.
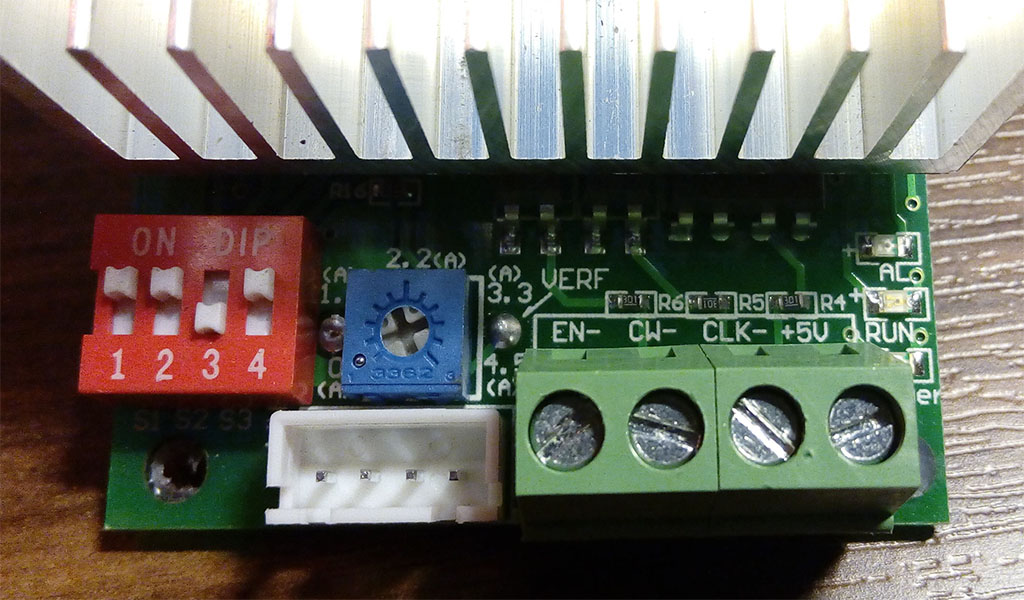
Here's picture of my TB6600, there's no + and - signal inputs like other tbs have, only - inputs and that one +5v. I get my ramps on Monday so it is either going to work or it's going to smoke. That roboforum.ru link seems to be very helpful.
Those - signal inputs all goes to three different components before going to Toshiba driver and some chinese instructions that come with the driver says something like this:
5.CLK-:Stepping pulse input+5V (Rising edge effective , rising edge duration >10μS)
6.CW-:Stepping motor direction input, voltage level touched off, high level foreward , low level reverse
7.ENA-: motor free
8. +5V: Signal common terminal
I post my results here on Monday.
{kind=link}
{kind=link}
|
Re: TB6600 stepper driver Ramps 1.4 connection February 14, 2016 05:22AM |
Registered: 10 years ago Posts: 550 |
|
Re: TB6600 stepper driver Ramps 1.4 connection February 14, 2016 12:45PM |
Registered: 8 years ago Posts: 5 |
|
Re: TB6600 stepper driver Ramps 1.4 connection February 16, 2016 03:28AM |
Registered: 8 years ago Posts: 5 |
I did not get it to work. Wired everything up but nothing happened, it's like there's ground missing. I tested many time, swapped cables and so on. This TB is weird compared to other TB drivers, but it works well with CNC machine controller. Good thing is that I did not fried anything so I just decided to use a4988 stepsticks for now.
|
Re: TB6600 stepper driver Ramps 1.4 connection February 16, 2016 05:18AM |
Registered: 10 years ago Posts: 550 |
Just wired it to a Arduino board directly so you can write your own code, that will allow you to control the pulse length. It would also allow you to test if the EN must be high or low to enable the driver.
I used a TB6560 without any problems.
Edited 1 time(s). Last edit at 02/16/2016 05:19AM by Frans@France.
I used a TB6560 without any problems.
Edited 1 time(s). Last edit at 02/16/2016 05:19AM by Frans@France.
|
Re: TB6600 stepper driver Ramps 1.4 connection September 23, 2016 08:02AM |
Registered: 9 years ago Posts: 9 |
hi i am trying to connect a pibot 2.2 driver ( [www.pibot.com] ) to ramps1.4.
I think the enable is inverted since it only works with enable disconnected .... any way to fix this in marlin ?
I enabled "#define CONFIG_STEPPERS_TOSHIBA" in the firmware didnt see any change....
any ideas?
I think the enable is inverted since it only works with enable disconnected .... any way to fix this in marlin ?
I enabled "#define CONFIG_STEPPERS_TOSHIBA" in the firmware didnt see any change....
any ideas?
|
Re: TB6600 stepper driver Ramps 1.4 connection September 23, 2016 12:35PM |
Registered: 12 years ago Posts: 548 |
|
Re: TB6600 stepper driver Ramps 1.4 connection September 23, 2016 05:21PM |
Registered: 9 years ago Posts: 221 |
Quote
Frans@France
Just wired it to a Arduino board directly so you can write your own code, that will allow you to control the pulse length. It would also allow you to test if the EN must be high or low to enable the driver.
I used a TB6560 without any problems.
Hi Frans, would you be able to share your coding as you stated ..."you can write your own code, that will allow you to control the pulse length..."
i am interested to see what i have to do to upgrade to a bigger stepper but not changing the Ramps board...
Merci bien!
Sorry, only registered users may post in this forum.