|
Core ZXZY Build Log January 20, 2023 12:22AM |
Registered: 1 year ago Posts: 3 |
|
Re: Core ZXZY Build Log January 20, 2023 02:50AM |
Registered: 10 years ago Posts: 14,672 |
|
Re: Core ZXZY Build Log January 20, 2023 03:22AM |
Registered: 9 years ago Posts: 31 |
Quote
dc42
Looks interesting! As the kinematics is linear, RepRapFirmware supports it already, without even having to recompile.
|
Re: Core ZXZY Build Log January 20, 2023 02:12PM |
Registered: 1 year ago Posts: 3 |
Quote
dc42
Looks interesting! As the kinematics is linear, RepRapFirmware supports it already, without even having to recompile.
|
Re: Core ZXZY Build Log January 21, 2023 08:04AM |
Registered: 11 years ago Posts: 5,780 |
|
Re: Core ZXZY Build Log January 25, 2023 01:32AM |
Registered: 1 year ago Posts: 3 |
Quote
the_digital_dentist
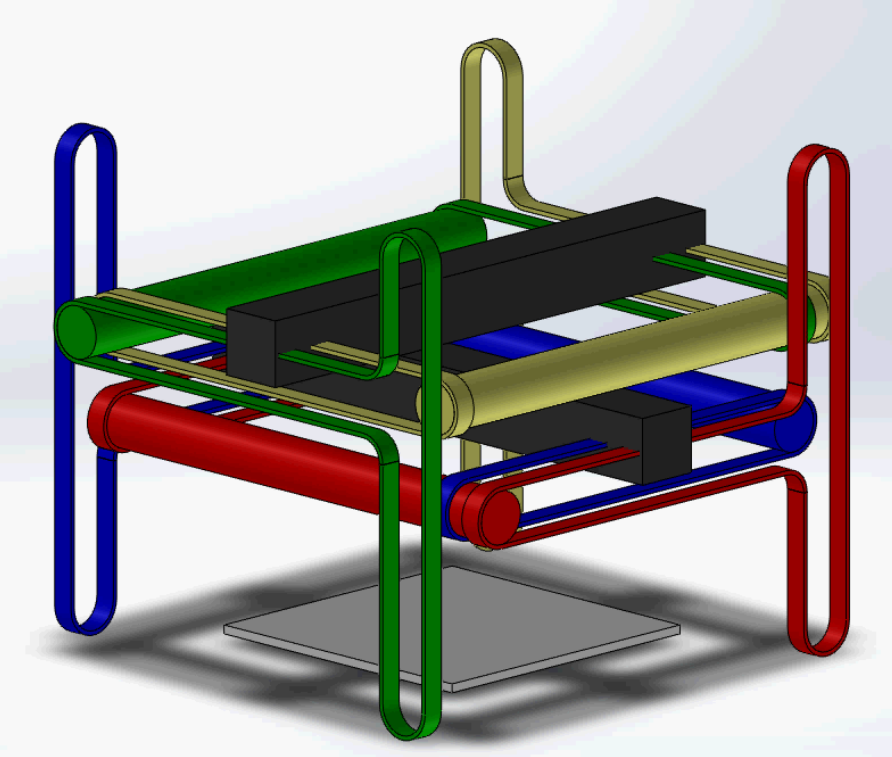
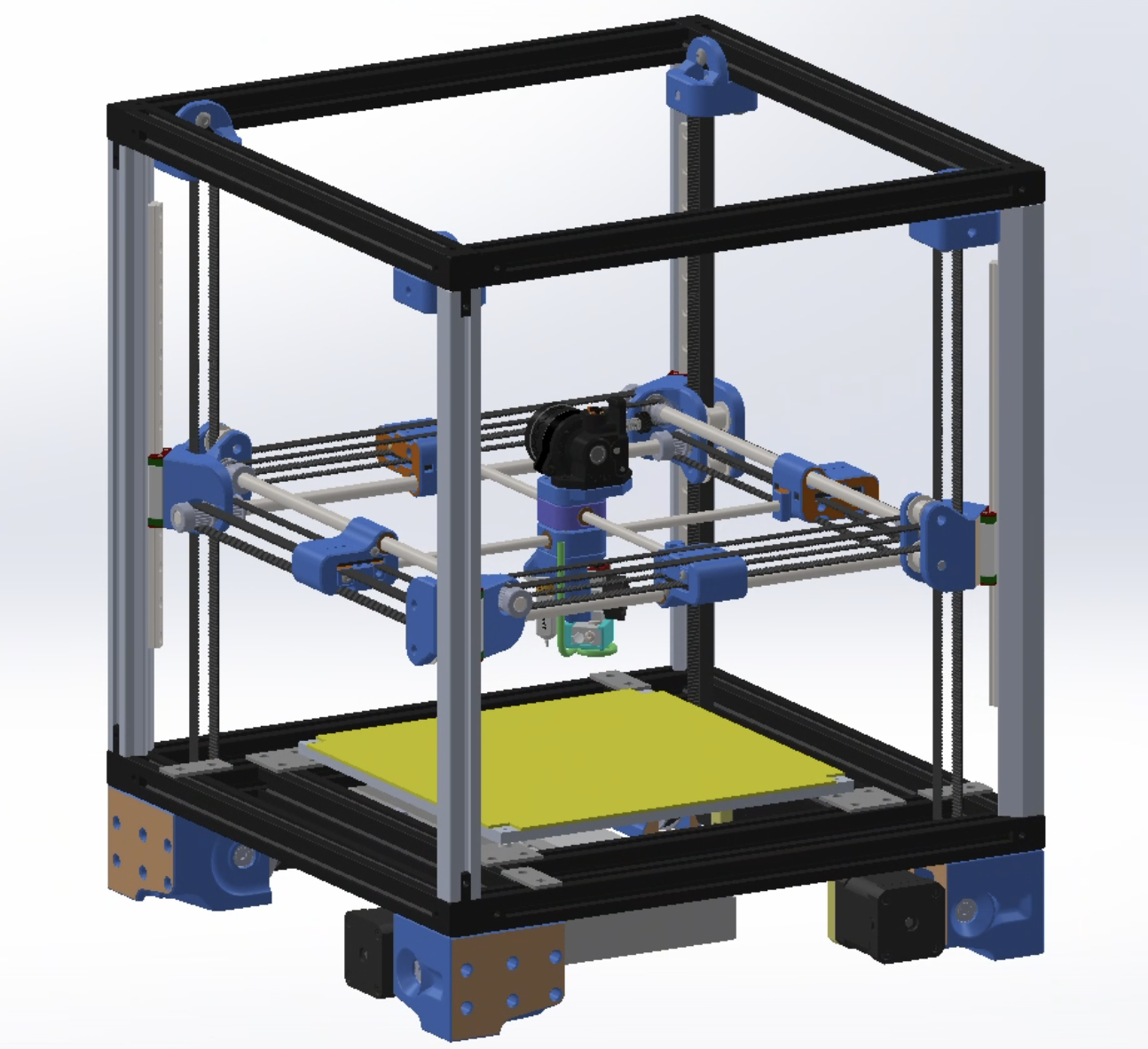
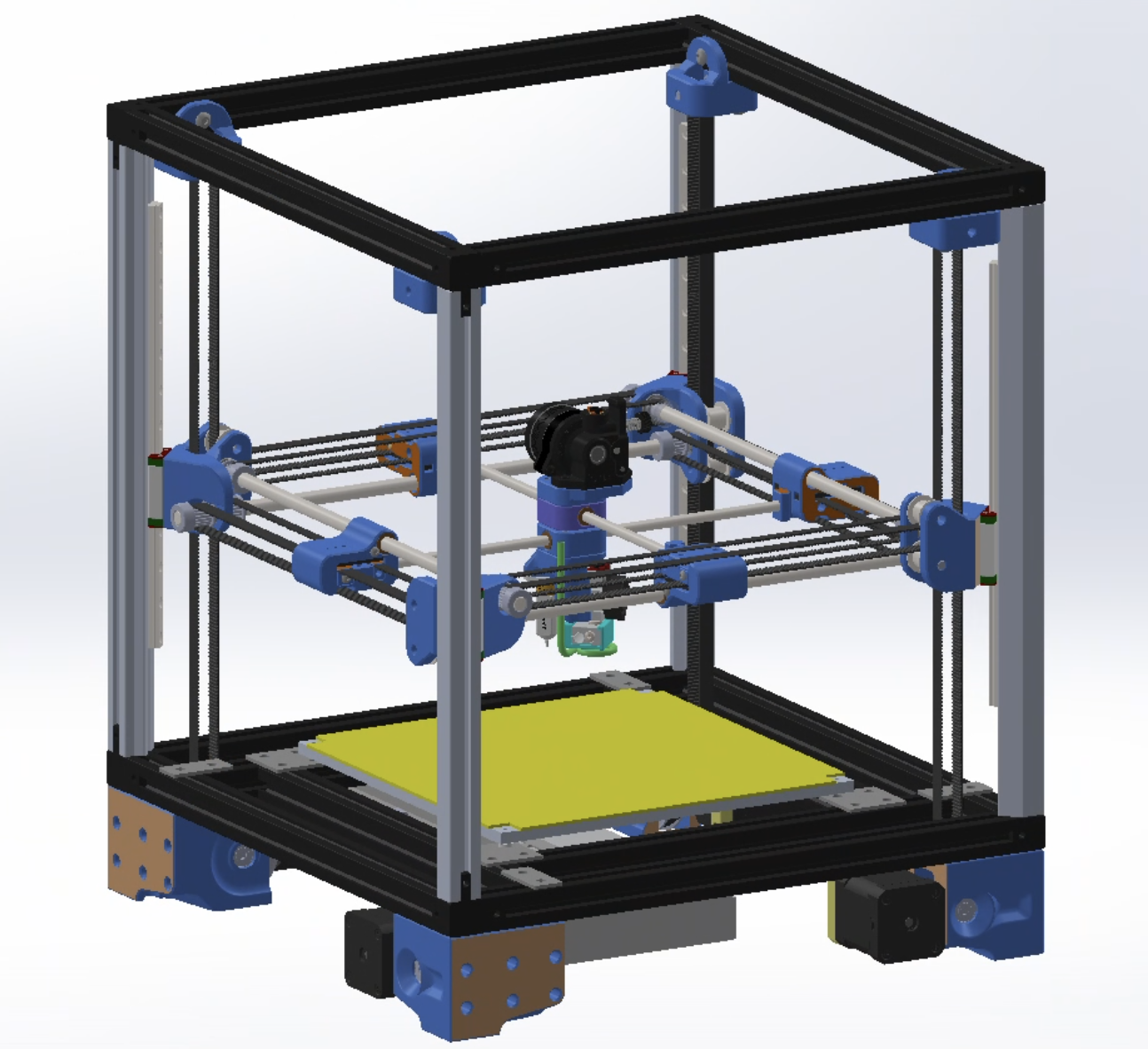
A couple years ago, while watching my very large corexy sand table mechanism running, I noticed some wobble in the X axis as the carriage moved in X. That got me suspecting something similar could happen in the corexy stage of my 3D printer so I set up a gauge and measured it. I found wobble in the positions of the X axis along the Y axis that appeared to be a function of an imperfectly drilled drive pulley. In my printer the error occurs in XY motion and affects the accuracy, but not the precision of the mechanism. With your design I can see similar wobble occurring in the Z axis, but in two mechanisms with 4 belts and drive pulleys doing the Z lift, I think you're creating an unstable platform where both the accuracy and precision may be affected by any imperfections (poorly drilled pulleys, belts not perfectly parallel to the Z axis guide rails, etc.) in the drive mechanism. All four corners of the xy extruder stage have to lift the exact same amount or the xy stage will wobble in Z.
Quote
the_digital_dentist
Does this have some not-immediately-obvious advantage over the more traditional implementation of a corexy mechanism with a separate Z axis?
{kind=link}
{kind=link}
{kind=link}
{kind=link}