Home
>
RepRap User Groups
>
Europe
>
Italy RepRap User Group - Gruppo RepRap Italia
>
Discussioni generali - NO PROBLEMI DELLA STAMPANTE
>
Topic
>
Page 31
R2 Evo di NicolaP Thread Ufficiale
Posted by goryc
|
Re: R2 Evo di NicolaP Thread Ufficiale March 17, 2019 03:35PM |
Registered: 8 years ago Posts: 380 |
|
Re: R2 Evo di NicolaP Thread Ufficiale March 18, 2019 04:34AM |
Registered: 8 years ago Posts: 380 |
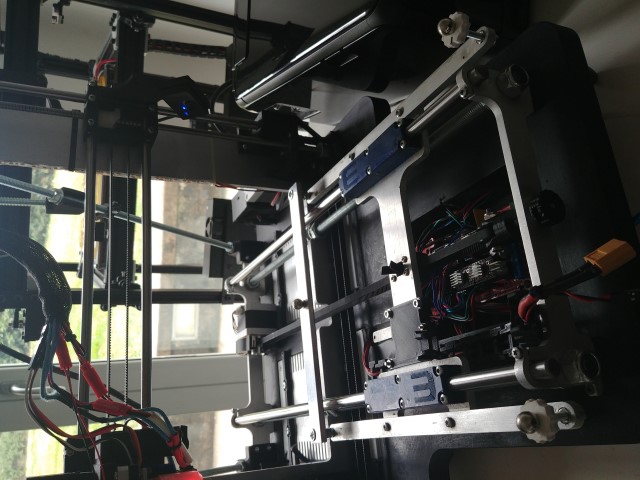
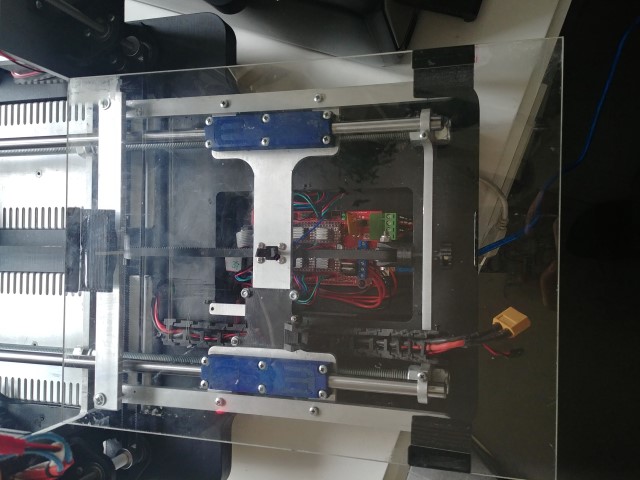
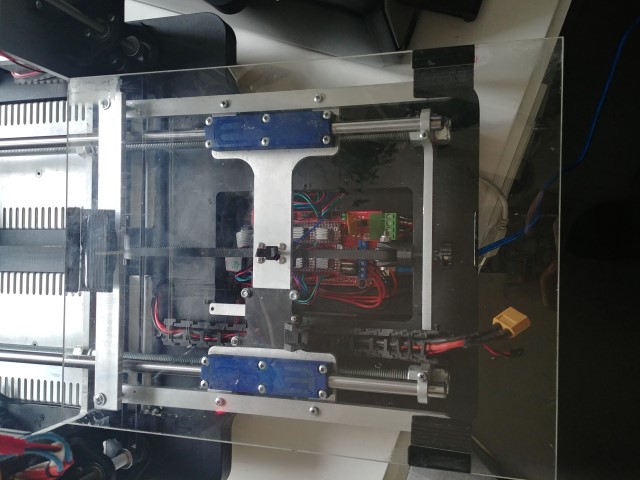
La modifica e' stata semplice . Ho scelto l' approccio piu' conservativo inserendo una barra rialzata sull' asse corto opposto all' origine.
Il vantaggio e' che la modifica e' completamente reversibile e facile da realizzare , lo svantaggio e' che si perdono circa 15mm sull' asse Z e che le viti di regolazione sono molto piu' lunghe delle originale potendo risultare una struttura meno rigida.
L' alternativa potrebbe essere utilizzare le due viti originale da un lato dell' asse y creando un nuovo punto di regolazione al centro del lato opposto della y forando e inserendo un nuovo autobloccante semplicemente accanto alle guide y non perdendo estensione in Z e mantenendo i supporti piano piú corti.
Sono ancora in fase di test ma la regolazione sembra molto piú rapida anche se per adesso non sono riuscito avere un piano calibrato al 100%.
Edited 1 time(s). Last edit at 03/18/2019 10:38AM by claustro.
Il vantaggio e' che la modifica e' completamente reversibile e facile da realizzare , lo svantaggio e' che si perdono circa 15mm sull' asse Z e che le viti di regolazione sono molto piu' lunghe delle originale potendo risultare una struttura meno rigida.
L' alternativa potrebbe essere utilizzare le due viti originale da un lato dell' asse y creando un nuovo punto di regolazione al centro del lato opposto della y forando e inserendo un nuovo autobloccante semplicemente accanto alle guide y non perdendo estensione in Z e mantenendo i supporti piano piú corti.
Sono ancora in fase di test ma la regolazione sembra molto piú rapida anche se per adesso non sono riuscito avere un piano calibrato al 100%.
Edited 1 time(s). Last edit at 03/18/2019 10:38AM by claustro.
|
Re: R2 Evo di NicolaP Thread Ufficiale March 18, 2019 09:56AM |
Registered: 9 years ago Posts: 3,268 |
Hai fatto la modifica in maniera diversa rispetto a come l'avevo fatta io. Praticamente io avevo messo una nuova vite a metà del terzo lato, tu hai messo una striscia di metallo regolata dalle viti su cui è posta la sfera che regge il piatto.
Probabilmente è per questo che funziona, oltre al fatto che non hai molle.
Alessandro
Prusa I3 Rework molto modificata - Taurino Classic - Ramps 1.4 - Driver DVR8825 - Titan Extruder e Hotend E3D V6 - Bltouch originale - Firmware MarlinKimbra - Cura - Repetier Host
Probabilmente è per questo che funziona, oltre al fatto che non hai molle.
Alessandro
Prusa I3 Rework molto modificata - Taurino Classic - Ramps 1.4 - Driver DVR8825 - Titan Extruder e Hotend E3D V6 - Bltouch originale - Firmware MarlinKimbra - Cura - Repetier Host
|
Re: R2 Evo di NicolaP Thread Ufficiale March 18, 2019 10:33AM |
Registered: 6 years ago Posts: 43 |
Quote
claustro
La modifica e' stata semplice . Ho scelto l' arroccio piu conservativo inserendo una barra rialzata sull' asse corto opposto all' origine.
Il vantaggio e' che la modifica e' completamente reversibile e facile da realizzare , lo svantaggio e' che si perdono circa 15mm sull' asse Z e che le viti di regolazione sono molto piu' lunghe delle originale potendo risultare una struttura meno rigida.
L' alternativa potrebbe essere utilizzare le due viti originale da un lato dell' asse y creando un nuovo punto di regolazione al centro del lato opposto della y forando e inserendo un nuovo autobloccante semplicemente accanto alle guide y non perdendo estensione in Z e mantenendo i supporti piano piú corti.
Sono ancora in fase di test ma la regolazione sembra molto piú rapida anche se per adesso non sono riuscito avere un piano calibrato al 100%.
ma non hai il piatto riscaldato?
|
Re: R2 Evo di NicolaP Thread Ufficiale March 18, 2019 10:39AM |
Registered: 8 years ago Posts: 380 |
|
Re: R2 Evo di NicolaP Thread Ufficiale March 18, 2019 11:17AM |
Registered: 6 years ago Posts: 43 |
|
Re: R2 Evo di NicolaP Thread Ufficiale March 18, 2019 11:49AM |
Registered: 8 years ago Posts: 380 |
Ancora non ho fatto a tenpo a testarlo per dare un giudizio approfondito ,ho finito di montarlo ieri sera, di sicuro il sistema a 3 punti e geometricamente piú coerente rispetto ad uno a 4 motivo vi terro' aggiornati anche se la modifica e' talemnte facile che non vedo motivi validi per i quali non ci si debba provare,
|
Re: R2 Evo di NicolaP Thread Ufficiale March 18, 2019 11:57AM |
Registered: 6 years ago Posts: 43 |
dai attendiamo un tuo riscontro ^_^. io invece volevo eliminare le calamite, modificare stl originale e creare un supporto da incollare al piatto riscaldato e sopra un vetro da 4mm.... ovviamente ad avere il tempo :-(Quote
claustro
Ancora non ho fatto a tenpo a testarlo per dare un giudizio approfondito ,ho finito di montarlo ieri sera, di sicuro il sistema a 3 punti e geometricamente piú coerente rispetto ad uno a 4 motivo vi terro' aggiornati anche se la modifica e' talemnte facile che non vedo motivi validi per i quali non ci si debba provare,
|
Re: R2 Evo di NicolaP Thread Ufficiale April 10, 2019 04:50AM |
Registered: 8 years ago Posts: 380 |
Vi aggiorno su qualche novita'.
Questione carrello storto..
Continua la sperimentazione con il bed a tre punti
Ho cambiato il posizionamento dei tre punti di regolazione migliorando molto la regolazione.
Adesso le viti sono a meta del PIATTO ( non del carrello) lato sinistro , ed estremi del carrello sul lato destro .
...................................RIFERIMENTO
ROLL
...................................PITCH
Il mio piatto e'un borosilicato da 3mm. e nonostante con tre punti sia INFINITAMENTE piu' facile da livellare e meno stressante per la struttura , continuo ad avere un dislivello di almeno 0.6 / 0.7 mm
Se questo dipenda dal vetro non perfetto, da un componente piegato o da qualche errore nel montaggio ancora non l'hon capito anche se il fatto che abbia convissuto con questo problema dall' inizio fa propendere piú per la terza.
Ho mandato un emaii a Nicola che si e' reso disponibile ad inviarmi una flowchart per cercare di trovare una soluzione al fatto che il mio piatto di stampa risulti cosi' storto a patto che torni a una configurazione a 4 punto di regolazione , ho dato la mia disponibilita' a farlo , basta togliere e rimettere due viti . Sono in attesa di una sua risposta.
Qualcun' altro ha avuto problemi simili ai miei ? Ha risolto?
Questione firmware.
Sto cercando di aggiornare il firmare a MK4duo 3.2.9 sono a buon punto funziona UBL , baby stepping, Junction deviation anche se da calibrare e verificarne il funzionamento.
Sto avendo qualche problema con i motori a cui vanno riviste velocitá e accelerazioni ma ci dovrei arrivare.
Ieri ho stampato un Benchy che e' venuto discretamente nonostante la retraction zoppa per i problemi di cui sopra.
Se qualcuno ha aggiornato o sta aggiornando il firmware batta un colpo che magari ci scambiamo qualche idea.
Ho ristampato diverse parti che sono state aggiornate nel corso del tempo e che si erano usurate.
Edited 1 time(s). Last edit at 04/10/2019 04:50AM by claustro.
Questione carrello storto..
Continua la sperimentazione con il bed a tre punti
Ho cambiato il posizionamento dei tre punti di regolazione migliorando molto la regolazione.
Adesso le viti sono a meta del PIATTO ( non del carrello) lato sinistro , ed estremi del carrello sul lato destro .
...................................RIFERIMENTO
ROLL
...................................PITCH
Il mio piatto e'un borosilicato da 3mm. e nonostante con tre punti sia INFINITAMENTE piu' facile da livellare e meno stressante per la struttura , continuo ad avere un dislivello di almeno 0.6 / 0.7 mm
Se questo dipenda dal vetro non perfetto, da un componente piegato o da qualche errore nel montaggio ancora non l'hon capito anche se il fatto che abbia convissuto con questo problema dall' inizio fa propendere piú per la terza.
Ho mandato un emaii a Nicola che si e' reso disponibile ad inviarmi una flowchart per cercare di trovare una soluzione al fatto che il mio piatto di stampa risulti cosi' storto a patto che torni a una configurazione a 4 punto di regolazione , ho dato la mia disponibilita' a farlo , basta togliere e rimettere due viti . Sono in attesa di una sua risposta.
Qualcun' altro ha avuto problemi simili ai miei ? Ha risolto?
Questione firmware.
Sto cercando di aggiornare il firmare a MK4duo 3.2.9 sono a buon punto funziona UBL , baby stepping, Junction deviation anche se da calibrare e verificarne il funzionamento.
Sto avendo qualche problema con i motori a cui vanno riviste velocitá e accelerazioni ma ci dovrei arrivare.
Ieri ho stampato un Benchy che e' venuto discretamente nonostante la retraction zoppa per i problemi di cui sopra.
Se qualcuno ha aggiornato o sta aggiornando il firmware batta un colpo che magari ci scambiamo qualche idea.
Ho ristampato diverse parti che sono state aggiornate nel corso del tempo e che si erano usurate.
Edited 1 time(s). Last edit at 04/10/2019 04:50AM by claustro.
|
Re: R2 Evo di NicolaP Thread Ufficiale April 11, 2019 03:18AM |
Registered: 8 years ago Posts: 380 |
Ho ricevuto risposta ieri da Nicola posto qui la procedura da fare visto che potrebbe fare comodo a qualcun' altro
Edited 1 time(s). Last edit at 04/11/2019 03:18AM by claustro.
Togli i due bracci dal carrello Y e spostalo dietro. Prendi il piatto di stampa e appoggialo dal lato vetro (sottosopra) direttamente sulle guide Y; se "balla" significa che l'asse è in torsione, quindi fa l'effetto "catena DNA" e quando si sposta cambia le geometrie.
Edited 1 time(s). Last edit at 04/11/2019 03:18AM by claustro.
|
Re: R2 Evo di NicolaP Thread Ufficiale December 09, 2019 03:04PM |
Registered: 8 years ago Posts: 54 |
Un saluto!
Non frequentavo più queste pagine da tanto, visto che fortunatamente fino all'altro giorno tutti i problemi della stampante erano di poco conto e risolvibili senza aiuti esterni
Purtroppo, l'altro giorno la macchina, a metà di una stampa, ha smesso di estrudere filamento.
Da allora, sul 90% delle prove di stampa fatte successivamente. dopo la messa in temperatura dell'hotend, invece di fare quel "purge" di 1cm di filamento e iniziare a stampare, fa un piccola retrazione (o nulla del tutto), inizia a viaggiare sulle X e sulle Y ma l'estrusore è morto
Il restante 10% sembra partire bene ma l'estrusore muore dopo poco, con la testina che viaggia su X e Y come se niente fosse.
Ho fatto le seguenti prove:
- non è un problema di sensore filo, perché l'ho direttamente cortocircuitato sulla scheda fin dall'inizio
- tramite il comando >prepara>muovi assi>1mm>estrusore il motore funziona senza problemi e estrude il filamento
- ho invertito il motore dell'estrusore con quello delle X e il problema si ripropone invariato
- ho fatto delle stampe "vecchie" che avevo sull'SD, che avevo portato a termine con successo, ma il problema si ripropone
A questo punto concludo che il problema si debba trovare nella scheda di comando (Arduino?), ma non so come procedere
Non ho trovato la procedura per reinstallare il firmware (giusto?) sulla scheda, e non so se ne sarei in grado, visto che vado abbastanza con la meccanica, ma con l'informatica molto meno.
Chi mi sa aiutare?
Non frequentavo più queste pagine da tanto, visto che fortunatamente fino all'altro giorno tutti i problemi della stampante erano di poco conto e risolvibili senza aiuti esterni
Purtroppo, l'altro giorno la macchina, a metà di una stampa, ha smesso di estrudere filamento.
Da allora, sul 90% delle prove di stampa fatte successivamente. dopo la messa in temperatura dell'hotend, invece di fare quel "purge" di 1cm di filamento e iniziare a stampare, fa un piccola retrazione (o nulla del tutto), inizia a viaggiare sulle X e sulle Y ma l'estrusore è morto
Il restante 10% sembra partire bene ma l'estrusore muore dopo poco, con la testina che viaggia su X e Y come se niente fosse.
Ho fatto le seguenti prove:
- non è un problema di sensore filo, perché l'ho direttamente cortocircuitato sulla scheda fin dall'inizio
- tramite il comando >prepara>muovi assi>1mm>estrusore il motore funziona senza problemi e estrude il filamento
- ho invertito il motore dell'estrusore con quello delle X e il problema si ripropone invariato
- ho fatto delle stampe "vecchie" che avevo sull'SD, che avevo portato a termine con successo, ma il problema si ripropone
A questo punto concludo che il problema si debba trovare nella scheda di comando (Arduino?), ma non so come procedere
Non ho trovato la procedura per reinstallare il firmware (giusto?) sulla scheda, e non so se ne sarei in grado, visto che vado abbastanza con la meccanica, ma con l'informatica molto meno.
Chi mi sa aiutare?
|
Re: R2 Evo di NicolaP Thread Ufficiale December 10, 2019 07:57AM |
Registered: 9 years ago Posts: 3,268 |
in attesa che qualche esperto di r2 ti risponda, posso proporti un paio di verifiche:
prova a comandare la stampante da repetier host, i modo da vedere se segnala qualche errore e se la temperatura è stabile
controlla se è il motore dell'estrusore che non gira oppure se gira ma non trascina il filo (ad esempio se la vite che trascina il filo è "intasata" e slitta)
Come estrema soluzione potresti impostare l'estrusore su E2 per vedere se è un problema di elettronica, ma credo si possa fare solo mettendo mano al firmware.
Il firmware non dovrebbe corrompersi con il tempo, hai la versione fornita con la stampante? altrimenti sul configuratore di mk c'è un preset della r2: [www.marlinkimbra.it]
Alessandro
Prusa I3 Rework molto modificata - Taurino Classic - Ramps 1.4 - Driver DVR8825 - Titan Extruder e Hotend E3D V6 - Bltouch originale - Firmware MarlinKimbra - Cura - Repetier Host
prova a comandare la stampante da repetier host, i modo da vedere se segnala qualche errore e se la temperatura è stabile
controlla se è il motore dell'estrusore che non gira oppure se gira ma non trascina il filo (ad esempio se la vite che trascina il filo è "intasata" e slitta)
Come estrema soluzione potresti impostare l'estrusore su E2 per vedere se è un problema di elettronica, ma credo si possa fare solo mettendo mano al firmware.
Il firmware non dovrebbe corrompersi con il tempo, hai la versione fornita con la stampante? altrimenti sul configuratore di mk c'è un preset della r2: [www.marlinkimbra.it]
Alessandro
Prusa I3 Rework molto modificata - Taurino Classic - Ramps 1.4 - Driver DVR8825 - Titan Extruder e Hotend E3D V6 - Bltouch originale - Firmware MarlinKimbra - Cura - Repetier Host
|
Re: R2 Evo di NicolaP Thread Ufficiale December 10, 2019 09:40AM |
Registered: 8 years ago Posts: 54 |
Grazie della risposta:
- proverò con repetier, anche se non lo tocco da 3 o 4 anni, non credo di ricordarmi come si fa: avresti un link?
- il motore dell'estrusore è ok
- interessante l'idea di impostare l'estrusore su E2, vedrò come fare
- il firmware è nella versione fornita con la stampante
Riguardo all'ultimo punto, e al fatto che il firmware non dovrebbe corrompersi, ricordo una massima tra le mie preferite: "la differenza tra teoria e pratica è che teoricamente non dovrebbe esserci differenza, ma in pratica c'è"
Luca
- proverò con repetier, anche se non lo tocco da 3 o 4 anni, non credo di ricordarmi come si fa: avresti un link?
- il motore dell'estrusore è ok
- interessante l'idea di impostare l'estrusore su E2, vedrò come fare
- il firmware è nella versione fornita con la stampante
Riguardo all'ultimo punto, e al fatto che il firmware non dovrebbe corrompersi, ricordo una massima tra le mie preferite: "la differenza tra teoria e pratica è che teoricamente non dovrebbe esserci differenza, ma in pratica c'è"
Luca
|
Re: R2 Evo di NicolaP Thread Ufficiale December 10, 2019 12:41PM |
Registered: 9 years ago Posts: 3,268 |
Non ho una guida per repetier (non so se è presente nella guida della R2), comunque non è difficile.
Se hai installato Arduino IDE dovresti già avere i driver per arduino mega (o clone), quindi basta installare Repetier host e connetterlo alla stampante. Forse dovrai cambiare il baudrate nelle impostazioni di Repetier (mettendo lo stesso del firmware, di solito 115200 o 250000), e anche indicargli su quale porta è collegato Arduino, se non la riconosce automaticamente. Altro da impostare (per poter collegare la stampante) non mi viene in mente. Una volta fatto click sull'icona connetti, basta che vai su comandi manuali. Nel log in basso vedi i comandi e gli errori della stampante mentre nella finestra delle temperature vedi le letture dei sensori.
Quanto ho chiesto se avevi il firmware consegnato con la stampante, intendevo dire se hai una copia sul pc di quello che è sulla scheda. Se hai una copia di quello che al momento funziona (a parte il problema che riscontri), puoi fare tutti gli esperimenti che vuoi con il firmware, perchè mal che vada rimetti quello "originale".
Per caricare il firmware nella scheda avrai bisogno di Arduino IDE, sia che tu voglia reinstallare quello originale, sia che tu ne voglia provare uno nuovo (e anche qui dovrai impostare baudrate, tipo di scheda e porta).
Per impostare l'estrusore su E2, puoi andare sul configuratore del Mago, scegli un preset per la tua R2 (o carichi la tua, se è possibile) e poi modifichi la posizione dell'hotend (se non erro basta che cambi il driver dell'estrusore da e0 a e1, ma non ne sono certo, è da provare. A proposito, hai provato a scambiare due driver tra loro? se hai un tester dovresti anche controllare la vref dei driver)
Alessandro
Prusa I3 Rework molto modificata - Taurino Classic - Ramps 1.4 - Driver DVR8825 - Titan Extruder e Hotend E3D V6 - Bltouch originale - Firmware MarlinKimbra - Cura - Repetier Host
Se hai installato Arduino IDE dovresti già avere i driver per arduino mega (o clone), quindi basta installare Repetier host e connetterlo alla stampante. Forse dovrai cambiare il baudrate nelle impostazioni di Repetier (mettendo lo stesso del firmware, di solito 115200 o 250000), e anche indicargli su quale porta è collegato Arduino, se non la riconosce automaticamente. Altro da impostare (per poter collegare la stampante) non mi viene in mente. Una volta fatto click sull'icona connetti, basta che vai su comandi manuali. Nel log in basso vedi i comandi e gli errori della stampante mentre nella finestra delle temperature vedi le letture dei sensori.
Quanto ho chiesto se avevi il firmware consegnato con la stampante, intendevo dire se hai una copia sul pc di quello che è sulla scheda. Se hai una copia di quello che al momento funziona (a parte il problema che riscontri), puoi fare tutti gli esperimenti che vuoi con il firmware, perchè mal che vada rimetti quello "originale".
Per caricare il firmware nella scheda avrai bisogno di Arduino IDE, sia che tu voglia reinstallare quello originale, sia che tu ne voglia provare uno nuovo (e anche qui dovrai impostare baudrate, tipo di scheda e porta).
Per impostare l'estrusore su E2, puoi andare sul configuratore del Mago, scegli un preset per la tua R2 (o carichi la tua, se è possibile) e poi modifichi la posizione dell'hotend (se non erro basta che cambi il driver dell'estrusore da e0 a e1, ma non ne sono certo, è da provare. A proposito, hai provato a scambiare due driver tra loro? se hai un tester dovresti anche controllare la vref dei driver)
Alessandro
Prusa I3 Rework molto modificata - Taurino Classic - Ramps 1.4 - Driver DVR8825 - Titan Extruder e Hotend E3D V6 - Bltouch originale - Firmware MarlinKimbra - Cura - Repetier Host
|
Re: R2 Evo di NicolaP Thread Ufficiale December 11, 2019 04:46AM |
Registered: 8 years ago Posts: 54 |
|
Re: R2 Evo di NicolaP Thread Ufficiale December 11, 2019 05:52AM |
Registered: 9 years ago Posts: 3,268 |
Se vuoi provare da solo non leggere quanto segue:
L'elettronica più usata nelle stampanti 3d è una specie di panino, alla base c'è una Arduino mega o un clone, su cui è posta un'altra scheda che si chiama Ramps, sulla Ramps sono montati i driver.
[ae01.alicdn.com]
[www.google.com]
Non ho una r2, ma l'elettronica dovrebbe essere di questo tipo. Un tentativo che dovresti fare è scambiare tra loro due driver (quello di un'asse che funziona con quello dell'estrusore), per vedere se il problema è il driver. Delicatamente "tiri" verso l'alto i driver, sconnettendoli dalla ramps e il scambi (mettendoli sempre nello stesso verso).
Per la vref dei driver la questione è leggermente più complicata. I driver mandano corrente al motore, ma dato che esistono motori di vaio tipo, come fare a mandare la quantità giusta di corrente necessaria a quel motore? Per questo motivo sui driver c'è una piccola vite che svolge questo compito. I tuoi driver sono stati tarati da Nicola P, ma con il tempo potrebbero essersi starati.
Una guida alla taratura (serve un tester, il valore dipende dal tipo di driver e dai motori):
[www.ivanbortolin.it]
[www.ivanbortolin.it]
Se il driver è mal funzionante o starato, non invia abbastanza corrente al motore. Te ne accorgi perchè il motore non gira oppure perde passi (gira ma non ha abbastanza forza per trascinare il filo).
Alla fine devi ingegnarti e capire perchè il filo non viene estruso. è un problema di estrusore, di elettronica o di software/firmware? il motore gira? e se si, ha abbastanza forza? Guardandola mentre stampa dovresti capirlo.
Alessandro
Prusa I3 Rework molto modificata - Taurino Classic - Ramps 1.4 - Driver DVR8825 - Titan Extruder e Hotend E3D V6 - Bltouch originale - Firmware MarlinKimbra - Cura - Repetier Host
L'elettronica più usata nelle stampanti 3d è una specie di panino, alla base c'è una Arduino mega o un clone, su cui è posta un'altra scheda che si chiama Ramps, sulla Ramps sono montati i driver.
[ae01.alicdn.com]
[www.google.com]
Non ho una r2, ma l'elettronica dovrebbe essere di questo tipo. Un tentativo che dovresti fare è scambiare tra loro due driver (quello di un'asse che funziona con quello dell'estrusore), per vedere se il problema è il driver. Delicatamente "tiri" verso l'alto i driver, sconnettendoli dalla ramps e il scambi (mettendoli sempre nello stesso verso).
Per la vref dei driver la questione è leggermente più complicata. I driver mandano corrente al motore, ma dato che esistono motori di vaio tipo, come fare a mandare la quantità giusta di corrente necessaria a quel motore? Per questo motivo sui driver c'è una piccola vite che svolge questo compito. I tuoi driver sono stati tarati da Nicola P, ma con il tempo potrebbero essersi starati.
Una guida alla taratura (serve un tester, il valore dipende dal tipo di driver e dai motori):
[www.ivanbortolin.it]
[www.ivanbortolin.it]
Se il driver è mal funzionante o starato, non invia abbastanza corrente al motore. Te ne accorgi perchè il motore non gira oppure perde passi (gira ma non ha abbastanza forza per trascinare il filo).
Alla fine devi ingegnarti e capire perchè il filo non viene estruso. è un problema di estrusore, di elettronica o di software/firmware? il motore gira? e se si, ha abbastanza forza? Guardandola mentre stampa dovresti capirlo.
Alessandro
Prusa I3 Rework molto modificata - Taurino Classic - Ramps 1.4 - Driver DVR8825 - Titan Extruder e Hotend E3D V6 - Bltouch originale - Firmware MarlinKimbra - Cura - Repetier Host
|
Re: R2 Evo di NicolaP Thread Ufficiale January 22, 2020 04:03AM |
Registered: 9 years ago Posts: 860 |
Scusate ragazzi voi che sicuramente come me avete scaricato dal sito di Nicola
I files MarlinKimbraEvo.zip e u8glib_arduino_v1.16.zip
Siete riusciti a compilarli ?
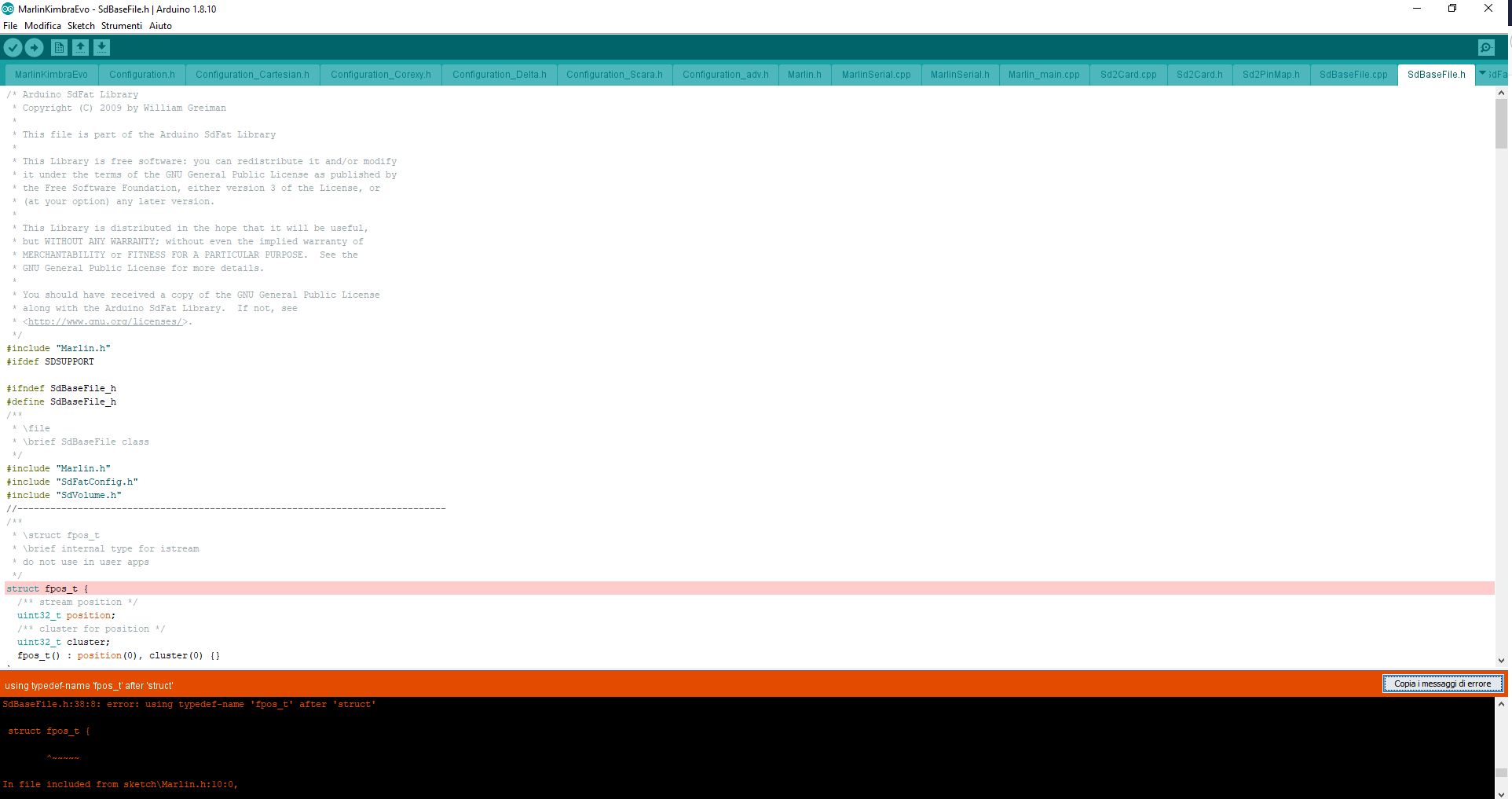
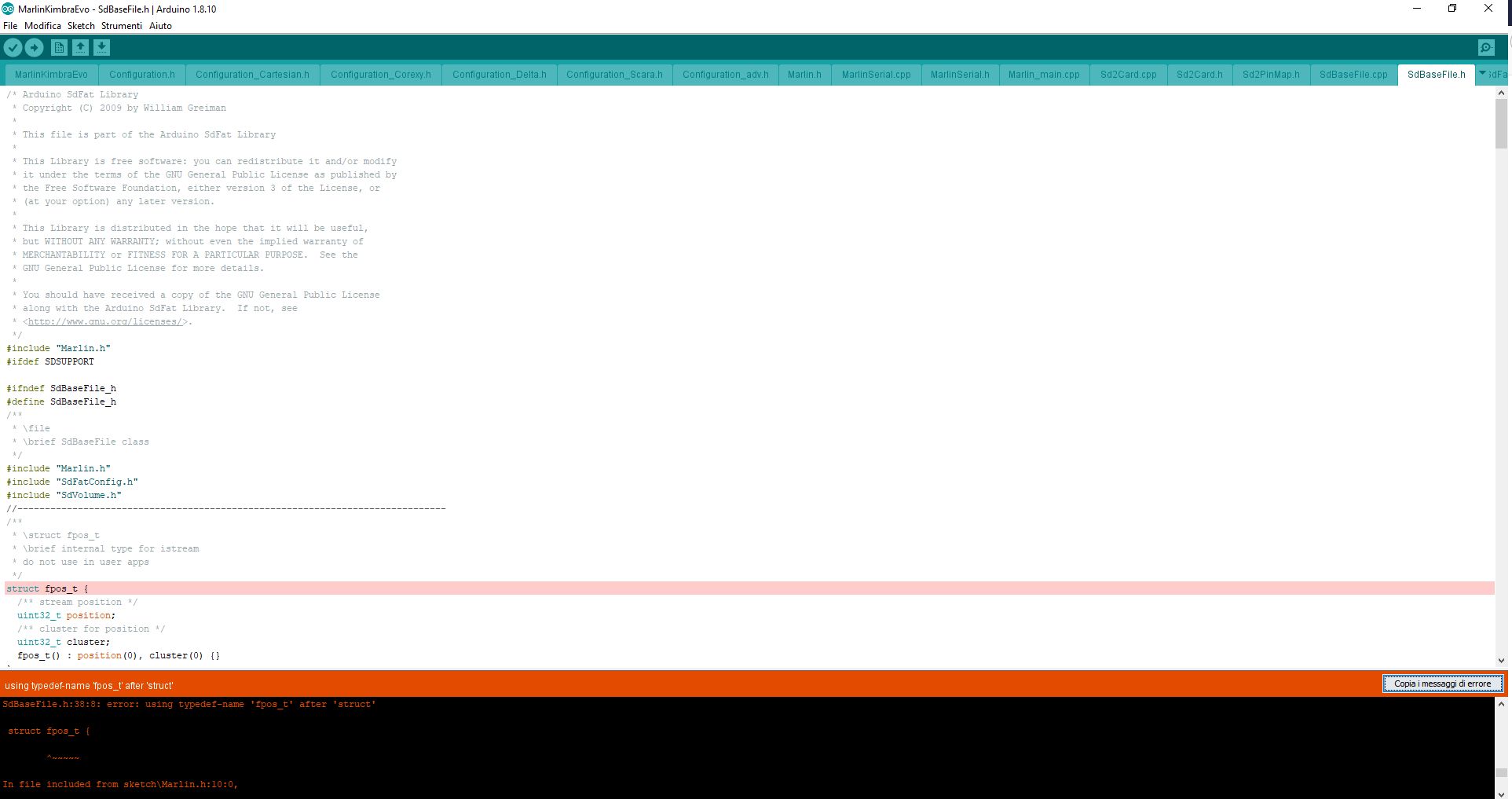
A me da errore come in schermata e come sunto qui sotto sapete dirmi cosa mi manca dove sbaglio ?
www.saviot.com Stampante Prusa I3 R2.2 By Nicola P.
Ramps 1.4 Con FW MarlinKimba Fusore HE IeC 1.75mm Con Flusso Canalizzatore Estrusori BullDog XL
Piano maggiorato 240*311mm pilotato da SSR 24V con letto scaldante autocostruito
Lavori in Corso Prossimetro Autolivellamento Z Gestione Remota Raspberry PI 2 con OctoPrint
Rilevamento ottico Fine Filo Illuminazione e Visione AreaStampa Remotata In costruzione Trafilatore TL-Plastic
I files MarlinKimbraEvo.zip e u8glib_arduino_v1.16.zip
Siete riusciti a compilarli ?
A me da errore come in schermata e come sunto qui sotto sapete dirmi cosa mi manca dove sbaglio ?
Arduino:1.8.10 (Windows 10), Scheda:"Arduino/Genuino Mega or Mega 2560, ATmega2560 (Mega 2560)"
In file included from sketch\SdBaseFile.cpp:24:0:
SdBaseFile.h:38:8: error: using typedef-name 'fpos_t' after 'struct'
struct fpos_t {
^~~~~~
In file included from sketch\Marlin.h:10:0,
from sketch\SdBaseFile.cpp:21:
c:\program files (x86)\arduino\hardware\tools\avr\avr\include\stdio.h:950:33: note: 'fpos_t' has a previous declaration here
__extension__ typedef long long fpos_t;
^~~~~~
sketch\SdBaseFile.cpp: In member function 'void SdBaseFile::getpos(fpos_t*)':
SdBaseFile.cpp:298:8: error: request for member 'position' in '* pos', which is of non-class type 'fpos_t {aka long long int}'
pos->position = curPosition_;
^~~~~~~~
SdBaseFile.cpp:299:8: error: request for member 'cluster' in '* pos', which is of non-class type 'fpos_t {aka long long int}'
pos->cluster = curCluster_;
^~~~~~~
sketch\SdBaseFile.cpp: In member function 'void SdBaseFile::setpos(fpos_t*)':
SdBaseFile.cpp:1496:23: error: request for member 'position' in '* pos', which is of non-class type 'fpos_t {aka long long int}'
curPosition_ = pos->position;
^~~~~~~~
SdBaseFile.cpp:1497:22: error: request for member 'cluster' in '* pos', which is of non-class type 'fpos_t {aka long long int}'
curCluster_ = pos->cluster;
^~~~~~~
In file included from sketch\SdFile.h:27:0,
from sketch\SdFile.cpp:23:
SdBaseFile.h:38:8: error: using typedef-name 'fpos_t' after 'struct'
struct fpos_t {
^~~~~~
In file included from sketch\Marlin.h:10:0,
from sketch\SdFile.cpp:20:
c:\program files (x86)\arduino\hardware\tools\avr\avr\include\stdio.h:950:33: note: 'fpos_t' has a previous declaration here
__extension__ typedef long long fpos_t;
^~~~~~
In file included from sketch\SdFile.h:27:0,
from sketch\cardreader.h:8,
from sketch\Marlin_main.cpp:37:
SdBaseFile.h:38:8: error: using typedef-name 'fpos_t' after 'struct'
struct fpos_t {
^~~~~~
In file included from sketch\Marlin.h:10:0,
from sketch\Marlin_main.cpp:22:
c:\program files (x86)\arduino\hardware\tools\avr\avr\include\stdio.h:950:33: note: 'fpos_t' has a previous declaration here
__extension__ typedef long long fpos_t;
^~~~~~
Più di una libreria trovata per "U8glib.h"
Usata: C:\Users\savio\Documents\Arduino\libraries\U8glib
Non usata: C:\Program
exit status 1
using typedef-name 'fpos_t' after 'struct'
www.saviot.com Stampante Prusa I3 R2.2 By Nicola P.
Ramps 1.4 Con FW MarlinKimba Fusore HE IeC 1.75mm Con Flusso Canalizzatore Estrusori BullDog XL
Piano maggiorato 240*311mm pilotato da SSR 24V con letto scaldante autocostruito
Lavori in Corso Prossimetro Autolivellamento Z Gestione Remota Raspberry PI 2 con OctoPrint
Rilevamento ottico Fine Filo Illuminazione e Visione AreaStampa Remotata In costruzione Trafilatore TL-Plastic
|
Re: R2 Evo di NicolaP Thread Ufficiale March 25, 2020 06:10PM |
Registered: 4 years ago Posts: 9 |
|
Re: R2 Evo di NicolaP Thread Ufficiale March 25, 2020 07:19PM |
Registered: 4 years ago Posts: 9 |
Ragazzi,
io sto mettendo in moto la mia R2 EVO che è stata ferma per un paio d'anni, per via di qualche componente che non andava ma anche per il poco tempo a mia disposizione dopo l'arrivo di 2 figli.....
Per il momento il problema principale che ho è questo:
Dopo aver scaricato e montato il firmware MarlinKimbraEvo_rev.1 versione 4.1.2 (preso dal sito 3DMakerLab di NicolaP) sulla mia R2 EVO tramite Arduino IDE 1.0.6, dopo aver configurato la stampante su Repetier Host come da indicazioni di NicolaP, andando in modalità manuale per fare i test iniziali, dopo aver mandato tutto in home (X, Y, Z), quando poi sposto gli assi, ad esempio X di 50 mm, noto che in realtà si sposta della metà, quindi di soli 25 mm.
Lo stesso accade per gli assi Y e Z.
Prima di decidermi a scrivere questo post ho cercato di documentarmi/approfondire le mie basilari conoscenze e cercare di risolvere la cosa da me senza dare fastidio nel forum.... non ci sono riuscito....
Partendo dal fatto che ho scaricato il firmware ufficiale di NicolaP e che non l'ho praticamente toccato/manipolato vorrei capire insieme al vostro aiuto perchè mi accade questo e come posso risolvere.
Vi do qualche informazione in più:
Ho controllato i motori e confermo che sono tutti dei passo-passo da 1.8° (tutti Wantai tipo Nema 17 42BYGHW609L20P1-X2 tranne quello dell'asse Y che è da 42BYGHW804(T))
Le cinghie sono delle GT2 con pitch di 2 mm
Le puleggie degli assi X e Y hanno 20 denti
Le barre filettate dell'asse Z sono delle M6 con passo da 1 mm
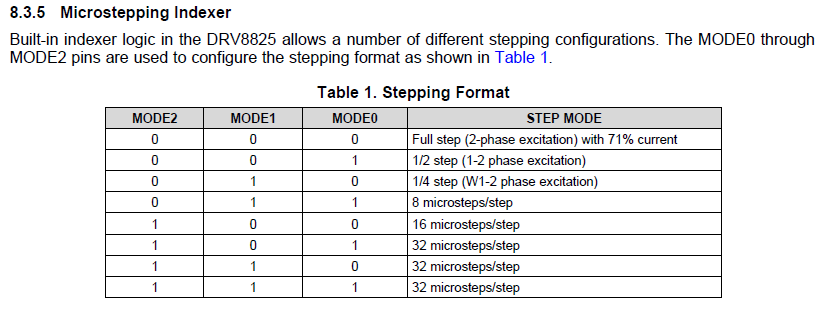
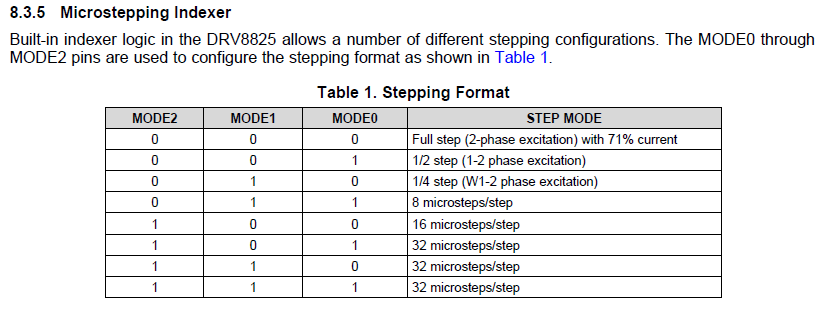
Gli stepper driver dovrebbero essere dei DRV8825 (ma non ne sono sicuro) e se non ho capito male leggendo qua e là nel forum dovrebbero funzionare con un microstepping da 1/16
Andando su RepRap Calculator (ma anche sullo stesso Repetier Host), inserendo i dati e facendogli i conti verrebbe fuori che gli DEFAULT_AXIS_STEPS_PER_UNIT per gli assi X e Y dovrebbero essere settati su 80 e invece sulla configurazione Cartesian.h del firmware ho notato che sono impostate su 160, il che inizialmente mi ha fatto pensare che i microstepping fossero impostati a 1/32, però non credo che sia così (leggendo e poco capendo dal post Repetier FW miscrostep
Riporto sotto un'estratto del firmware e attendo vostri numi a riguardo (please, please, please)!!!!
Da Configuration_Cartesian_h:
// MOVEMENT SETTINGS
#define HOMING_FEEDRATE {140*60,140*60,2000,0} // set the homing speeds (mm/min)
// default settings
#define DEFAULT_AXIS_STEPS_PER_UNIT {160,160,6400,1180,1180,1180,1180} // X, Y, Z, E0, E1, E2, E3 default steps per unit
#define DEFAULT_MAX_FEEDRATE {100,100,5,100,100,100,100} // X, Y, Z, E0, E1, E2, E3 (mm/sec)
#define DEFAULT_RETRACTION_MAX_FEEDRATE {100,100,100,100} // E0, E1, E2, E3 (mm/sec)
#define DEFAULT_MAX_ACCELERATION {5000,5000,100,3000,3000,3000,3000} // X, Y, Z, E0, E1, E2, E3 maximum start speed for accelerated moves.
#define DEFAULT_ACCELERATION 2000 // X, Y, Z and E max acceleration in mm/s^2 for printing moves
#define DEFAULT_RETRACT_ACCELERATION 3000 // E max acceleration in mm/s^2 for retracts
#define DEFAULT_TRAVEL_ACCELERATION 4000 // X, Y, Z acceleration in mm/s^2 for travel (non printing) moves
Inoltre da Da Configuration_h:
//=================================== EEPROM ================================
// The microcontroller can store settings in the EEPROM, e.g. max velocity...
// M500 - stores parameters in EEPROM
// M501 - reads parameters from EEPROM (if you need reset them after you changed them temporarily).
// M502 - reverts to the default "factory settings". You still need to store them in EEPROM afterwards if you want to.
//define this to enable EEPROM support
//#define EEPROM_SETTINGS
#define EEPROM_CHITCHAT
// to disable EEPROM Serial responses and decrease program space by ~1700 byte: comment this out:
// please keep turned on if you can.
//#define DISABLE_M503
//===========================================================================
E ancora Da Configuration_adv.h:
// Microstep setting (Only functional when stepper driver microstep pins are connected to MCU.
// Alligator Board support 16 or 32 only value
#define MICROSTEP_MODES {16,16,16,16} // X Y Z E - [1,2,4,8,16,32]
io sto mettendo in moto la mia R2 EVO che è stata ferma per un paio d'anni, per via di qualche componente che non andava ma anche per il poco tempo a mia disposizione dopo l'arrivo di 2 figli.....
Per il momento il problema principale che ho è questo:
Dopo aver scaricato e montato il firmware MarlinKimbraEvo_rev.1 versione 4.1.2 (preso dal sito 3DMakerLab di NicolaP) sulla mia R2 EVO tramite Arduino IDE 1.0.6, dopo aver configurato la stampante su Repetier Host come da indicazioni di NicolaP, andando in modalità manuale per fare i test iniziali, dopo aver mandato tutto in home (X, Y, Z), quando poi sposto gli assi, ad esempio X di 50 mm, noto che in realtà si sposta della metà, quindi di soli 25 mm.
Lo stesso accade per gli assi Y e Z.
Prima di decidermi a scrivere questo post ho cercato di documentarmi/approfondire le mie basilari conoscenze e cercare di risolvere la cosa da me senza dare fastidio nel forum.... non ci sono riuscito....
Partendo dal fatto che ho scaricato il firmware ufficiale di NicolaP e che non l'ho praticamente toccato/manipolato vorrei capire insieme al vostro aiuto perchè mi accade questo e come posso risolvere.
Vi do qualche informazione in più:
Ho controllato i motori e confermo che sono tutti dei passo-passo da 1.8° (tutti Wantai tipo Nema 17 42BYGHW609L20P1-X2 tranne quello dell'asse Y che è da 42BYGHW804(T))
Le cinghie sono delle GT2 con pitch di 2 mm
Le puleggie degli assi X e Y hanno 20 denti
Le barre filettate dell'asse Z sono delle M6 con passo da 1 mm
Gli stepper driver dovrebbero essere dei DRV8825 (ma non ne sono sicuro) e se non ho capito male leggendo qua e là nel forum dovrebbero funzionare con un microstepping da 1/16
Andando su RepRap Calculator (ma anche sullo stesso Repetier Host), inserendo i dati e facendogli i conti verrebbe fuori che gli DEFAULT_AXIS_STEPS_PER_UNIT per gli assi X e Y dovrebbero essere settati su 80 e invece sulla configurazione Cartesian.h del firmware ho notato che sono impostate su 160, il che inizialmente mi ha fatto pensare che i microstepping fossero impostati a 1/32, però non credo che sia così (leggendo e poco capendo dal post Repetier FW miscrostep
Riporto sotto un'estratto del firmware e attendo vostri numi a riguardo (please, please, please)!!!!
Da Configuration_Cartesian_h:
// MOVEMENT SETTINGS
#define HOMING_FEEDRATE {140*60,140*60,2000,0} // set the homing speeds (mm/min)
// default settings
#define DEFAULT_AXIS_STEPS_PER_UNIT {160,160,6400,1180,1180,1180,1180} // X, Y, Z, E0, E1, E2, E3 default steps per unit
#define DEFAULT_MAX_FEEDRATE {100,100,5,100,100,100,100} // X, Y, Z, E0, E1, E2, E3 (mm/sec)
#define DEFAULT_RETRACTION_MAX_FEEDRATE {100,100,100,100} // E0, E1, E2, E3 (mm/sec)
#define DEFAULT_MAX_ACCELERATION {5000,5000,100,3000,3000,3000,3000} // X, Y, Z, E0, E1, E2, E3 maximum start speed for accelerated moves.
#define DEFAULT_ACCELERATION 2000 // X, Y, Z and E max acceleration in mm/s^2 for printing moves
#define DEFAULT_RETRACT_ACCELERATION 3000 // E max acceleration in mm/s^2 for retracts
#define DEFAULT_TRAVEL_ACCELERATION 4000 // X, Y, Z acceleration in mm/s^2 for travel (non printing) moves
Inoltre da Da Configuration_h:
//=================================== EEPROM ================================
// The microcontroller can store settings in the EEPROM, e.g. max velocity...
// M500 - stores parameters in EEPROM
// M501 - reads parameters from EEPROM (if you need reset them after you changed them temporarily).
// M502 - reverts to the default "factory settings". You still need to store them in EEPROM afterwards if you want to.
//define this to enable EEPROM support
//#define EEPROM_SETTINGS
#define EEPROM_CHITCHAT
// to disable EEPROM Serial responses and decrease program space by ~1700 byte: comment this out:
// please keep turned on if you can.
//#define DISABLE_M503
//===========================================================================
E ancora Da Configuration_adv.h:
// Microstep setting (Only functional when stepper driver microstep pins are connected to MCU.
// Alligator Board support 16 or 32 only value
#define MICROSTEP_MODES {16,16,16,16} // X Y Z E - [1,2,4,8,16,32]
|
Re: R2 Evo di NicolaP Thread Ufficiale March 25, 2020 07:56PM |
Registered: 10 years ago Posts: 6,409 |
Gli 8825 sono a 1/32 quindi sono giusti gli step per mm a 160.
La parte riguardante i mircostep è valida solo per schede, come l'alligator ogii anche altre, dove è possibile settarli via software e non con i jumper.
COMPRA ITALIANO - sostieni le nostre aziende - sostieni la nostra gente - sostieni il tuo popolo - sosterrai te stesso.
Alberto C. felice possessore di una Kossel K2
My Blog - My Thingiverse
La parte riguardante i mircostep è valida solo per schede, come l'alligator ogii anche altre, dove è possibile settarli via software e non con i jumper.
COMPRA ITALIANO - sostieni le nostre aziende - sostieni la nostra gente - sostieni il tuo popolo - sosterrai te stesso.
Alberto C. felice possessore di una Kossel K2
My Blog - My Thingiverse
|
Re: R2 Evo di NicolaP Thread Ufficiale March 26, 2020 05:44AM |
Registered: 4 years ago Posts: 9 |
Quote
MagoKimbra
Gli 8825 sono a 1/32 quindi sono giusti gli step per mm a 160.
La parte riguardante i mircostep è valida solo per schede, come l'alligator ogii anche altre, dove è possibile settarli via software e non con i jumper.
Mago, intanto grazie tante per la tua risposta.
Come avrai intuito io non ho conoscenze specialistiche in merito; sfogliando la scheda tecnica dei DRV8825 avevo trovato una tabella (che allego) dove agendo su dei pin si possono configurare diversi step mode dei motori, da 1 fino a 1/32; leggendo il tuo post, mi pare di capire che con alcune schede tipo la Alligator, gli step mode si posso settare via software e visto che non scrivi altro mi pare di capire che con Arduino Mega 2560 + Ramps 1.4, questo non si possa fare ne via software ne via hardware (tramite jumper).
Sperando quindi di aver capito il tuo messaggio, secondo te perchè ho gli assi che si muovono della metà?
Dove posso agire per cercare di sistemare?
Sul firmware o sull'hardware?
Grazie in anticipo,
Vito
|
Re: R2 Evo di NicolaP Thread Ufficiale March 26, 2020 10:41AM |
Registered: 9 years ago Posts: 144 |
|
Re: R2 Evo di NicolaP Thread Ufficiale March 26, 2020 02:39PM |
Registered: 4 years ago Posts: 9 |
Quote
c11610o
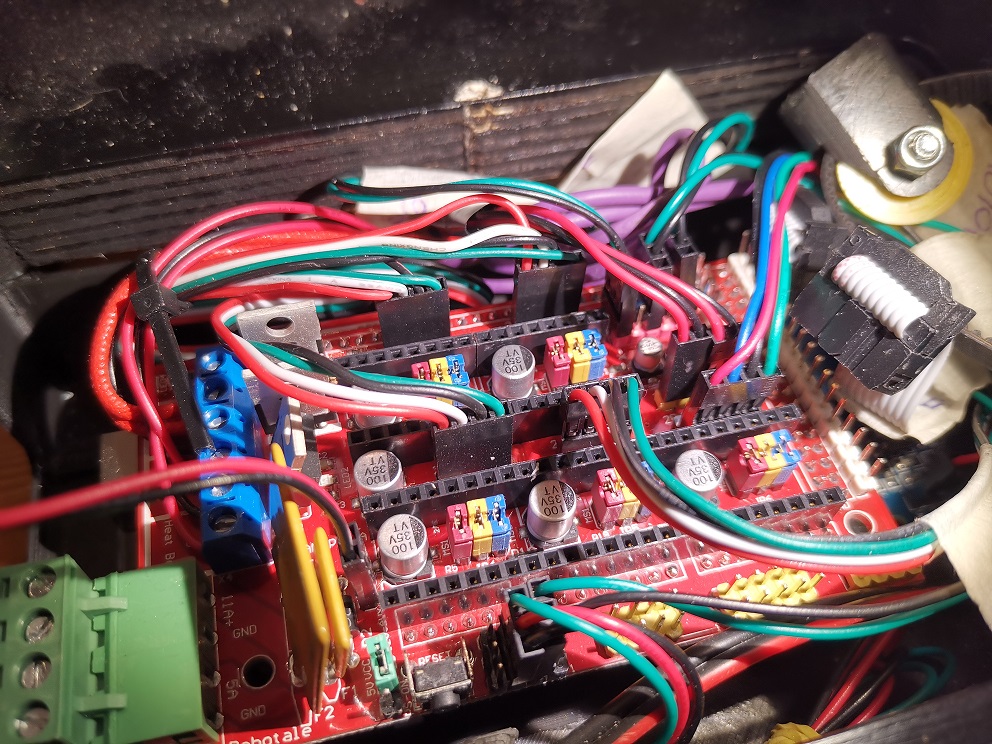
I jumper sono sulla ramps, sotto ai driver (3 sotto ogni driver), toglili e verifica che siano tutti inseriti[/quote
Grazie per la dritta.
Dopo il post del Mago, mi ero scaricato la scheda tecnica della RAMPS 1.4 e ho visto che per essere sicuro che i driver DRV8825 andassero ad 1/32 ci dovevano essere tutti e tre i pin inseriti nella RAMPS.
Così mi sono messo di pazienza, li ho rimossi tutti (come puoi vedere dalla foto) e in effetti c'erano tutti e tre su tutte e 5 le posizioni (X,Y,Z,E1, E2).
Ho smontato anche le pulegge e ho contato i denti e confermo che sono a 20 denti, così come le cinghie che sono delle GT2.
Ho tensionato le cinghie più o meno, ma lo scostamento è rilevante e comunque non è esattamente la metà e dipende dal tipo di asse.
Ho fatto delle prove da Repetier e succede questo:
- Comando di spostamento asse X di 50 mm → il carrello in realtà si sposta di circa 33 mm (con scostamenti di ± 3 mm)
- Comando di spostamento asse Y di 50 mm → il carrello in realtà si sposta di circa 20 mm (con scostamenti di ± 2 mm)
- Comando di spostamento asse Z di 50 mm → il carrello in realtà si sposta di circa 30 mm (con scostamenti di ± 2 mm)
Il movimento dei tre carrelli a mio avviso non è fluido, va un pò a scatti.
La meccanica l'ho controllata un bel pò ed il montaggio secondo me è fatto correttamente.
E poi avrei dovuto essere proprio sfigato o imbranato a cannare tutti e 3 gli assi.... (ma non lo escludo)....
A questo punto, seppure le mie conoscenze elettriche/elettroniche siano scarse, in questo momento ipotizzo che si possa trattare di una caduta di tensione verso i motori passo passo; i cavi che aveva mi aveva fornito NicolaP non erano lunghi a sufficienza e lui in effetti dice di saldarne 2 per raggiungere la lunghezza desiderata.....
Io questa cosa in effetti non l'ho fatta e ho invece collegato i fili a mezzo PIN, tipo l'attacco che lui suggerisce per il collegamento del piatto riscaldante, perchè avrei voluto staccarli all'occorrenza tipo se si fosse bruciato un motore.
Col senno di oggi, forse ho fatto una cazzata?
Ditemelo voi!
In tal caso, stacco ad esempio il cavo dal motore e controllo l'amperaggio della corrente?
Se sì, i teminali del tester con si quali coppie di fili li devo provare? Rosso con Bianco e poi Nero con Verde?
E se l'amperaggio non è sufficiente posso aumentarla dai driver DRV8825 girando la vitina oppure devo saldare i cavetti come suggerisce Nicola P?
Grazie ancora,
|
Re: R2 Evo di NicolaP Thread Ufficiale March 27, 2020 05:01AM |
Registered: 9 years ago Posts: 144 |
|
Re: R2 Evo di NicolaP Thread Ufficiale March 27, 2020 05:14AM |
Registered: 10 years ago Posts: 6,409 |
Ma il firmware che stai mettendo è la versione 4.1.2? giusto?
COMPRA ITALIANO - sostieni le nostre aziende - sostieni la nostra gente - sostieni il tuo popolo - sosterrai te stesso.
Alberto C. felice possessore di una Kossel K2
My Blog - My Thingiverse
COMPRA ITALIANO - sostieni le nostre aziende - sostieni la nostra gente - sostieni il tuo popolo - sosterrai te stesso.
Alberto C. felice possessore di una Kossel K2
My Blog - My Thingiverse
|
Re: R2 Evo di NicolaP Thread Ufficiale March 27, 2020 08:05AM |
Registered: 4 years ago Posts: 9 |
Quote
c11610o
OK, i collegamenti dovrebbero essere giusti. Probabilmente hai perdita di passi, quindi la prima cosa che devi fare è verificare la VREF dei driver. Cerca "vref drv8825" su google, troverai sicuramente come fare
Proprio ieri sera ho smanettato sul forum e sul web e ho visto che la Vref era uno dei parametri da controllare ed eventualmente settare correttamente.
Stamattina l'ho controllata sui driver (DRV8825) della mia scheda e la Vref misurata è perfettamente tarati a 0,75V su tutti e 5 i driver presenti; il valore Vref=0,75V a mio parere è corretto, nel senso che non credo sia la ragione del mio male, infatti i miei motori hanno un assorbimento di 1,7A/fase → facendoli lavorare all'80% (come suggerisce ivan bortolin Regolare i driver Pololu) e applicando (in maniera inversa) la formula che ho trovato sul sito della Pololu (DRV 8825 datasheet) → Current Limit = VREF × 2 → (1,7 * 0,8) / 2 ~ 0,7 V e se consideriamo che potrebbero esserci delle piccole perdite di carico durante il percorso il valore Vref=0,75V diciamo che dovrebbe andare più che bene.
Quote
MagoKimbra
Ma il firmware che stai mettendo è la versione 4.1.2? giusto?
Mago ti confermo che la versione che ho installato la versione 4.1.2 (Firmware R2 EVO: Marlinkimbra 4.1.2 Rev1 scaricata direttamente dalla dropbox di 3D Maker Lab di NicolaP).
Penso lui ci abbia lavorato su e poi avevo anche letto su qualche pagina di dibattito sul forum che NicolaP non ritenesse di dover testare/passare ad una versione di MK superiore in quanto la versione 4.1.2 avrebbe funzionato più che egregiamente.
|
Re: R2 Evo di NicolaP Thread Ufficiale March 27, 2020 10:46AM |
Registered: 4 years ago Posts: 9 |
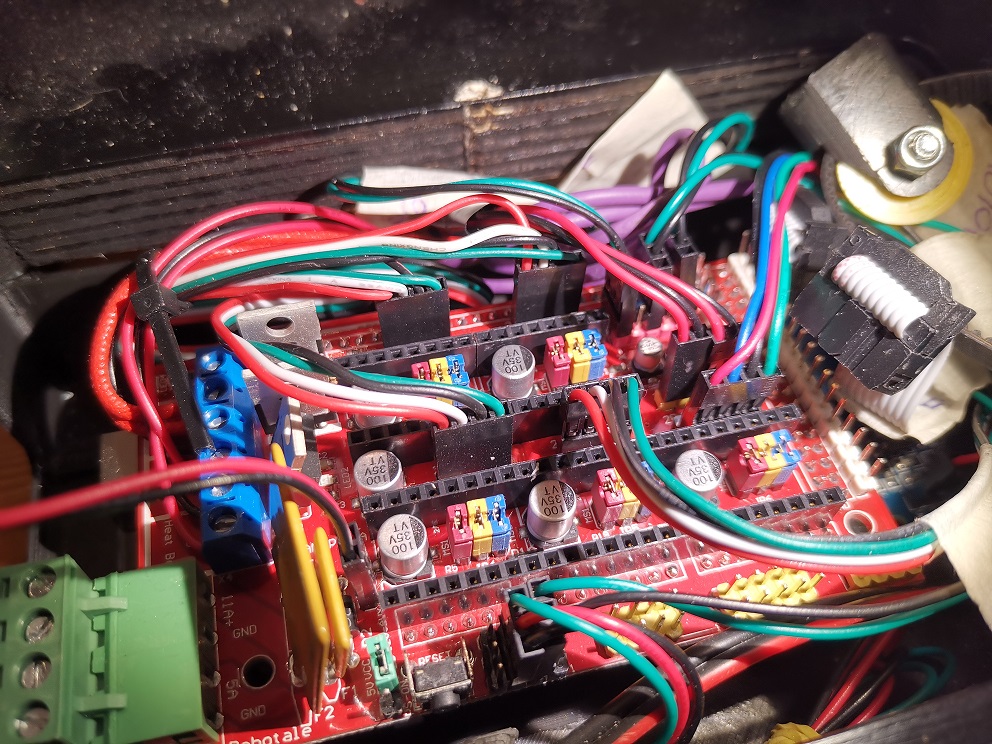
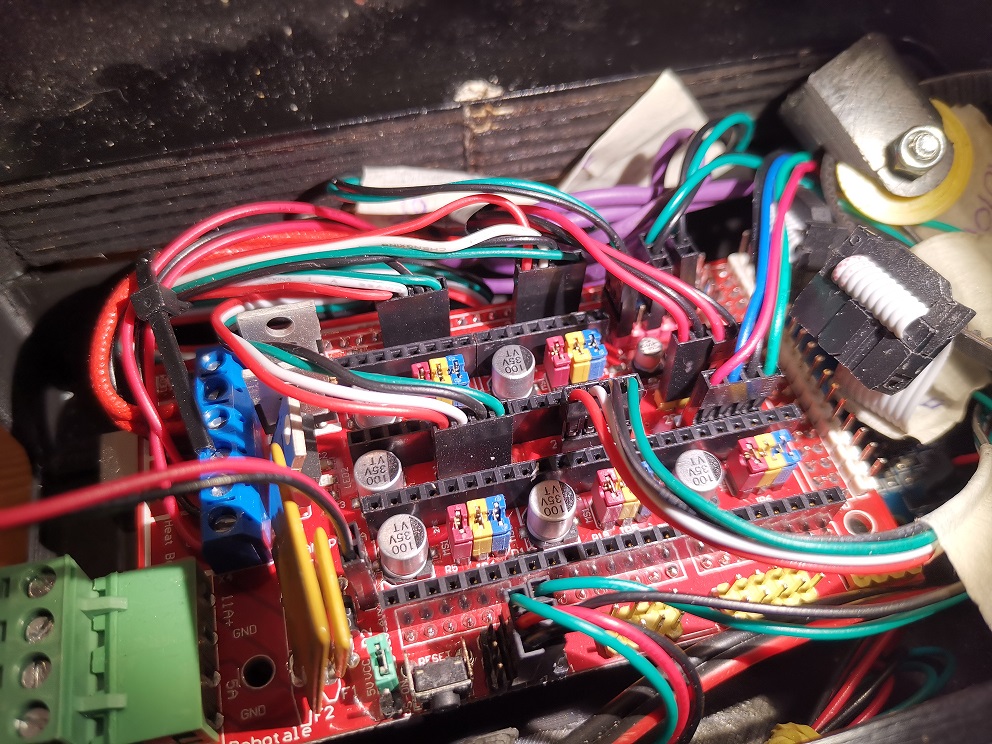
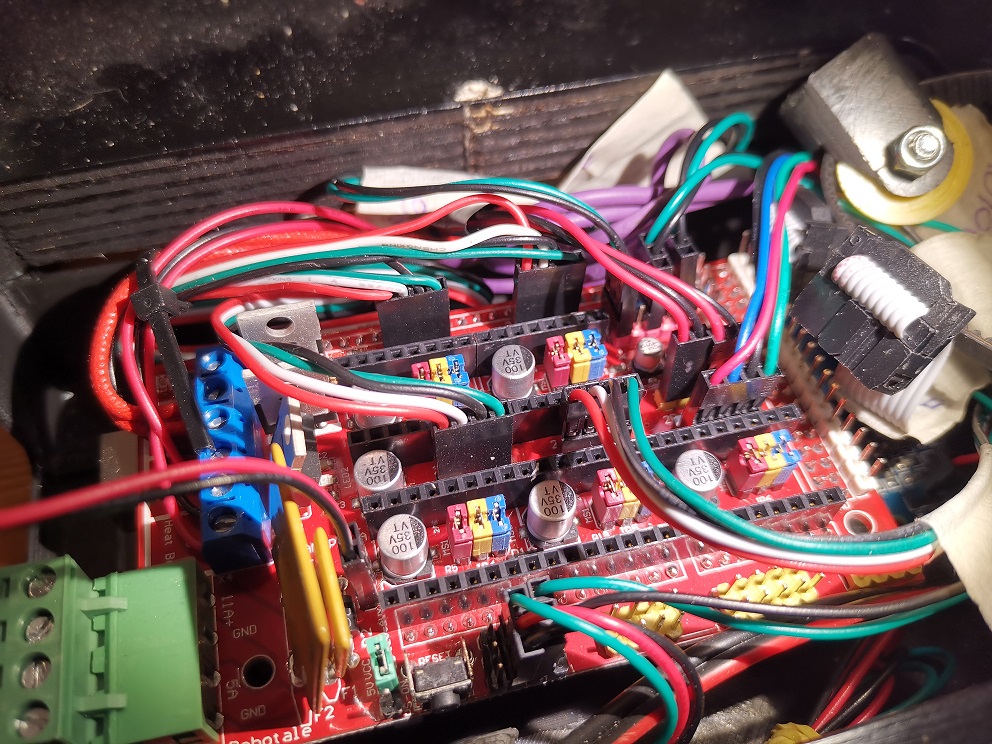
In merito al mio problema volevo chiedere il vostro parere su una incongruenza che ho trovato sul manuale di cablaggio della R2 EVO di NicolaP. 
Vi allego un PDF esemplificativo.
In buona sostanza nello schema generale la sequenza dei cavi che alimentano i motori è diversa dalla sequenza che NicolaP dice di fare subito dopo....
Io ho cablato come da schema generale quindi 1) Rosso-Blu-Nero-Verde (vedi foto scheda*)
Che sia questo il mio problema?
Se sì, la corretta sequenza è quindi 2) Rosso-Blu-Verde-Nero.....
La 1) o la 2)???
* vi ho allegato nuovamente la foto della scheda senza i driver che avevo rimosso per controllare i jumper perchè la sequenza dei cavi nei Dupont era più chiara.
Vi allego un PDF esemplificativo.
In buona sostanza nello schema generale la sequenza dei cavi che alimentano i motori è diversa dalla sequenza che NicolaP dice di fare subito dopo....
Io ho cablato come da schema generale quindi 1) Rosso-Blu-Nero-Verde (vedi foto scheda*)
Che sia questo il mio problema?
Se sì, la corretta sequenza è quindi 2) Rosso-Blu-Verde-Nero.....
La 1) o la 2)???
* vi ho allegato nuovamente la foto della scheda senza i driver che avevo rimosso per controllare i jumper perchè la sequenza dei cavi nei Dupont era più chiara.
|
Re: R2 Evo di NicolaP Thread Ufficiale March 27, 2020 02:22PM |
Registered: 9 years ago Posts: 3,268 |
se hai il nome del motore puoi guardare nei datasheet oppure usare il tester per vedere le coppie di fili giuste:
[reprap.org]
poi li metti 1a 1b e 2a 2b, se il motore poi gira al contrario e non vuoi mettere mano al firmware basta che scambi le coppie.
Ma se avessi sbagliato collegamento i motori non si muoverebbero affatto.
Edited 2 time(s). Last edit at 03/27/2020 02:25PM by bilanciamist.
Alessandro
Prusa I3 Rework molto modificata - Taurino Classic - Ramps 1.4 - Driver DVR8825 - Titan Extruder e Hotend E3D V6 - Bltouch originale - Firmware MarlinKimbra - Cura - Repetier Host
[reprap.org]
poi li metti 1a 1b e 2a 2b, se il motore poi gira al contrario e non vuoi mettere mano al firmware basta che scambi le coppie.
Ma se avessi sbagliato collegamento i motori non si muoverebbero affatto.
Edited 2 time(s). Last edit at 03/27/2020 02:25PM by bilanciamist.
Alessandro
Prusa I3 Rework molto modificata - Taurino Classic - Ramps 1.4 - Driver DVR8825 - Titan Extruder e Hotend E3D V6 - Bltouch originale - Firmware MarlinKimbra - Cura - Repetier Host
|
Re: R2 Evo di NicolaP Thread Ufficiale March 27, 2020 04:14PM |
Registered: 4 years ago Posts: 9 |
Quote
bilanciamist
se hai il nome del motore puoi guardare nei datasheet oppure usare il tester per vedere le coppie di fili giuste:
[reprap.org]
poi li metti 1a 1b e 2a 2b, se il motore poi gira al contrario e non vuoi mettere mano al firmware basta che scambi le coppie.
Ma se avessi sbagliato collegamento i motori non si muoverebbero affatto.
Le coppie di fili le ho controllate con il tester, una per una e sono corrette in termini di coppie (ed in effetti poi i motori si muovono).
Il mio dubbio è: le coppie di fili devono essere alimentate con una certa logica per far funzionare correttamente i motori?
Ovvio direte, ma io da profano intendo dire: assumendo che il positivo (alimentato) è 1a e il negativo 1b, il corretto accoppiamento/funzionamento dovrebbe avvenire con 2a positivo e 2b negativo.
E se è giusto così, cosa accadrebbe invece se 2a è negativo e 2b è (alimentato) positivo? Il motore non si muove oppure si muove alla membro di segugio come accade ai miei?
|
Re: R2 Evo di NicolaP Thread Ufficiale March 28, 2020 04:36AM |
Registered: 9 years ago Posts: 3,268 |
preso da un vecchio post:
quindi, se fai l'operazione che intendi, cioè invertire i due cavi di una coppia, ottieni che il motore giri nel verso opposto.
Se ottenessi sempre lo stesso spostamento, allora avresti un problema di definizione dei passi, perchè calcolato un valore sbagliato o per un valore sbagliato nel firmware.
Dato che non è così, allora probabilmente è un problema di perdita di passi. Fai delle prove, scollega uno dei motori dalla stampante (in modo che non abbia carico), fallo muovere da repetier o da lcd e vedi se gira bene, se si impunta, se è facile frenarlo con le mani... puoi anche calcolare quanti giri dovrebbe fare per fare il movimento che gli hai chiesto di fare e vedere se li fa tutti.
Se da solo si muove bene, ma si frena facilmente allora potrebbe essere un problema di vref, potresti provare a aumentarla leggermente, oppure passare a 16 microstep, almeno per il momento. Se l'asse z ha due motori e un solo driver, la vref deve essere maggiore (inizia da 1,5 volte la normale).
Alessandro
Prusa I3 Rework molto modificata - Taurino Classic - Ramps 1.4 - Driver DVR8825 - Titan Extruder e Hotend E3D V6 - Bltouch originale - Firmware MarlinKimbra - Cura - Repetier Host
Quote
dyreprap.com
i motori stepper internamente hanno due avvolgimenti (bobine) separati fra loro.
con un comune tester puoi verificare le coppie di colori dello stesso avvolgimento. A+ A- e B+ B- il valore di resistenza e' molto basso.
Invertendo i fili A+ e A- oppure B+ e B- il motore gira al contrario.
quindi, se fai l'operazione che intendi, cioè invertire i due cavi di una coppia, ottieni che il motore giri nel verso opposto.
Se ottenessi sempre lo stesso spostamento, allora avresti un problema di definizione dei passi, perchè calcolato un valore sbagliato o per un valore sbagliato nel firmware.
Dato che non è così, allora probabilmente è un problema di perdita di passi. Fai delle prove, scollega uno dei motori dalla stampante (in modo che non abbia carico), fallo muovere da repetier o da lcd e vedi se gira bene, se si impunta, se è facile frenarlo con le mani... puoi anche calcolare quanti giri dovrebbe fare per fare il movimento che gli hai chiesto di fare e vedere se li fa tutti.
Se da solo si muove bene, ma si frena facilmente allora potrebbe essere un problema di vref, potresti provare a aumentarla leggermente, oppure passare a 16 microstep, almeno per il momento. Se l'asse z ha due motori e un solo driver, la vref deve essere maggiore (inizia da 1,5 volte la normale).
Alessandro
Prusa I3 Rework molto modificata - Taurino Classic - Ramps 1.4 - Driver DVR8825 - Titan Extruder e Hotend E3D V6 - Bltouch originale - Firmware MarlinKimbra - Cura - Repetier Host



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Sorry, only registered users may post in this forum.