Hi,
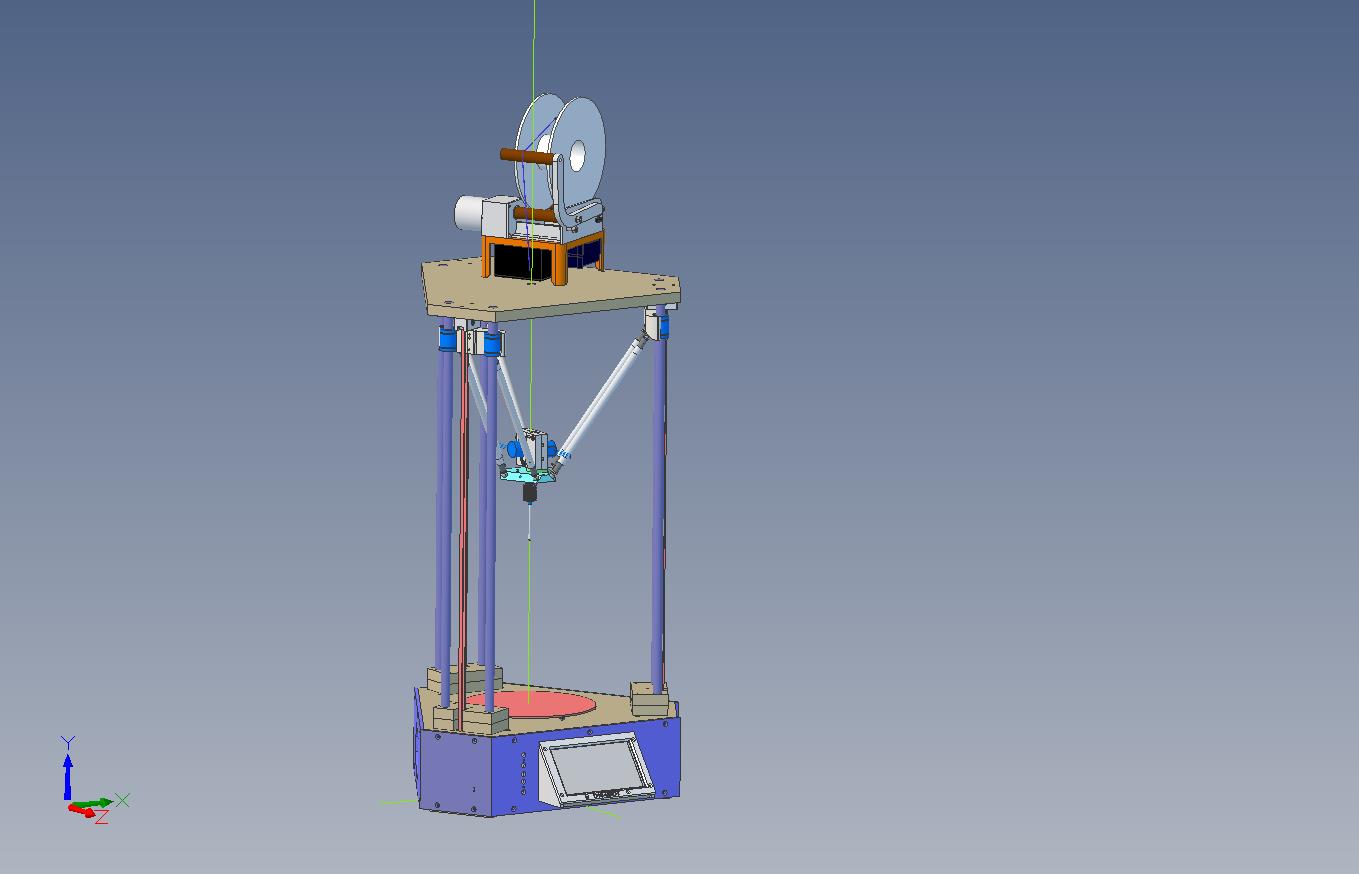
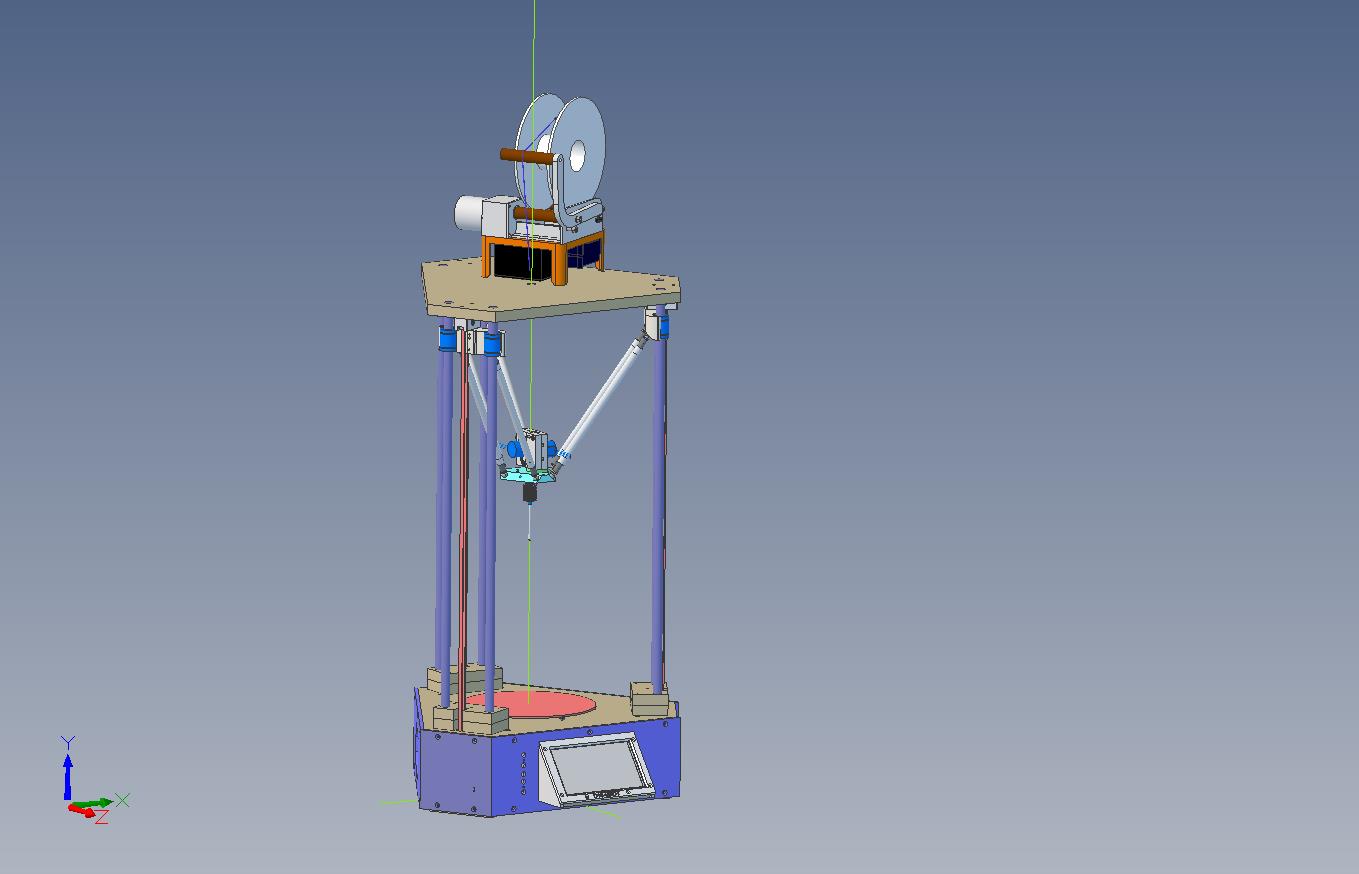
As from 2014 I started to develop and build my own 3D Delta printer. At this moment my little guy is doing exactly where he was build for, printing nice objects and it let me test all kind of new things I like to develop. See picture
I named the printer D16_Ebot. see attachment as a picture and the 3D pdf file. (Double click in the picture and you will be enabled to lookup the printer from all directions as well as with the help of the parts list tree, hiding and un-hiding parts and sub assy's.)
The D16_Ebot has a heated bed of 230 mm whereof 200 mm in use; the print height is 230 mm but is in fact only limited by the length of the used poles.
For the electronics I have used a BeagleBone Black rev.C and a controller board BeBoPr++
Because I was used to LinuxCNC that is around for many years with a huge user group, I did use also this time LinuxCNC (Machinekit)
If I will build again one, and I will, I will use a smoothieboard.
The maximum speed for still decent prints is 80mm/sec but a more realistic speed for 1.75mm filament is 50 - 60 mm/sec
The poles are "Silver-steel D=16mm"
The base and the top is 18mm MDF
The effector and vertical slider blocks are Nylon
The 6 aluminum parallel arms have a diameter of 12 and are 296 long center to center with 10mm balls
A pull spring keeps all together in the D=10mm joints like your own elbows are hold together.
Magnets will do the job too but at a crash with your hot end all arms will fly around. A magnet will loose all forces after 1 mm detach, a pull spring does increase his force, trying to keep all in place, again like your own elbow.
Talk to you later where I will go in detail and will post all basic drawings.
Have a good one
Edited 2 time(s). Last edit at 02/27/2016 02:46PM by evandene.
Attachments:
open |
download -
D16_EBOT_BELT_REV00_assy.jpg
(48.7 KB)
open |
download -
D16_EBOT_BELT_REV00.pdf
(1.67 MB)
{kind=link}
{kind=link}