TRap workbook 2010 September
2010 September 01
- Registered team on the RepRap wiki
- Started concept generation
2010 September 02
- Created this wiki page; thanks again to Team Columbus, who provided the format.
2010 September 03
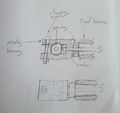
- Finished mocking up Concept 1.

This is worth taking some time to explain. TRap is a manipulator with a parallel kinematic chain. I am using a variation on the normal Delta robot design that is most often seen in "Pick-and-place" robots. This design approach has two major advantages: it can be very fast, as the arms manipulator platform has a very low intertia (servos are all stationary); and all three axes are totally identical, reducing part count. The major disadvantage is that the control problem is not trivial: getting the end effector to move with constant velocity along a straight line involves all three servos.
The major parts of this design are:
- Base Plate: This is easily the largest part, and will have to be split into several different (preferably identical) parts to be printable. In this concept, the build surface is not part of the baseplate, but can be places on top or, or underneath the base plate. This will probably change as the design is fleshed out more.
- Motorized axes: These are shown much simplified (no motor), and the details still need to be worked out. The gist of it is that they will pivot around their attachment to the base plate, and they will act to move one vertex of a tetrahedron.
- Tetrahedra: This is merely a force redirecting structure. It allows me to have much less structure than some other tripod designs. Three are required.
- Arms: A length of printed plastic with a universal joint at each end. Six are required.
- Platform: This is where the extruder will live. One required.
Note: The blue lines on the sketch show the desired working envelope. As yet, things still need to be scaled a bit to avoid mechanical singularities.
2010 September 04
- Uploaded Pyramidal Pendulum Manipulator concept sketch
- Uploaded Universal joint concept sketch
- Uploaded Axis concept sketch
- Created Concept section on main page

TRap Concept 2: Pyramidal Pendulum Manipulator.

TRap Concept 3: Prismatic Axis.
TRap Concept 3: Reprap-able Universal Joint for Delta-Style Manipulator.


