Azteeg X3
Release status: working

| Description | Full featured 3D Printer Controller
|
| License | CC SA 3.0
|
| Author | |
| Contributors | |
| Based-on | |
| Categories | |
| CAD Models | |
| External Link |
Contents
Where to get it
They are often on back order, but an expected shipping date is usually posted.
Azteeg X3 at the Panucatt Store: http://www.panucatt.com/Azteeg_X3_reprap_3d_printer_controller_p/ax33dp.htm
Introduction
The Azteeg X3 is a full featured, easy to use 3D printer Electronics powered by the reliable and powerful Atmel ATMEGA2560 micro controller.The X3 is designed with excellent high current capability to run most 3D printer configurations including those with dual extruders and large, power hungry heated beds.. Will work with Prusa Mendel, Mendel Max, Ordbot, Printrbot, RostockMax and most 3D printers.
We've combined the RAMPS and the Arduino Mega into one sleek package, added lots of cool stuff, beefed up power handling and made the Azteeg X3 pin to pin compatible with the popular RAMPS controller. This means you can use it right out of the box. Compatible with all mainstream reprap 3D printer firmwares including SPRINTER, MARLIN, REPETIER and others.
The X3 has a removable top shield to physically protect its parts which also doubles as an expansion board (12-24v Boost power supply for example). Printing via micro SD card is now easier with the built-in microSD slot and also has built in buzzer.
Features
- Atmel ATmega 2560 with FT231x FTDI USB chip
- Compatible with Sprinter, Marlin, Repetier, others.
- 5 Pololu style stepper driver slots.
- Mosfet control for 2 extruders and 1 hotbed
- 4 low power PWM Mosfet driven outputs for LEDs and Fans
- 6 end stops and 3 thermistor inputs
- Wide input high efficiency switching Power supply (5v @ 500ma max)
- microSD card socket built-in with card detect and activity LED
- On board buzzer
- Fused and Zener protected +5v Vcc line.
- Ultra Low RDSon, High power Mosfets for minimal heat buildup
- Input power selector for micro controller [USB or internal regulator]
- Secondary power input for stepper motors.
- High current capacity connectors and PCB traces.
- Made with 2 oz. copper and RoHS compliant
- Shield to protect electronics and act as expansion board
- i2C, +5, GND, SPI and Analog/Digital pins on the expansion ports
- Fast acting blade fuse
- Screw terminal or crimp type connector options
- Lots of LEDs, Rx/TX serial, PWR, hot end and hot bed.
- Compact and sleek package. 4.35" x 2.85" Board size
- Optional 12 to 24 volt 3 Amp boost power shield
Images
Product Photos

X3 prototype

X3 prototype

X3 prototype w/ power pack

X3 prototype cover removed

12-24v boost prototype

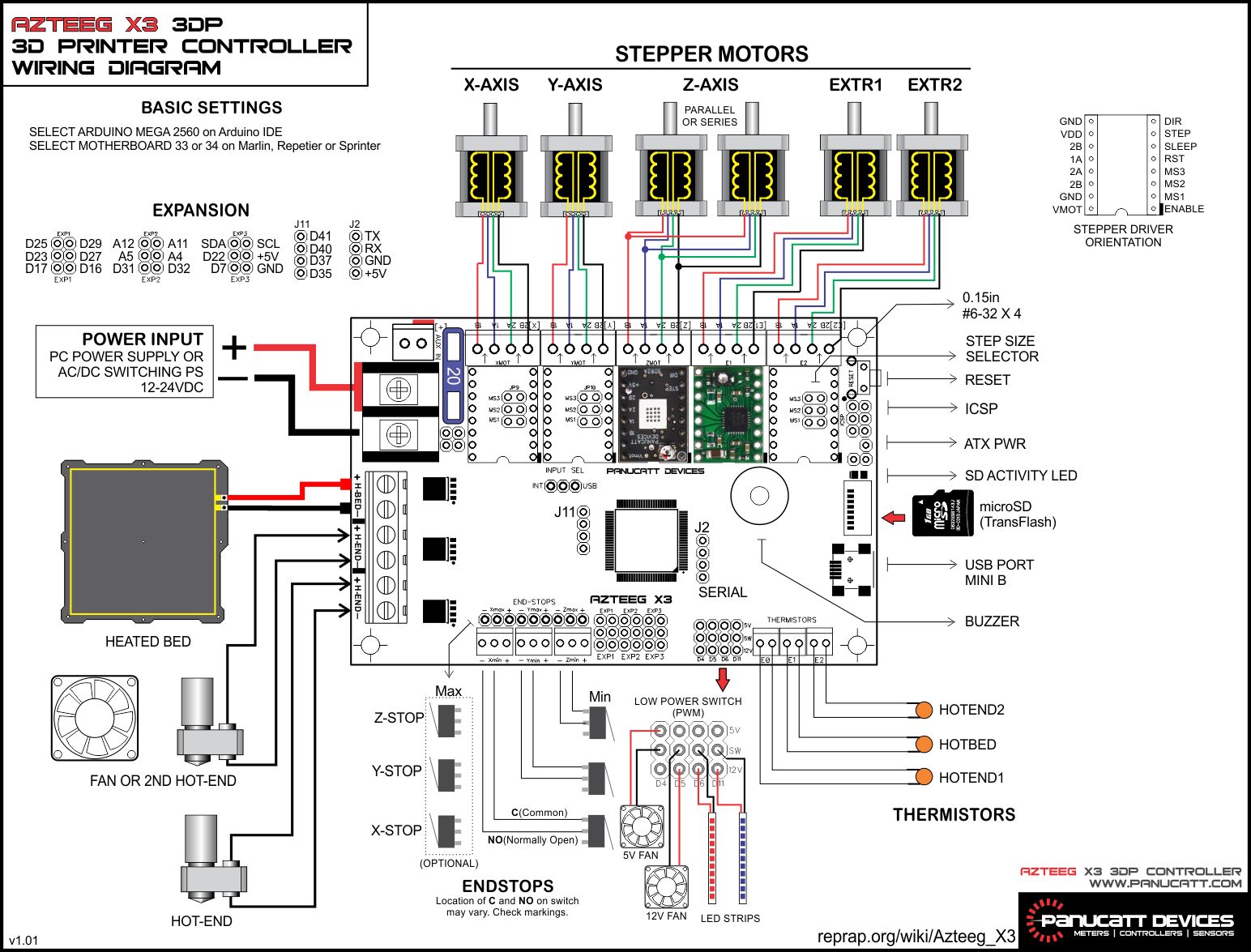
Wiring Diagram






User Installations

Running a Hadron Ordbot(mhensen)

<videoflash type="youtube">-mq8qUMBhyw|480|360</videoflash>
Files and Documentation
Get your Azteeg X3 up and running
Recommended hardware and electrical components for the Azteeg X3
This is a recommendation only, your setup may need something totally different. Adjust accordingly.
- Power supply: 12v 20amp switching "brick" Power supply or 500W PC power supply. 24v power supplies can also be used.
- USB Cable: 3ft or 6ft Mini-USB preferably with ferrite bead.
- Micro-SD: 2GB and below seems to work better but higher capacities has been tested ok. Not all cards will work.
- Main fuse: 20Amps ATC Fuse. Available at most electronics and automotive parts supply store.
- Wire Size: 10-14 AWG for Main Power supply, 12-16 AWG for Heated bed (keep it short), 16-20 for Hotends, 22-24 AWG for motors, 24-26 AWG for Endstops and thermistors.
Skip to the Power up section if you want to install software without wiring up the board.
Hardware
Tools required: Soldering Iron, Solder, Phillips Screw Driver.
1. Solder Connectors - Check that all your connectors are accounted and solder them one at a time. Ensure that you have a good solder joint and align each connector to make it look nice. One trick is to place the connector and solder just one pin to hold it in position, after soldering the rest of the connectors you will see if everything aligns well. Reheat the solder joint to re-position the connector, if all is good solder the rest of the pins.
2. Install micro stepping jumpers - These jumpers determine the micro stepping setting for your stepper drivers. These are labeled MS1, MS2 and MS3 on the board( see wiring diagram). Please check your drivers argumentation for specific settings. On most pololu style drivers ( stepsticks, SureStepr and pololu A4988) having all jumpers populated will give you 1/32 stepping. NOTE: Many people will tell you not to beyond 1/16.
3. Solder other connectors - If you are using other connections like the expansion pins, now is the time to solder them. Take the same precautions as mentioned above and check each solder point to make sure it has a good bond to the pins.
4. Visual check - Before wiring your board, do a quick visual check to make sure that there are no solder shorts, jumpers are pushed all the way down and nothing looks out of the ordinary.
5. Wire up your board - Open up the wiring diagram and pick a suitable location for your controller on your printer. Start wiring your board and please observe polarities and pin designations for endstops and thermistor connections.
{kind=link}
Endstops
The endstops need to be connected to the Common(C) and Normally Open(NO) pins of the switch. Please check the markings on your endstop switches as they may vary from model to model. If you have these mis-wired your motors will not move or will move only in one direction.
Thermistors
The thermistors sometimes come with insulators on the leads which is nice but others have bare leads, care should be taken that these dont short or come in contact with the heated bed traces or the body of your hot end. It could could render that particular controller pin inoperable or worse could kill the micro controller.
Motors
Wiring the motors can be a little bit tricky but not difficult. 1A and 1B is a pair and 2A and 2B is another, mis-wiring them could result in stutters or non-movement. A nice trick to find the wire pairing of your motor (if not shown on your manual) is to short 2 random wires on your motor and spin the shaft with your fingers. If its easy to spin you don't have a pair, if it feels as if its fighting the spin you have a pair. You may still need to flip some wires later to get your motors work perfectly.
Input power
The Input power is a polarized. Ensure that you connect the + and GND of your power supply correctly to the board, having it reversed may damage your X3 and other peripherals connected to it. Wire up your power supply using the recommended wire size above to the input connector. It is advisable to use wire terminal connectors but stripped wire can be directly inserted on the black barrier block.
Power up
| |
Caution Incorrect wiring or mis-orienting the stepper drivers can destroy your board and cause a fire hazard
|
Tools required: Power supply, USB cable, Wires.
There are two ways of powering up your controller, first is using your power input connector (12-24v) and second is getting power through USB. While using USB will only power the micro controller, it is useful when you just want to load firmware without running your motors or other peripherals. Normally, the controller board should be powered using the power input connector.
Power up using USB Remove the top cover gently and locate the "input Select" jumper on the middle of the board. Place the shorting jumper to the right which is labeled as USB(default location is on the left). Replace the cover and make sure it is well seated on the controller. Connect your USB cable from your PC to the mini-USB connector on the right edge of your board, you should see blue power light come on under the top cover. Your PC(windows) should start detecting a new device if your board has been successfully powered up. Proceed to the SOFTWARE section to install drivers and software to run your controller. If you get and error on your PC or don't see any activity of detection, proceed on the troubleshooting section.
Power up using Power supply By Default the "Input Select" Jumper is set to be powered from the Input Connector so no need to change this setting. Double check that polarity is correct before powering up. If you have stepper drivers installed make sure they are oriented correctly and you have your motors wired up. Upon power up your blue LEDs will turn on under the top cover, if you have your USB cable connected you should see your PC (Windows)detecting the new hardware. Proceed to the SOFTWARE section to install drivers and software to run your controller.If you get and error on your PC or don't see any activity of detection, proceed on the troubleshooting section.
Software
This section will show you how to get firmware into your controller and run it with basic settings.
Software required: FTDI USB VCP drivers, Arduino IDE v0023, Choice of firmware ( Marlin or Repetier or Sprinter ), Pronterface
1. USB VCP Drivers - The Azteeg X3 uses the newer FT231x USB to UART chip and it needs the updated VCP(virtual com port) drivers from the
manufacturer's website as linked above. Download the correct version for your operating system or you can get the executable version for Windows(easier).
Windows Vista/7 may try to do an update to locate the proper drivers but it is recommended to install the FTDI drivers for better performance.
The VCP drivers will install a COM Port on your computer for the Azteeg X3, you can check what port number was assigned by going to your device manager and
click on Ports(COM & LPT) look for something that says "USB Serial Port(COM3)" where COM3 is you assigned port number(will vary from PC to PC). Remember
this number as you will be using it later in configuring other software.
2. Install Arduino IDE - Download and extract the Arduino IDE from the link above (You want the 0023 version if the IDE).
3. Get your firmware - While you can use most firmwares out there, we will use Marlin as an example. Download and extract Marlin from the link above
or any other forks of the firmware that you prefer/need.
4. Upload firmware - Run the Arduino IDE (arduino.exe).
Select your board - Click on Tools -->Board -->Arduino Mega 2560,
Select your serial port - Click on Tools-->Serial Port-->(select your COM port for the X3 USB, you can check this in Device manager)
On Arduino click File-->Open -- then point to your Marlin Download and select Marlin.pde. With Marlin loaded on the IDE window, click on the tab that says "configuration.h". These are the basic entries that you need to change to get the X3 working.
- #define BAUDRATE 250000 //Default. This will work fine for the X3
- #define MOTHERBOARD BOARD_AZTEEG_X3 //This will select board 67 per boards.h
- #define TEMP_SENSOR_0 6 //Hot end thermistor. If you have the 100K Epcos included in the bundle "6" is the correct entry or see list. Confirm with your products instructions.
- #define TEMP_SENSOR_1 0
- #define TEMP_SENSOR_2 0
- #define TEMP_SENSOR_BED 6 //Heated bed thermistor. If you have the 100K Epcos included in the bundle "6" is the correct entry or see list. Confirm with your products instructions.
These entries are the only ones you need just to get the X3 running. Once you get it to upload you can now test most features of the board. You will need to tweak the settings on the configuration file for your printer.
5. Upload(or compile to test) Marlin - While still on the Arduino window
Click on the Triangle inside the circle to do a test compile, this makes sure that the firmware does not contain errors( you can skip this)
Click on the arrow pointing to the right inside a square frame to upload firmware to the board. If everything goes well you'll see a "Done Uploading" message near the bottom of the Arduino window.
6. Download and install Host software - You can either use Pronterface(printrun) or repetier host for this. We will use pronterface as an example. Download from the link above.
Please go through the read me on how to install as it does have a couple of dependencies. After installing everything, run pronterface and try connecting to your X3. On the pronterface window, click and select your COM port for X3 and next to it is the baud rate you set on the Marlin Configuration.h page (250000). Click connect to establish communication with your board, if everything goes well you will see a message saying "Printer Online" on the lower left of the window. You may also see errors if you have not correctly configured the thermistors or endstops. At this point you can now go back and configure Marlin again to fine tune and calibrate you printer. You also need to install the drivers and Mosfet connections.
Advance Configuration
Extra Pins
The following pins can be used to access some of the additional features. They are defined automatically when using Repetier-Firmware motherboard 34.
In Marlin, add the following to the pins.h
Scroll down to "if (IS_RAMPS && !MB(RAMPS_OLD)) || MB(3DRAG) || MB(AZTEEG_X3) || MB(AZTEEG_X3_PRO)"
Add these after the "else" (not in the 3DRAG)
- FAN_PIN 5 \\If using D4 for the 5V fan, use 4 here.
- LIGHT_PIN 6
- BEEPER_PIN 33
- BEEPER_TYPE 1
Troubleshooting
An sdfatlib error may occur when compiling the Repetier Firmware with Motherboard 34 on Linux. You can work around this by either using Firmware 33 or by editing the pins.h file around Line 419 to set SDSUPPORT to false. If a solution that allows the use of the SDSUPPORT can be found, please post.
Details: http://forums.reprap.org/read.php?146,240902,240902
Wiring Diagram V1.1 Errata
Pg. 2 - Top Cover On the wiring diagram for pins D16 and D17 on the expansion board they are listed as 16 on top and 17 on bottom. This is actually inverted. You can test these with G-Code. M42 P17 S255 will turn pin 17 on and M42 P17 S0 will turn it off.