Wallace
|
English • العربية • български • català • čeština • Deutsch • Ελληνικά • español • فارسی • français • hrvatski • magyar • italiano • română • 日本語 • 한국어 • lietuvių • Nederlands • norsk • polski • português • русский • Türkçe • українська • 中文(中国大陆) • 中文(台灣) • עברית • azərbaycanca • |
Release status: experimental

| Description | Wallace is a parametric version of the Printrbot design.
|
| License | |
| Author | |
| Contributors | |
| Based-on | |
| Categories | |
| CAD Models | |
| External Link |
Overview
The RepRap Wallace is named after Alfred Russel Wallace, who independently discovered the theory of evolution by natural selection after Darwin, but before he published. It is loosely based on the Printrbot, but is a complete redesign in OpenSCAD to be more robust (without the loose press-fit mountings), but still extremely simple. It is designed for use with 6mm smooth/threaded rods and NEMA14 motors like the ones used in the Huxley design, and LM6UU bearings for linear motion, though its parametric nature means that NEMA17/M8/LM8UU versions will also be possible. Depending on the rod sizes, Wallace can be configured with a full size 200x200x140mm build volume, or larger or smaller as desired. STLs can be found on thingverse, the source is on Github, and the latest updates/previews can be found on Whosawhatsis' Google+ page. This design is a work in progress. Whosawhatsis discussed V2 at https://plus.google.com/u/0/105535247347788377245/posts/SRZpmqRG2on .
- Not to be confused with the Wally RepRap.
Specifications
- Printed Parts: 26
- Non-Printed Parts: ~125+ (4 steppers, 7 threaded rods , 6 smooth rods, 11 LM6UUs, 6 323s, 2 belts, + ~89 misc. hardware, +extruder, +electronics)
- Material Cost: ~200 ($50 printed, 60 steppers, 30 rods, 20 bearings, 10 belts, 30 misc.)
- Cost: ???
- Printing Size: 200mm x 200mm x 140mm (8"x8"x5.5")
- Precision: X,Y,Z=0.07,0.07, 0.025mm (with 4,4,2 microstepping)
- Speed: ??? (position/printing)
The initial build guide is the Wallace Build Manual.
--MrJohn 01:25, 3 February 2012 (UTC)
Video showing Printf.bot first print on 2011.12.31, driven by R2C2 (recorded on 2011.12.31 by Casainho):
<videoflash>Igdbltngic0</videoflash>
Video recorded on 2011.12.17 by Whosawhatsis:
<videoflash>0QrEmGlZT0w</videoflash>
<videoflash>fq3ihIT_C9s</videoflash>
Parts
In addition to the printed parts, the following parts are required (this is a tentative list, and the parts WILL change before the design is complete):
- 2 high-torque (~20 ozf-in) NEMA14 stepper motors. Sources:
- Pololu
- Zapp Automation
- Waterott for 20 oz-in non-dual shaft in Europe
- 2 low-torque or high-torque NEMA14 stepper motors for the Z-axis.
- 1 set of electronics
- 1 extruder
- 3 pairs of 6mm smooth rods (measurements will depend on desired build volume. 350 mm X 320mm X 350mm gives about 200 x 200 x 170mm).
- McMaster-Carr
- Fastenal
- ebay
- These can probably also be found locally.
- 3.5 pairs of M6 threaded rods (measurements will depend on desired build volume, 1 pair between bases, 1 pair as z-leadscrews, 1 pair as feet, and 1 more bar between z-top-clamps).
- McMaster-Carr
- Fastenal
- ebay
- These can probably also be found locally.
- 16 M6 nuts -- (8 for threaded X-rod, 2 for Z leadscrews, 4 for Z_top_clamp, 4 for Y-Idler)
- These can be found locally.
- 2 M6 nylock nuts -- (for the leadscrew couplers. You may substitute 2 regular M6 nuts tightened against each other to lock them in place.)
- These can be found locally.
- 12 M6 washers. (8 for threaded X-rod, 4 for threaded Z-top rod)
- These can be found locally.
- 11 LM6UU linear bearings. (4 Y-bars/Base, 4 Z-bars/X-ends, 3 X-bars/X-carriage)
- 3 623 bearings. (6 needed for the double-bearing idlers)
- 17 10mm M3 screws -- (8 base motor + Y-bearing clamps, 4 Z-sockets, 2 drive pulleys, 2 Z-connectors, 1 X-belt clamp)
- These can be found locally.
- 7 30mm M3 screw -- (2 Y-idlers, 2 Y-belt mounts, 3 X-motor mount? (x motor mount may bottom out at ~15mm))
- These can be found locally.
- 2 50mm M3 -- (X idlers + x-bar/z-bearing clamps)
- These can be found locally.
- Approximately 13 M3 nuts and washers.
- These can be found locally.
- 1 sheet of MDF or other flat material (measurements will depend on desired build volume).
- You can buy this locally and cut to size.
- 2 belts
Printed parts
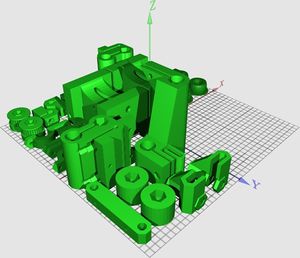 -- An STL for all printed parts on 3/4 of a single 200x200x70mm plate. STLs are also available as three 100x100mm plates on the thingiverse page -- An STL for all printed parts on 3/4 of a single 200x200x70mm plate. STLs are also available as three 100x100mm plates on the thingiverse page
|

- 2 bases
- Get it on thingiverse page
- 4 bed mounts
- Get it on thingiverse page
- 2 leadscrew couplers
- Get it on thingiverse page
- 1 X carriage
- Get it on thingiverse page
- 1 X end left
- Get it on thingiverse page
- 1 X end right
- Get it on thingiverse page
- 4 Y bearing retainers
- Get it on thingiverse page
- 1 Y idler
- Get it on thingiverse page
- 3 Idler pulleys (use a 4th pulley to properly align the X belt if your drive pulley diameter does not match)
- Get it on thingiverse page
- 2 drive pulleys
- There are 29 tooth MXL/GT2 pulleys
 on the thingiverse page. These pulleys are high precision teeth for extrusion, and may need special care in skeining and extrusion. Per his comment on the thingiverse page, Whosawhatsis had good results in ABS .29mm layers with 1.5 w/t for 0.435 thread width. Alternately, if you are unsure of the quality of the printing process, use XL/T5 pulleys like thing:11256 with appropriate belts. (Using 12 teeth in XL or GT2 would about match the idler diameters.)
on the thingiverse page. These pulleys are high precision teeth for extrusion, and may need special care in skeining and extrusion. Per his comment on the thingiverse page, Whosawhatsis had good results in ABS .29mm layers with 1.5 w/t for 0.435 thread width. Alternately, if you are unsure of the quality of the printing process, use XL/T5 pulleys like thing:11256 with appropriate belts. (Using 12 teeth in XL or GT2 would about match the idler diameters.)
- There are 29 tooth MXL/GT2 pulleys
Optional:
- 4 Feet
- Get it on thingiverse page