RAPS128
|
English • العربية • български • català • čeština • Deutsch • Ελληνικά • español • فارسی • français • hrvatski • magyar • italiano • română • 日本語 • 한국어 • lietuvių • Nederlands • norsk • polski • português • русский • Türkçe • українська • 中文(中国大陆) • 中文(台灣) • עברית • azərbaycanca • |
Release status: working

| Description | RAPS128 driver
|
| License | |
| Author | |
| Contributors | |
| Based-on | |
| Categories | |
| CAD Models | -
|
| External Link |
RAPS128 is an abbreviation of "RADDS Power Stepper Driver with 1/128 Microstepping". The building size is the same as the Pololu drivers and the pin use is compatible, but not exactly the same as the Pololus. The driver can be used on RAMPS, Rumba and other RepRap electronics, but 8-Bit CPU based electronics is to slow for the microstepping 1/64 and 1/128.
Spezifikation
- Treiber-IC: THB6128 für präzisen und leisen Motorlauf
- Motorspannung 10 - 25 V
- Motor-Spitzenstrom 0 - 2,2 A (einstellbar mittels Poti)
- Digitaleingänge kompatibel mit 3,3 und 5 V Mikrocontrollern
- Decay-Methode (Spannungsabbau in den Motorspulen) einstellbar mittels Poti
- Sleep- und Boost-Modus (von RepRap-Elektroniken bisher nicht unterstützt)
- Logikspannung wird aus der Motorspannung erzeugt (kein weiterer Anschluß erforderlich)
- Kurzschluss-Abschaltung
- Enable = HIGH (bei Pololu-Treibern LOW, in Firmware invertieren!)

Oberseite. Drehung des VREF-Potis im Uhrzeigersinn erhöht den Strom.

Unterseite mit 17 Bauteilen auf kleinstem Raum :-)

Mit Kühlkörper auf RADDS-Board. Die Pfeile zeigen die Messpunkte für die Referenzspannung (Poti-Schleifer und Masse).



Allgemeines
Der Schrittmotortreiber schaltet mit sehr hoher Taktfrequenz den Motorstrom ein und aus. Während einer Einschalt-Phase wird der durch die Motorspule fließende Strom gemessen und wieder abgeschaltet, wenn er den mittels Referenzspannung eingestellten Strom erreicht hat. Dieser Spitzenstrom fließt nicht im Mittel und kann daher nicht einfach - z.B. anhand der Anzeige eines Labor-Netzteils - gemessen werden. Die beiden folgenden Diagramme vermitteln einen Eindruck, wie Referenzspannung, Treiber-Erwärmung, mittlerer Motorstrom, Motor-Spitzenstrom und Drehmoment zusammenhängen.
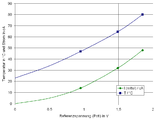
Temperatur des Kühlkörpers (horizontal, kein Lüfter) und mittlerer Strom in Centi-Ampere (Labornetzgerät-Anzeige) in Abhängigkeit der Referenzspannung (Poti). Empfohlener Spannungsbereich: 0,8 bis 1,6 V. Das entspricht einem theoretischen Motor-Spitzenstrom von 0,73 - 1,46 A, Gleichung: I = k U mit k = 0,91 A/V.
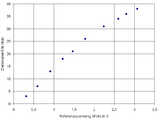
Drehmoment eines Schrittmotors in Abhängigkeit von der Referenzspannung bei einer Drehzahl von ca. 100 U/min und 128 Mikroschritten pro Vollschritt (Messung siehe Stepper_torque/de, Motor: Wantai 42BYGHW609 mit 39 Ncm bei 1,7 A (Herstellerangabe). Der laut THB6128-Spezifikation zulässige Motor-Spitzenstrom von 2,2 A (VRef = 2,4 V) ist hier überschritten.


Dokumentation
Dieses Werk bzw. der Inhalt steht unter einer Creative Commons 3.0 Unported License: Namensnennung - Nicht-kommerziell - Weitergabe unter gleichen Bedingungen.
- Schaltplan File:RAPS128-sch.pdf
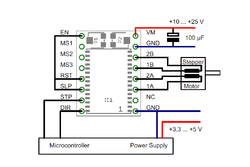
- Minimal-Anschlussbelegung:
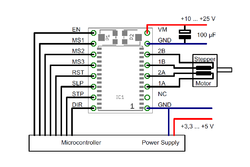
- Maximal-Anschlussbelegung:


Sleep-Pin (SLP): Wenn der Sleep-Pin mit einem digitalen Ausgang eines Mikrocontrollers verbunden wird, dann kann die Referenzspannung und damit der Motorstrom verändert werden. Digital LOW (0 V) reduziert den Motorstrom um ca. 45% und digital HIGH (+5 V) hebt ihn um ca. 30% an (+3,3 V => +5%). Basis der Prozentangaben ist ein nicht verbundener Sleep-Pin bzw. ein auf INPUT eingestellter Mikrocontroller-Pin.
Bei RepRap-Elektroniken ist der Sleep-Pin häufig mit Reset (RST) verbunden. In diesem Fall liefert der Sleep-Pin ca. 3 V und aktiviert damit den Treiber (RST = HIGH).
Mikroschritte, off = nicht verbunden oder Masse, on = 2 - 5 V bzw. logisch HIGH, die Nummerierung MS1 - MS3 entspricht der Mikroschalter-Nummer auf dem RADDS-Board:

Zum Einstellen der Mikroschritte muss das RADDS-Board vom Arduino-DUE abgenommen werden. Um dies zu vereinfachen, wurde ein Demontagewerkzeug erstellt.
Die empfohlenen Kühlkörper sind ICK PGA 6 x 6 x 14 von fischerelektronik. Anders als die Typbezeichnung erwarten lässt, sind sie 14 x 14 x 14 mm groß.
Demontage-Werkzeug

