RepRap Options/fr
/!\ Page en cours de traduction /!\
Cette page a pour but d'éclaircir, comment toutes les éléments pour créer une RepRap s'assemblent.
Cependant, si vous voulez sauter cette étape et allé directement à l'étape où on se salit les main alors le mieux est de jeter un oeil au guide incomplet du débutant RepRap et à la catégorie instructions de montage. En plus de ces guides, vous devriez aussi regarder la section Modèles ci-dessous.

Cela étant dit, pour obtenir un aperçu lointain, nous devons commencer à discuter des différents modèles de RepRaps, puis aller sur les quatre principales composantes d'une RepRap :
- La chaîne d'outils logiciel.
- L'electronique.
- La partie mécanique.
- L'extrudeur.
Modèles
Il y a maintenant un nombre grandissant d'instructions de montage détaillé et de qualité pour les RepRaps ! Cliquez sur les noms sous les images pour voir plus de chaque design.

RepRap Morgan (license: GPL)

RepRapPro Mendel (license: GPL)

RepRapPro Huxley (license: GPL)

Eventorbot (license: CC-BY-SA)

Prusa i3 Rework Introduction (license: GPL)

MendelMax 2.0 (license: GPL)
Mendel90 (license: GPL, Creative Commons)
















Chaine d'outils logiciels
La chaine d'outils logiciels peut être grossièrement découpé en 3 parties :
- Logiciels CAO (CAD tools).
- Logiciels FAO (CAM tools).
- Firmware pour la carte electronique.
Outils CAO
Les logiciels de Conception Assisté par Ordinateur, ou CAO (CAD en anglais), sont utilisés pour dessiner les pièces en 3D.
Logiciel CAO
... à traduire ...
Conception Assisté par Ordinateur
Fichiers CAO
... à traduire ...
Outils FAO
Les logiciels de Fabrication Assisté par Ordinateur, ou FAO (CAM en anglais), ont pour but de traduire les fichiers CAO en language machine utilisé par l'électronique des RepRap.
Logiciel FAO
... à traduire ...
Logiciel de découpe en tranche
... à traduire ...
Interpréteur de G-code
... à traduire ...
Envoyeur de G-code
... à traduire ...
Fichier FAO
... à traduire ...
Firmware
L'électronique d'une RepRap est piloté par un processeur bon marché comme le processeur AVR d'Atmel. Les processeurs Atmel sont ceux qu'utilisent les cartes Arduino. Ces processeurs sont un peu poussifs, même comparé aux vieux PC de 10 ou 15 ans qu'on trouve dans les poubelles maintenant. Peu importe, ce sont des processeurs, donc ils savent faire tourner des programmes basiques. Ce programme basique qu'ils font tourner est le firmware de la RepRap.
De toute la chaîne de programmes qui fait fonctionner une RepRap, la portion qu'est le firmware est la plus proche de la programmation au sens propre. Techniquement, le terme pour ce que vous faites avec le firmware est appelé compilation croisée.
Ce processus se déroule plus ou moins suivant ces étapes :
- Installé l'IDE Arduino sur votre PC.
- Télécharger des codes sources de firmware d'un site web.
- Faites des modifications mineurs au code source pour spécifier quel matériel vous avez.
- Compilez le firmware en utilisant l'IDE d'Arduino.
- Connectez le contrôleur à votre PC avec un câble USB.
- Charger le firmware dans le processeur de votre contrôleur.
G-codes
... à traduire ...
Logiciel du firmware
... à traduire ...
Fichiers du firmware
... à traduire ...
Electronique
Vue générale
En général, tous les électroniques de RepRap sont divisés en 5 différentes parties :
Le contrôleur
Le contrôleur est le cerveau de la RepRap. A peu près tous les contrôleurs de RepRap sont basés sur le micro-contrôleur Arduino. Bien que de nombreuses variations existes, elles sont interchangeable et basiquement font la même chose. Parfois, le contrôleur est un circuit autonome avec des puces dessus, parfois le contrôleur est un Arduino Mega avec une carte ajouté dessus appelé 'shield'. Pour en voir plus sur le sujet, consultez la liste des électroniques.
Moteurs pas à pas
Un moteur pas à pas est un type de moteur électrique qui peut être contrôlé avec précision à l'aide d'un contrôleur. La plus part des RepRaps utilisent 4 à 5 moteurs pas à pas. 3 à 4 moteurs contrôlent les mouvement des axes x/y/z (parfois l'axe z est contrôlé par 2 moteurs) et 1 moteur pour contrôle l'extrudeur.
Contrôleur de moteur pas à pas
Un contrôleur de moteur pas à pas est un circuit qui a le rôle d'interface entre le contrôleur et le moteur pas à pas. Il permet de simplifier le signal envoyé par le contrôleur pour ensuite le convertir en un signal qui donne les ordres de mouvement adapté au moteur.
On peut voir les contrôleurs de moteur pas à pas parfois :
- sur des cartes séparés qui sont liés au contrôleur par des câbles.
- sur de petites cartes que l'ont branche directement sur le contrôleur lui-même. Dans ce cas, le contrôleur aura la place pour au moins 4 de ces petites circuits (un pour chaque moteur pas à pas).
- soudés directement sur la carte du contrôleur lui-même. Cette option ne sera pas à privilégier pour une RepRap à stade expérimental.
Fins de courses
Un fin de course est un circuit très petit et simple avec une sorte d'interrupteur dessus qui signalera à l'imprimante si elle se déplace trop loin dans une direction. Il y en a normalement 6 : 2 sur chaque axe. Une fin de course est connecté par des fils soit :
- au contrôleur.
- au contrôleur de moteur pas à pas.
Le plateau d'impression
Le plateau d'impression est sur quoi la RepRap extrude le plastique, où la pièce plastique est construite.
Bien qu'un lit chauffant est considéré comme optionnel sur une RepRap, il devient souvent nécessaire voir partie intégrante d'une RepRap opérationnel sur le long terme. Sans lit chauffant, les pièces ont tendance à refroidir trop vite. Cela a pour effet de déformer les coins (comme le plastique se rétracte en se refroidissant) ou les pièces se détachent trop tôt du plateau d'impression durant l'impression.
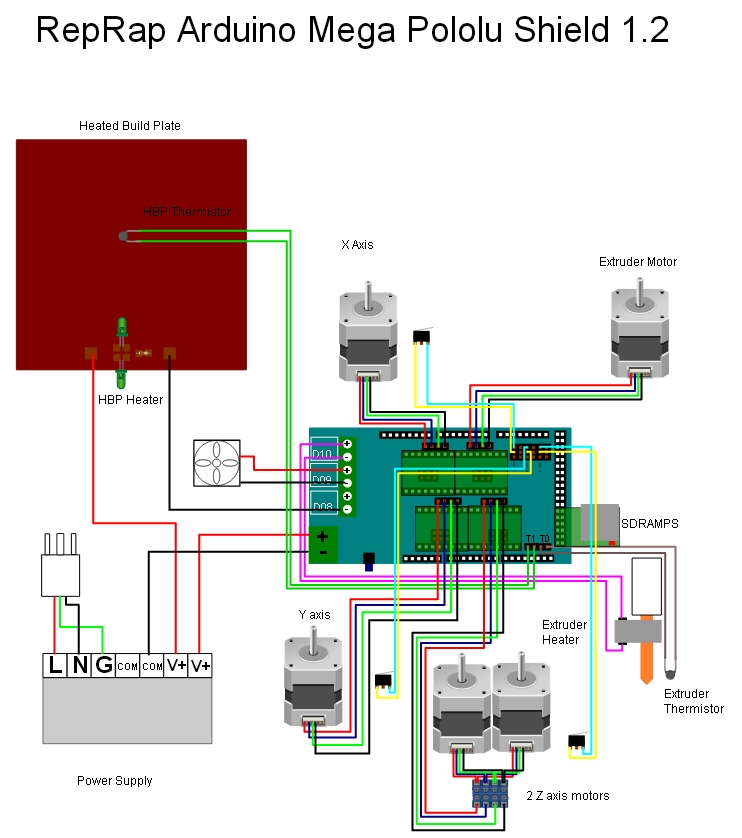
Le lit chauffant fonctionne suivant le même principe qu'une grille pain. C'est juste une grande résistance avec un capteur de température. voir également :
- Lit chauffant PCB
- Schéma de cablage d'une RAMPS 1.2.
- Article sur l'assemblage du lit chauffant d'une Prusa Mendel
- Article plus récent sur la RepRap pro Tricolor
{kind=link}
Les ventilateurs
... à écrire ...
Plus d'info
Pour plus d'information sur l'électronique des RepRap, consultez la liste des électroniques.
Partie Mécanique
Quand on parle de la partie mécanique, cela peut généralement être séparé en 2 parties :
- Entrainement des axes X,Y et Z
- Le plateau d'impression
Axes de déplacement X/Y/Z
Quand on fait face à la RepRap :
- L'axe X est le déplacement de la gauche vers la droite.
- L'axe Y est le déplacement du fond vers l'avant.
- L'axe Z est le déplacement du bas vers le haut.
Les mouvements linéaires sont généralement accomplies en utilisant une des 2 méthodes suivant :
- Poulies et courroie cranté.
- Tige fileté ou vis d'entrainement.
Poulies et courroies sont bons pour les déplacements rapides avec de faibles masses en mouvement. Alors que la vis sans fin est plus destiné aux mouvements lents transmettant de la force. La plupart des RepRap utilisent une combinaison de courroies pour X/Y et des tiges filetés pour Z.
Courroies et Poulies
Quand on parle de précision, le plus important dans votre RepRap est l'ensemble poulie/courroie. L'état actuel de l'art est la courroie GT2, combiné avec une poulie usinée qui correspond parfaitement au diamètre de l'arbre moteur (normalement 5 mm).
Voici plusieurs ensembles poulie/courroie actuellement (mars 2012) les plus utilisés :
- T5
- Ce sont des courroies métrique asynchrone. Elles ont des dents trapézoîdales avec un jeu volontairement pour réduire l'usure et le bruit. Elles sont appropriées pour les applications uni-directionnels. Elles sont difficiles à trouver en Amérique du Nord. Les poulies peuvent être imprimés. En utilisant une poulie imprimé, vous optiendrez une précision équivalente à un ensemble poulie/courroie MXL avec un mauvais diamètre d'alésage.
- T2.5
- Comme la T5, ce sont des courroies métrique asynchrone. Elles ont des pas de 2,5 mm (0,098") et les poulies sont imprimables. Avec le même diamètre de poulie, elles ont une meilleur adhérence comparé à la T5 et donneront de meilleurs résultats. Les meilleurs résultats sont avec des poulies métalliques grâce à un profile de denture plus fin.
- MXL
- Cela signifie "Mini eXtra-Light". Comme la T5 et la T2.5, ce sont aussi des courroies asynchrone mais elles sont communes en Amérique du Nord car elles suivent des dimensions impériales. La distance entre dent est 0,08" (2,032 mm). Vous *devriez* être capable de trouvez des poulies qui ont un alésage de 5 mm mais ça n'est pas facile. La plus part des moteurs pas à pas ont des arbres de sortie de 5 mm de diamètre.
- GT2
- Ce sont des courroies crantés Gates PowerGrip® GT®2 industriel synchrone. Elles ont de bonne caracteristiques technique et à la différence des courroies MXL et T5, la courroie GT2 a des dents rondes avec peu de jeu. Elles sont difficiles à trouver où que ce soit.
Pour plus de détails, voir choisir l'ensemble poulie/courroie.
Colonnes de guidage
... à traduire ...
Notes on Backlash
... à traduire ...
Surface d'impression
... à traduire ...
Plateau supérieur
... à traduire ...
Plateau inférieur
... à traduire ...
Extrudeur
... à traduire ...
Cold End
... à traduire ...
Hot End
... à traduire ...
Filament
... à traduire ...
Notes on PID
Parfois vous allez entendre parler de PID à propos des extrudeurs. Un PID est un algorithme en boucle fermé que les ingénieurs utilisent depuis des années. C'est basiquement une équation pour stabiliser un système qui tendrait à osciller.
Par exemple, quand vous conduisez votre voiture sur la route, vous fonctionnez suivant un principe similaire au PID en ajustant en permanence avec le volant pour que votre voiture suive la route. Si vous le faites petit à petit, la trajectoire est fluide. Mais si vous attendez de toucher les lignes pour corriger, vous allez faire des zig zag sur la route. La trajectoire ne sera pas aussi optimisé.