RBS Overview
Release status: working

| Description | RepRap Building System
|
| License | |
| Author | |
| Contributors | |
| Based-on | |
| Categories | |
| CAD Models | |
| External Link |

Contents
Description
- Eiffel is a steel square-tube CNC router made with tri-lapping joints, aka Tri-Joints

We can if we want try to extend this use of gridbeam and erector-set like technology into a Eiffel/Building_System system that leverages RepRap to make lots of mechatronic systems using grid beam and grid sheet, and 3D printed gears, etc., but that's sort of beyond the scope of this project. (Step 2, technically)
Which resulted in Replimat.
Subpages
- Beam
- Grid
- Gears
- Fittings - everything that's not a gear, etc.
- Extruder - That works, but we need everything else.
- Aluminum Extrusion - proposed addition.
Open-Edit Working Notes.
The RepRap Building System is a (mostly) self-replicating and (maximally) cross-compatible building system. These are working notes, leading towards making models and then a formal proposal. It may be too early to talk this up in other places. Or to make a big deal about Eiffel. What the hell, let's hack on it.
The means a machine/Building System that makes its own Gears. And drills its own Beam and Sheet. And so on. Including 4"x4" steel beam, so we work at toybench scale and large scale.
This is a cross between what is currently called grid beam and old-fashioned Erector set, but we will make RepRaps and Eiffel from it.
The 'RepRap Building System', aka 'RBS', aka 'Building System' is made from grid beam type perforated beams, store-bought fasteners, and RepRap-printed parts like gears and fittings to hold stepper motors and smooth rods.
For more information, see Eiffel.
This will engage folk who work with their hands well, but are not computer oriented.
And it will be lots of fun.
Files and Parts
As a gentle style recommendation, it's good to try to keep all your parts and files on the RepRap wiki rather than scattered around so that Mr. Bunny doesn't have to use a scripts and so on to get stuff back onto the wiki.
Forum thread
Motivation
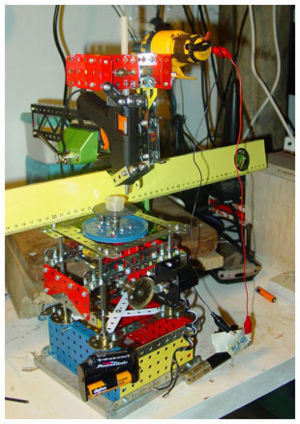
- Vik Olliver's Meccano-set based RepRap prototype.

- Merkur based apparatus for centrifugal casting of soft contact lenses by Otto Wichterle

- Eiffel is an idea for making a RepRap using RBS for the parts, and for making RBS.

Sourcing
Still an open question. Probably going to be Sebastien + drill press and jig.
Motion Control
A:So what do you need? Besides a miracle. B: Gears. Lots of gears.
Motion Control and Measurement
- Internal Measurement
To operate for long periods without supervision, stepper motors and gears are not enough. Something with more accuracy, repeatability, and stability is needed. On approach is linear encoders on each axis. Typically these have been optical quadrature or absolute grey code encoders, but newer, contamination tolerant encoders using magnetic stripes are now being used. These will allow the use of smaller or less expensive stepper motors -- for example, Microstepping with optical feedback -- because occasional skipped steps are no longer a danger to construction. Or DC brushed motors can be used for less cost, greater electrical efficiency, and faster speeds -- see RepRapServo 1 0. It also allows for lower quality gears, non-toothed belts, ropes or cables that do not have perfect performance can be used if the linear encoder is attached directly to the final stage.
- External Measurement
When building items bigger than the machine, or better yet a machine that attaches large pieces to make larger structures is going to need some way of measuring distances, lengths, widths, offsets, etc outside the device. Cameras and image analysis software can perform some of that but not all. Cameras plus structured light (spinning laser beam that defines a plane that the camera is not in, projecting crosshatch lines or fiducial markers or lines) can handle more. Ultrasonic and laser rangefinders will be needed for the longer distances that can help determine how much beam has been extruded so far, how far away is the attach point it must connect to, etc. There will also be close up work adding fasteners, doing fine alignment before bolting or welding, painting or adding rust/fire proofing. Lasers, RF, or ultrasonic ranging will also be needed between fabricator bots and builder bots to know where to make/send parts next and how big they need to be.
- Feedback and Control Systems
Using DC motors or low precision steppers, gear trains, etc will require feedback control from the internal and external measuring devices. The standard PID can provide this feedback and control. They are more flexible than counting steps on a stepper motor, but also require tweaking for each application. It is possible to automate some of this parameter adjustment. PIDs should also be used in many internal operations like extruder temperatures, feed rates, etc.
Entrepreneur-based research
If it is any good, we will have to make kits to test the ideas. This process will putting kits in front of 3rd graders. This is also a way for members of the RepRap community to generate wealth, and make toys for kids.
Digression
There are, however, two new and open-source projects of relevance. Contraptor is like inch-width Erector, with motion control systems already built and demonstrated. MakerBeam is a T-slot system in 10mm pitch, making it fully Merkur compatible. It is also scale-compatible with larger T-slot systems, making it useful for prototyping larger assemblies.
Contraptor is oriented around building 3-d gantry robots, and uses a perforated beam construction centered around angle aluminum. MakerBeam uses a square T-Slot beam, which results in good orthogonality. Contraptor's inch-pitch is compatible with half-inch systems such as Meccano and the proposed RBS, while the centimeter pitch of MakerBeam is a) easily adjusted for due to the 'bolt anywhere' nature of T slots and b) would be readily compatible with 20 or 25mm pitch metric systems, including metric Contraptor or larger T-slots.
We may, if the major stakeholders (RepRap, Contraptor, and Makerbeam) cooperate and agree, attempt a slow 'reverse fork' and eventually merge the software base, hardware base, and so on. In this case we could either mirror the relevant portions of our wikis, or start with said mirroring and eventually bootstrap the RepRap website into a debian-like apt-get repository, like SKDB. (See Library). The later course promises the greatest functionality for all of our user/builders. And speaking plainly, the more each system is functional and useful, the more our users will start cross-fertilizing our systems, with our blessing or without it.