RepRap using DC Motors!
Posted by lucasmun09
|
Re: RepRap using DC Motors! July 14, 2014 11:51AM |
Registered: 10 years ago Posts: 137 |
[forums.reprap.org]
Bye
Prusa i3 R2 + The Shell - Saintsmart Ramps 1.4 - Mega2560 R3 - Driver A4988 - Firmware MarlinKimbra
Mini Kossel - Alligator - Firmware MarlinKimbra4due
Bye
Prusa i3 R2 + The Shell - Saintsmart Ramps 1.4 - Mega2560 R3 - Driver A4988 - Firmware MarlinKimbra
Mini Kossel - Alligator - Firmware MarlinKimbra4due
|
Re: RepRap using DC Motors! July 17, 2014 06:25PM |
Registered: 9 years ago Posts: 1 |
Hey lucas, I just joined the forum and stumbled on your thread. While I "get" you're angle that this can technically be done with DC motors and an encoder, trust me when I tell you that it can't be done easily or well. While I have yet to build a printer (hence why I joined the forum, to start collecting build info) I do work with motor controls everyday. Actually, I repair motor drive units: DC, DC servo, AC servo, VFD, etc. If your goal was to just do it to show that it technically can be done regardless of cost and time spent I'd say go for it. But really you're best bet would be to just cave and go with some cheap stepper motors. It will end up being both cheaper and quicker.
If you're dead set on salvage you actually can find stepper motors in old printer, copiers, etc. I actually have 2 or three kicking around somewhere that I salvaged out of an old copier (I think). The trick would be finding out what equipment has the motors you need and getting you're hands on enough of them to have all matching motors. Either that or spend time fidgeting with mismatched motors trying to get them to work well together.
The only other thing I can possibly think of would be maybe use a hobby servo motor modified for 360 degree spin and some sort of positioning feedback. I imagine it would be deathly slow though.
If you're dead set on salvage you actually can find stepper motors in old printer, copiers, etc. I actually have 2 or three kicking around somewhere that I salvaged out of an old copier (I think). The trick would be finding out what equipment has the motors you need and getting you're hands on enough of them to have all matching motors. Either that or spend time fidgeting with mismatched motors trying to get them to work well together.
The only other thing I can possibly think of would be maybe use a hobby servo motor modified for 360 degree spin and some sort of positioning feedback. I imagine it would be deathly slow though.
|
Re: RepRap using DC Motors! July 22, 2014 10:09PM |
Registered: 10 years ago Posts: 118 |
I have been myself thinking about DC motors instead of steppers, with some kind of encoder.
I always want to push faster, and stepper motor is not well suited for higher speeds, the question is still having the accuracy as well.
A very cheap DC motor could run much faster than a stepper, with way higher torque (==more power!).
I really hope you can make this succeed!
I always want to push faster, and stepper motor is not well suited for higher speeds, the question is still having the accuracy as well.
A very cheap DC motor could run much faster than a stepper, with way higher torque (==more power!).
I really hope you can make this succeed!
|
Re: RepRap using DC Motors! July 22, 2014 10:17PM |
Registered: 10 years ago Posts: 118 |
WHY all this negativity?
Every time someone present a idea not conforming the standard people are naysaying!
As for PWM for DC motors -> that's actually the way most things control speed for DC motors!
DC motors can take a huge punishment, and last quite a long time, just look at RC cars - well during the time DC motors were the standard still! It's a choice between brush hardness and brush tension, probably lowish tension and semihard brushes could be good for this, long lasting and not ruining the collector as fast.
Every time someone present a idea not conforming the standard people are naysaying!
As for PWM for DC motors -> that's actually the way most things control speed for DC motors!
DC motors can take a huge punishment, and last quite a long time, just look at RC cars - well during the time DC motors were the standard still!
It's a choice between brush hardness and brush tension, probably lowish tension and semihard brushes could be good for this, long lasting and not ruining the collector as fast.
|
Re: RepRap using DC Motors! July 23, 2014 06:02PM |
Registered: 10 years ago Posts: 153 |
Quote
PulsedMedia
WHY all this negativity?
Every time someone present a idea not conforming the standard people are naysaying!
Whats being said is that it will take days of work to get this working, when for $11.80 usd at robotdigg.com you can have yourself a working stepper motor + driver.
But, once this is made, a junkpunk bot will be a lot more feasable, if this design proves effective.
I was thinking about this topic too as I have inkjet parts lying around.. as do many people. But, is it worth it?
Perhaps. You will learn a lot, that's for sure, but be prepared in case you fail.
That being said we learn most from our failures. I'll keep an eye on this thread
|
Re: RepRap using DC Motors! July 23, 2014 06:22PM |
Admin Registered: 16 years ago Posts: 13,889 |
... I have the guts from several inkjet-printers lying around somewhere (salvaged them for this sort of tinkering) - but got/found then all sorts of high quality gear around steppers, servos, encoders and such ...
Snd so I've refurbished a CNC-mill with servos+encoders for laser-engraving -- it's much more accurate and fast now, compared to stepper motors ... but compared in costs, this would be nearly twice the price
Viktor
--------
Aufruf zum Projekt "Müll-freie Meere" - [reprap.org] -- Deutsche Facebook-Gruppe - [www.facebook.com]
Call for the project "garbage-free seas" - [reprap.org]
Snd so I've refurbished a CNC-mill with servos+encoders for laser-engraving -- it's much more accurate and fast now, compared to stepper motors ... but compared in costs, this would be nearly twice the price
Viktor
--------
Aufruf zum Projekt "Müll-freie Meere" - [reprap.org] -- Deutsche Facebook-Gruppe - [www.facebook.com]
Call for the project "garbage-free seas" - [reprap.org]
|
Re: RepRap using DC Motors! July 24, 2014 04:21AM |
Registered: 10 years ago Posts: 153 |
Relevant project: [hackaday.io]
|
Re: RepRap using DC Motors! August 02, 2014 04:21PM |
Registered: 9 years ago Posts: 7 |
Quote
VDX
... I have the guts from several inkjet-printers lying around somewhere (salvaged them for this sort of tinkering) - but got/found then all sorts of high quality gear around steppers, servos, encoders and such ...
Snd so I've refurbished a CNC-mill with servos+encoders for laser-engraving -- it's much more accurate and fast now, compared to stepper motors ... but compared in costs, this would be nearly twice the price
I checked out some of your recent video clips and found it looks good. Are you using a dedicated driver (and microprocessor/DSP) for each motor? What is the max input rate accepted by the driver (assume it is pulse/dir driven)? What is the motor's gear ratio and encoder count (assume encoder is mounted directly on the motor shaft)? I thought that the DC motor and driver would cost much more than twice the price of comparable stepper mechanism.
Edited 4 time(s). Last edit at 08/02/2014 04:25PM by vn.
|
Re: RepRap using DC Motors! August 02, 2014 05:55PM |
Admin Registered: 16 years ago Posts: 13,889 |
... the motors are direct connected to spindles with 5mm travel and 2000 'encoder-steps' per turn, the drivers can handle up to 300 kHz, but the controller (a generic STM32) with the actual (proprietary) firmware can only handle 100kHz max ...
Viktor
--------
Aufruf zum Projekt "Müll-freie Meere" - [reprap.org] -- Deutsche Facebook-Gruppe - [www.facebook.com]
Call for the project "garbage-free seas" - [reprap.org]
Viktor
--------
Aufruf zum Projekt "Müll-freie Meere" - [reprap.org] -- Deutsche Facebook-Gruppe - [www.facebook.com]
Call for the project "garbage-free seas" - [reprap.org]
|
Re: RepRap using DC Motors! August 02, 2014 07:22PM |
Registered: 9 years ago Posts: 7 |
Quote
VDX
... the motors are direct connected to spindles with 5mm travel and 2000 'encoder-steps' per turn, the drivers can handle up to 300 kHz, but the controller (a generic STM32) with the actual (proprietary) firmware can only handle 100kHz max ...
Does the controller perform the closed loop control for the motor? Or it just generates the step+dir for all drivers?
|
Re: RepRap using DC Motors! August 03, 2014 03:05PM |
Admin Registered: 16 years ago Posts: 13,889 |
... the controller generates only the STEP+DIR-pulses with adjustable settings for max speeds and acceleration ... the drivers 'reads' the encoder and performs the closed loop on their own ...
Viktor
--------
Aufruf zum Projekt "Müll-freie Meere" - [reprap.org] -- Deutsche Facebook-Gruppe - [www.facebook.com]
Call for the project "garbage-free seas" - [reprap.org]
Viktor
--------
Aufruf zum Projekt "Müll-freie Meere" - [reprap.org] -- Deutsche Facebook-Gruppe - [www.facebook.com]
Call for the project "garbage-free seas" - [reprap.org]
|
Re: RepRap using DC Motors! August 06, 2014 05:41PM |
Registered: 9 years ago Posts: 7 |
Quote
VDX
... the controller generates only the STEP+DIR-pulses with adjustable settings for max speeds and acceleration ... the drivers 'reads' the encoder and performs the closed loop on their own ...
There are some Japanese made controller chip which can generate the pulse up to Mhz. Do you have the info of those drivers?
|
Re: RepRap using DC Motors! August 07, 2014 02:05PM |
Admin Registered: 16 years ago Posts: 13,889 |
... this DC-servo-drivers are good for 300kHz max ... but I too have three high-resolution microstepping stepper-drivers, that are specified for up to 10MHz @1/256 microstepping ...
Viktor
--------
Aufruf zum Projekt "Müll-freie Meere" - [reprap.org] -- Deutsche Facebook-Gruppe - [www.facebook.com]
Call for the project "garbage-free seas" - [reprap.org]
Viktor
--------
Aufruf zum Projekt "Müll-freie Meere" - [reprap.org] -- Deutsche Facebook-Gruppe - [www.facebook.com]
Call for the project "garbage-free seas" - [reprap.org]
|
Re: RepRap using DC Motors! November 14, 2014 08:21AM |
Registered: 9 years ago Posts: 159 |
hi all.. just my thoughts at this point, having not followed all the threads, so apologies if i missed any relavence.
would the feed back be advantagous eather to DC or stepper drive systems?
and 1200 dpi grid sytem would surely be good enough for even cnc presition?
all the bits are out there guys..just in seperates.
any one witht the golden dream.. ermmm, it goes like this, the backer takes the profits and keeps you just sweet enough but poor enough as to remain in their employment, hense they no likely the open sourse no way no how. its how it is unfortunatly....but only if you yourself give it to them.
Edited 1 time(s). Last edit at 11/14/2014 08:33AM by munchit1.
would the feed back be advantagous eather to DC or stepper drive systems?
and 1200 dpi grid sytem would surely be good enough for even cnc presition?
all the bits are out there guys..just in seperates.
any one witht the golden dream.. ermmm, it goes like this, the backer takes the profits and keeps you just sweet enough but poor enough as to remain in their employment, hense they no likely the open sourse no way no how. its how it is unfortunatly....but only if you yourself give it to them.
Edited 1 time(s). Last edit at 11/14/2014 08:33AM by munchit1.
|
Re: RepRap using DC Motors! November 17, 2014 03:46PM |
Registered: 10 years ago Posts: 469 |
I'm no expert here. However most people here seem to neglect a few things.
1 - steppers were designed to replace DC motors with encoders, with a lower cost and lower resolution as a bonus/compromise.
2 - Any serious robotics or CNC or even 3d printer uses DC motors with encoders when the machines are used for serious tasks.....
3 - The encoders were once expensive to manufacture and package. Today not so much.
4 - error correction on a printer can be exploited beyond what we are capable of today.
5 - Having encoders is the only way to get proper feedback between the analog world and digital world.
Let me extrapolate on #4 and some possibilities.
1 - Imagine being able to pause a print, move the head, and hit resume and it auto aligns back to where it was.
2 - NO MORE MISSED STEPS......
3 - Imagine being able to detect the filament jam with no external sensors, while the printer sends you a message stating your filament is jammed. (That's how inkjet printers do it FYI)
One more thing you guys are forgetting, DC motors are built for power, with today's RC car motors, we can have nearly 1/2HP of surge power with the weight of a nema 14...... We do not have to use brushed DC motors, there are brushless alternatives.
Imagine a DELTA printer that can have real world acceleration of 3000mm/s or more, while being able to print with no missed steps..... (note to self, set head temp at 500c, and watch the filament wheel turn into dust)
Another thing we forget, and we argue about horsepower available on micro controllers, as of now the ramps/mega combo is tapped out as is. The newer generation of 32 micro controllers is an order of magnitude more powerful. There will come a point where the steppers available will be the limiting factor. They are not far off from that now.
My Personal Blog. Build blog.
[engineerd3d.ddns.net]
Modicum V1 sold on e-bay user jaguarking11
1 - steppers were designed to replace DC motors with encoders, with a lower cost and lower resolution as a bonus/compromise.
2 - Any serious robotics or CNC or even 3d printer uses DC motors with encoders when the machines are used for serious tasks.....
3 - The encoders were once expensive to manufacture and package. Today not so much.
4 - error correction on a printer can be exploited beyond what we are capable of today.
5 - Having encoders is the only way to get proper feedback between the analog world and digital world.
Let me extrapolate on #4 and some possibilities.
1 - Imagine being able to pause a print, move the head, and hit resume and it auto aligns back to where it was.
2 - NO MORE MISSED STEPS......
3 - Imagine being able to detect the filament jam with no external sensors, while the printer sends you a message stating your filament is jammed. (That's how inkjet printers do it FYI)
One more thing you guys are forgetting, DC motors are built for power, with today's RC car motors, we can have nearly 1/2HP of surge power with the weight of a nema 14...... We do not have to use brushed DC motors, there are brushless alternatives.
Imagine a DELTA printer that can have real world acceleration of 3000mm/s or more, while being able to print with no missed steps..... (note to self, set head temp at 500c, and watch the filament wheel turn into dust)
Another thing we forget, and we argue about horsepower available on micro controllers, as of now the ramps/mega combo is tapped out as is. The newer generation of 32 micro controllers is an order of magnitude more powerful. There will come a point where the steppers available will be the limiting factor. They are not far off from that now.
My Personal Blog. Build blog.
[engineerd3d.ddns.net]
Modicum V1 sold on e-bay user jaguarking11
|
Re: RepRap using DC Motors! November 18, 2014 09:15PM |
Registered: 9 years ago Posts: 280 |
I may be stating the obvious but you guys ARE talking about PID control of a DC motor, right? The important thing is the encoder, not the DC motor. You can use the encoder with the stepper too because with the encoder you have FEEDBACK. A magic word All it takes is one mis-step of the stepper and it never knows it is now always one-step off. Feedback can keep that from happening. (or more accurately: fix it on the fly)
All it takes is one mis-step of the stepper and it never knows it is now always one-step off. Feedback can keep that from happening. (or more accurately: fix it on the fly)
|
Re: RepRap using DC Motors! November 19, 2014 04:22AM |
Registered: 9 years ago Posts: 1,011 |
I dunno why this topic is still alive. It's an apprentice hobbyist topic, without any knowledge of scientific basics. lucasmun09 gave up several month ago. Maybe the reason why is you can't reinvent the weel. Steppers and servos were engineered because you can't position accurately a DC motor and it won't have any significant holding torque. You want to control motor's position to synchronise both axis and extruder. Through there's a big missunderstanding. The encoder strip on inkjet printers does not control the motor but synchronize the ink deposition with the position of the printer's head. So, no matter the motion of the DC motor, it's speed and so on. If you're able to fuse and deposit accurately filament as fast as an inkjet head can do it, then you could use a DC motor. Otherwise, you can't. As simple as that.
Collective intelligence emerges when a group of people work together effectively. Prusa i3 Folger (A lot of the parts are wrong, boring !)
Collective intelligence emerges when a group of people work together effectively. Prusa i3 Folger (A lot of the parts are wrong, boring !)
|
Re: RepRap using DC Motors! December 10, 2014 02:37PM |
Registered: 9 years ago Posts: 20 |
Hi man!
I don't know how far you've gone with your project (since I didn't read all of the posts...) but I'm tryin to do the same thing using a different microcontroller than arduino (from ST microelectronics) 
I'm a young control engineer and I have already worked with "handmade" servo before...here's my post on the italian reprap forum:
[forums.reprap.org]
I'm still workin at it (and I think It'll take quite a long time...), but we can share knowledge and help each other maybe. If you make any progress let me know about, if you have any questions don't hesitate to ask.
Cheers
A.
EDIT: @zavashier, I'm afraid I have to tell you're absolutely wrong. A well-controller DC motor can be as fast and precise as no stepping motor can be, the strip in the printer is part of a linear encoder, which is a position sensor that can be used to close one or more control feedback loops.
Edited 1 time(s). Last edit at 12/10/2014 02:41PM by ApBrandy.
I don't know how far you've gone with your project (since I didn't read all of the posts...
) but I'm tryin to do the same thing using a different microcontroller than arduino (from ST microelectronics) I'm a young control engineer and I have already worked with "handmade" servo before...here's my post on the italian reprap forum:
[forums.reprap.org]
I'm still workin at it (and I think It'll take quite a long time...), but we can share knowledge and help each other maybe. If you make any progress let me know about, if you have any questions don't hesitate to ask.
Cheers
A.
EDIT: @zavashier, I'm afraid I have to tell you're absolutely wrong. A well-controller DC motor can be as fast and precise as no stepping motor can be, the strip in the printer is part of a linear encoder, which is a position sensor that can be used to close one or more control feedback loops.
Edited 1 time(s). Last edit at 12/10/2014 02:41PM by ApBrandy.
|
Re: RepRap using DC Motors! December 10, 2014 05:20PM |
Registered: 9 years ago Posts: 1,011 |
Yep, and you can call that a servomotor 
Collective intelligence emerges when a group of people work together effectively. Prusa i3 Folger (A lot of the parts are wrong, boring !)
Collective intelligence emerges when a group of people work together effectively. Prusa i3 Folger (A lot of the parts are wrong, boring !)
|
Re: RepRap using DC Motors! December 11, 2014 04:07AM |
Admin Registered: 16 years ago Posts: 13,889 |
... you can call a stepper with attached encoder a 'servo' if it's operated closed-loop - I have some high torque steppers with 1000 full-steps /10000 microsteps with 4096lpu-encoders (16384 'clicks' per turn) on the shaft and special drivers for them with 20kHz at full-step or 200kHz at 1/10 microstepping ...
Viktor
--------
Aufruf zum Projekt "Müll-freie Meere" - [reprap.org] -- Deutsche Facebook-Gruppe - [www.facebook.com]
Call for the project "garbage-free seas" - [reprap.org]
Viktor
--------
Aufruf zum Projekt "Müll-freie Meere" - [reprap.org] -- Deutsche Facebook-Gruppe - [www.facebook.com]
Call for the project "garbage-free seas" - [reprap.org]
|
Re: RepRap using DC Motors! December 12, 2014 05:14PM |
Registered: 9 years ago Posts: 465 |
Encoders are good things, and I like them.
DC motors are problematic, even with encoders as the accelleration is difficult to get right.
As far as CNC goes, all of the ones that I've seen (I work with several machine shops) either use high feedback servo style motors, or steppers. Practically all DIY CNC machines use steppers for the same reason that we do.
2D printers do some things a little different, which makes them better suited to high speeds using DC motors:
They only move 1 axis at any given time. The Internal logic is something like this: "Advance the page (Y axis) until it approaches 1 print head's worth of distance. Verify and adjust. This step happens while the print head (X axis) is reversing direction. For the X axis, measure speed, at [lead time] before you get to the point where you need a dot, trigger the print head to send a droplet of ink." Printers NEVER deliver ink on a diagonal path, and because ink is a lot less viscous than melted plastic, it can deliver tiny little droplets which it knows a very precise lead time to hit the surface of the paper, and it can do so in a rapid-fire sequence of droplets, instead of a contiguous stream.
I am not saying that it can't be done, but I am saying that it would take a very specialised control engine to do this, and it would most likely work best if you were to re-write the gcode to allow the printer to move only one axis at a time with fixed steps in the other direction. (We already do this to limit movement on the Z axis.) I think that the extruder would need to be fine-tuned to be able to deliver very precise amounts of material as well.
As is, with the stepper motors, the print head can be moved in a very defined way to have a "line" of material extruded at almost any X/Y ratio. With DC motors, you can approximate this with PWM control, but it would take a lot of R&D time to measure acceleration rates and calibration time to get this working, even if you only allow movement on the 90 degree planes and 45 degree angles, particularly since movement on the Y axis will vary in available acceleration because of the increasing mass due to the project being built on it over time. By comparison, the mass of a sheet of paper printed vs unprinted does not change much and is still rarely a significant portion of the moving mass of the paper feeding rollers and motors, whereas a 40% fill of ABS plastic in an object up to 150mm cubed probably DOES weigh in at a significant amount as compared to the print bed motors and belt of a typical RapRep.
So these are the hurdles that I can foresee you needing to overcome to make this work. I you combine the opto-encoders and use PWM output to the DC motors then you should be able to get enough accuracy to be able to get reasonable results. With enough R&D work, you might even get excellent results, with such things as the ability to pause/resume which could come in very handy for such things as multi-colour printing. You will also need other control electronics so that you can deal with the encoders, switch polarities as well as deal with the PWM output in order to get the control that you need. These are basically a handful of power transistors, which shouldn't cost much.
If you are working for $0/hour, and you have adequate electronics available to you that you can get this all done, it may be worthwhile.
By comparison though, I just bought a set of 5 76 oz-in stepper motors off of eBay for $37. Even if I were to value my own time at 1/2 minimum wage, I'm pretty sure that I'd come out ahead from this deal when compared to the development time needed to make the DC motors work okay.
Once the 3D printer is working, I'd print a couple of RC car chassis and use the free DC motors in those instead, but that's me.
DC motors are problematic, even with encoders as the accelleration is difficult to get right.
As far as CNC goes, all of the ones that I've seen (I work with several machine shops) either use high feedback servo style motors, or steppers. Practically all DIY CNC machines use steppers for the same reason that we do.
2D printers do some things a little different, which makes them better suited to high speeds using DC motors:
They only move 1 axis at any given time. The Internal logic is something like this: "Advance the page (Y axis) until it approaches 1 print head's worth of distance. Verify and adjust. This step happens while the print head (X axis) is reversing direction. For the X axis, measure speed, at [lead time] before you get to the point where you need a dot, trigger the print head to send a droplet of ink." Printers NEVER deliver ink on a diagonal path, and because ink is a lot less viscous than melted plastic, it can deliver tiny little droplets which it knows a very precise lead time to hit the surface of the paper, and it can do so in a rapid-fire sequence of droplets, instead of a contiguous stream.
I am not saying that it can't be done, but I am saying that it would take a very specialised control engine to do this, and it would most likely work best if you were to re-write the gcode to allow the printer to move only one axis at a time with fixed steps in the other direction. (We already do this to limit movement on the Z axis.) I think that the extruder would need to be fine-tuned to be able to deliver very precise amounts of material as well.
As is, with the stepper motors, the print head can be moved in a very defined way to have a "line" of material extruded at almost any X/Y ratio. With DC motors, you can approximate this with PWM control, but it would take a lot of R&D time to measure acceleration rates and calibration time to get this working, even if you only allow movement on the 90 degree planes and 45 degree angles, particularly since movement on the Y axis will vary in available acceleration because of the increasing mass due to the project being built on it over time. By comparison, the mass of a sheet of paper printed vs unprinted does not change much and is still rarely a significant portion of the moving mass of the paper feeding rollers and motors, whereas a 40% fill of ABS plastic in an object up to 150mm cubed probably DOES weigh in at a significant amount as compared to the print bed motors and belt of a typical RapRep.
So these are the hurdles that I can foresee you needing to overcome to make this work. I you combine the opto-encoders and use PWM output to the DC motors then you should be able to get enough accuracy to be able to get reasonable results. With enough R&D work, you might even get excellent results, with such things as the ability to pause/resume which could come in very handy for such things as multi-colour printing. You will also need other control electronics so that you can deal with the encoders, switch polarities as well as deal with the PWM output in order to get the control that you need. These are basically a handful of power transistors, which shouldn't cost much.
If you are working for $0/hour, and you have adequate electronics available to you that you can get this all done, it may be worthwhile.
By comparison though, I just bought a set of 5 76 oz-in stepper motors off of eBay for $37. Even if I were to value my own time at 1/2 minimum wage, I'm pretty sure that I'd come out ahead from this deal when compared to the development time needed to make the DC motors work okay.
Once the 3D printer is working, I'd print a couple of RC car chassis and use the free DC motors in those instead, but that's me.
|
Re: RepRap using DC Motors! December 14, 2014 07:43AM |
Registered: 10 years ago Posts: 137 |
[www.kickstarter.com]
Prusa i3 R2 + The Shell - Saintsmart Ramps 1.4 - Mega2560 R3 - Driver A4988 - Firmware MarlinKimbra
Mini Kossel - Alligator - Firmware MarlinKimbra4due
Prusa i3 R2 + The Shell - Saintsmart Ramps 1.4 - Mega2560 R3 - Driver A4988 - Firmware MarlinKimbra
Mini Kossel - Alligator - Firmware MarlinKimbra4due
|
Re: RepRap using DC Motors! March 06, 2015 11:10AM |
Registered: 9 years ago Posts: 221 |
I hope that the discussion could go on, so we all learn more.
I am like many of here, trying things and gaining know how.
If cost was not taking into consideration, how could I get the motor to work in a 3 D printer?
Definitely controller is a must, but what type to f controller?
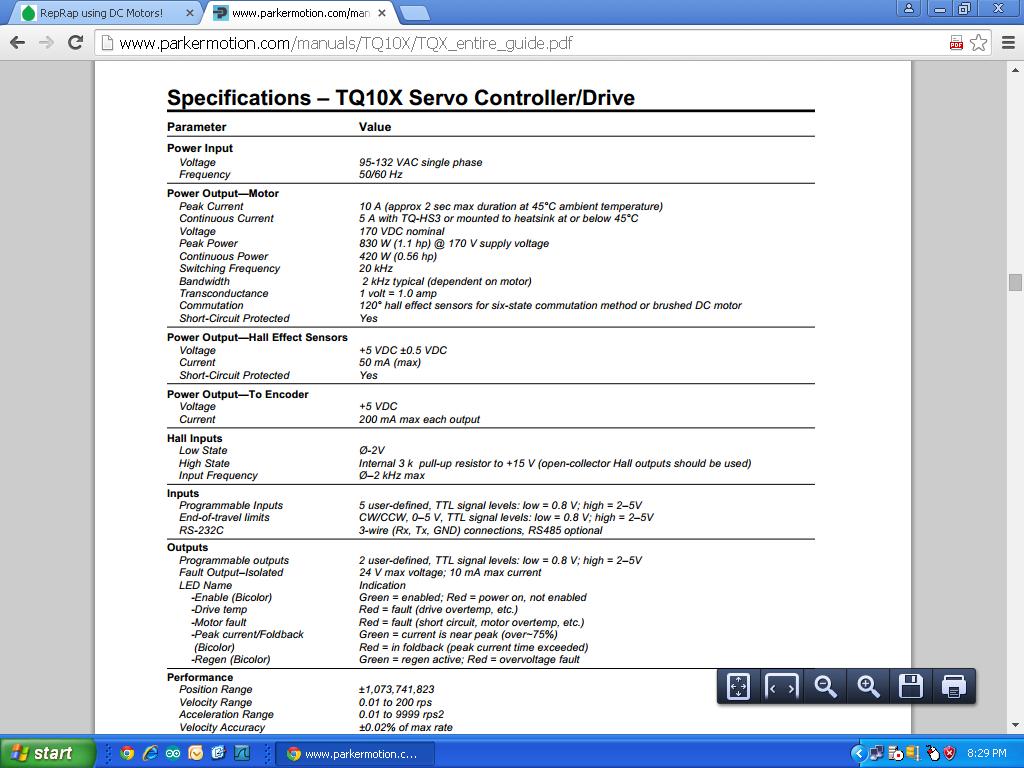
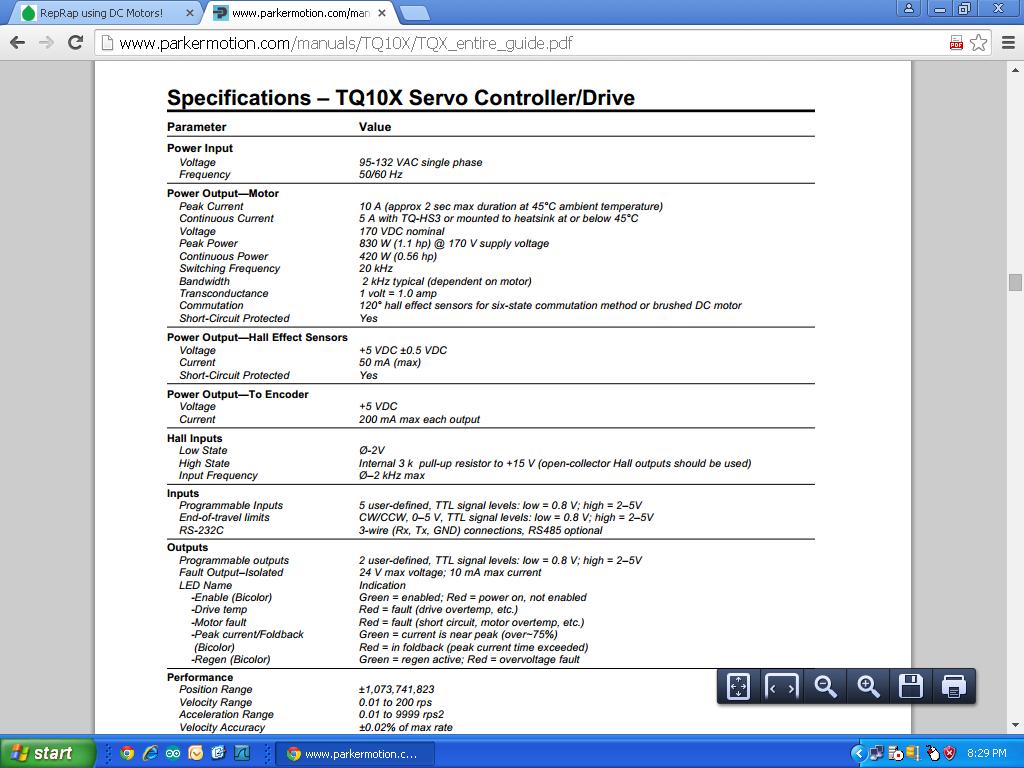
I do have used salvaged Parker's compumotors TQ10s that would give me the controlling power to each axis' servo motor but
how to if possible,
To connect arduino with marlin firmware ?
Or it should run a proper key software from a PC under X code to run them?
It all seems that in order to run a bigger Servomotor - to have the torque, speed to handle
the stress on the x axis, it would definitely be running on a separated controller, away from Ramps...?
I hope, really really, that members could bring up more of their experiences, so we all benefit from the colective know how!
Thanks!
Bob
Edited 1 time(s). Last edit at 03/08/2015 12:35AM by Bobyni.
I am like many of here, trying things and gaining know how.
If cost was not taking into consideration, how could I get the motor to work in a 3 D printer?
Definitely controller is a must, but what type to f controller?
I do have used salvaged Parker's compumotors TQ10s that would give me the controlling power to each axis' servo motor but
how to if possible,
To connect arduino with marlin firmware ?
Or it should run a proper key software from a PC under X code to run them?
It all seems that in order to run a bigger Servomotor - to have the torque, speed to handle
the stress on the x axis, it would definitely be running on a separated controller, away from Ramps...?
I hope, really really, that members could bring up more of their experiences, so we all benefit from the colective know how!
Thanks!
Bob
Edited 1 time(s). Last edit at 03/08/2015 12:35AM by Bobyni.
|
Re: RepRap using DC Motors! March 06, 2015 12:59PM |
Admin Registered: 16 years ago Posts: 13,889 |
... if your servo-drivers has STEP and DIR inputs and accepts TTL levels with <20mA, then any of the common STEP/DIR controllers can be used.
I've replaced comercial controller boards with the older Gen3 or (then) more modern ArduinoMega/RAMPS 1.2 without any problems by simply connecting the corresponding pins of the controllers and the drivers.
On the other side I've replaced the small POLOLU-drivers by comercial high quality drivers simply by wiring the pins to a small replacement board, resembling the POLOLU-style pins, which I've then inserted in the sockets ...
Viktor
--------
Aufruf zum Projekt "Müll-freie Meere" - [reprap.org] -- Deutsche Facebook-Gruppe - [www.facebook.com]
Call for the project "garbage-free seas" - [reprap.org]
I've replaced comercial controller boards with the older Gen3 or (then) more modern ArduinoMega/RAMPS 1.2 without any problems by simply connecting the corresponding pins of the controllers and the drivers.
On the other side I've replaced the small POLOLU-drivers by comercial high quality drivers simply by wiring the pins to a small replacement board, resembling the POLOLU-style pins, which I've then inserted in the sockets ...
Viktor
--------
Aufruf zum Projekt "Müll-freie Meere" - [reprap.org] -- Deutsche Facebook-Gruppe - [www.facebook.com]
Call for the project "garbage-free seas" - [reprap.org]
|
Re: RepRap using DC Motors! March 08, 2015 12:45AM |
Registered: 9 years ago Posts: 221 |
|
Re: RepRap using DC Motors! March 08, 2015 06:17PM |
Admin Registered: 16 years ago Posts: 13,889 |
... hmmm ... the driving info is missing - either it's only controllable per serial communication, or you can reconfigure the inputs to special functions.
Have you some information regarding driving the controller with STEP/DIR or CW/CCW pulses?
Viktor
--------
Aufruf zum Projekt "Müll-freie Meere" - [reprap.org] -- Deutsche Facebook-Gruppe - [www.facebook.com]
Call for the project "garbage-free seas" - [reprap.org]
Have you some information regarding driving the controller with STEP/DIR or CW/CCW pulses?
Viktor
--------
Aufruf zum Projekt "Müll-freie Meere" - [reprap.org] -- Deutsche Facebook-Gruppe - [www.facebook.com]
Call for the project "garbage-free seas" - [reprap.org]
|
Re: RepRap using DC Motors! March 08, 2015 10:53PM |
Registered: 9 years ago Posts: 221 |
hi Viktor,
no , this Tq10X model does not have the step/dir or cw/ccw pulse information.
the other model has it: TQ10SD.(but I don't have it)
on the spec of the TQ10X it says it has 5 user define programmable input using TTL signal level......
I believe this is where it can be programmed to be identified for different axis.
PLS see attached spec screen shoot.
I am lacking of software skill and Electronic is just something that I am picking up now, so not an expert at all this this territory.
but very willing to learn!!!!
Thanks a lot!!!
Edited 1 time(s). Last edit at 03/08/2015 10:54PM by Bobyni.
no , this Tq10X model does not have the step/dir or cw/ccw pulse information.
the other model has it: TQ10SD.(but I don't have it)
on the spec of the TQ10X it says it has 5 user define programmable input using TTL signal level......
I believe this is where it can be programmed to be identified for different axis.
PLS see attached spec screen shoot.
I am lacking of software skill and Electronic is just something that I am picking up now, so not an expert at all this this territory.
but very willing to learn!!!!
Thanks a lot!!!
Edited 1 time(s). Last edit at 03/08/2015 10:54PM by Bobyni.
|
Re: RepRap using DC Motors! March 09, 2015 05:04AM |
Registered: 12 years ago Posts: 972 |
I have tested the motors from what I gather is Ricoh's Smart Position Motor System: [www.ricoh.com] that can be found on eBay and Aliexpress (google for 20w brushless encoder). But I have not yet being able to obtain a datasheet (help me out here if you can).
These are brushless motors with built-in power driver and encoder that can be controlled from three digital outputs (PWM/direction/brake). Quadrature encoder is only 100 lines which means a maximum of 400 counts per revolution. Output shaft is 6mm and the only potential drawback is the shaft lock protection (that will disable the motor if motor is not hitting an internal hall sensor while consuming max current for a while). I could not get a reliable stall torque measurement because of thatm, but the stall torque is definitely much higher than 5kg cm.
Tests for moving the carriages of my Prusa i3 shown there is much spare power to do the job (my guess is that even a direct drive extruder will go fine, but I have not yet tested it). While I have tested other motors and proved successful too ( [www.youmagine.com] ) these latter motors do simplify the drive electronics and are almost affordable (~$15 each). Even if you throw an Arduino Pro Mini for controlling each one, that's only a bit more than one buck each.
Edited 1 time(s). Last edit at 03/09/2015 05:04AM by misan.
These are brushless motors with built-in power driver and encoder that can be controlled from three digital outputs (PWM/direction/brake). Quadrature encoder is only 100 lines which means a maximum of 400 counts per revolution. Output shaft is 6mm and the only potential drawback is the shaft lock protection (that will disable the motor if motor is not hitting an internal hall sensor while consuming max current for a while). I could not get a reliable stall torque measurement because of thatm, but the stall torque is definitely much higher than 5kg cm.
Tests for moving the carriages of my Prusa i3 shown there is much spare power to do the job (my guess is that even a direct drive extruder will go fine, but I have not yet tested it). While I have tested other motors and proved successful too ( [www.youmagine.com] ) these latter motors do simplify the drive electronics and are almost affordable (~$15 each). Even if you throw an Arduino Pro Mini for controlling each one, that's only a bit more than one buck each.
Edited 1 time(s). Last edit at 03/09/2015 05:04AM by misan.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
Sorry, only registered users may post in this forum.