Home
>
RepRap User Groups
>
Europe
>
Italy RepRap User Group - Gruppo RepRap Italia
>
Discussioni generali - NO PROBLEMI DELLA STAMPANTE
>
Topic
>
Page 2
[RISOLTO] Costruzione Prusa i3 e alcune delucidazioni.
Posted by momolo
|
Re: Costruzione Prusa i3 e alcune delucidazioni. March 31, 2014 07:06AM |
Registered: 10 years ago Posts: 74 |
Intendi questo: http://it.wikipedia.org/wiki/Strappo_(meccanica)
Comunque avresti altri dati che potrei verificare? Feedrate, varie Speed e accelerazioni? Nel firmware ce ne sono diverse...non vorrei che fossero di default un po' troppo alte....grazie
Edited 4 time(s). Last edit at 03/31/2014 01:01PM by momolo.
Comunque avresti altri dati che potrei verificare? Feedrate, varie Speed e accelerazioni? Nel firmware ce ne sono diverse...non vorrei che fossero di default un po' troppo alte....grazie
Edited 4 time(s). Last edit at 03/31/2014 01:01PM by momolo.
|
Re: Costruzione Prusa i3 e alcune delucidazioni. March 31, 2014 06:12PM |
Registered: 10 years ago Posts: 119 |
|
Re: Costruzione Prusa i3 e alcune delucidazioni. April 01, 2014 07:44AM |
Registered: 10 years ago Posts: 74 |
|
Re: Costruzione Prusa i3 e alcune delucidazioni. April 01, 2014 02:06PM |
Registered: 10 years ago Posts: 119 |
Tutti i miei valori sono tendenzialmente bassi, ho preferito essere prudente. E da quando ho forzato via Slic3r le accelerazioni a 800 la qualità è salita molto.
puoi alzare la massima velocità X e Y da 50 mm/sec a 200/250 mmsec
la velocità di Z (terzo parametro) è molto conservativa, la mia è a 2.3 prima era a 5
Velocità dell'estrusore mi sembra adeguata
#define _MAX_FEEDRATE {250, 250, 2, 45}
//-----------------------------------------------------------------------
//// Acceleration settings
//-----------------------------------------------------------------------
// X, Y, Z, E maximum start speed for accelerated moves. E default values are good for skeinforge 40+, for older versions raise them a lot.
#define _ACCELERATION 1000 // Axis Normal acceleration mm/s^2 // OK
#define _RETRACT_ACCELERATION 2000 // Extruder Normal acceleration mm/s^2 // OK
#define _MAX_XY_JERK 10.0 // L'ho ridotto a 5.0 meno strappi
#define _MAX_Z_JERK 0.4 // L'ho ridotto a 0.2
#define _MAX_E_JERK 5.0 // il mio è 6.0
//#define _MAX_START_SPEED_UNITS_PER_SECOND {25.0,25.0,0.2,10.0}
#define _MAX_ACCELERATION_UNITS_PER_SQ_SECOND {2500,2500,45,2000} // metti 1500,1500,100,2000 // X, Y, Z and E max acceleration in mm/s^2 for printing moves or retracts
L'ultimo valore, l'accelerazione dell'estrusore, dipende da che modello hai. Con il mio wade ho messo 5000 e non fa una piega. Puoi correggere anche RETRACT_ACCELERATION
Fammi sapere come va,
Ciao
ps.: grazie della definizione di jerk da wikipedia, non mi era mai venuto in mente di cercarla li
Edited 1 time(s). Last edit at 04/01/2014 02:07PM by Stefano.Gottardi.
Stefano
Prusa i3 boxed, RRD Taurino Classic Arduino Mega2560R3, Ramps 1.4, Hot-end IeC 0,35, end-stop Hall-O
puoi alzare la massima velocità X e Y da 50 mm/sec a 200/250 mmsec
la velocità di Z (terzo parametro) è molto conservativa, la mia è a 2.3 prima era a 5
Velocità dell'estrusore mi sembra adeguata
#define _MAX_FEEDRATE {250, 250, 2, 45}
//-----------------------------------------------------------------------
//// Acceleration settings
//-----------------------------------------------------------------------
// X, Y, Z, E maximum start speed for accelerated moves. E default values are good for skeinforge 40+, for older versions raise them a lot.
#define _ACCELERATION 1000 // Axis Normal acceleration mm/s^2 // OK
#define _RETRACT_ACCELERATION 2000 // Extruder Normal acceleration mm/s^2 // OK
#define _MAX_XY_JERK 10.0 // L'ho ridotto a 5.0 meno strappi
#define _MAX_Z_JERK 0.4 // L'ho ridotto a 0.2
#define _MAX_E_JERK 5.0 // il mio è 6.0
//#define _MAX_START_SPEED_UNITS_PER_SECOND {25.0,25.0,0.2,10.0}
#define _MAX_ACCELERATION_UNITS_PER_SQ_SECOND {2500,2500,45,2000} // metti 1500,1500,100,2000 // X, Y, Z and E max acceleration in mm/s^2 for printing moves or retracts
L'ultimo valore, l'accelerazione dell'estrusore, dipende da che modello hai. Con il mio wade ho messo 5000 e non fa una piega. Puoi correggere anche RETRACT_ACCELERATION
Fammi sapere come va,
Ciao
ps.: grazie della definizione di jerk da wikipedia, non mi era mai venuto in mente di cercarla li
Edited 1 time(s). Last edit at 04/01/2014 02:07PM by Stefano.Gottardi.
Stefano
Prusa i3 boxed, RRD Taurino Classic Arduino Mega2560R3, Ramps 1.4, Hot-end IeC 0,35, end-stop Hall-O
|
Re: Costruzione Prusa i3 e alcune delucidazioni. April 01, 2014 02:51PM |
Registered: 10 years ago Posts: 74 |
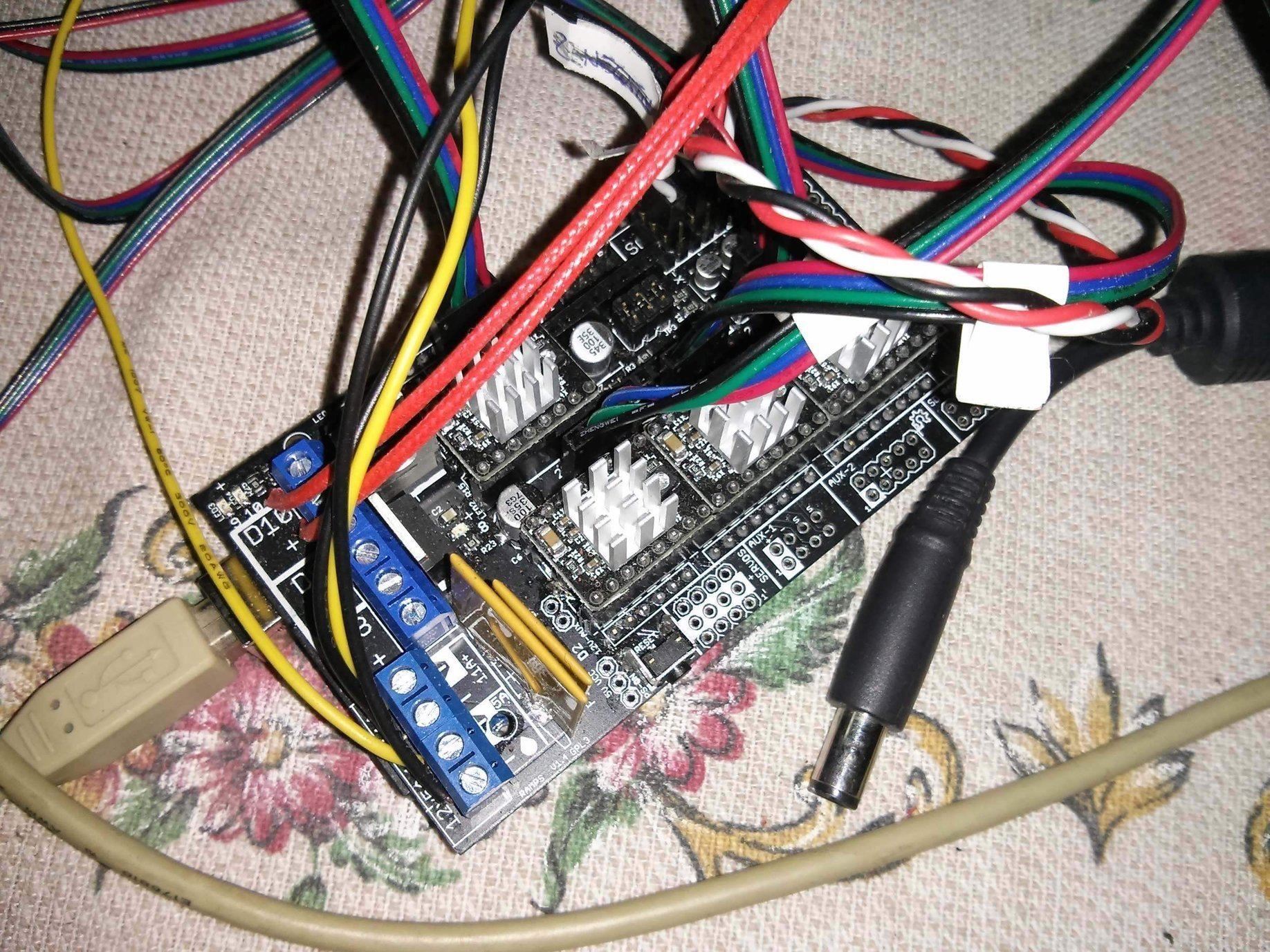
Ti allegò alcune foto della stampante tanto per renderti conto meglio...ora ha l'estrusore un po' smontato comunque è chiaro...facendo delle prove senza ugello il motore a volte si blocca grattando...forse perché il filo è stretto con delle viti non ammortizzate.. Ora vorrei metterle più lunghe con delle molle per accompagnare meglio il filo che dici? Intanto grazie, domani sera spero di provare.
Edited 1 time(s). Last edit at 04/01/2014 02:53PM by momolo.
Edited 1 time(s). Last edit at 04/01/2014 02:53PM by momolo.
|
Accelerazione e Jerk (o Strappo in italiano) April 01, 2014 04:59PM |
Registered: 10 years ago Posts: 132 |
Considerando una velocità V' di movimento di una componente della vostra stampante (lungo l'asse X oppure Y) con Accelerazione si intende la rapidità con la quale il movimento passa da V' a V". Il Jerk o strappo indica la dolcezza con cui viene applicata l'accelerazione.
Questa definizione è pescata da un video di una conferenza di Alessandro Ranellucci del 2012 visibile (a spezzoni) a questi indirizzi (e pubblicati da un utente youtube di nome MrLaudix):
[www.youtube.com] , [www.youtube.com] , [www.youtube.com] ,
[www.youtube.com] , [www.youtube.com] , [www.youtube.com]
Facendo un esempio pratico un po' stiracchiato:
causa vittoria al super enalotto, vi siete comprati una bella Ferrari FF (che almeno ha il bagagliaio capiente) state lasciando un'area di servizio della Autoban a circa 60 km/h; arrivati alla corsia di immissione, premete l’acceleratore fino in fondo.
Risultato l’auto schizza via come un missile e il cambio automatico divora tutti i rapporti portandovi a oltre 300 km/h mentre voi ingoiate le vostre nuove otturazioni in oro........ La accelerazione (da 60 a 300 km/h) è stata quella massima (concessa dal mezzo).
Invece premendo dolcemente l’acceleratore avreste potuto comunque arrivare alla velocità massima senza trovarvi con le budella appiccicate allo schienale.
Tuttavia se la velocità con cui premete l’accelleratore, cioè la velocità con cui il vostro piede passa dalla posizione "pedale sfiorato" alla posizione "pedale a fine corsa" non fosse costante, ma avesse essa stessa una sua accelerazione quel dato potrebbe chiamarsi Jerk (o strappo)
Cioè se impiegaste 4 secondi per passare da "pedale sfiorato" a "pedale a mezza corsa" e solamente 2 secondi per passare da "pedale a mezza corsa" a "pedale a fine corsa", questo vorrebbe dire che il movimento del vostro piede sul pedale del gas ha subito una accelerazione, e tale accelerazione potrebbe definirsi Jerk o Strappo
Mi rendo conto che l'esempio è tirato per i capelli, dato che un'auto non ha una curva di accelerazione rettilinea ma accelera con meno rapidità all'aumentare della sua velocità perché la resistenza dell'aria aumenta con il quadrato della velocità dell'auto, prendetelo come un esempio imperfetto
Questa definizione è pescata da un video di una conferenza di Alessandro Ranellucci del 2012 visibile (a spezzoni) a questi indirizzi (e pubblicati da un utente youtube di nome MrLaudix):
[www.youtube.com] , [www.youtube.com] , [www.youtube.com] ,
[www.youtube.com] , [www.youtube.com] , [www.youtube.com]
Facendo un esempio pratico un po' stiracchiato:
causa vittoria al super enalotto, vi siete comprati una bella Ferrari FF (che almeno ha il bagagliaio capiente) state lasciando un'area di servizio della Autoban a circa 60 km/h; arrivati alla corsia di immissione, premete l’acceleratore fino in fondo.
Risultato l’auto schizza via come un missile e il cambio automatico divora tutti i rapporti portandovi a oltre 300 km/h mentre voi ingoiate le vostre nuove otturazioni in oro........ La accelerazione (da 60 a 300 km/h) è stata quella massima (concessa dal mezzo).
Invece premendo dolcemente l’acceleratore avreste potuto comunque arrivare alla velocità massima senza trovarvi con le budella appiccicate allo schienale.
Tuttavia se la velocità con cui premete l’accelleratore, cioè la velocità con cui il vostro piede passa dalla posizione "pedale sfiorato" alla posizione "pedale a fine corsa" non fosse costante, ma avesse essa stessa una sua accelerazione quel dato potrebbe chiamarsi Jerk (o strappo)
Cioè se impiegaste 4 secondi per passare da "pedale sfiorato" a "pedale a mezza corsa" e solamente 2 secondi per passare da "pedale a mezza corsa" a "pedale a fine corsa", questo vorrebbe dire che il movimento del vostro piede sul pedale del gas ha subito una accelerazione, e tale accelerazione potrebbe definirsi Jerk o Strappo
Mi rendo conto che l'esempio è tirato per i capelli, dato che un'auto non ha una curva di accelerazione rettilinea ma accelera con meno rapidità all'aumentare della sua velocità perché la resistenza dell'aria aumenta con il quadrato della velocità dell'auto, prendetelo come un esempio imperfetto
|
Re: Accelerazione e Jerk (o Strappo in italiano) April 02, 2014 03:36PM |
Registered: 10 years ago Posts: 119 |
Ciao Davide 
Credo che ci sia un pò di confusione tra lo strappo definito da wikipedia Strappo (meccanica) trovato dall'amico momolo e il jerk presente nella configurazione del firmware. Ho usato di proposito il termine italiano e inglese.
Lo strappo, come correttamente scrivevi, è la variazione dell'accelerazione. la sua unità di misura è m/sec3.
Non è facile pensare a qualcosa che si muove accelerando, e che subisce un ulteriore accelerazione, ma l'esempio dell'auto rende l'idea.
Il firmware della stampante non pilota i motori in modo continuo (senza soluzione di continuità, in modo analogico) ma con gradini, nello stesso modo con cui si trasforma un segnale analogico in digitale. Se pensi poi che i nostri motori sono passo-passo, il concetto diviene anche più chiaro.
( fonte [www.elemania.altervista.org] )
Questa immagine, anche se rappresenta il campionamento di una frequenza audio, si presta anche ad essere letta al contrario, i movimenti a scatti di un motore tendono a diventare movimenti contininui della meccanica.
Il software quando applica una varizione di velocità (accelerazione) fa un salto (gradino) istantaneo. Questa variazione non tiene conto dell'inerzia della meccanica, che viene forzata e maltrattata.
Il jerk che è la differenza massima tra i gradini, cioè tra 2 velocità, viene usato per mitigare questo problema. Nei config si può notare che l'unità di misura usata è il m/sec, tipico della velocità e non m/sec3 dello strappo meccanico.
Concludendo, il jerk è uno strappo dettato dalla natura digitale del controllo di movimento.
Spero di aver spiegato in modo chiaro un concetto forse un pò oscuro.
Ciao
Edited 2 time(s). Last edit at 04/02/2014 03:38PM by Stefano.Gottardi.
Stefano
Prusa i3 boxed, RRD Taurino Classic Arduino Mega2560R3, Ramps 1.4, Hot-end IeC 0,35, end-stop Hall-O
Credo che ci sia un pò di confusione tra lo strappo definito da wikipedia Strappo (meccanica) trovato dall'amico momolo e il jerk presente nella configurazione del firmware. Ho usato di proposito il termine italiano e inglese.
Lo strappo, come correttamente scrivevi, è la variazione dell'accelerazione. la sua unità di misura è m/sec3.
Non è facile pensare a qualcosa che si muove accelerando, e che subisce un ulteriore accelerazione, ma l'esempio dell'auto rende l'idea.
Il firmware della stampante non pilota i motori in modo continuo (senza soluzione di continuità, in modo analogico) ma con gradini, nello stesso modo con cui si trasforma un segnale analogico in digitale. Se pensi poi che i nostri motori sono passo-passo, il concetto diviene anche più chiaro.

( fonte [www.elemania.altervista.org] )
Questa immagine, anche se rappresenta il campionamento di una frequenza audio, si presta anche ad essere letta al contrario, i movimenti a scatti di un motore tendono a diventare movimenti contininui della meccanica.
Il software quando applica una varizione di velocità (accelerazione) fa un salto (gradino) istantaneo. Questa variazione non tiene conto dell'inerzia della meccanica, che viene forzata e maltrattata.
Il jerk che è la differenza massima tra i gradini, cioè tra 2 velocità, viene usato per mitigare questo problema. Nei config si può notare che l'unità di misura usata è il m/sec, tipico della velocità e non m/sec3 dello strappo meccanico.
Concludendo, il jerk è uno strappo dettato dalla natura digitale del controllo di movimento.
Spero di aver spiegato in modo chiaro un concetto forse un pò oscuro.
Ciao
Edited 2 time(s). Last edit at 04/02/2014 03:38PM by Stefano.Gottardi.
Stefano
Prusa i3 boxed, RRD Taurino Classic Arduino Mega2560R3, Ramps 1.4, Hot-end IeC 0,35, end-stop Hall-O
|
Aggiornamenti FW e peggioramenti. April 02, 2014 06:07PM |
Registered: 10 years ago Posts: 74 |
Abbiamo avuto dei peggioramenti sull'asse Z, ma non credo sia dovuto ai parametri modificati, sono tutti migliorativi.
Abbiamo anche ridotto l'accelerazione di Z da 100 a 45 com'era in origine.
L'asse Z si blocca inaspettatamente in alcuni punti sia in salita che in discesa dove fino all'altro giorno non si era bloccato.
Le barre filettate girano linearmente ( sono ben centrate e in asse con i motori), ma i si bloccano e non ce la fanno a far girare il tutto.
Che ne dite se aumentiamo al limite la Vref dell'asse Z a 0.8 (0.8 x 2.5 = 2A) ora siamo a 0.7; abbiamo i pololu neri con dissipatori con possibilità di raffreddamento massivo.
Abbiamo provato con Vref a 0.805 e misurato la temperatura del dissipatore con un classico multimetro digitale: facendo muovere Z da home a +100 e poi home e la temperatura oscilla tra 20 e 21°C. Fino a che temperatura possono arrivare i pololu?
Abbiamo notato un movimento fluido e senza inceppamenti spostando l'asse di 10mm alla volta, tende a bloccarsi con movimenti di un solo mm al colpo.
Che valori del firmware modifichiamo prima di dover procedere con un'eventuale modifica strutturale?
Nessuno ha mai pensato di passare alla trasmissione a cinghia dell'asse Z in questa versione della Prusa i3 o si rischia un effetto molla dovuto al peso del carrello e all'allungamento della cinghia stessa sotto carico?
Edited 3 time(s). Last edit at 04/02/2014 06:48PM by momolo.
Abbiamo anche ridotto l'accelerazione di Z da 100 a 45 com'era in origine.
L'asse Z si blocca inaspettatamente in alcuni punti sia in salita che in discesa dove fino all'altro giorno non si era bloccato.
Le barre filettate girano linearmente ( sono ben centrate e in asse con i motori), ma i si bloccano e non ce la fanno a far girare il tutto.
Che ne dite se aumentiamo al limite la Vref dell'asse Z a 0.8 (0.8 x 2.5 = 2A) ora siamo a 0.7; abbiamo i pololu neri con dissipatori con possibilità di raffreddamento massivo.
Abbiamo provato con Vref a 0.805 e misurato la temperatura del dissipatore con un classico multimetro digitale: facendo muovere Z da home a +100 e poi home e la temperatura oscilla tra 20 e 21°C. Fino a che temperatura possono arrivare i pololu?
Abbiamo notato un movimento fluido e senza inceppamenti spostando l'asse di 10mm alla volta, tende a bloccarsi con movimenti di un solo mm al colpo.
Che valori del firmware modifichiamo prima di dover procedere con un'eventuale modifica strutturale?
Nessuno ha mai pensato di passare alla trasmissione a cinghia dell'asse Z in questa versione della Prusa i3 o si rischia un effetto molla dovuto al peso del carrello e all'allungamento della cinghia stessa sotto carico?
//// MOVEMENT SETTINGS
//-----------------------------------------------------------------------
const int NUM_AXIS = 4; // The axis order in all axis related arrays is X, Y, Z, E
#define _MAX_FEEDRATE {250, 250, 2, 45} // (mm/sec)
#define _HOMING_FEEDRATE {1500,1500,120} // (mm/min) !!
#define _AXIS_RELATIVE_MODES {false, false, false, false}
//// Acceleration settings
//-----------------------------------------------------------------------
// X, Y, Z, E maximum start speed for accelerated moves. E default values are good for skeinforge 40+, for older versions raise them a lot.
#define _ACCELERATION 1000 // Axis Normal acceleration mm/s^2
#define _RETRACT_ACCELERATION 2000 // Extruder Normal acceleration mm/s^2
#define _MAX_XY_JERK 5.0
#define _MAX_Z_JERK 0.2
#define _MAX_E_JERK 5.0 // (mm/sec)
//#define _MAX_START_SPEED_UNITS_PER_SECOND {25.0,25.0,0.2,10.0}
#define _MAX_ACCELERATION_UNITS_PER_SQ_SECOND {1500,1500,100,2000} // X, Y, Z and E max acceleration in mm/s^2 for printing moves or retracts
Edited 3 time(s). Last edit at 04/02/2014 06:48PM by momolo.
|
Re: Aggiornamenti FW e peggioramenti. April 03, 2014 03:45AM |
Registered: 10 years ago Posts: 119 |
Scusa Momolo se sarò sintetico, ma scrivo dal telefono.
le barre Z sono ben lubrificate? il dado e la barra essendo entrambe in acciaio tendono a bloccarsi.
Il driver Z pilota 2 motori, la sua Vref deve essere più alta degli altri se no non arriva a muoverli bene. nel pomeriggio cerco i valori.
Se hai i dissipatori sui pololu li puoi pompare tranquillamente, basta che ci punti sopra una ventola, io uso una 9cm regolata a 3/4 della velocità.
La temperatura di 20° è uguale a quella ambiente? vuol dire che non stanno scaldando. per testare la temperatura io uso le dita, se i pololu sono ventilati e sopporto il calore, sono ampiamente dentro i margini.
puoi provare a ridurre da 0.2 a 0.1 Start Speed 3.valore.
infine, ho visto tentativi di modifiche al monumento di Z ma non sono molto popolari
ciao
Stefano
Prusa i3 boxed, RRD Taurino Classic Arduino Mega2560R3, Ramps 1.4, Hot-end IeC 0,35, end-stop Hall-O
le barre Z sono ben lubrificate? il dado e la barra essendo entrambe in acciaio tendono a bloccarsi.
Il driver Z pilota 2 motori, la sua Vref deve essere più alta degli altri se no non arriva a muoverli bene. nel pomeriggio cerco i valori.
Se hai i dissipatori sui pololu li puoi pompare tranquillamente, basta che ci punti sopra una ventola, io uso una 9cm regolata a 3/4 della velocità.
La temperatura di 20° è uguale a quella ambiente? vuol dire che non stanno scaldando. per testare la temperatura io uso le dita, se i pololu sono ventilati e sopporto il calore, sono ampiamente dentro i margini.
puoi provare a ridurre da 0.2 a 0.1 Start Speed 3.valore.
infine, ho visto tentativi di modifiche al monumento di Z ma non sono molto popolari
ciao
Stefano
Prusa i3 boxed, RRD Taurino Classic Arduino Mega2560R3, Ramps 1.4, Hot-end IeC 0,35, end-stop Hall-O
|
Re: Accelerazione e Jerk (o Strappo in italiano) April 03, 2014 04:16AM |
Registered: 10 years ago Posts: 74 |
Si le barre vengono continuamente lubrificate...la temperatura dei popoli risulta 2-3°c in più rispetto all'ambientale...la vref regolata è circa il doppio degli altri...e comunque 0.8 dovrebbe essere il limite massimo anche se i motori arrivano a 2.5A...proverò modificare il valore speed.
Edited 1 time(s). Last edit at 04/03/2014 09:03AM by momolo.
//#define _MAX_START_SPEED_UNITS_PER_SECOND {25.0,25.0,0.2,10.0}
Se intendi questo mi sembra commentato quindi non considerato nel fw...sbaglio?Edited 1 time(s). Last edit at 04/03/2014 09:03AM by momolo.
|
Re: Accelerazione e Jerk (o Strappo in italiano) April 03, 2014 11:44AM |
Registered: 10 years ago Posts: 119 |
vero è commentato.Quote
momolo
//#define _MAX_START_SPEED_UNITS_PER_SECOND {25.0,25.0,0.2,10.0}Se intendi questo mi sembra commentato quindi non considerato nel fw...sbaglio?
Ho guardato i valori della vref per l'asse Z, 0,8V è un buon valore. Alcuni l'hanno portato fine a 0,9V.
Ho riguardato le ultime foto che hai postato. Che barre stai usando? a me sembrano di allumino, ho visto giusto o è solo la foto?
Stefano
Prusa i3 boxed, RRD Taurino Classic Arduino Mega2560R3, Ramps 1.4, Hot-end IeC 0,35, end-stop Hall-O
|
Re: Costruzione Prusa i3 e alcune delucidazioni. April 03, 2014 12:24PM |
Registered: 10 years ago Posts: 74 |
Si sono in alluminio trafilato e da 10mm per un errore di acquisto cuscinetti... Lo so che durano meno ma per iniziare sono andato al risparmio...e comunque per ora non sono male...ma con 0.9 si supera il valore di 2A max dei pololu...non capisco qual'è il limite allora... la riga del fw devo decommentarla?
A scanso di equivoci ecco i driver presi su reprapwolrd tipo Stepstick A4988 (Discontinued)
Ma mi sono arrivati in versione black da come si vede dalla foto della scheda...quindi le caratteristiche dovrebbero combaciare con questi: [www.pololu.com]
Mi sembra di capire da questo post [forums.reprap.org] che forse si possono regolare con una Vref più alta.
Chi può darmi una spiegazione a tutto ciò?
Grazie
Edited 3 time(s). Last edit at 04/03/2014 02:43PM by momolo.
Prusa i3 frame sgraber metal laser cut , Arduino ATMega2560, Ramps 1.4, Hotend j-head 0.5
A scanso di equivoci ecco i driver presi su reprapwolrd tipo Stepstick A4988 (Discontinued)
Ma mi sono arrivati in versione black da come si vede dalla foto della scheda...quindi le caratteristiche dovrebbero combaciare con questi: [www.pololu.com]
Mi sembra di capire da questo post [forums.reprap.org] che forse si possono regolare con una Vref più alta.
Chi può darmi una spiegazione a tutto ciò?
Grazie
Edited 3 time(s). Last edit at 04/03/2014 02:43PM by momolo.
Prusa i3 frame sgraber metal laser cut , Arduino ATMega2560, Ramps 1.4, Hotend j-head 0.5
|
Re: Costruzione Prusa i3 e alcune delucidazioni. April 03, 2014 04:24PM |
Registered: 10 years ago Posts: 119 |
Il fatto che non sono rettificate potrebbe forse darti problemi di attrito radente, ostacolare la partenza. Per il fatto che durano meno, pazienza. Per assemblare la prossima macchina temporaneamente ho comprato da reprapworld le barre liscie a 4€.Quote
momolo
Si sono in alluminio trafilato e da 10mm per un errore di acquisto cuscinetti... Lo so che durano meno ma per iniziare sono andato al risparmio...e comunque per ora non sono male...
Questa versione supporta fina a 1.2A per fase quindi 2.4A in totale, in modo continuo e 2A per fase di picco, 4A in totale. Sono delle bestie di driverQuote
momolo
ma con 0.9 si supera il valore di 2A max dei pololu...non capisco qual'è il limite allora...
A scanso di equivoci ecco i driver presi su reprapwolrd tipo Stepstick A4988 (Discontinued)
Ma mi sono arrivati in versione black da come si vede dalla foto della scheda...quindi le caratteristiche dovrebbero combaciare con questi: [www.pololu.com]
Mi sembra di capire da questo post [forums.reprap.org] che forse si possono regolare con una Vref più alta.

Sulle specifiche si legge anche che la Vref serve per proteggere il motore, è il limitatore di corrente che non lo fa friggere.
Penso che hai un ampio margine e puoi alzare dolcemente la corrente ai tuoi motori Z.
[reprap.org] poco più avanti su questa pagina ci sono delle immagini di pololu realizzate con fotocamera termica. Si nota che le temperature con dissipatore arrivano tranquillamente oltre i 50°. I tuoi sono a 20-21° e sono praticamente freddi.
Come ulteriore controllo controlla la temperatura del motore. Davide IeC suggerisce di tenerli intorno a 40° per farli lavorare bene. E credo che anche li tu abbia ampio margine di manovra.
Io provereiQuote
momolo
la riga del fw devo decommentarla?
 leggendo la descrizione non credo che tu possa fare dei danni.
leggendo la descrizione non credo che tu possa fare dei danni.Ciao
Stefano
Prusa i3 boxed, RRD Taurino Classic Arduino Mega2560R3, Ramps 1.4, Hot-end IeC 0,35, end-stop Hall-O
|
Re: Costruzione Prusa i3 e alcune delucidazioni. April 03, 2014 07:09PM |
Registered: 10 years ago Posts: 74 |
Gli assi XY da quando ho cambiato il telaio non si sono mai bloccati e hanno la Vref a 0.5....in questo caso comunque l'attrito é di tipo volvente visto che sono le sfere dei cuscinetti lineari a scorrere.....I motori sono ghiacciati...bene...tutto questo mi rallegra...
Edited 1 time(s). Last edit at 04/04/2014 12:59PM by momolo.
Prusa i3 frame sgraber metal laser cut , Arduino ATMega2560, Ramps 1.4, Hotend j-head 0.5
Edited 1 time(s). Last edit at 04/04/2014 12:59PM by momolo.
Prusa i3 frame sgraber metal laser cut , Arduino ATMega2560, Ramps 1.4, Hotend j-head 0.5
|
Re: Costruzione Prusa i3 e alcune delucidazioni. April 04, 2014 04:43AM |
Registered: 10 years ago Posts: 119 |
Il problema era proprio la Vref che appena alzata a 0.6 effettivi, quindi Vref=0.6x1.6=0.96 BINGO!!!

Quindi ora questo è il nostro settaggio
Ora dobbiamo risistemare i passi perchè ora non perdendo più passi, quelli impostati nel FW non sono più corretti, comunque non ci credo ancora!!
Ora passeremo ai problemi di stampa!! Qui: Pareri su prime stampe e miglioramenti.
Grazie mille del supporto a tutti!
Edited 4 time(s). Last edit at 04/05/2014 05:59AM by momolo.
Prusa i3 frame sgraber metal laser cut , Arduino ATMega2560, Ramps 1.4, Hotend j-head 0.5
Quindi ora questo è il nostro settaggio
Motore Vref A = Vref / 1.6 Z 0.96 0.6 Y 0.8 0.5 X 0.8 0.5 E 0.8 0.5
Ora dobbiamo risistemare i passi perchè ora non perdendo più passi, quelli impostati nel FW non sono più corretti, comunque non ci credo ancora!!
Ora passeremo ai problemi di stampa!! Qui: Pareri su prime stampe e miglioramenti.
Grazie mille del supporto a tutti!
Edited 4 time(s). Last edit at 04/05/2014 05:59AM by momolo.
Prusa i3 frame sgraber metal laser cut , Arduino ATMega2560, Ramps 1.4, Hotend j-head 0.5
|
Re: Costruzione Prusa i3 e alcune delucidazioni. April 05, 2014 05:43AM |
Registered: 10 years ago Posts: 119 |

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Sorry, you can't reply to this topic. It has been closed.