Artifical Muscles
Posted by zzorn
|
Artifical Muscles October 18, 2007 01:25PM |
Registered: 16 years ago Posts: 34 |
Hello,
I just recently ran across RepRap, looks like a very interesting project!
Regarding the discussion about creating motors with the RepRap,
one futuristic solution for that might be to use artificial muscles
instead of electromagnetic rotating motors.
Some materials contract when a current (or in some cases chemical) is applied
to them. Some of these materials are polymers, and could maybe be deposited
with a 3D printer (I'm no expert in the area thou). Others are composed of
more expensive and difficult to obtain components such as carbon nanotubes.
Artificial muscles still seem to be at the research stage, with no clear winning
technology yet, so it is not probably feasible in the near future, but eventually
it could allow building things like walking robots and many other applications
directly with a 3D printer.
Wikipedia has this to say about shape changing polymers: [en.wikipedia.org]
Here's some instructions for creating artificial muscles,
unfortunately some of the links seem to be dead: [ndeaa.jpl.nasa.gov]
Here's an approach where bucky-ball paste is deposited in 0.25 mm
thickness at room temperature: [www3.interscience.wiley.com]
Quoting from that article:
"Printable electrical devices[1,2] are attractive for the development
of microelectromechanical systems (MEMS) including
sensors, switches, and micromachines. In particular, printable
actuators that can infinitely operate in air at low voltages
would give a breakthrough in the design of miniaturized
mechanical devices. Conjugated polymers can be regarded as
potential materials for the fabrication of such soft actuators."
...
"Herein we report the first dry actuator that can be fabricated
simply through layer-by-layer casting with
I just recently ran across RepRap, looks like a very interesting project!
Regarding the discussion about creating motors with the RepRap,
one futuristic solution for that might be to use artificial muscles
instead of electromagnetic rotating motors.
Some materials contract when a current (or in some cases chemical) is applied
to them. Some of these materials are polymers, and could maybe be deposited
with a 3D printer (I'm no expert in the area thou). Others are composed of
more expensive and difficult to obtain components such as carbon nanotubes.
Artificial muscles still seem to be at the research stage, with no clear winning
technology yet, so it is not probably feasible in the near future, but eventually
it could allow building things like walking robots and many other applications
directly with a 3D printer.
Wikipedia has this to say about shape changing polymers: [en.wikipedia.org]
Here's some instructions for creating artificial muscles,
unfortunately some of the links seem to be dead: [ndeaa.jpl.nasa.gov]
Here's an approach where bucky-ball paste is deposited in 0.25 mm
thickness at room temperature: [www3.interscience.wiley.com]
Quoting from that article:
"Printable electrical devices[1,2] are attractive for the development
of microelectromechanical systems (MEMS) including
sensors, switches, and micromachines. In particular, printable
actuators that can infinitely operate in air at low voltages
would give a breakthrough in the design of miniaturized
mechanical devices. Conjugated polymers can be regarded as
potential materials for the fabrication of such soft actuators."
...
"Herein we report the first dry actuator that can be fabricated
simply through layer-by-layer casting with
|
Re: Artifical Muscles October 21, 2007 02:32PM |
Admin Registered: 16 years ago Posts: 13,891 |
Hi zzorn,
... the simplest moving structure, which can be build by 3D-fabbing, is a pneumatic or hydraulic setup from a highly elastic resin.
Image a 'finger' from elastic silicone with some capilaries in the outer area:
- if i apply pressure to a capilary on one side (and mabe vacuum to the corresponding one on the other side), then the finger would bend away from the pressurized side.
Combine three fingers on a platform and settle this platform on a bigger structure in the same layout, so you have a bendable 'hand' with three 'fingers', which are bending and moving corresponding to the pressure in the right capillaries ...
With more complex inner structures you can make very much sophisticated morphing as twisting, expanding and contracting too ...
As you build the parts in slices, you can output every complexity you wish, so with the right resin there it's no problem to build elastic tentacles or more complex figered hands, which can perform highly sophisticated tasks.
The controlling software isn't so easy then, but with a guy, which is in developing neural-networks, i hope to build a NN-simulator, which would 'learn' the right moves by error-feedback on his own.
When the software is 'trained', then it could be copied and is now from the start capable of moving the same structures with high accuracy.
Or it could 'learn' further to handle mechanical and geometrical changes or misfittings ...
Viktor
... the simplest moving structure, which can be build by 3D-fabbing, is a pneumatic or hydraulic setup from a highly elastic resin.
Image a 'finger' from elastic silicone with some capilaries in the outer area:
- if i apply pressure to a capilary on one side (and mabe vacuum to the corresponding one on the other side), then the finger would bend away from the pressurized side.
Combine three fingers on a platform and settle this platform on a bigger structure in the same layout, so you have a bendable 'hand' with three 'fingers', which are bending and moving corresponding to the pressure in the right capillaries ...
With more complex inner structures you can make very much sophisticated morphing as twisting, expanding and contracting too ...
As you build the parts in slices, you can output every complexity you wish, so with the right resin there it's no problem to build elastic tentacles or more complex figered hands, which can perform highly sophisticated tasks.
The controlling software isn't so easy then, but with a guy, which is in developing neural-networks, i hope to build a NN-simulator, which would 'learn' the right moves by error-feedback on his own.
When the software is 'trained', then it could be copied and is now from the start capable of moving the same structures with high accuracy.
Or it could 'learn' further to handle mechanical and geometrical changes or misfittings ...
Viktor
|
Re: Artifical Muscles October 21, 2007 04:44PM |
Registered: 16 years ago Posts: 34 |
RepRapped pneumatics sounds interesting.
A neural network does indeed sound like the optimal controller for that kind of set up, it just needs some kind of feedback from the fingers (maybe touch sensors along them, should be easy to do with a conductive polymer and elastic cavities).
Still, a pneumatic system needs some way to generate and control pressure.
One simple way to generate the pressure inside a pneumatic system would be to electrically heat water (or some other substance that changes volume with temperature) in a cavity in each of the fingers. That would avoid the need for motors.
Of course, there are some practical problems to overcome first, how to heat the water effectively (would it require too much power?), whether the change in pressure would give enough power to move the finger/actuator, and whether the movement would be fast enough for practical applications (a problem might be how to get the water to cool down again - heating can be done relatively quickly).
While we are on the subject of pressurized water, a RepRapped steam engine could be kind of interesting too .
.
A neural network does indeed sound like the optimal controller for that kind of set up, it just needs some kind of feedback from the fingers (maybe touch sensors along them, should be easy to do with a conductive polymer and elastic cavities).
Still, a pneumatic system needs some way to generate and control pressure.
One simple way to generate the pressure inside a pneumatic system would be to electrically heat water (or some other substance that changes volume with temperature) in a cavity in each of the fingers. That would avoid the need for motors.
Of course, there are some practical problems to overcome first, how to heat the water effectively (would it require too much power?), whether the change in pressure would give enough power to move the finger/actuator, and whether the movement would be fast enough for practical applications (a problem might be how to get the water to cool down again - heating can be done relatively quickly).
While we are on the subject of pressurized water, a RepRapped steam engine could be kind of interesting too
.
|
Re: Artifical Muscles October 21, 2007 05:11PM |
Admin Registered: 16 years ago Posts: 13,891 |
Hi zzorn,
... i would prefer a single oszillating pump and fast switching micro-valves for the capillaries.
When the pump is oszillating, then you have a sinusoidal pressure-curve between max, zero and min.
For rising the pressure in a single capillare the corresponding valve should only open, when the pressure is on max, then it adds pressure in every half period, until max -- for reducing the pressure the valves opens only when the oszillation is on the way to min, and so on ...
So i can define every pressure-level for every capillare with the corresponding valve - for this i need an array of micro-valves, which i apply to the basement of my arm, where the capilaries-outtakes are so arranged, that they fit on the valve-array.
With this concept i have the electrical complexities and 'hardware' in the basement and the elastic structures could be very easy to build and very small and leightweight too!
And with the same hydraulic system i can make every layout or morphing structure - i have only to realign the valves to the right capilaries.
A point more: for sensing and feedback i didn't need sensors in the fingertips - it's enough, if i feed some 'passive' capilaries to external sensors, so i can sense, when the fingertip touchs a solid or the bending forces in the finger itself ...
Viktor
... i would prefer a single oszillating pump and fast switching micro-valves for the capillaries.
When the pump is oszillating, then you have a sinusoidal pressure-curve between max, zero and min.
For rising the pressure in a single capillare the corresponding valve should only open, when the pressure is on max, then it adds pressure in every half period, until max -- for reducing the pressure the valves opens only when the oszillation is on the way to min, and so on ...
So i can define every pressure-level for every capillare with the corresponding valve - for this i need an array of micro-valves, which i apply to the basement of my arm, where the capilaries-outtakes are so arranged, that they fit on the valve-array.
With this concept i have the electrical complexities and 'hardware' in the basement and the elastic structures could be very easy to build and very small and leightweight too!
And with the same hydraulic system i can make every layout or morphing structure - i have only to realign the valves to the right capilaries.
A point more: for sensing and feedback i didn't need sensors in the fingertips - it's enough, if i feed some 'passive' capilaries to external sensors, so i can sense, when the fingertip touchs a solid or the bending forces in the finger itself ...
Viktor
|
Re: Artifical Muscles October 22, 2007 01:58PM |
Registered: 16 years ago Posts: 34 |
Hi Victor,
Oscillating pressure sounds promising, the whole thing could be more or less a closed system then, and placing all the machinery in a central place would be good.
Here's a description on how to create air powered muscles, that are somewhat similar to that idea: [www.imagesco.com] . We could probably replicate much of it using an elastic and stiff polymer, although something fiber-like (bendable, but not elastic) could be needed. The air-muscles use pressures from 30 to 50 PSI, I wonder if RepRapped models could handle that? (depends on how thick we make them I guess).
Universities are using these to build various robots, among others a cricket smaller than 5 cm, with its own built in compressor: [biorobots.cwru.edu] . The compressor looks like a good candidate for RepRapping: [biorobots.cwru.edu]
(Regarding robot locomotion, their wheel-legged robot looks like a very nice design: [biorobots.cwru.edu] )
- zzorn
Oscillating pressure sounds promising, the whole thing could be more or less a closed system then, and placing all the machinery in a central place would be good.
Here's a description on how to create air powered muscles, that are somewhat similar to that idea: [www.imagesco.com] . We could probably replicate much of it using an elastic and stiff polymer, although something fiber-like (bendable, but not elastic) could be needed. The air-muscles use pressures from 30 to 50 PSI, I wonder if RepRapped models could handle that? (depends on how thick we make them I guess).
Universities are using these to build various robots, among others a cricket smaller than 5 cm, with its own built in compressor: [biorobots.cwru.edu] . The compressor looks like a good candidate for RepRapping: [biorobots.cwru.edu]
(Regarding robot locomotion, their wheel-legged robot looks like a very nice design: [biorobots.cwru.edu] )
- zzorn
|
Re: Artifical Muscles October 22, 2007 02:43PM |
Admin Registered: 16 years ago Posts: 13,891 |
Hi zzorn,
... i'm playing around with different concepts - look at the 'bionicle'-robots at my c't-bot-gallery: [www.ctbot.de]
In the past i experimented with many other active structures and methods too, as pzt-actors and -resonance-drives, shape-memory-alloys (e.g. nitinol-bug-bot 'boris'), magnetorheological- and ferrofluids, magnetic-shape-memory-alloys (active NiMnGa-crystals) and other stuff like that ...
With the reprap i hope to come on the way to 'instant-fabbing' and easy converting ideas in hardware, so the time to build highly sophisticated stuff would reduce to some hours, instead of weeks, months or years ...
With this and the neural-network-simulations the path to fast evolving 'bionics' (e.g. 'golem'-project or 'framsticks') is free, so i can test some very interesting ideas on my own
Viktor
... i'm playing around with different concepts - look at the 'bionicle'-robots at my c't-bot-gallery: [www.ctbot.de]
In the past i experimented with many other active structures and methods too, as pzt-actors and -resonance-drives, shape-memory-alloys (e.g. nitinol-bug-bot 'boris'), magnetorheological- and ferrofluids, magnetic-shape-memory-alloys (active NiMnGa-crystals) and other stuff like that ...
With the reprap i hope to come on the way to 'instant-fabbing' and easy converting ideas in hardware, so the time to build highly sophisticated stuff would reduce to some hours, instead of weeks, months or years ...
With this and the neural-network-simulations the path to fast evolving 'bionics' (e.g. 'golem'-project or 'framsticks') is free, so i can test some very interesting ideas on my own
Viktor
|
Re: Artifical Muscles October 22, 2007 03:23PM |
Registered: 16 years ago Posts: 34 |
Hi Victor,
Cool, I'm coming from a software background myself, working on simulated agents and other things for a game project of mine in my spare time. I'm trying to create an open ended game where players and AI agents can build machines to build things in-game, so I find the concept of a self-replicating, robot making real-world machine intriguing.
I think I'll shop around for some silicon tubing and experiment a bit with air-based muscles later this week. I've got an aquarium air pump lying around somewhere, but apparently they can only create around 5 PSI or so.
-- zzorn
Cool, I'm coming from a software background myself, working on simulated agents and other things for a game project of mine in my spare time. I'm trying to create an open ended game where players and AI agents can build machines to build things in-game, so I find the concept of a self-replicating, robot making real-world machine intriguing
.I think I'll shop around for some silicon tubing and experiment a bit with air-based muscles later this week. I've got an aquarium air pump lying around somewhere, but apparently they can only create around 5 PSI or so.
-- zzorn
|
Re: Artifical Muscles October 22, 2007 03:51PM |
Admin Registered: 16 years ago Posts: 13,891 |
Hi zzorn,
... hydraulic structures are much better for reprapping, because fluids are not compressible, and you can activate expanding silicone-tubes with a simple syringe full of water ...
Try to twist some elastic tubes to a kind of helix and fix them with radial orineted strings - if you arrange it feasible and expand the right tubes, the structure can rotate, expand and bend.
With thinning one side of an elastic tube you have single-tube-actuators, so a simple but 'natura' acting 'hand' with five bending fingers could be assembled from five asymetric tubes ...
Viktor
... hydraulic structures are much better for reprapping, because fluids are not compressible, and you can activate expanding silicone-tubes with a simple syringe full of water ...
Try to twist some elastic tubes to a kind of helix and fix them with radial orineted strings - if you arrange it feasible and expand the right tubes, the structure can rotate, expand and bend.
With thinning one side of an elastic tube you have single-tube-actuators, so a simple but 'natura' acting 'hand' with five bending fingers could be assembled from five asymetric tubes ...
Viktor
|
Re: Artifical Muscles October 22, 2007 05:27PM |
Registered: 16 years ago Posts: 622 |
Viktor,
I like the idea of the radial band of tubes being able to move in four dimensions. That's pretty useful in itself for end effectors that don't have to undergo a lot of load. Almost I can see a universal "finger" setup with more versatility than our own. Incorporate some sensory feedback systems and a control algorith (the really hard part!) and you have one heck of a system.
Demented
I like the idea of the radial band of tubes being able to move in four dimensions. That's pretty useful in itself for end effectors that don't have to undergo a lot of load. Almost I can see a universal "finger" setup with more versatility than our own. Incorporate some sensory feedback systems and a control algorith (the really hard part!) and you have one heck of a system.
Demented
|
Re: Artifical Muscles October 22, 2007 09:22PM |
Registered: 16 years ago Posts: 82 |
How hard do y'all think it would be to use the artificial muscles of whatever variety to power a reprap? I should think that with enough feedback loops for determining current position, a pneumatic muscle capable of contraction to 25% would be quite capable of contracting slowly enough to get the precision required. Maybe I don't know what I'm talking about, but with Viktor's linear column style, this just might work. All we need is a good way to make tubes. Both for muscles and for structural pieces.
Ideas?
-Samuel
Ideas?
-Samuel
|
Re: Artifical Muscles October 23, 2007 01:40AM |
Admin Registered: 16 years ago Posts: 13,891 |
... it's not so hard to make a hydraulic reprap - for my tripod-setup i can replace the three linear stages through three big syringes and activate them through three thinner but much longer sysringes, which i'll push with weak linear motors (here: [builders.reprap.org] TylerM tried a similar approach for a Stewart-platform or hexapod in Nov. 2006 ) ...
If, for example, the inner size of the small syringes is a tenth of the big ones, then i need tenfold way on the small ones, but i have tenfold force and accuracy at the big ones!
With an oscillating pump and a valve-array it would be much more comfortable, but the valves could be a bit expensive, until they would be common ...
The heaviest task is the software - with 10:1 sysringes it's easy = you calculate the way tenfold and that's it ...
With cumulating pressure-pulses i need sensors in the structure, what's a bit more tricky (passive capilaries for sensing or so).
For this i'm on Neural-Network-simulation, here i need only the feedback of the positioning-error to let the software 'learn on her own' to control the hydraulics and perform every task, i want ...
Viktor
If, for example, the inner size of the small syringes is a tenth of the big ones, then i need tenfold way on the small ones, but i have tenfold force and accuracy at the big ones!
With an oscillating pump and a valve-array it would be much more comfortable, but the valves could be a bit expensive, until they would be common ...
The heaviest task is the software - with 10:1 sysringes it's easy = you calculate the way tenfold and that's it ...
With cumulating pressure-pulses i need sensors in the structure, what's a bit more tricky (passive capilaries for sensing or so).
For this i'm on Neural-Network-simulation, here i need only the feedback of the positioning-error to let the software 'learn on her own' to control the hydraulics and perform every task, i want ...
Viktor
|
Re: Artifical Muscles October 26, 2007 07:53PM |
Registered: 16 years ago Posts: 34 |
I built some simple air-muscles to test out the idea.
I couldn't find the same materials as in the air-muscle tutorial linked above, so I used fingers from a latex glove for the muscle, and an aquarium air pump to provide the pressure. The muscles did work, and seemed to have a nice bit for force too, considering the low pressures involved.
The full writeup is on my blog: [zzorn.nfshost.com]
I couldn't find the same materials as in the air-muscle tutorial linked above, so I used fingers from a latex glove for the muscle, and an aquarium air pump to provide the pressure. The muscles did work, and seemed to have a nice bit for force too, considering the low pressures involved.

The full writeup is on my blog: [zzorn.nfshost.com]
|
Re: Artifical Muscles October 26, 2007 09:50PM |
Registered: 16 years ago Posts: 82 |
Say, zzorn,
On your blog, you mentioned trying tape in a grid pattern, and the fact that it needs to be braided, with not contact between strands. I think this is because the point of the wire is to provide a material that doesn't care what the diameter of the tube is, but still can't stretch, and thus forces the muscle to contract lengthwise. If left to its own devices, the rubber would just expand outward, as it doesn't have much of a reason to contract. That's why you need the wire. It greatly improves contraction distance.
Personally, I think that, though it may be easier to make a tube out of wire if it's braided, it doesn't have to be. Probably all that is required is that the wires go from one end to the other, are held against the tube at all points, and don't cross. The problem with your tape is probably that you bound extra strips around it in a grid pattern. If you just did strips lengthwise, I think it would probably work. Try that, and tell us how it works.
Also, you should experiment with strip width. Thinner strips constrict expansion less, but are stronger, and less likely to break under force, allowing you to contract the muscle further.
Thanks, and good job with the test, too. Maybe I'll try one with a bicycle pump, as I don't have an aquarium pump.
-Samuel
On your blog, you mentioned trying tape in a grid pattern, and the fact that it needs to be braided, with not contact between strands. I think this is because the point of the wire is to provide a material that doesn't care what the diameter of the tube is, but still can't stretch, and thus forces the muscle to contract lengthwise. If left to its own devices, the rubber would just expand outward, as it doesn't have much of a reason to contract. That's why you need the wire. It greatly improves contraction distance.
Personally, I think that, though it may be easier to make a tube out of wire if it's braided, it doesn't have to be. Probably all that is required is that the wires go from one end to the other, are held against the tube at all points, and don't cross. The problem with your tape is probably that you bound extra strips around it in a grid pattern. If you just did strips lengthwise, I think it would probably work. Try that, and tell us how it works.
Also, you should experiment with strip width. Thinner strips constrict expansion less, but are stronger, and less likely to break under force, allowing you to contract the muscle further.
Thanks, and good job with the test, too. Maybe I'll try one with a bicycle pump, as I don't have an aquarium pump.
-Samuel
|
Re: Artifical Muscles October 27, 2007 02:18AM |
Admin Registered: 16 years ago Posts: 13,891 |
Hi zzorn,
... the idea with the latex-'fingers' is good - as samuel mentioned, you should glue 4 to 8 strings along the sides of the finger, best with gummi-arabicum-glue or with the solvent-glue, you use for bicycle-repairs, because the glue should be elastic too ...
It's the best, you wet the strings with the glue and press them onto the latex, so it could make a firm contact over the complete length properly.
The latex between the strings should stay expandable, because the thing need a bit radial stretching, to perform a smooth balloon-shape ...
Viktor
... the idea with the latex-'fingers' is good - as samuel mentioned, you should glue 4 to 8 strings along the sides of the finger, best with gummi-arabicum-glue or with the solvent-glue, you use for bicycle-repairs, because the glue should be elastic too ...
It's the best, you wet the strings with the glue and press them onto the latex, so it could make a firm contact over the complete length properly.
The latex between the strings should stay expandable, because the thing need a bit radial stretching, to perform a smooth balloon-shape ...
Viktor
|
Re: Artifical Muscles October 27, 2007 05:53AM |
Registered: 16 years ago Posts: 34 |
Thanks for the comments,
Good point about the strings - indeed, if they connect both endpoints, they should both give the muscle a maximum extension (length of the strings), stopping it from being extended past its breaking point, and pull the both endpoints towards each other as the muscle is inflated.
One advantage that a braided tube has is that it completely surrounds the muscle, giving it a maximum inflation size, and preventing it from breaking if it is filled with air for too long. But we can probably solve that in some way with a reprapped muscle.
I'll give the string idea a try.
Good point about the strings - indeed, if they connect both endpoints, they should both give the muscle a maximum extension (length of the strings), stopping it from being extended past its breaking point, and pull the both endpoints towards each other as the muscle is inflated.
One advantage that a braided tube has is that it completely surrounds the muscle, giving it a maximum inflation size, and preventing it from breaking if it is filled with air for too long. But we can probably solve that in some way with a reprapped muscle.
I'll give the string idea a try.
|
Re: Artifical Muscles October 27, 2007 02:12PM |
Admin Registered: 16 years ago Posts: 13,891 |
Hi zzorn,
... you can reprap hoses with inserted strings, when you manually inlay the strings during the fabbing process ...
Another pneumatic muscle without strings is like a bicycle-hose - without pressure you can stretch it to full length, but when you apply pressure, it morphs to the ring-form (or other endforms with more displacement) and contracts with some force ...
But this muscles are not linear and needs a coninuous position-feedback for precise moving.
For other ideas with syringes and pistons i appended some images:
- in 'Pneumatic-muscle1.jpg' i have a setup with two-fold displacemet ...
- in 'Hydraulic-muscle1.jpg' i connected a bellow-coupling to a syringe - with 'blowing up' the bellow-coupling expands only linear ...
- in 'Hydraulic gearbox1.jpg' i connected a thin sysringe with a bigger one - when moving the piston of the small one, the big one is moving only a tenth of the way, but with tenfold force, as the pressure/force acts in relation of the piston-diameters ...
Viktor
... you can reprap hoses with inserted strings, when you manually inlay the strings during the fabbing process ...
Another pneumatic muscle without strings is like a bicycle-hose - without pressure you can stretch it to full length, but when you apply pressure, it morphs to the ring-form (or other endforms with more displacement) and contracts with some force ...
But this muscles are not linear and needs a coninuous position-feedback for precise moving.
For other ideas with syringes and pistons i appended some images:
- in 'Pneumatic-muscle1.jpg' i have a setup with two-fold displacemet ...
- in 'Hydraulic-muscle1.jpg' i connected a bellow-coupling to a syringe - with 'blowing up' the bellow-coupling expands only linear ...
- in 'Hydraulic gearbox1.jpg' i connected a thin sysringe with a bigger one - when moving the piston of the small one, the big one is moving only a tenth of the way, but with tenfold force, as the pressure/force acts in relation of the piston-diameters ...
Viktor
|
Re: Artifical Muscles October 27, 2007 02:38PM |
Registered: 16 years ago Posts: 82 |
Viktor,
How hard do you think it would be to take one of your syringes and make it into a solenoid, so that the more current you apply the greater the pressure, and the more contracted the muscle? Would it work? Or is there a better way, such as just using a motor to pump liquid instead. I should think that getting the reprap to only require simply wound solenoids would be better, and more reprapable, but that depends on whether or not they could work.
zzorn: About the string; make sure when/if you glue it on that the glue doesn't spread too far, or it could constrict radial expansion.
-Samuel
How hard do you think it would be to take one of your syringes and make it into a solenoid, so that the more current you apply the greater the pressure, and the more contracted the muscle? Would it work? Or is there a better way, such as just using a motor to pump liquid instead. I should think that getting the reprap to only require simply wound solenoids would be better, and more reprapable, but that depends on whether or not they could work.
zzorn: About the string; make sure when/if you glue it on that the glue doesn't spread too far, or it could constrict radial expansion.
-Samuel
|
Re: Artifical Muscles October 27, 2007 03:00PM |
Admin Registered: 16 years ago Posts: 13,891 |
Hi Samuel,
... i used the syringes only to apply pressure for demostration - in a 'real' setup there should be much more 'muscles' (with attached magnetic/solenoid valves each), and the syringe would be driven oszillating as central pump by a motor with excenter ...
For solenoids you can salvage old solenoid-relays (?) or electromechanic switches, the use often 12 or 24 Volts and can perform high magnetic forces.
For driving a syringe linear with a solenoid it must have a very big travel, what's not so easy, so a motor (e.g. a linear stepper, as in the fab@home-syringe-extruder) would be better.
Another idea is a very big 'electromechanic switch' with a big gap and high contracting force, which would compress a small bulb of elastic resin - then i'll have a kind of 'micro-pulser'
Viktor
... i used the syringes only to apply pressure for demostration - in a 'real' setup there should be much more 'muscles' (with attached magnetic/solenoid valves each), and the syringe would be driven oszillating as central pump by a motor with excenter ...
For solenoids you can salvage old solenoid-relays (?) or electromechanic switches, the use often 12 or 24 Volts and can perform high magnetic forces.
For driving a syringe linear with a solenoid it must have a very big travel, what's not so easy, so a motor (e.g. a linear stepper, as in the fab@home-syringe-extruder) would be better.
Another idea is a very big 'electromechanic switch' with a big gap and high contracting force, which would compress a small bulb of elastic resin - then i'll have a kind of 'micro-pulser'
Viktor
|
Re: Artifical Muscles October 27, 2007 03:29PM |
Registered: 16 years ago Posts: 82 |
Hi Viktor,
Hmm.. I see your point. Maybe a pump could be made by using a piston to pump through a small one-way valve such as the ball and cage valve I mentioned earlier, or a flap valve. The solenoid would oscillate back and forth using a spring to pull in one direction and electricity to pull in the other. When it pushes out, the valve would allow the liquid through. When it pull back, because the valve closes, the pump would pull more liquid in from a source, such as either a tank, or the other side of the system.
Artificial heart valves seem like a good place to look for ideas, as they are designed to quickly change with decent pressure and very little "regurgitation." Of course, some are over-engineered for this situation, because the have to last a _long_ time, and have to stand up to various challenges in the bloodstream.
Maybe a simply wound solenoid isn't going to cut it, though, and I just need to give up.
-Samuel
Hmm.. I see your point. Maybe a pump could be made by using a piston to pump through a small one-way valve such as the ball and cage valve I mentioned earlier, or a flap valve. The solenoid would oscillate back and forth using a spring to pull in one direction and electricity to pull in the other. When it pushes out, the valve would allow the liquid through. When it pull back, because the valve closes, the pump would pull more liquid in from a source, such as either a tank, or the other side of the system.
Artificial heart valves seem like a good place to look for ideas, as they are designed to quickly change with decent pressure and very little "regurgitation." Of course, some are over-engineered for this situation, because the have to last a _long_ time, and have to stand up to various challenges in the bloodstream.
Maybe a simply wound solenoid isn't going to cut it, though, and I just need to give up.
-Samuel
|
Re: Artifical Muscles October 27, 2007 03:46PM |
Admin Registered: 16 years ago Posts: 13,891 |
Hi Samuel,
... look on my 'two-way-valve' in the other thread - here i can stop the flow properly in both directions ...
From the 'Fischer-Technik'-plastics-toys i have very small one-way-valves (heart-like ) and manually driven pneumatic 3-way-switches, which could also be mechanically activated/switched by a solenoid.
Instead of a sphere there could be a moving bar or a bending membrane, which opens or closes holes on both sides, so it should be possible to control pressure in static or pulsed mode with reprapped structures ...
Viktor
... look on my 'two-way-valve' in the other thread - here i can stop the flow properly in both directions ...
From the 'Fischer-Technik'-plastics-toys i have very small one-way-valves (heart-like
) and manually driven pneumatic 3-way-switches, which could also be mechanically activated/switched by a solenoid.Instead of a sphere there could be a moving bar or a bending membrane, which opens or closes holes on both sides, so it should be possible to control pressure in static or pulsed mode with reprapped structures ...
Viktor
|
Re: Artifical Muscles October 27, 2007 04:05PM |
Registered: 16 years ago Posts: 82 |
Hi Viktor,
I was thinking of using a one-way valve so that it could passively allow the pump to work, instead of having a computer apply power to both the pump solenoid and the valve solenoid at the same time. It seemed like a good way to make a simple pump, since it would only require one coil, a spring, and a simple one way valve.
Maybe your two-way valve would work better, but I don't see how.
-Samuel
Some reason it seems as if its nearly just the two of us talking here. I hope I'm not distracting you too much from work.
I was thinking of using a one-way valve so that it could passively allow the pump to work, instead of having a computer apply power to both the pump solenoid and the valve solenoid at the same time. It seemed like a good way to make a simple pump, since it would only require one coil, a spring, and a simple one way valve.
Maybe your two-way valve would work better, but I don't see how.
-Samuel
Some reason it seems as if its nearly just the two of us talking here. I hope I'm not distracting you too much from work.
|
Re: Artifical Muscles October 27, 2007 04:17PM |
Admin Registered: 16 years ago Posts: 13,891 |
Hi Samuel,
... for me it's after 10:00 PM on Saturday night, it isn't much to work and i'm a sort of on the way in my bed
It seems, we're on a side-way from the normal talk, so it's not so much folks involved - and the 'core-team' isn't at home now, to moderate or place comments ...
Bye and good night,
Viktor
... for me it's after 10:00 PM on Saturday night, it isn't much to work and i'm a sort of on the way in my bed
It seems, we're on a side-way from the normal talk, so it's not so much folks involved - and the 'core-team' isn't at home now, to moderate or place comments ...
Bye and good night,
Viktor
|
Re: Artifical Muscles October 28, 2007 05:11PM |
Registered: 16 years ago Posts: 82 |
Viktor,
What do you think would be the best way to make a simple hydraulic pump? Would you use some kind of oscillating solenoid, or just buy a cheap dc motor and reprap a rotary pump?
My original idea had been to make an oscillating solenoid connected to a piston, and two one way valves on the input and output, to prevent back flow. Unfortunately, there would be periods once per cycle where the pressure would be zero, unless we had elastic tubing that stretched each time the pump compressed. Wow, this is starting to sound a lot like the human circulatory system.
Any better ideas?
-Samuel
What do you think would be the best way to make a simple hydraulic pump? Would you use some kind of oscillating solenoid, or just buy a cheap dc motor and reprap a rotary pump?
My original idea had been to make an oscillating solenoid connected to a piston, and two one way valves on the input and output, to prevent back flow. Unfortunately, there would be periods once per cycle where the pressure would be zero, unless we had elastic tubing that stretched each time the pump compressed. Wow, this is starting to sound a lot like the human circulatory system.
Any better ideas?
-Samuel
|
Re: Artifical Muscles October 28, 2007 06:02PM |
Admin Registered: 16 years ago Posts: 13,891 |
Hi Samuel,
... an dc-motor with an excenter ist the simplest way for an oszillating pump with variable sinusoidal output and precise pressure-curves over the period.
Maybe two separate (normal) pumps for static pressure and vacuum with tanks for charging and damping would be a try too for pneumatics, then you need two valves per muscle, but can act every muscle in asynchronous mode ...
For a hydraulic system you need a membrane-damper, to reduce sharp pressure-pulses, which could brake the tubes.
An interesting approach would be a setup of peristaltic pumps and valves with magnetorheological fluid (mixture of iron-dust and a solvent), because i can stiffen the fluid between two solenoids to a solid, which blocks the flow or can act as a 'virtual piston', when applied to a moving tube.
For a solid-state micro-pump i can set three or more solenoids in a row over a slightly elastic hose - when i activate the solenoids in a sequence, the mr-fluid will be moved only in small but smooth steps, so i can fill and empty small volumes very precise ...
Viktor
... an dc-motor with an excenter ist the simplest way for an oszillating pump with variable sinusoidal output and precise pressure-curves over the period.
Maybe two separate (normal) pumps for static pressure and vacuum with tanks for charging and damping would be a try too for pneumatics, then you need two valves per muscle, but can act every muscle in asynchronous mode ...
For a hydraulic system you need a membrane-damper, to reduce sharp pressure-pulses, which could brake the tubes.
An interesting approach would be a setup of peristaltic pumps and valves with magnetorheological fluid (mixture of iron-dust and a solvent), because i can stiffen the fluid between two solenoids to a solid, which blocks the flow or can act as a 'virtual piston', when applied to a moving tube.
For a solid-state micro-pump i can set three or more solenoids in a row over a slightly elastic hose - when i activate the solenoids in a sequence, the mr-fluid will be moved only in small but smooth steps, so i can fill and empty small volumes very precise ...
Viktor
|
Re: Artifical Muscles October 30, 2007 04:00PM |
Admin Registered: 16 years ago Posts: 13,891 |
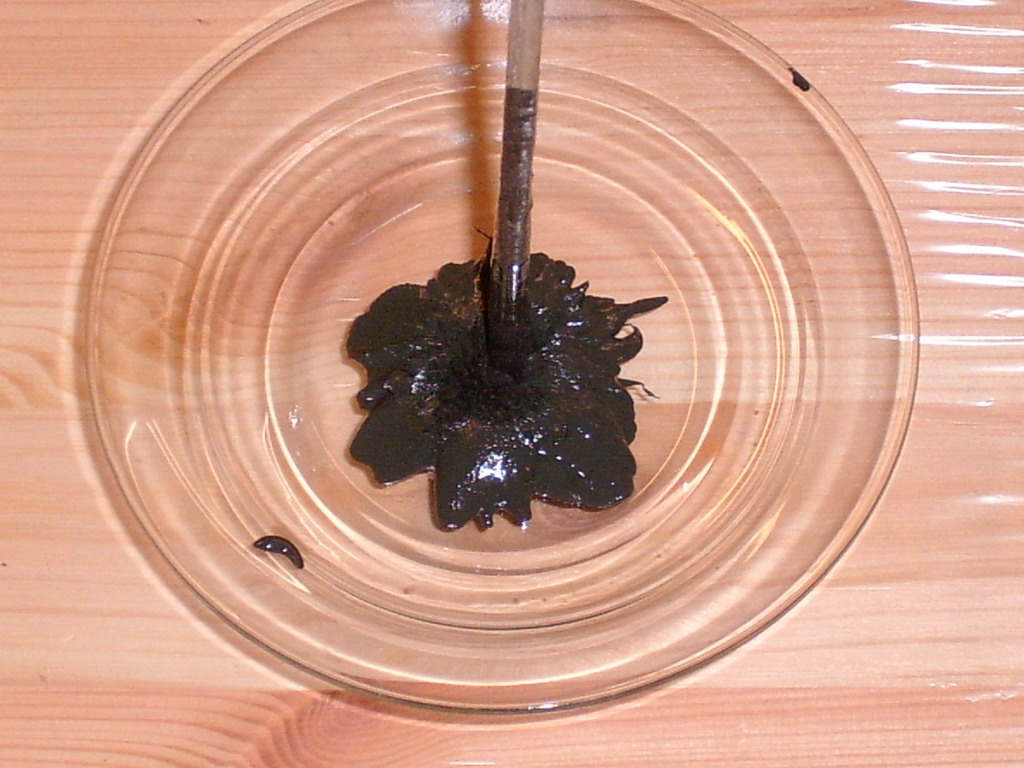
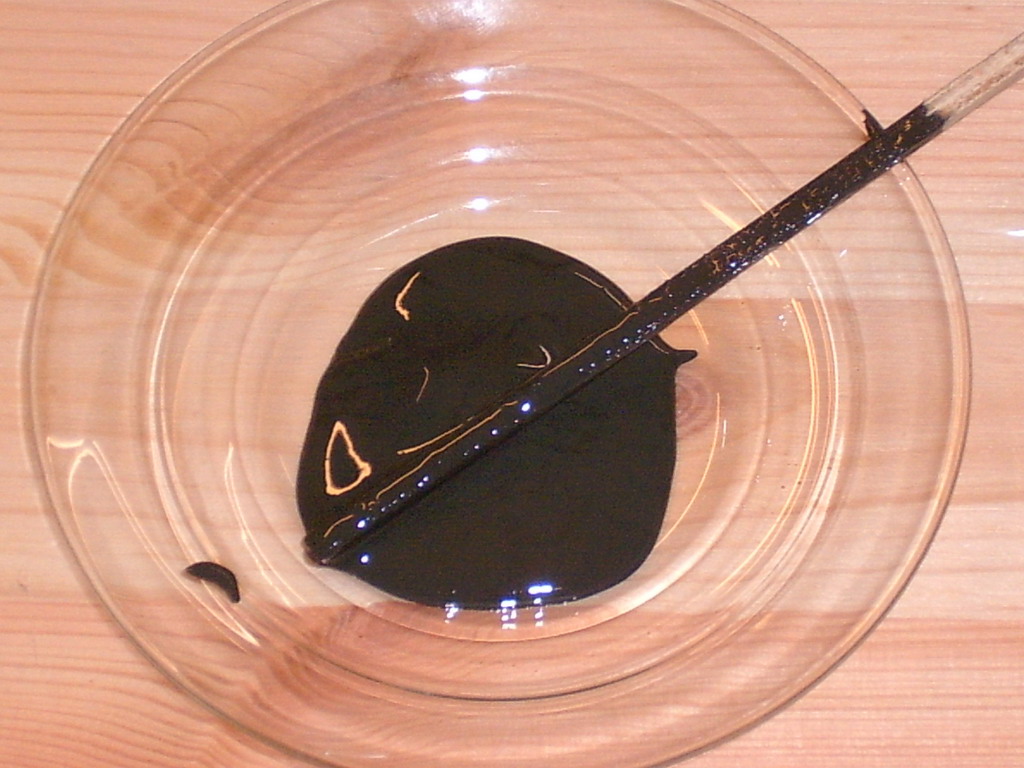
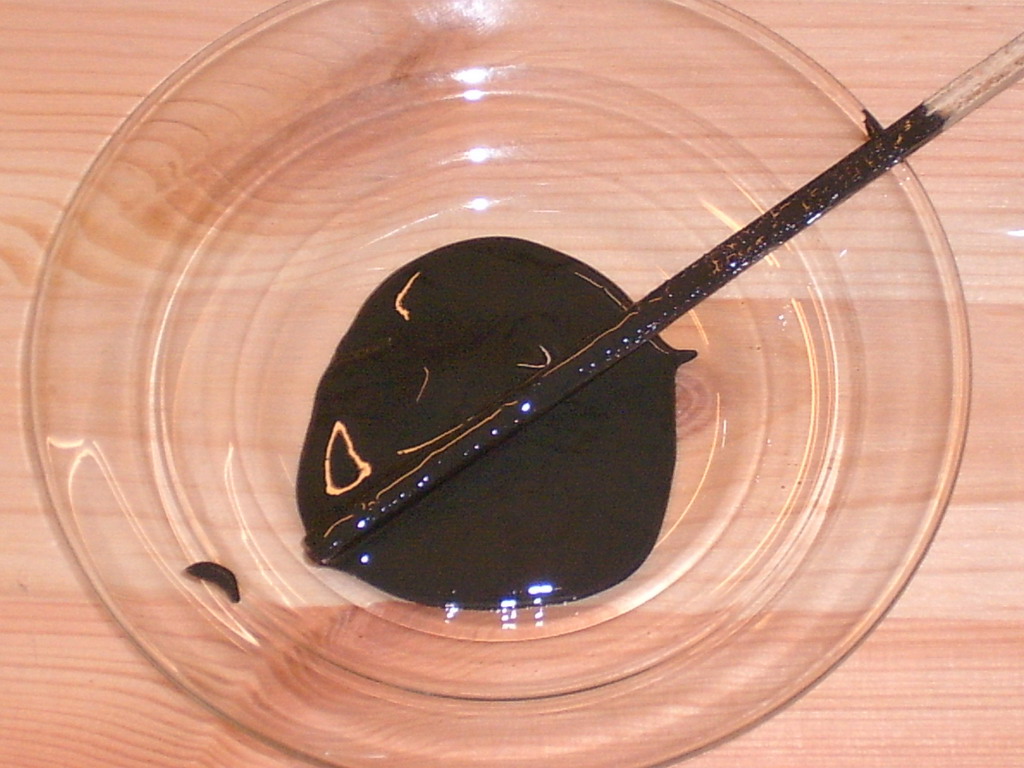
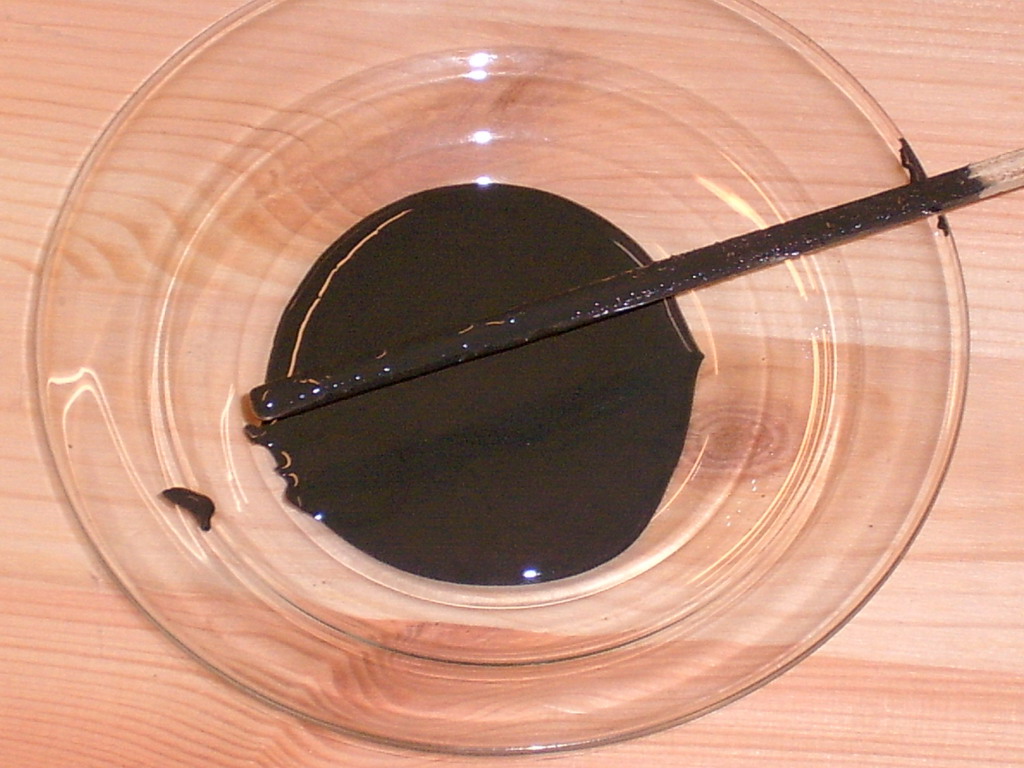
... here i have a static image-sequence of a MRF-mixture (Mangneto-Rheological-Fluid) of carbonyl-iron-microspheres, dexpanthenol and some glycerine for lower viscosity ...
As you cn see, in a magnetic field (here from some NdFeB-magnets beneath the glassplate) the fluid stiffens, so it can hold the inserted stick -- without the magnets it went fluid again, and so on, and so on ...
So this mixture can be used as self-blocking virtual valves in hoses between solenoid-cores, and as working fluid for pumping and pressure-transfer in the same setup.
Viktor
As you cn see, in a magnetic field (here from some NdFeB-magnets beneath the glassplate) the fluid stiffens, so it can hold the inserted stick -- without the magnets it went fluid again, and so on, and so on ...
So this mixture can be used as self-blocking virtual valves in hoses between solenoid-cores, and as working fluid for pumping and pressure-transfer in the same setup.
Viktor
|
Re: Artifical Muscles November 02, 2007 04:25AM |
Admin Registered: 16 years ago Posts: 13,891 |
... here's my first experience with uploading a video to youtube:
[www.youtube.com]
As you can see, i pour some MRF (Magneto-Rheological-Fluid) in the field of a neodymium-magnet, where it stiffens.
With removing the magnets it went fluid again, and with applying the magnets it got stiff again, and so on, and so on ...
Viktor
[www.youtube.com]
As you can see, i pour some MRF (Magneto-Rheological-Fluid) in the field of a neodymium-magnet, where it stiffens.
With removing the magnets it went fluid again, and with applying the magnets it got stiff again, and so on, and so on ...
Viktor
|
Re: Artifical Muscles November 02, 2007 09:53AM |
Registered: 16 years ago Posts: 82 |
Hi Viktor,
Nice. I never really knew exactly how MRFs behaved, so that video was quite informative. How much was the particular fluid you used? Could a similar one be made with just iron filings, oil, and some kind of surfactant? Also, how long is the life span of that fluid? I suppose that probably depends on what it's used for, though.
Thanks for the video!
-Samuel
Nice. I never really knew exactly how MRFs behaved, so that video was quite informative. How much was the particular fluid you used? Could a similar one be made with just iron filings, oil, and some kind of surfactant? Also, how long is the life span of that fluid? I suppose that probably depends on what it's used for, though.
Thanks for the video!
-Samuel
|
Re: Artifical Muscles November 02, 2007 10:41AM |
Admin Registered: 16 years ago Posts: 13,891 |
Hi Samuel,
... this is a mixture from carbonyl-iron-spheres (grade CC, that means nearly 50 microns diameter), vaseline and some vegetable-oil (from the kitchen) to reduce viscosity - no surfactant, because it's a MRF, not a ferrofluid ...
It stays stable over months (i have some fluid mixtures which are 5 years old and working), when i have to much oil and/or there would be sedimentation, i can easily mix it up again and it's ready for use - for 'normal' storage there is a hint to set it on a strong magnet ...
If you use oil only, the sedimentation is much faster, so some long-molecules-bases as vaseline should be intermixed - a water-soluble mixture with dexpanthenol and glycerine is an alternative basis for other powders too.
I have some kilogramm-probes of the iron-spheres in grades CC (~50 microns), HS (~20 microns) and HQ (~1-5 microns).
The discrete images are with HQ-iron and dexpanthenol+glycerine, the movie is CC-grade and Vaseline + vegetable Oil.
I have some ferrofluid-mixtures too - some commercial from Ferrofluidics/Ferrosound and some medical ff's frome german institutes, but the self-mixed setups from a friend are stabler and more effective in high-force magnetic fields, than the commercial - the commercial ones sediment after some days on the neodymium-magnets and clear oil separates from the ferrofluid ...
But for virtual valves, pumps and muscle-bending the MRF is much more usable, because the total blocking ability - ferrofluid stays liquid in the magnetic field, so no valve-/block-effect is possible ...
Viktor
Edited 1 time(s). Last edit at 11/02/2007 01:23PM by Viktor Dirks.
... this is a mixture from carbonyl-iron-spheres (grade CC, that means nearly 50 microns diameter), vaseline and some vegetable-oil (from the kitchen) to reduce viscosity - no surfactant, because it's a MRF, not a ferrofluid ...
It stays stable over months (i have some fluid mixtures which are 5 years old and working), when i have to much oil and/or there would be sedimentation, i can easily mix it up again and it's ready for use - for 'normal' storage there is a hint to set it on a strong magnet ...
If you use oil only, the sedimentation is much faster, so some long-molecules-bases as vaseline should be intermixed - a water-soluble mixture with dexpanthenol and glycerine is an alternative basis for other powders too.
I have some kilogramm-probes of the iron-spheres in grades CC (~50 microns), HS (~20 microns) and HQ (~1-5 microns).
The discrete images are with HQ-iron and dexpanthenol+glycerine, the movie is CC-grade and Vaseline + vegetable Oil.
I have some ferrofluid-mixtures too - some commercial from Ferrofluidics/Ferrosound and some medical ff's frome german institutes, but the self-mixed setups from a friend are stabler and more effective in high-force magnetic fields, than the commercial - the commercial ones sediment after some days on the neodymium-magnets and clear oil separates from the ferrofluid ...
But for virtual valves, pumps and muscle-bending the MRF is much more usable, because the total blocking ability - ferrofluid stays liquid in the magnetic field, so no valve-/block-effect is possible ...
Viktor
Edited 1 time(s). Last edit at 11/02/2007 01:23PM by Viktor Dirks.
|
Re: Artifical Muscles November 03, 2007 03:05PM |
Admin Registered: 16 years ago Posts: 13,891 |
... i found a new basis for my pastes: 'Lanolineum'or 'Cera Lanae' - it's pure wool-wax and smells strongly like sheeps, but it's soluble with water/glycerine or oil too and is only quarter the cost of dexpanthenol.
For big amounts it would be much cheaper then dexpanthenol (e.g. 8 Euros per 100 gramm, instead of nearly 30 Euros!) and it seems to do the job as well as the other mixtures, so i'll give it some days or weeks settling time ...
I mixed 4:1 HS-grade iron-spheres (~20 microns diameter) with lanolineum and thinned with glycerine, until it was a neat liquid slump, so i can 'play around' with it.
Now i'm testing the sedimentation-time and some aspects of stiffening/blocking in a magnetic field or heating/drying/sintering and melting to pure iron with a diode-laser ...
Viktor
Edited 1 time(s). Last edit at 11/03/2007 03:06PM by Viktor Dirks.
For big amounts it would be much cheaper then dexpanthenol (e.g. 8 Euros per 100 gramm, instead of nearly 30 Euros!) and it seems to do the job as well as the other mixtures, so i'll give it some days or weeks settling time ...
I mixed 4:1 HS-grade iron-spheres (~20 microns diameter) with lanolineum and thinned with glycerine, until it was a neat liquid slump, so i can 'play around' with it.
Now i'm testing the sedimentation-time and some aspects of stiffening/blocking in a magnetic field or heating/drying/sintering and melting to pure iron with a diode-laser ...
Viktor
Edited 1 time(s). Last edit at 11/03/2007 03:06PM by Viktor Dirks.
|
Re: Artifical Muscles May 01, 2009 02:21PM |
Registered: 15 years ago Posts: 248 |
I understand this may be reviving a dead thread, but I have some experience with hydraulic systems.
I am looking to build my own Darwin at the minute and got to thinking if Hydraulics could be practically applied to this type of machine. Or a future different design.
With low flow and relatively low pressure (from my perspective) we may be able to build a simple water based hydraulic system.
Stepper motors are not an easy component to assemble.
But a Hydraulic Gear pump may be a possibility.
The benefit of which is that gear pumps are easily turned into uni directional motors, where that kind of motion is required.
As the system can build glasses, cylinders should not be a challenge, a soft rubber like material could be used to make o-rings so sealing shouldn't be a problem if the pressure is low enough.
The challenge would be making some kind of electro-hydraulic valve to regulate the system.
Anno
I am looking to build my own Darwin at the minute and got to thinking if Hydraulics could be practically applied to this type of machine. Or a future different design.
With low flow and relatively low pressure (from my perspective) we may be able to build a simple water based hydraulic system.
Stepper motors are not an easy component to assemble.
But a Hydraulic Gear pump may be a possibility.
The benefit of which is that gear pumps are easily turned into uni directional motors, where that kind of motion is required.
As the system can build glasses, cylinders should not be a challenge, a soft rubber like material could be used to make o-rings so sealing shouldn't be a problem if the pressure is low enough.
The challenge would be making some kind of electro-hydraulic valve to regulate the system.
Anno

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Sorry, only registered users may post in this forum.